Спосіб обробітку ґрунту пересувним знаряддям
Номер патенту: 72026
Опубліковано: 17.01.2005
Автори: Нечуйвітер Леонід Іванович, Нечуйвітер Володимир Леонідович, Трускавецький Роман Степанович, Боженар Віктор Якимович, Тернюк Микола Емануілович

Формула / Реферат
1. Спосіб обробітку ґрунту пересувним знаряддям, що містить роторні робочі органи, при якому здійснюють обертальний рух останніх навколо геометричної осі, що паралельна поверхні ґрунту та перпендикулярна напряму руху пересувного знаряддя, який відрізняється тим, що повздовжню твірну профілю роторних робочих органів виконують у вигляді періодично змінюваної форми, надають роторним робочим органам допоміжний обертальний рух навколо допоміжної осі, паралельної геометричній осі роторних робочих органів при однойменному напряму обертання, і забезпечують їх допоміжну швидкість згідно з залежністю:
де ![]() - допоміжна швидкість руху роторних робочих органів (число обертів за хвилину);
- допоміжна швидкість руху роторних робочих органів (число обертів за хвилину);
V - швидкість руху пересувного знаряддя, в м/с;
k - агротехнічний коефіцієнт, який ураховує буксування та глибину обробітку ґрунту;
b - відстань між двома однойменними екстремальними точками глибини обробітку ґрунту у повздовжньому напрямі, в м.
2. Спосіб обробітку ґрунту пересувним знаряддям за п. 1, який відрізняється тим, що повздовжню твірну профілю роторних робочих органів виконують у вигляді синусоїди.
3. Спосіб обробітку ґрунту пересувним знаряддям за п. 1, який відрізняється тим, що повздовжню твірну профілю роторних робочих органів виконують у вигляді періодично змінюваних трапецій.
4. Спосіб обробітку ґрунту пересувним знаряддям за п. 1, який відрізняється тим, що повздовжню твірну профілю роторних робочих органів виконують у вигляді періодично змінюваних прямокутників.
Текст
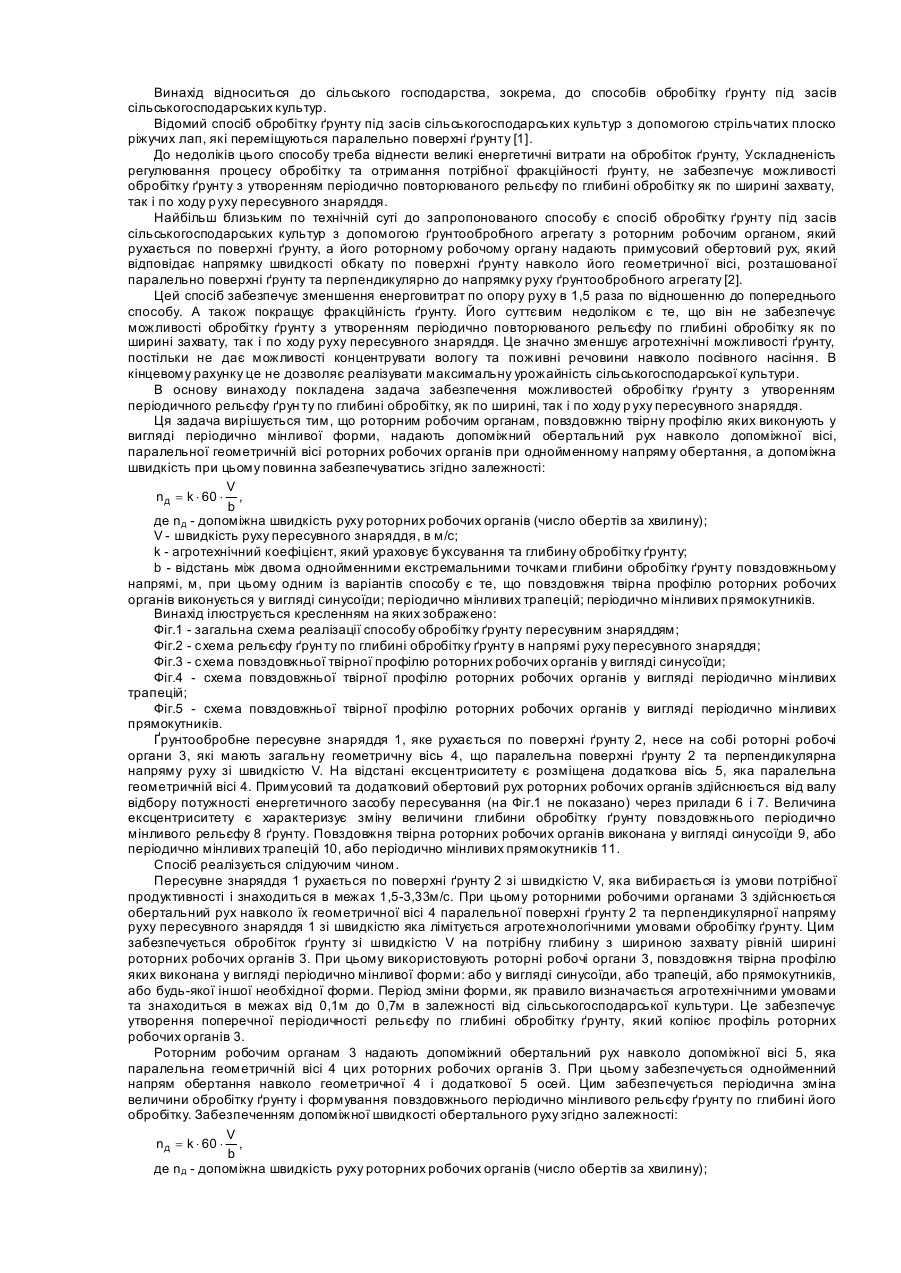
Винахід відноситься до сільського господарства, зокрема, до способів обробітку ґрунту під засів сільськогосподарських культур. Відомий спосіб обробітку ґрунту під засів сільськогосподарських культур з допомогою стрільчатих плоско ріжучих лап, які переміщуються паралельно поверхні ґрунту [1]. До недоліків цього способу треба віднести великі енергетичні витрати на обробіток ґрунту, Ускладненість регулювання процесу обробітку та отримання потрібної фракційності ґрунту, не забезпечує можливості обробітку ґрунту з утворенням періодично повторюваного рельєфу по глибині обробітку як по ширині захвату, так і по ходу р уху пересувного знаряддя. Найбільш близьким по технічній суті до запропонованого способу є спосіб обробітку ґрунту під засів сільськогосподарських культур з допомогою ґрунтообробного агрегату з роторним робочим органом, який рухається по поверхні ґрунту, а його роторному робочому органу надають примусовий обертовий рух, який відповідає напрямку швидкості обкату по поверхні ґрунту навколо його геометричної вісі, розташованої паралельно поверхні ґрунту та перпендикулярно до напрямку руху ґрунтообробного агрегату [2]. Цей спосіб забезпечує зменшення енерговитрат по опору руху в 1,5 раза по відношенню до попереднього способу. А також покращує фракційність ґрунту. Його суттєвим недоліком є те, що він не забезпечує можливості обробітку ґрунту з утворенням періодично повторюваного рельєфу по глибині обробітку як по ширині захвату, так і по ходу руху пересувного знаряддя. Це значно зменшує агротехнічні можливості ґрунту, постільки не дає можливості концентрувати вологу та поживні речовини навколо посівного насіння. В кінцевому рахунку це не дозволяє реалізувати максимальну урожайність сільськогосподарської культури. В основу винаходу покладена задача забезпечення можливостей обробітку ґрунту з утворенням періодичного рельєфу ґрун ту по глибині обробітку, як по ширині, так і по ходу р уху пересувного знаряддя. Ця задача вирішується тим, що роторним робочим органам, повздовжню твірну профілю яких виконують у вигляді періодично мінливої форми, надають допоміжний обертальний рух навколо допоміжної вісі, паралельної геометричній вісі роторних робочих органів при однойменному напряму обертання, а допоміжна швидкість при цьому повинна забезпечуватись згідно залежності: V n д = k × 60 × , b де nд - допоміжна швидкість руху роторних робочих органів (число обертів за хвилину); V - швидкість руху пересувного знаряддя, в м/с; k - агротехнічний коефіцієнт, який ураховує буксування та глибину обробітку ґрунту; b - відстань між двома однойменними екстремальними точками глибини обробітку ґрунту повздовжньому напрямі, м, при цьому одним із варіантів способу є те, що повздовжня твірна профілю роторних робочих органів виконується у вигляді синусоїди; періодично мінливих трапецій; періодично мінливих прямокутників. Винахід ілюструється кресленням на яких зображено: Фіг.1 - загальна схема реалізації способу обробітку ґрунту пересувним знаряддям; Фіг.2 - схема рельєфу ґрун ту по глибині обробітку ґрунту в напрямі руху пересувного знаряддя; Фіг.3 - схема повздовжньої твірної профілю роторних робочих органів у вигляді синусоїди; Фіг.4 - схема повздовжньої твірної профілю роторних робочих органів у вигляді періодично мінливих трапецій; Фіг.5 - схема повздовжньої твірної профілю роторних робочих органів у вигляді періодично мінливих прямокутників. Ґрунтообробне пересувне знаряддя 1, яке рухається по поверхні ґрунту 2, несе на собі роторні робочі органи 3, які мають загальну геометричну вісь 4, що паралельна поверхні ґрунту 2 та перпендикулярна напряму руху зі швидкістю V. На відстані ексцентриситету є розміщена додаткова вісь 5, яка паралельна геометричній вісі 4. Примусовий та додатковий обертовий рух роторних робочих органів здійснюється від валу відбору потужності енергетичного засобу пересування (на Фіг.1 не показано) через прилади 6 і 7. Величина ексцентриситету є характеризує зміну величини глибини обробітку ґрунту повздовжнього періодично мінливого рельєфу 8 ґрунту. Повздовжня твірна роторних робочих органів виконана у вигляді синусоїди 9, або періодично мінливих трапецій 10, або періодично мінливих прямокутників 11. Спосіб реалізується слідуючим чином. Пересувне знаряддя 1 рухається по поверхні ґрунту 2 зі швидкістю V, яка вибирається із умови потрібної продуктивності і знаходиться в межах 1,5-3,33м/с. При цьому роторними робочими органами 3 здійснюється обертальний рух навколо їх геометричної вісі 4 паралельної поверхні ґрунту 2 та перпендикулярної напряму руху пересувного знаряддя 1 зі швидкістю яка лімітується агротехнологічними умовами обробітку ґрунту. Цим забезпечується обробіток ґрунту зі швидкістю V на потрібну глибину з шириною захвату рівній ширині роторних робочих органів 3. При цьому використовують роторні робочі органи 3, повздовжня твірна профілю яких виконана у вигляді періодично мінливої форми: або у вигляді синусоїди, або трапецій, або прямокутників, або будь-якої іншої необхідної форми. Період зміни форми, як правило визначається агротехнічними умовами та знаходиться в межах від 0,1м до 0,7м в залежності від сільськогосподарської культури. Це забезпечує утворення поперечної періодичності рельєфу по глибині обробітку ґрунту, який копіює профіль роторних робочих органів 3. Роторним робочим органам 3 надають допоміжний обертальний рух навколо допоміжної вісі 5, яка паралельна геометричній вісі 4 цих роторних робочих органів 3. При цьому забезпечується однойменний напрям обертання навколо геометричної 4 і додаткової 5 осей. Цим забезпечується періодична зміна величини обробітку ґрунту і формування повздовжнього періодично мінливого рельєфу ґрунту по глибині його обробітку. Забезпеченням допоміжної швидкості обертального руху згідно залежності: V n д = k × 60 × , b де nд - допоміжна швидкість руху роторних робочих органів (число обертів за хвилину); V - швидкість руху пересувного знаряддя, в м/с; ; k - агротехнічний коефіцієнт, який ураховує буксування та глибину обробітку ґрунту; b - відстань між двома однойменними екстремальними точками глибини обробітку ґрунту повздовжньому напрямі, м, формується необхідний крок b рельєфу 8, як відстань між двома екстремальними точками глибини обробітку ґрунту в поздовжньому напрямі, та який визначається агро технологією вирощуванню сільськогосподарської культури і в більшості випадків знаходиться в межах 0,1-0,7м. Використання агротехнічного коефіцієнту к, дозволяє враховувати реальні величини буксування та глибини обробітку ґрунту і, як правило, він знаходиться в межах 1,01-1,05. Залежність між числом обертів nд допоміжного руху роторних робочих органів 3 та вказаними в ній іншими параметрами витікає із умови, що один додатковий оберт роторних робочих органів 3 повинен здійснюватись при переміщенні пересувного знаряддя 1 зі швидкістю V на відстань b. Амплітуда повздовжній періодичності при цьому дорівнює подвоєній відстані між геометричною 4 та допоміжною 5 осями роторних робочих органів 3, тобто дорівнює 2е. Ця амплітуда для більшості сільськогосподарських культур дорівнює 0,01м-0,1м. Таким чином сукупність вказаних в формулі винаходу ознак дозволяє досягти мети винаходу і утворити рельєф, який періодично повторюється по глибині обробітку як по ширині захвату (або поз.9, або поз. 10, або поз.11), так і по ходу р уху пересувного знаряддя 1 (поз.8) з дотриманням раціональних умов агроте хнології. Бібліографічний список: 1. Карпенко А.Н., Зеленев А.А., Халанский В.Μ.. Сельскохозяйственные машины. М.: Колос, 1976, 510с. 2. Патент України №19584 А. Знаряддя для обробітку ґрунту. Автори: Пащенко В.Ф., Медведев В.В., Слободюк П.І. та інші. Опуб. БІ №6 від 25.12.97.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of cultivating the soil with a movable implement
Автори англійськоюNechuiviter Leonid Ivanovych, Terniuk Mykola Emanuilovych, Truskavetskyi Roman Stepanovych, Nechuiviter Volodymyr Leonidovych
Назва патенту російськоюСпособ обработки почвы передвижным орудием
Автори російськоюНечуйвитер Леонид Иванович, Тернюк Николай Эммануилович, Трускавецкий Роман Степанович, Нечуйвитер Владимир Леонидович
МПК / Мітки
МПК: A01B 49/06
Мітки: обробітку, знаряддям, спосіб, ґрунту, пересувним
Код посилання
<a href="https://ua.patents.su/3-72026-sposib-obrobitku-runtu-peresuvnim-znaryaddyam.html" target="_blank" rel="follow" title="База патентів України">Спосіб обробітку ґрунту пересувним знаряддям</a>
Знаряддя для обробітку ґрунту
Номер патенту: 62009
Опубліковано: 15.12.2003
Автори: Кирилов Віктор Дмитрович, Кирилов Олег Дмитрович, Нечуйвітер Леонід Іванович, Нечуйвітер Володимир Леонідович
МПК: A01B 49/02, A01B 33/00
Мітки: обробітку, ґрунту, знаряддя
Формула / Реферат:
1. Знаряддя для обробітку ґрунту, яке включає раму зі стояками з лемешами, долотами та сепаруючими решітками, роторні робочі органи з ведучим валом, конічний та у вигляді двоступінчастого зі сталим передаточним відношенням додатковий редуктори з карданним валом між ними та опорно-копіювальні колеса з механізмом регулювання глибини обробітку ґрунту, яке відрізняється тим, що у додатковому редукторі з поздовжньою площиною симетрії корпусу...
Знаряддя для обробітку ґрунту
Номер патенту: 62008
Опубліковано: 15.12.2003
Автори: Нечуйвітер Леонід Іванович, Кирилов Олег Дмитрович, Нечуйвітер Володимир Леонідович, Кирилов Віктор Дмитрович
МПК: A01B 49/02
Мітки: ґрунту, обробітку, знаряддя
Формула / Реферат:
1. Знаряддя для обробітку ґрунту, яке включає раму зі стояками з розміщеними на них лемешами, долотами та сепаруючими решітками, роторні робочі органи з ведучим валом і редукторами приводу та опорно-копіювальні колеса з механізмом регулювання глибини обробітку, яке відрізняється тим, що введені поперечні планки кріплення задніх кінців прутків сепаруючих решіток, причому задні кінці прутків кожної сепаруючої решітки виконані вигнутими по дузі...
Знаряддя для обробітку ґрунту
Номер патенту: 62006
Опубліковано: 15.12.2003
Автори: Кирилов Олег Дмитрович, Нечуйвітер Володимир Леонідович, Кирилов Віктор Дмитрович, Нечуйвітер Леонід Іванович
МПК: A01B 49/02
Мітки: знаряддя, ґрунту, обробітку
Формула / Реферат:
Знаряддя для обробітку ґрунту, яке включає раму з виконаними у вигляді двоопорних балок стояками з розміщеними на них лемешами, долотами та сепаруючими решітками, роторні робочі органи з ведучим валом і редукторами приводу та опорно-копіювальні колеса з механізмом регулювання глибини обробітку, яке відрізняється тим, що ширина обробітку ґрунту одним стояком, яка утворена передніми різальними поверхнями лемеша стояка, більша ширини тильного...
Спосіб обробітку грунту
Номер патенту: 49939
Опубліковано: 15.10.2002
Автори: Ситник Сергій Валентинович, Нечуйвітер Володимир Леонідович, Боженар Віктор Якимович, Дмитрук Іван Андрійович, Нечуйвітер Леонід Іванович, Тернюк Микола Емануїлович
МПК: A01B 49/02
Мітки: спосіб, обробітку, грунту
Формула / Реферат:
1. Спосіб обробітку ґрунту з допомогою ґрунтообробного агрегату з роторним робочим органом, який рухається по поверхні ґрунту, а його роторному робочому органу надають примусового обертового руху, який відповідає напрямку швидкості обкату по поверхні ґрунту навколо його геометричної осі, розташованої паралельно поверхні ґрунту та перпендикулярно до напрямку руху ґрунтообробного агрегату, який відрізняється тим, що роторному робочому органу...
Знаряддя для обробітку грунту
Номер патенту: 50839
Опубліковано: 15.11.2002
Автори: Кирилов Віктор Дмитрович, Нечуйвітер Леонід Іванович, Кирилов Олег Дмитрович, Нечуйвітер Володимир Леонідович
МПК: A01B 49/06
Мітки: обробітку, знаряддя, грунту
Формула / Реферат:
1. Знаряддя для обробітку грунту, яке включає раму зі стояками з лемішами, сепаруючими решітками та долотами, ведучий вал, роторні робочі органи з ножами, у яких початок і кінець робочої поверхні розміщені на різних віддалях від осі роторних робочих органів, яке відрізняється тим, що початок робочої поверхні кожного ножа знаходиться на меншій віддалі від осі роторних робочих органів чим кінець робочої поверхні цього ж ножа.2. Знаряддя...