Спосіб обробітку ґрунту пересувним знаряддям
Номер патенту: 82958
Опубліковано: 26.05.2008
Автори: Нечуйвітер Леонід Іванович, Нечуйвітер Володимир Леонідович, Копійченко Юрій Володимирович
Формула / Реферат
1. Спосіб обробітку ґрунту пересувним знаряддям, що містить роторні робочі органи, які здійснюють примусовий обертальний рух навколо геометричної осі обертання, що паралельна поверхні ґрунту та перпендикулярна напрямку руху пересувного знаряддя відповідно напрямку швидкості обкату по поверхні ґрунту рушіями пересувного знаряддя, та робочі органи лап культиваторів-плоскорізів, виконаних у вигляді лемешів та доліт, що заглиблюються на необхідну глибину в ґрунт для попереднього обробітку ґрунту, який відрізняється тим, що кожному із робочих органів лап культиваторів-плоскорізів пересувного знаряддя в залежності від стану та властивостей ґрунту надається необхідний кут врізання в цей ґрунт, а роторному робочому органу ґрунтообробного агрегату надають такого примусового руху навколо його геометричної осі обертання, при якому величину кутової швидкості цього примусового обертового руху роторного робочого органа визначають із співвідношення:
![]() ,
,
де: ![]() - величина кутової швидкості примусового обертового руху роторного робочого органа ґрунтообробного агрегату;
- величина кутової швидкості примусового обертового руху роторного робочого органа ґрунтообробного агрегату;
![]() - коефіцієнт режиму роботи ножів роторного робочого органа;
- коефіцієнт режиму роботи ножів роторного робочого органа;
![]() - швидкість руху пересувного знаряддя;
- швидкість руху пересувного знаряддя;
![]() - радіус кола траєкторії обертання кінчиків робочої поверхні ножів роторного робочого органа навколо його геометричної осі;
- радіус кола траєкторії обертання кінчиків робочої поверхні ножів роторного робочого органа навколо його геометричної осі;
![]() - висота підняття шару ґрунту, підрізаного лемешами культиваторів-плоскорізів;
- висота підняття шару ґрунту, підрізаного лемешами культиваторів-плоскорізів;
![]() - глибина обробітку ґрунту;
- глибина обробітку ґрунту;
![]() - відстань від кінчиків робочої поверхні ножів роторного робочого органа при їх максимальному зануренні в ґрунт до площини плужної підошви;
- відстань від кінчиків робочої поверхні ножів роторного робочого органа при їх максимальному зануренні в ґрунт до площини плужної підошви;
![]() - показник наявності входження ножів роторного робочого органа в ґрунт нижче рівня плужної підошви (при
- показник наявності входження ножів роторного робочого органа в ґрунт нижче рівня плужної підошви (при ![]() входження відсутнє, а при
входження відсутнє, а при ![]() входження відбувається).
входження відбувається).
2. Спосіб обробітку ґрунту пересувним знаряддям за п. 1, який відрізняється тим, що величину коефіцієнта режиму роботи ножів роторного робочого органа визначають за залежністю:
![]() ,
,
де: ![]() - коефіцієнт урахування засміченості ґрунту бур'янами та рослинними залишками сільськогосподарської культури після проведення попередньої технологічної операції вирощування;
- коефіцієнт урахування засміченості ґрунту бур'янами та рослинними залишками сільськогосподарської культури після проведення попередньої технологічної операції вирощування;
![]() - коефіцієнт урахування перевищення нормативної швидкості обробітку ґрунту;
- коефіцієнт урахування перевищення нормативної швидкості обробітку ґрунту;
![]() - нормативна швидкість руху пересувного знаряддя, яка залежить від фізичних властивостей ґрунту;
- нормативна швидкість руху пересувного знаряддя, яка залежить від фізичних властивостей ґрунту;
![]() - коефіцієнт урахування перевищення нормативної глибини обробітку ґрунту в залежності від залишків сільськогосподарської культури, яку попередньо було вирощено;
- коефіцієнт урахування перевищення нормативної глибини обробітку ґрунту в залежності від залишків сільськогосподарської культури, яку попередньо було вирощено;
![]() - нормативна глибина обробітку ґрунту, яка залежить від запланованої до вирощування сільськогосподарської культури.
- нормативна глибина обробітку ґрунту, яка залежить від запланованої до вирощування сільськогосподарської культури.
Текст
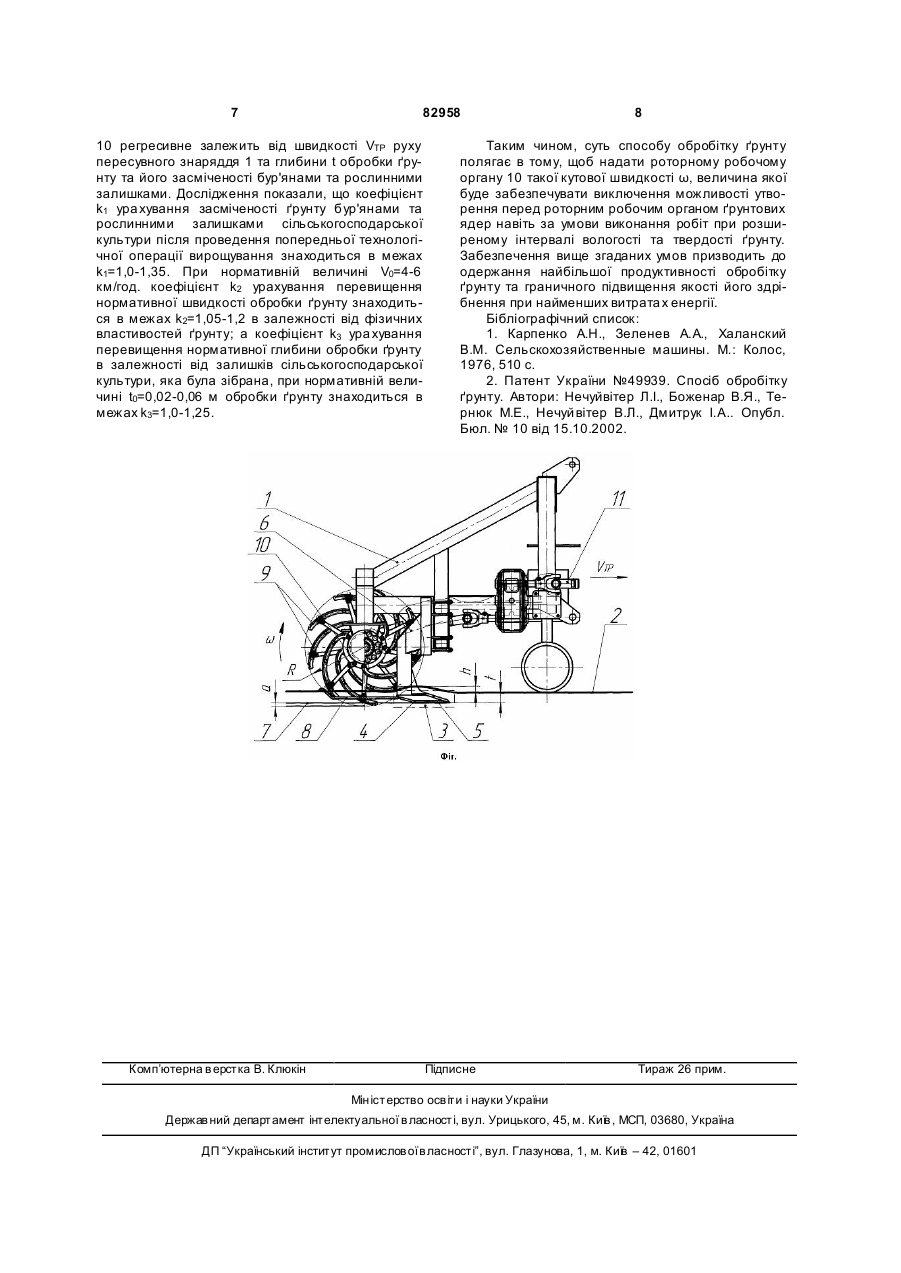
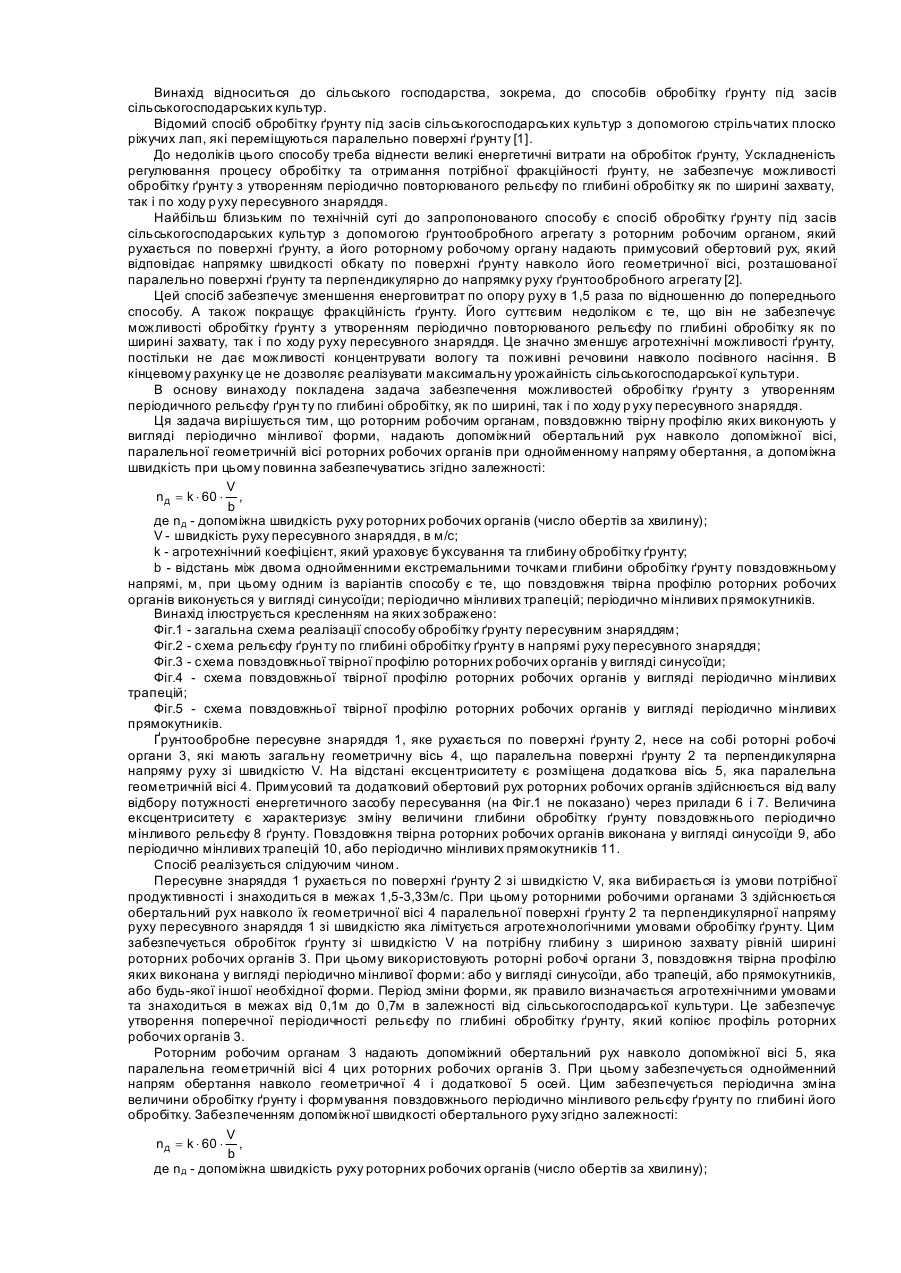
1. Спосіб обробітку ґрунту пересувним знаряддям, що містить роторні робочі органи, які здійснюють примусовий обертальний рух навколо геометричної осі обертання, що паралельна поверхні ґрунту та перпендикулярна напрямку руху пересувного знаряддя відповідно напрямку швидкості обкату по поверхні ґрун ту р ушіями пересувного знаряддя, та робочі органи лап культиваторівплоскорізів, виконаних у вигляді лемешів та доліт, що заглиблюються на необхідну глибину в ґрунт для попереднього обробітку ґрунту, який відрізняється тим, що кожному із робочих органів лап культиваторів-плоскорізів пересувного знаряддя в залежності від стану та властивостей ґрунту надається необхідний кут врізання в цей ґрунт, а роторному робочому органу ґрунтообробного агрегату надають такого примусового руху навколо його геометричної осі обертання, при якому величину кутової швидкості цього примусового обертового руху роторного робочого органа визначають із співвідношення: VTP w = k× , R - h - t - a × (- 1)n 2 (19) 1 3 82958 Винахід відноситься до сільського господарства, зокрема, до способів обробітку ґрунту під засів сільськогосподарських культур. Відомий спосіб обробітку ґрун ту під засів сільськогосподарських культур з допомогою стрілчатих плоско ріжучих лап з лемешами, які переміщуються паралельно поверхні ґрунту [1]. До недоліків цього способу слід віднести: великі енергетичні витрати на обробіток ґрунту при вузькості його використання, ускладненість регулювання процесів обробітку та отримання потрібної фракційності ґрунту, занадто великі втрати вологості ґрунту, низьку якість сепарування ґрунту. Найбільш близьким по технічній суті до запропонованого способу є спосіб обробітку ґрунту пересувним знаряддям, що вміщує роторні робочі органи, які здійснюють примусовий обертальний рух навколо геометричної вісі обертання, що паралельна поверхні ґрунту та перпендикулярна напрямку руху пересувного знаряддя, відповідно напрямку швидкості обкату по поверхні ґрунту рушіями пересувного знаряддя, та робочі органи лап культиваторів - плоскорізів, виконаних у вигляді лемешів та доліт, що заглиблюються на необхідну глибину в ґрунт для попередньої обробки ґрунту [2]. Цей спосіб забезпечує певне зменшення енерговитрат при отриманні потрібної фракційності ґрунту та значного підвищення якості сепарування ґрунту. Разом з цим, дослідження цього способу обробітку ґрунту зафіксували підвищення продуктивності в занадто обмеженому інтервалі вологості та твердості ґрунту, що вказує на вузькість його можливостей із-за відсутності регулювання необхідної величини кута входження робочих органів лап культиваторів - плоскорізів в ґрунт та безпосереднього визначення швидкості обертання роторного робочого органу при неврахуванні впливу на її величину висоти підняття шару ґрун ту, підрізаного робочими органами лап культиваторів - плоскорізів, величини входження ножів його роторних робочих органів в площину плужної підошви та регресивного характеру залежності швидкості примусового обертового руху роторних робочих органів від швидкості руху робочих органів лап культиваторів - плоскорізів, глибини обробки ґрунту та засміченості ґрунту бур'янами та пожнивними залишками. В основу винаходу покладена задача підвищення ефективності та розширення функціональних можливостей пересувного знаряддя за рахунок використання допоміжних факторів, таких, як забезпечення регулювання необхідної величини кута входження робочих органів лап культиваторів - плоскорізів в ґрунт та безпосереднього визначення швидкості обертання роторного робочого органу із врахуванням висоти підняття шару ґрунту, підрізаного робочими органами лап культиваторів - плоскорізів, величини входження ножів його роторних робочих органів в площину плужної підошви та регресивного характеру залежності швидкості примусового обертового руху роторних робочих органів від швидкості руху робочих органів лап культиваторів - плоскорізів, глибини оброб 4 ки ґрунту та засміченості його бур'янами та пожнивними залишками, що впливають на розширення меж експлуатації пересувного знаряддя без утворення ґрунтових ядер перед лапами культиваторів - плоскорізів та роторним робочим органом при значно розширених інтервалах вологості і твердості ґрунту, підвищеній засміченості ґрунту бур'янами та пожнивними залишками на всій глибині його обробітку. Ця задача вирішується тим, що кожному із робочих органів лап культиваторів - плоскорізів пересувного знаряддя в залежностівід стану та властивостей ґрунту надається необхідний кут врізання в цей ґрунт, а роторному робочому органу ґрун тообробного агрегату надають такий примусовий рух навколо його геометричної вісі обертання, при якому величину кутової швидкості цього примусового обертового руху роторного робочого органу визначають із співвідношення: VTP w = k× , R - h - t - a × (- 1)n де: ω - величина кутової швидкості примусового обертового руху роторного робочого органу ґрунтообробного агрегату; k - коефіцієнт режиму роботи ножів роторного робочого органу; VTP - швидкість руху пересувного знаряддя; R - радіус кола траєкторії обертання кінчиків робочої поверхні ножів роторного робочого органу навколо його геометричної вісі; h - висота підняття шару ґрунту, підрізаного лемешами культиваторів - плоскорізів; t - глибина обробки ґрунту; а - відстань від кінчиків робочої поверхні ножів роторного робочого органу при їх максимальному зануренні в ґрунт до площини плужної підошви; n - показник наявності входження ножів роторного робочого органу в ґрунт нижче рівня плужної підошви (при n=1 входження відсутнє, а при n=2 входження відбувається). а величину коефіцієнту режиму роботи ножів роторного робочого органу визначають за залежністю: V t k = k1 + k2 × TP + k 3 × , V0 t0 де: k1 - коефіцієнт урахування засміченості ґрунту бур'янами та рослинними залишками сільськогосподарської культури після проведення попередньої технологічної операції вирощування; k2 - коефіцієнт урахування перевищення нормативної швидкості обробки ґрунту; V0 - нормативна швидкість руху пересувного знаряддя, яка залежить від фізичних властивостей ґрунту; k3 - коефіцієнт урахування перевищення нормативної глибини обробки ґрунту в залежності від залишків сільськогосподарської культури, яку попередньо було вирощено; t0 - нормативна глибина обробки ґрунту, яка залежить від запланованої до вирощування сільськогосподарської культури. Проведення обробітку ґрунту пересувним знаряддям таким способом, при якому проводиться 5 82958 регулювання величини кута входження робочих органів лап культиваторів - плоскорізів в залежності від фізичних властивостей ґрунту при конкретному визначені швидкості обертання роторного робочого органу з додатковим урахуванням таких величин, як висота підняття шару ґр унту, підрізаного робочими органами лап культиваторів - плоскорізів, входження ножів його роторних робочих органів в площину плужної підошви, регресивність характеру залежності швидкості примусового обертового руху роторних робочих органів від швидкості руху робочих органів лап культиваторів плоскорізів, глибина обробки ґрунту та засміченості його бур'янами та пожнивними залишками, дозволяє не тільки підвищити ефективність експлуатації пересувного знаряддя та розширити функціональні можливості, але й значно збільшити його завантаженість на протязі всього року. Вказані відмінності дозволяють по-новому відноситись до можливостей такого способу обробітку ґрунту. Заявнику невідомі приклади застосування такого способу обробітку ґрунту пересувним знаряддям. Розробка такого способу обробітку ґрунту стала можливою завдяки використанню фізичних явищ, що виявили автори. На кресленні зображена схема, яка реалізує запропонований спосіб. Пересувне знаряддя 1, яке рухається по поверхні ґрунту 2 з відповідною швидкістю VTP, робочими органами 3, в складі яких лемеші 4 та долота 5, своїх лап 6 культиваторів - плоскорізів входить в ґрунт на глибину t, яка відповідає агротехнічним вимогам обробки ґрунту під певну сільськогосподарську культуру. В залежності від вологості і твердості ґрунту та засміченості його бур'янами та пожнивними залишками попередньо проводять регулювання необхідної для даних умов експлуатації пересувного знаряддя 1 величини кута входження робочих органів лап культиваторів - плоскорізів в ґр унт. При цьому при занадто великому кутовому входженні робочих органів лап культиваторів - плоскорізів в ґрунт спостерігаються надмірні енергетичні витрати, а при недостатній величині - робочі органи не входять в ґрунт. Лемеші 4 та долота 5, заглиблюючись в ґр унт на глибину t, піднімають шар ґрунту на висоту h, попередньо його руйнуючи. Здрібнена частина цього шару просипається на плужну підошву 7, а незруйновані грудки подаються на решітки 8 для сепарування, які жорстко закріплені до лап 6 культиваторів - плоскорізів. Ножі 9 роторного робочого органу 10, геометрична вісь якого розташована паралельно поверхні ґрунту та перпендикулярно напрямку руху пересувного знаряддя 1, розміщені над решітками 8 для сепарування таким чином, щоб площини їх обертання були між сусідніми прутками решіток 8 для сепарування. Кінчики робочої поверхні цих ножів 9 при обертанні роторного робочого органу 10 зі швидкістю ω навколо своєї вісі обертання утворюють коло радіуса R. В залежності від режиму роботи, якщо кінчики ножів 9 роторних робочих органів 10 при своєму заглибленні в ґрунт занурюються в площину плуж ної підошви 7, то відстань а від площини плужної 6 підошви 7 до точки їх максимального занурення будемо називати негативною, а якщо не занурюються - то позитивною. Примусовий обертальний рух роторному робочому органу 10 відповідно напрямку швидкості обкату по поверхні ґрун ту р ушіями пересувного знаряддя надається від валу відбору потужності енергетичного засобу (на кресленні не показано) через привід 11. Роторний робочий орган 10 своїми ножами 9 здрібнює грудки до величини, які відповідають агротехнічним вимогам. При цьому слід додержуватися такої швидкості обертання роторного робочого органу 3, щоб горизонтальна складова лінійної швидкості кінчиків ножів 5 в точці зіткнення їх з піднятим шаром ґрунту була більша від швидкості VТР руху пересувного знаряддя 1, що визначається співвідношенням: VTP w = k× , R - h - t - a × (- 1)n де: ω - величина кутової швидкості примусового обертового руху роторного робочого органу ґрунтообробного агрегату; k - коефіцієнт режиму роботи ножів роторного робочого органу; VТР - швидкість руху пересувного знаряддя; R - радіус кола траєкторії обертання кінчиків робочої поверхні ножів роторного робочого органу навколо його геометричної вісі; h - висота підняття шару ґрунту, підрізаного лемешами культиваторів - плоскорізів; t - глибина обробки ґрунту; а - відстань від кінчиків робочої поверхні ножів роторного робочого органу при їх максимальному зануренні в ґрунт до площини плужної підошви; n - показник наявності входження ножів роторного робочого органу в ґрунт нижче рівня плужної підошви (при n=1 входження відсутнє, а при n=2 входження відбувається). Але максимального підвищення продуктивності обробітку та збільшення інтенсифікації подрібнення ґрунту буде досягнуто коли величина коефіцієнту режиму роботи ножів роторного робочого органу визначатимуть за залежністю: V t k = k1 + k2 × TP + k 3 × , V0 t0 де: k1 - коефіцієнт урахування засміченості ґрунту бур'янами та рослинними залишками сільськогосподарської культури після проведення попередньої технологічної операції вирощування; k2 - коефіцієнт урахування перевищення нормативної швидкості обробки ґрунту; V0 - нормативна швидкість руху пересувного знаряддя, яка залежить від фізичних властивостей ґрунту; K3 - коефіцієнт урахування перевищення нормативної глибини обробки ґрунту в залежності від залишків сільськогосподарської культури, яку попередньо було вирощено; t0 - нормативна глибина обробки ґрунту, яка залежить від запланованої до вирощування сільськогосподарської культури. Таке рішення пов'язане з тим, що коефіцієнт режиму роботи ножів роторного робочого органу 7 82958 10 регресивне залежить від швидкості VТР руху пересувного знаряддя 1 та глибини t обробки ґрунту та його засміченості бур'янами та рослинними залишками. Дослідження показали, що коефіцієнт k1 ура хування засміченості ґрунту бур'янами та рослинними залишками сільськогосподарської культури після проведення попередньої технологічної операції вирощування знаходиться в межах k1=1,0-1,35. При нормативній величині V0=4-6 км/год. коефіцієнт k2 урахування перевищення нормативної швидкості обробки ґрунту знаходиться в межах k2=1,05-1,2 в залежності від фізичних властивостей ґрунту; а коефіцієнт k3 ура хування перевищення нормативної глибини обробки ґрунту в залежності від залишків сільськогосподарської культури, яка була зібрана, при нормативній величині t0=0,02-0,06 м обробки ґрунту знаходиться в межах k3=1,0-1,25. Комп’ютерна в ерстка В. Клюкін 8 Таким чином, суть способу обробітку ґрунту полягає в тому, щоб надати роторному робочому органу 10 такої кутової швидкості ω, величина якої буде забезпечувати виключення можливості утворення перед роторним робочим органом ґрунтових ядер навіть за умови виконання робіт при розширеному інтервалі вологості та твердості ґрунту. Забезпечення вище згаданих умов призводить до одержання найбільшої продуктивності обробітку ґрунту та граничного підвищення якості його здрібнення при найменших витрата х енергії. Бібліографічний список: 1. Карпенко А.Н., Зеленев А.А., Халанский В.М. Сельскохозяйственные машины. М.: Колос, 1976, 510 с. 2. Патент України №49939. Спосіб обробітку ґрунту. Автори: Нечуйвітер Л.І., Боженар В.Я., Тернюк М.Е., Нечуй вітер В.Л., Дмитрук І.А.. Опубл. Бюл. № 10 від 15.10.2002. Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for soil cultivation by travelling implement
Автори англійськоюNechuiviter Leonid Ivanovych, Kopiichenko Yurii Volodymyrovych, Nechuiviter Volodymyr Leonidovych
Назва патенту російськоюСпособ обработки почвы передвижным орудием
Автори російськоюНечуйвитер Леонид Иванович, Копийченко Юрий Владимирович, Нечуйвитер Владимир Леонидович
МПК / Мітки
МПК: A01B 49/06
Мітки: спосіб, знаряддям, пересувним, ґрунту, обробітку
Код посилання
<a href="https://ua.patents.su/4-82958-sposib-obrobitku-runtu-peresuvnim-znaryaddyam.html" target="_blank" rel="follow" title="База патентів України">Спосіб обробітку ґрунту пересувним знаряддям</a>
Спосіб обробітку ґрунту пересувним знаряддям
Номер патенту: 72026
Опубліковано: 17.01.2005
Автори: Нечуйвітер Володимир Леонідович, Трускавецький Роман Степанович, Тернюк Микола Емануілович, Нечуйвітер Леонід Іванович, Боженар Віктор Якимович
МПК: A01B 49/06
Мітки: знаряддям, ґрунту, обробітку, пересувним, спосіб
Формула / Реферат:
1. Спосіб обробітку ґрунту пересувним знаряддям, що містить роторні робочі органи, при якому здійснюють обертальний рух останніх навколо геометричної осі, що паралельна поверхні ґрунту та перпендикулярна напряму руху пересувного знаряддя, який відрізняється тим, що повздовжню твірну профілю роторних робочих органів виконують у вигляді періодично змінюваної форми, надають роторним робочим органам допоміжний обертальний рух навколо допоміжної...
Знаряддя для обробітку ґрунту
Номер патенту: 72265
Опубліковано: 15.02.2005
Автори: Кирилов Віктор Дмитрович, Кирилов Олег Дмитрович, Нечуйвітер Леонід Іванович, Нечуйвітер Володимир Леонідович
МПК: A01B 49/06
Мітки: обробітку, ґрунту, знаряддя
Формула / Реферат:
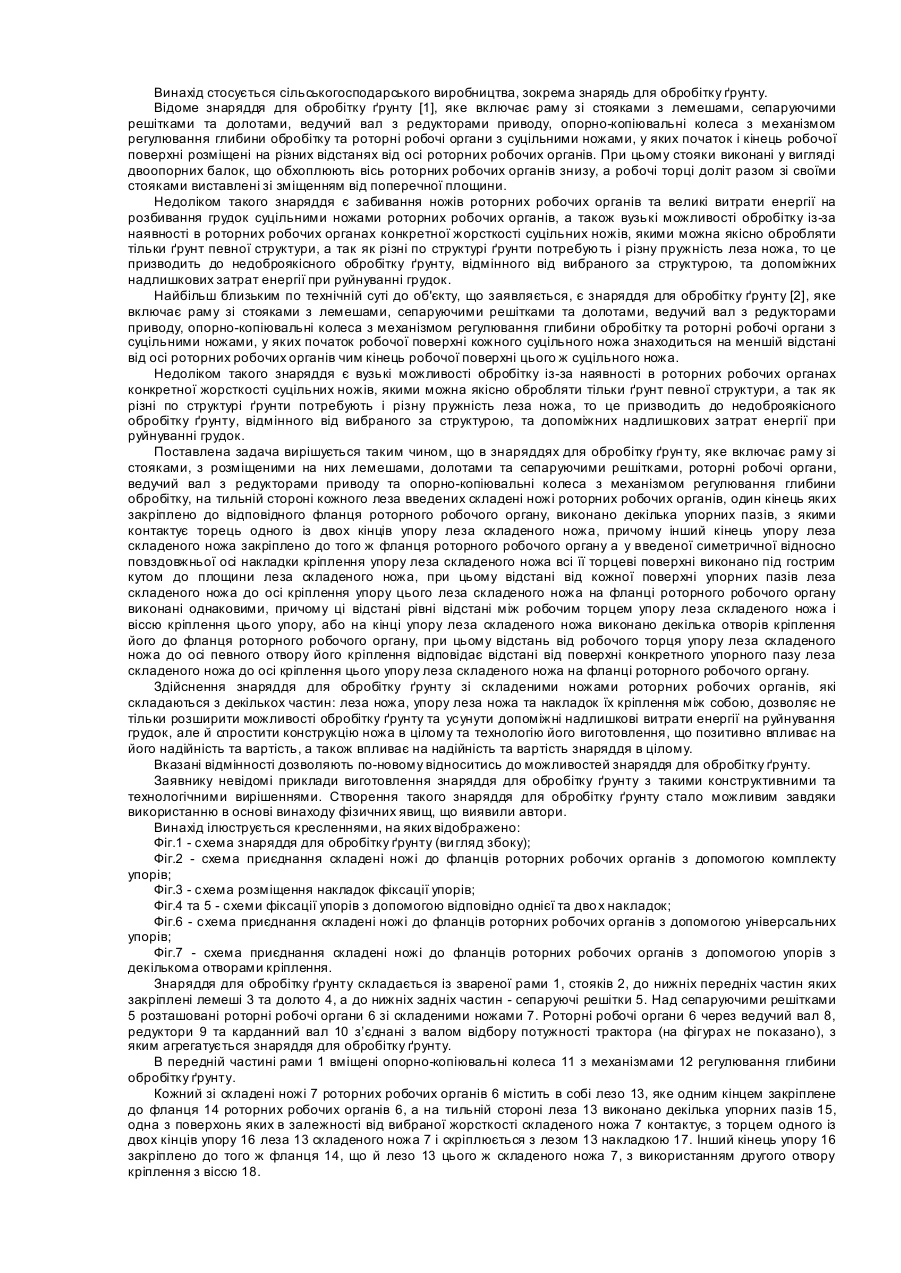
1. Знаряддя для обробітку ґрунту, що містить раму зі стояками, з розміщеними на них лемешами, долотами та сепаруючими решітками, роторні робочі органи з ведучим валом з редукторами приводу та опорно-копіювальні колеса з механізмом регулювання глибини обробітку, яке відрізняється тим, що на тильній стороні кожного леза введених складених ножів роторних робочих органів, один кінець яких закріплено до відповідного фланця роторного робочого...
Знаряддя для обробітку ґрунту
Номер патенту: 76552
Опубліковано: 15.08.2006
Автори: Нечуйвітер Володимир Леонідович, Поляков Сергій Іванович, Черевашенко Сергій Вікторович, Нечуйвітер Леонід Іванович
МПК: A01B 49/02
Мітки: знаряддя, обробітку, ґрунту
Формула / Реферат:
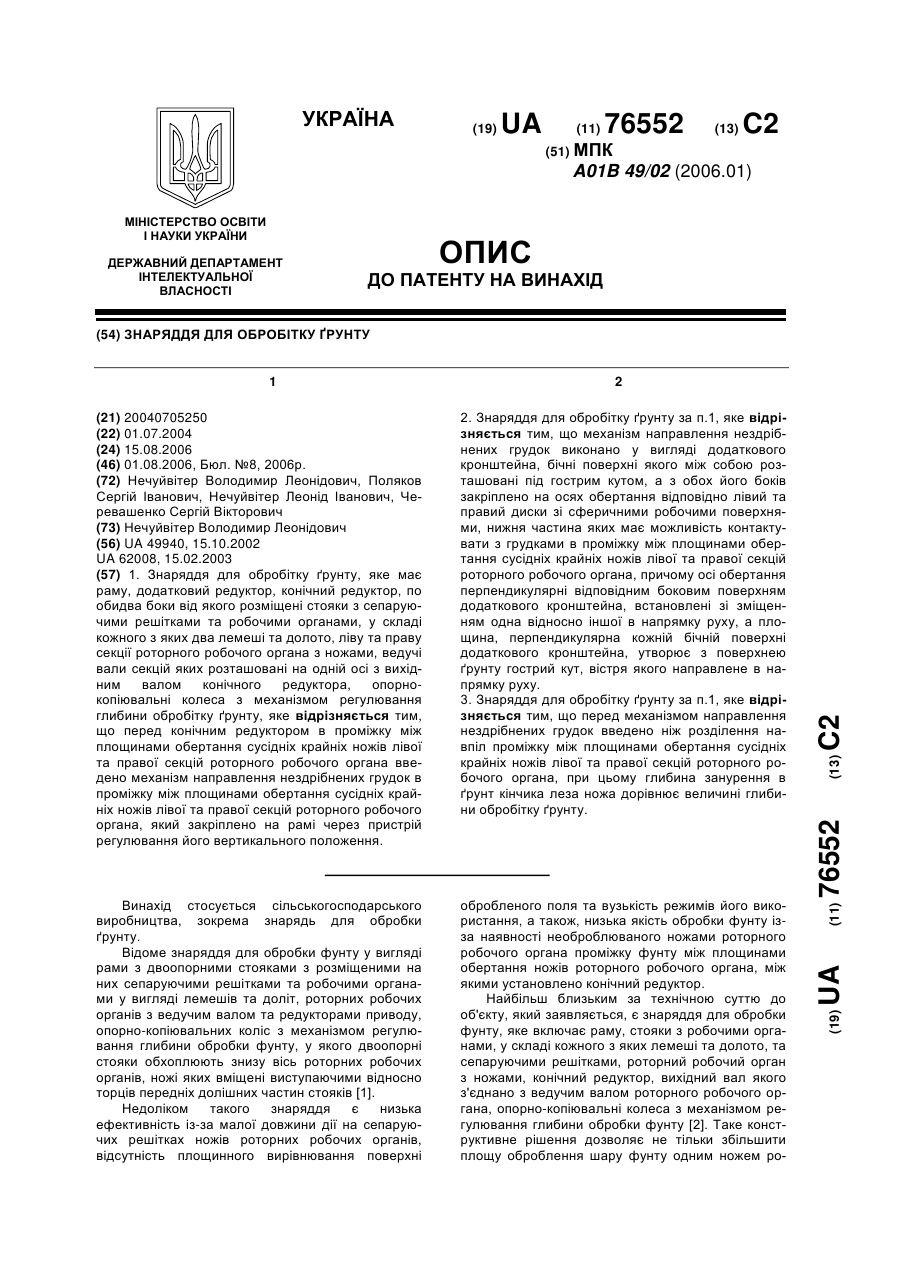
1. Знаряддя для обробітку ґрунту, яке має раму, додатковий редуктор, конічний редуктор, по обидва боки від якого розміщені стояки з сепаруючими решітками та робочими органами, у складі кожного з яких два лемеші та долото, ліву та праву секції роторного робочого органа з ножами, ведучі вали секцій яких розташовані на одній осі з вихідним валом конічного редуктора, опорно-копіювальні колеса з механізмом регулювання глибини обробітку ґрунту, яке...
Спосіб обробітку грунту
Номер патенту: 49939
Опубліковано: 15.10.2002
Автори: Боженар Віктор Якимович, Ситник Сергій Валентинович, Тернюк Микола Емануїлович, Нечуйвітер Володимир Леонідович, Нечуйвітер Леонід Іванович, Дмитрук Іван Андрійович
МПК: A01B 49/02
Мітки: грунту, обробітку, спосіб
Формула / Реферат:
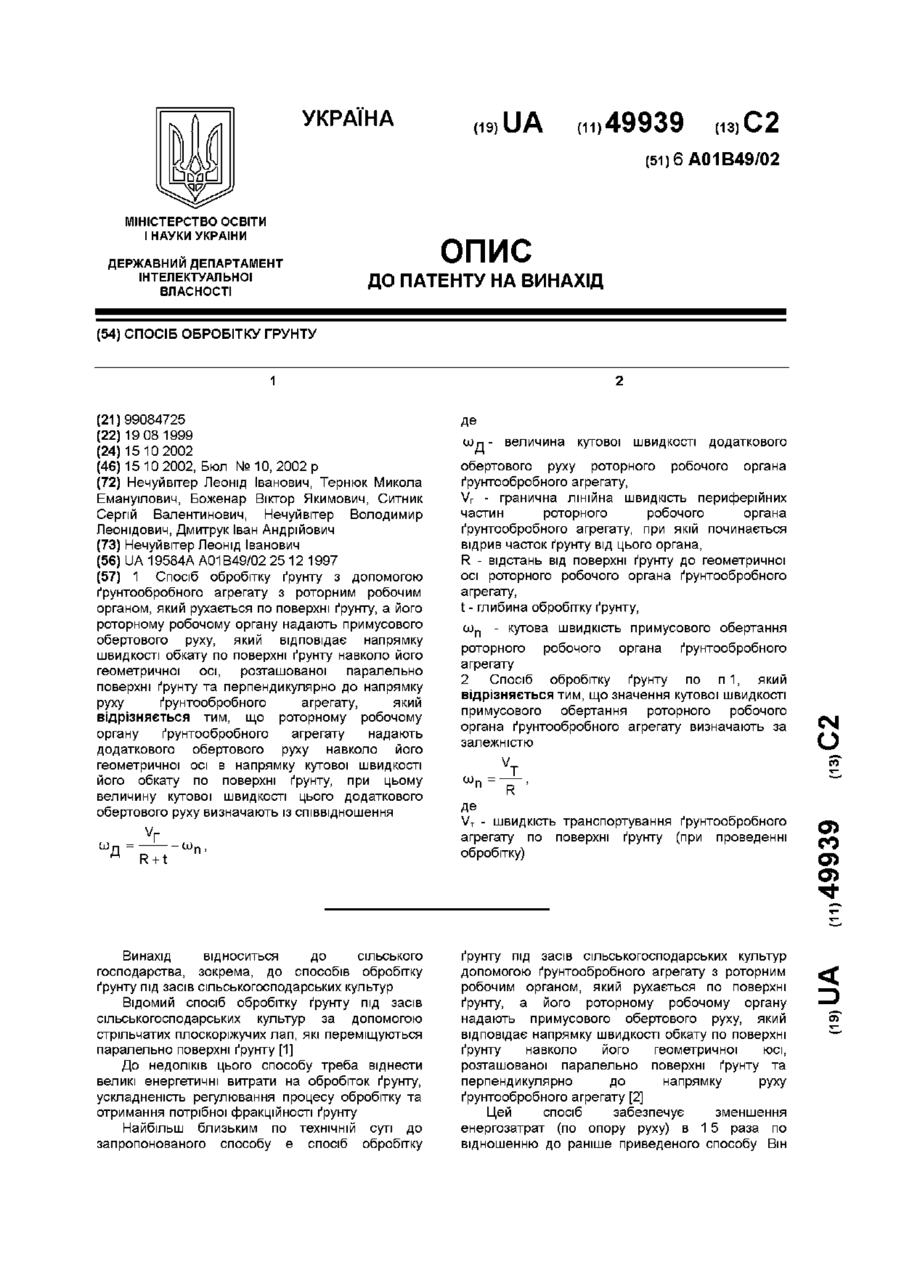
1. Спосіб обробітку ґрунту з допомогою ґрунтообробного агрегату з роторним робочим органом, який рухається по поверхні ґрунту, а його роторному робочому органу надають примусового обертового руху, який відповідає напрямку швидкості обкату по поверхні ґрунту навколо його геометричної осі, розташованої паралельно поверхні ґрунту та перпендикулярно до напрямку руху ґрунтообробного агрегату, який відрізняється тим, що роторному робочому органу...
Знаряддя для обробітку ґрунту
Номер патенту: 62008
Опубліковано: 15.12.2003
Автори: Нечуйвітер Леонід Іванович, Кирилов Олег Дмитрович, Кирилов Віктор Дмитрович, Нечуйвітер Володимир Леонідович
МПК: A01B 49/02
Мітки: ґрунту, обробітку, знаряддя
Формула / Реферат:
1. Знаряддя для обробітку ґрунту, яке включає раму зі стояками з розміщеними на них лемешами, долотами та сепаруючими решітками, роторні робочі органи з ведучим валом і редукторами приводу та опорно-копіювальні колеса з механізмом регулювання глибини обробітку, яке відрізняється тим, що введені поперечні планки кріплення задніх кінців прутків сепаруючих решіток, причому задні кінці прутків кожної сепаруючої решітки виконані вигнутими по дузі...
Попередній патент: Двокомпонентна система епоксиамінової грунтовки та епоксифункціональний подовжений уретан
Наступний патент: Шихта для агломерації залізняку і концентратів (варіанти)
Випадковий патент: Завіса для навішування стулок