Імітаційна модель дизеля
Номер патенту: 83314
Опубліковано: 10.09.2013
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович, Сопін Павло Костянтинович
Формула / Реферат
Імітаційна модель дизеля, що містить постійні часу Т1, Т2, Т3 і коефіцієнт передачі К, яка відрізняється тим, що введені датчик (1) параметрів Т1, Т2, Т3 і К, цифрова модель ланки першого порядку (2), що складається з послідовно сполучених компаратора (4), множника (5), другий вхід якого сполучений з виходом перетворювача (8) сигналу датчика параметра Т1, інтегратора (6), вихід якого сполучений з інверсним входом компаратора (4) і з входом компаратора (4) цифрової моделі ланки другого порядку (3), сполученого з множником (5), два інші входи якого сполучено з виходом перетворювача (8) датчика параметра Т2, вихід множника (5) підключений до входу інтегратора (6), вихід якого сполучений з входом другого інтегратора (6) і входом другого множника (5), на другий вхід якого поданий сигнал датчика параметра Т3, а його вихід сполучений з входом суматора (7), другий вхід якого сполучений з виходом другого інтегратора (6), а вихід підключений до інверсного входу компаратора (4) ланки (3), причому виходом моделі служить множник (5) вихідного сигналу другого інтегратора (6) на коефіцієнт передачі моделі К.
Текст
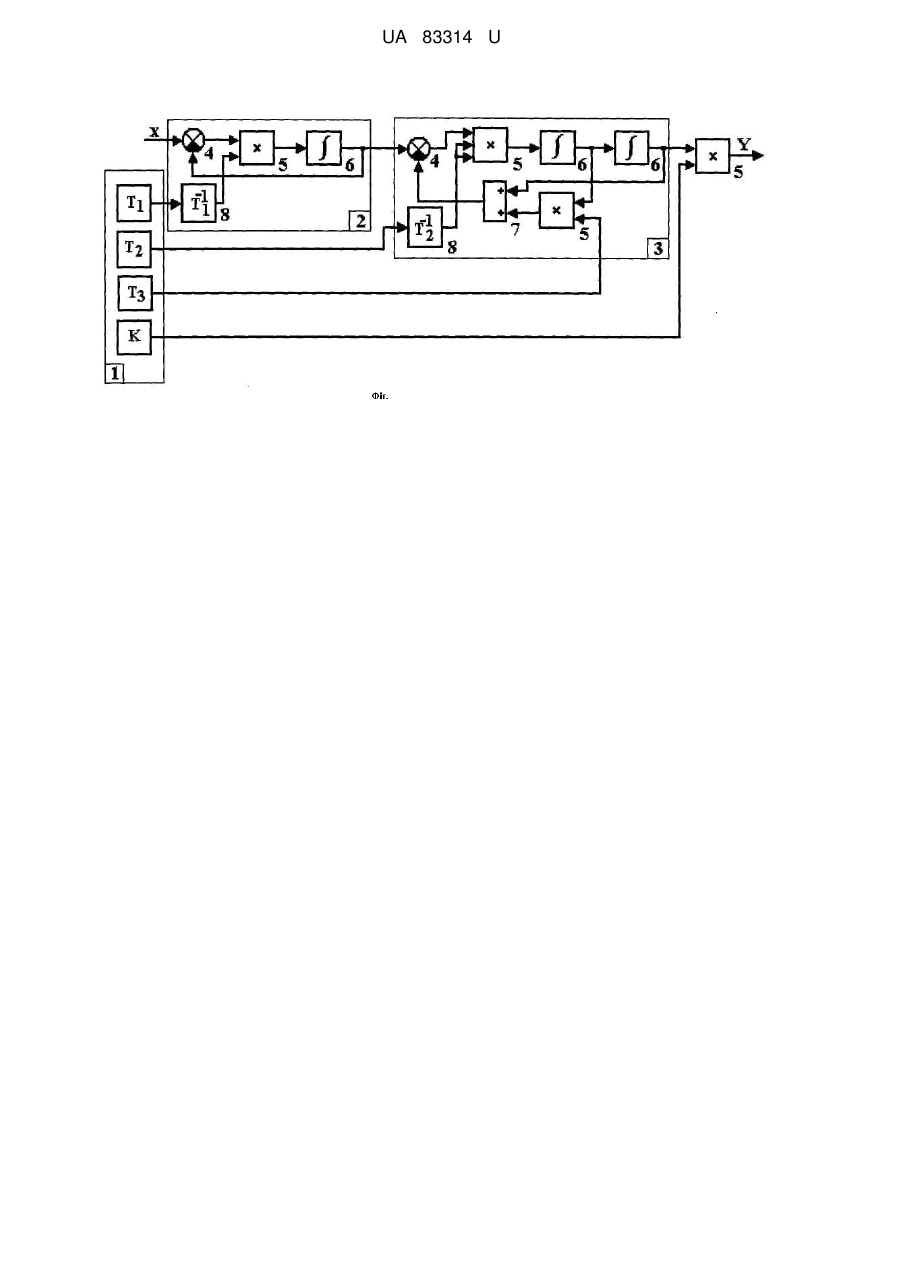
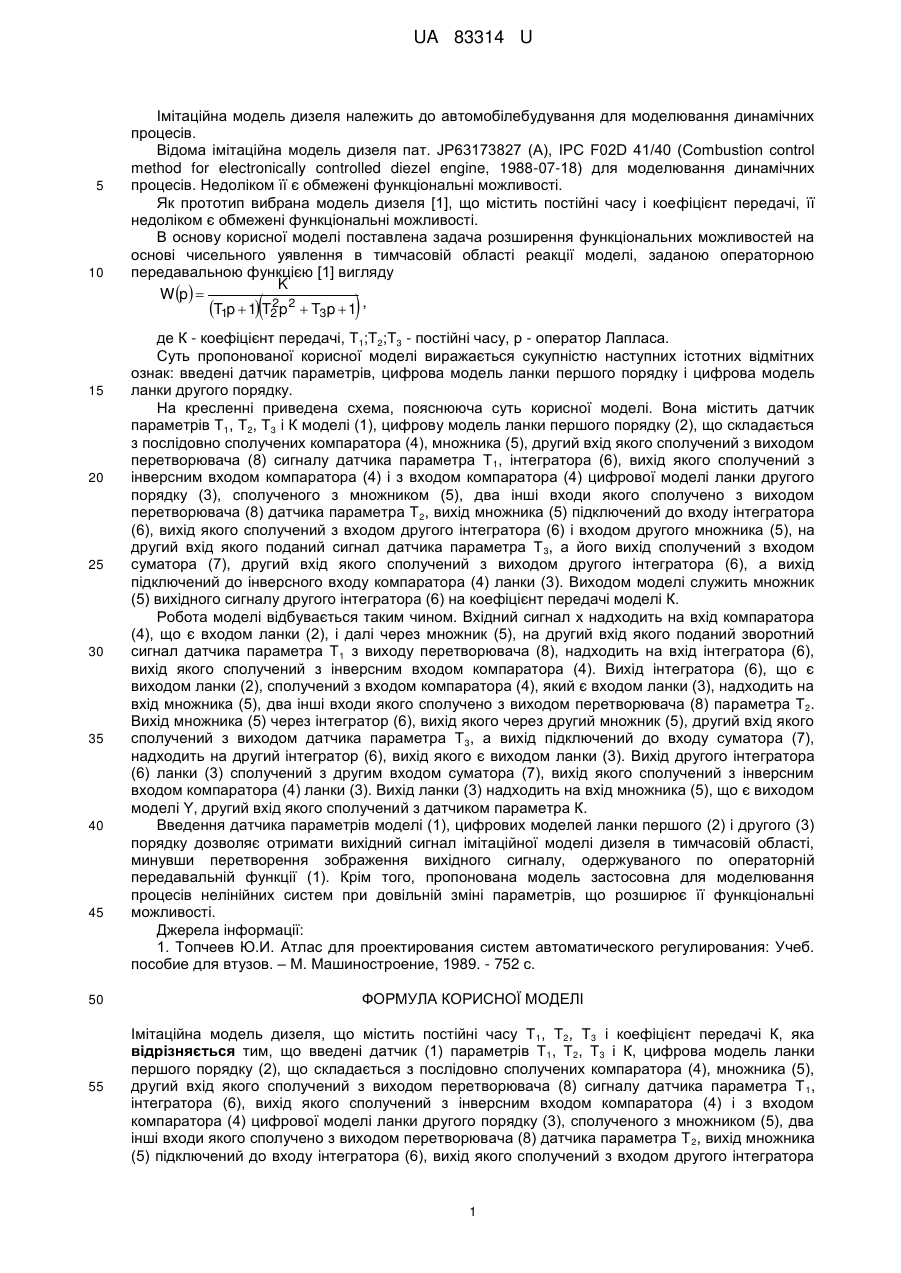
Реферат: Імітаційна модель дизеля містить постійні часу Т 1, Т2, Т3 і коефіцієнт передачі К, датчик (1) параметрів Т1, Т2, Т3 і К. Цифрова модель ланки першого порядку (2) складається з послідовно сполучених компаратора (4), множника (5), другий вхід якого сполучений з виходом перетворювача (8) сигналу датчика параметра Т 1, інтегратора (6), вихід якого сполучений з інверсним входом компаратора (4) і з входом компаратора (4) цифрової моделі ланки другого порядку (3), сполученого з множником (5), два інші входи якого сполучено з виходом перетворювача (8) датчика параметра Т 2, вихід множника (5) підключений до входу інтегратора (6), вихід якого сполучений з входом другого інтегратора (6) і входом другого множника (5), на другий вхід якого подається сигнал датчика параметра Т 3, а його вихід сполучений з входом суматора (7), другий вхід якого сполучений з виходом другого інтегратора (6), а вихід підключений до інверсного входу компаратора (4) ланки (3). Виходом моделі служить множник (5) вихідного сигналу другого інтегратора (6) на коефіцієнт передачі моделі К. UA 83314 U (12) UA 83314 U UA 83314 U 5 10 Імітаційна модель дизеля належить до автомобілебудування для моделювання динамічних процесів. Відома імітаційна модель дизеля пат. JP63173827 (А), ІРС F02D 41/40 (Combustion control method for electronically controlled diezel engine, 1988-07-18) для моделювання динамічних процесів. Недоліком її є обмежені функціональні можливості. Як прототип вибрана модель дизеля [1], що містить постійні часу і коефіцієнт передачі, її недоліком є обмежені функціональні можливості. В основу корисної моделі поставлена задача розширення функціональних можливостей на основі чисельного уявлення в тимчасовій області реакції моделі, заданою операторною передавальною функцією [1] вигляду K W p 2 2 T1p 1 T2 p T3p 1 , 15 20 25 30 35 40 45 50 55 де К - коефіцієнт передачі, Т1;Т2;Т3 - постійні часу, р - оператор Лапласа. Суть пропонованої корисної моделі виражається сукупністю наступних істотних відмітних ознак: введені датчик параметрів, цифрова модель ланки першого порядку і цифрова модель ланки другого порядку. На кресленні приведена схема, пояснююча суть корисної моделі. Вона містить датчик параметрів Т1, Т2, Т3 і К моделі (1), цифрову модель ланки першого порядку (2), що складається з послідовно сполучених компаратора (4), множника (5), другий вхід якого сполучений з виходом перетворювача (8) сигналу датчика параметра Т 1, інтегратора (6), вихід якого сполучений з інверсним входом компаратора (4) і з входом компаратора (4) цифрової моделі ланки другого порядку (3), сполученого з множником (5), два інші входи якого сполучено з виходом перетворювача (8) датчика параметра Т 2, вихід множника (5) підключений до входу інтегратора (6), вихід якого сполучений з входом другого інтегратора (6) і входом другого множника (5), на другий вхід якого поданий сигнал датчика параметра Т 3, а його вихід сполучений з входом суматора (7), другий вхід якого сполучений з виходом другого інтегратора (6), а вихід підключений до інверсного входу компаратора (4) ланки (3). Виходом моделі служить множник (5) вихідного сигналу другого інтегратора (6) на коефіцієнт передачі моделі К. Робота моделі відбувається таким чином. Вхідний сигнал х надходить на вхід компаратора (4), що є входом ланки (2), і далі через множник (5), на другий вхід якого поданий зворотний сигнал датчика параметра Т 1 з виходу перетворювача (8), надходить на вхід інтегратора (6), вихід якого сполучений з інверсним входом компаратора (4). Вихід інтегратора (6), що є виходом ланки (2), сполучений з входом компаратора (4), який є входом ланки (3), надходить на вхід множника (5), два інші входи якого сполучено з виходом перетворювача (8) параметра Т2. Вихід множника (5) через інтегратор (6), вихід якого через другий множник (5), другий вхід якого сполучений з виходом датчика параметра Т 3, а вихід підключений до входу суматора (7), надходить на другий інтегратор (6), вихід якого є виходом ланки (3). Вихід другого інтегратора (6) ланки (3) сполучений з другим входом суматора (7), вихід якого сполучений з інверсним входом компаратора (4) ланки (3). Вихід ланки (3) надходить на вхід множника (5), що є виходом моделі Y, другий вхід якого сполучений з датчиком параметра К. Введення датчика параметрів моделі (1), цифрових моделей ланки першого (2) і другого (3) порядку дозволяє отримати вихідний сигнал імітаційної моделі дизеля в тимчасовій області, минувши перетворення зображення вихідного сигналу, одержуваного по операторній передавальній функції (1). Крім того, пропонована модель застосовна для моделювання процесів нелінійних систем при довільній зміні параметрів, що розширює її функціональні можливості. Джерела інформації: 1. Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования: Учеб. пособие для втузов. – М. Машиностроение, 1989. - 752 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Імітаційна модель дизеля, що містить постійні часу Т 1, Т2, Т3 і коефіцієнт передачі К, яка відрізняється тим, що введені датчик (1) параметрів Т1, Т2, Т3 і К, цифрова модель ланки першого порядку (2), що складається з послідовно сполучених компаратора (4), множника (5), другий вхід якого сполучений з виходом перетворювача (8) сигналу датчика параметра Т 1, інтегратора (6), вихід якого сполучений з інверсним входом компаратора (4) і з входом компаратора (4) цифрової моделі ланки другого порядку (3), сполученого з множником (5), два інші входи якого сполучено з виходом перетворювача (8) датчика параметра Т 2, вихід множника (5) підключений до входу інтегратора (6), вихід якого сполучений з входом другого інтегратора 1 UA 83314 U 5 (6) і входом другого множника (5), на другий вхід якого поданий сигнал датчика параметра Т 3, а його вихід сполучений з входом суматора (7), другий вхід якого сполучений з виходом другого інтегратора (6), а вихід підключений до інверсного входу компаратора (4) ланки (3), причому виходом моделі служить множник (5) вихідного сигналу другого інтегратора (6) на коефіцієнт передачі моделі К. Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюDolhin Volodymyr Prohorovych, Sopyn Pavlo Kostiantynovych, Dolhin Ihor Volodymyovych
Автори російськоюДолгин Владимир Прохорович, Сопин Павел Константинович, Долгин Игорь Владимирович
МПК / Мітки
МПК: F02D 41/00
Мітки: дизеля, імітаційна, модель
Код посилання
<a href="https://ua.patents.su/4-83314-imitacijjna-model-dizelya.html" target="_blank" rel="follow" title="База патентів України">Імітаційна модель дизеля</a>
Динамічна модель підвіски
Номер патенту: 100313
Опубліковано: 10.12.2012
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович, Огризков Сергій Виталійович, Мешков Володимир Вікторович
МПК: B60G 17/015, F16F 9/50, G09B 25/00, H03H 17/00
Мітки: підвіски, модель, динамічна
Формула / Реферат:
Динамічна модель підвіски, що має масу m, ресору з жорсткістю с, амортизатор з опором λ, створюючи коефіцієнти аo=c/m і а1=λ/m, яка відрізняється тим, що додатково має датчик параметрів моделі 12, послідовно включені компаратор 1 вхідного сигналу х, інверсний вхід якого сполучений з виходом суматора 10, множник 2, другий вхід якого сполучений з виходом перетворювача 11 параметра а2, інтегратор 3, вихід якого сполучений з входом...
Модель фільтра високих частот
Номер патенту: 16592
Опубліковано: 15.08.2006
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович
МПК: H03H 17/04
Мітки: частот, модель, фільтра, високих
Формула / Реферат:
Модель фільтра високих частот, заснована на моделюванні реакції фільтра з операторною дробово-раціональною передавальною функцією,де - операторна дробово-раціональна передавальна функція, - оператор Лапласа,
Модель коректованого фільтра високих частот
Номер патенту: 21929
Опубліковано: 10.04.2007
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович
МПК: H03J 3/00
Мітки: фільтра, модель, частот, коректованого, високих
Формула / Реферат:
Модель коректованого фільтра високих частот з операторною дробово-раціональною передавальною функцієюде W(s) - операторна дробово-раціональна передавальна функція, s - оператор Лапласа, n - порядок фільтра, f - нижня гранична частота, що містить підсилювач, суматор і елемент затримки, яка відрізняється тим, що введені послідовно включені модулі операційного...
Дискретна модель підвіски
Номер патенту: 25578
Опубліковано: 10.08.2007
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович, Долгін Дмитро Ігорович
МПК: H03H 17/02, G09B 25/00
Мітки: підвіски, дискретна, модель
Формула / Реферат:
Дискретна модель підвіски, що має масу m, ресору з жорсткістю c, амортизацію з опором λ, створюючі коефіцієнти а0=с/m і а1= λ/m, і що містить суматори, віднімач, модулі оцінки і обчислення функцій, яка відрізняється тим, що додатково введені два ідентичні модулі, що складаються з послідовно включених дискретизатора, суматора, вихід якого є виходом модуля, і елемента затримки, вихід якого зв'язаний з другим входом суматора, причому...
Модель ядерної енергетичної установки

Номер патенту: 17931
Опубліковано: 16.10.2006
Автори: Бандура Іван Миколайович, Суховерська Оксана Петрівна, Фірсов Сергій Миколайович
МПК: G06G 7/54
Мітки: ядерної, модель, установки, енергетичної
Формула / Реферат:
Модель ядерної енергетичної установки, що містить перший інтегратор, три суматори, антилогарифмуючий підсилювач, другий інтегратор, блок реєстрації, інерційну ланку, два датчики збурюючих впливів і п'ять інерційних ланцюжків, кожний з яких складається з двох послідовно з'єднаних інерційних ланок, виходи першого і другого датчиків збурюючих впливів підключені до входів першого і другого інтеграторів, вихід першого інтегратора з'єднаний з...
Попередній патент: Газорозрядна електронно-променева гармата
Наступний патент: Пристрій для визначення твердості анізотропних матеріалів
Випадковий патент: Комбайн шахтний прохідницький