Динамічна модель підвіски
Номер патенту: 100313
Опубліковано: 10.12.2012
Автори: Долгін Володимир Прохорович, Огризков Сергій Виталійович, Мешков Володимир Вікторович, Долгін Ігор Володимирович

Формула / Реферат
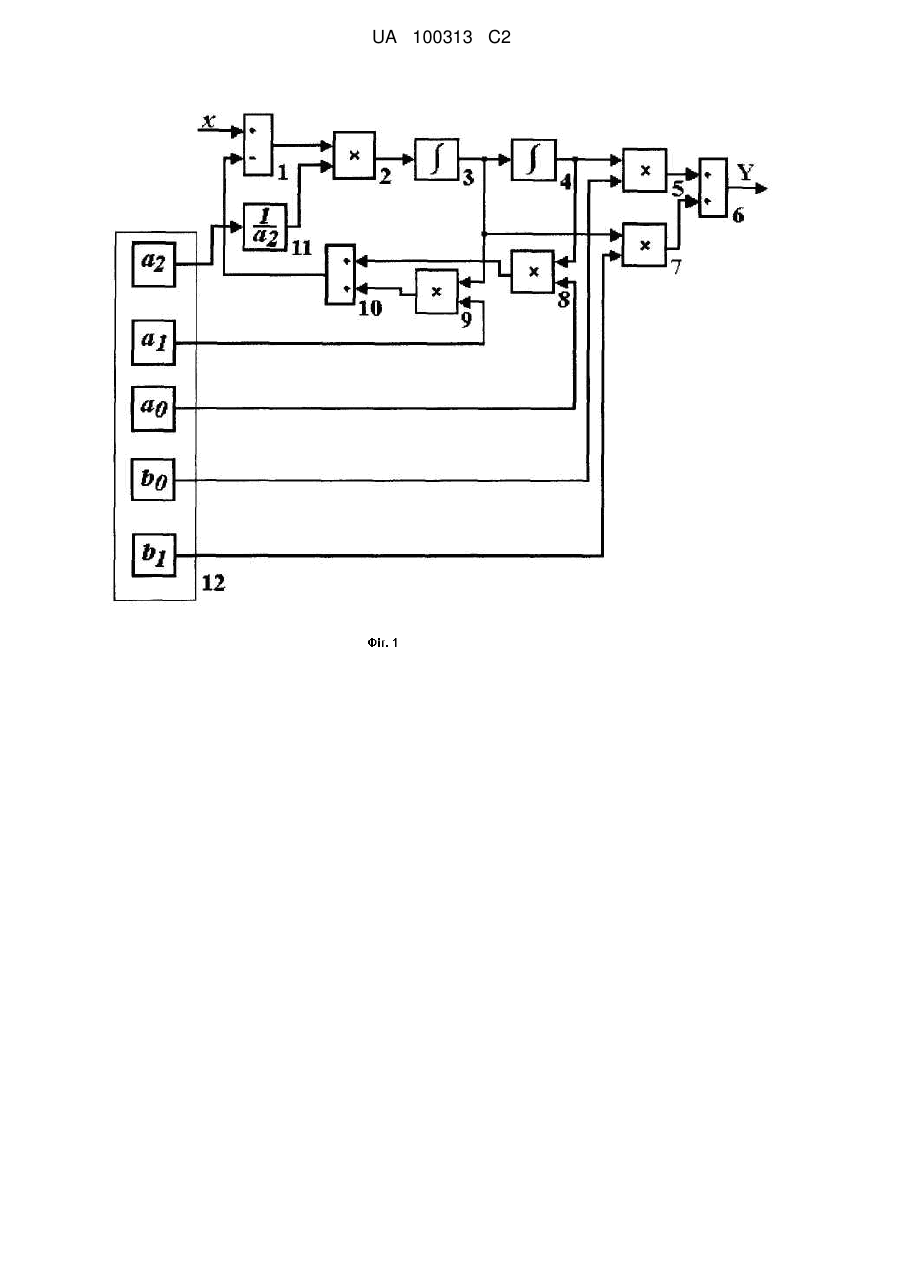
Динамічна модель підвіски, що має масу m, ресору з жорсткістю с, амортизатор з опором λ, створюючи коефіцієнти аo=c/m і а1=λ/m, яка відрізняється тим, що додатково має датчик параметрів моделі 12, послідовно включені компаратор 1 вхідного сигналу х, інверсний вхід якого сполучений з виходом суматора 10, множник 2, другий вхід якого сполучений з виходом перетворювача 11 параметра а2, інтегратор 3, вихід якого сполучений з входом множника 9, другий вхід якого сполучений з виходом датчика параметра а1, інтегратор 4, вихід якого сполучений з входом множника 8, другий вхід якого сполучений з виходом датчика параметра аo, множник 5, другий вхід якого сполучений з виходом датчика параметра bo, суматор 6, другий вхід якого сполучений з виходом множника 7, вихід Y якого є виходом моделі, а входи множника 7 сполучені з виходами інтегратора 3 і датчика параметра b1, при цьому виходи множників 8 і 9 підключені до входів суматора 10.
Текст
Реферат: Динамічна модель підвіски має масу m, ресору з жорсткістю с, амортизатор з опором λ, створюючи коефіцієнти а0=c/m і а1=λ/m. Додатково модель має датчик параметрів моделі 12, послідовно включені компаратор 1 вхідного сигналу х, інверсний вхід якого сполучений з виходом суматора 10, множник 2, другий вхід якого сполучений з виходом перетворювача 11 параметра а2, інтегратор 3, вихід якого сполучений з входом множника 9, другий вхід якого сполучений з виходом датчика параметра а1, інтегратор 4, вихід якого сполучений з входом множника 8, другий вхід якого сполучений з виходом датчика параметра а 0, множник 5, другий вхід якого сполучений з виходом датчика параметра b0, суматор 6, другий вхід якого сполучений з виходом множника 7, вихід Y якого є виходом моделі. Входи множника 7 сполучені з виходами інтегратора 3 і датчика параметра b1. Виходи множників 8 і 9 підключені до входів суматора 10. UA 100313 C2 (12) UA 100313 C2 UA 100313 C2 5 10 Винахід належить до моделювання систем демпфування, зокрема механічних систем з гасінням коливань в підвісках автомобільного, залізничного, авіаційного і інших видів транспорту і може бути використаний для моделювання динамічних процесів технічних систем. Відома модель підвіски пат. JP2002002531 ІРС B60G17/015 (Suspension device for vehicle, 2002-01-09), що містить масу, жорсткість ресор, опір амортизатора. Вона має структурний опис, але не дозволяє безпосередньо отримати сигнал реакції. Як прототип вибрана модель [1], що містить масу, жорсткість ресор, опір амортизаторів, призначена для обчислення реакції. Вона не дозволяє проводити оцінку реакції при зміні її параметрів, що звужує її функціональні можливості. В основу винаходу поставлена задача розширення функціональних можливостей по опису в дискретній формі реакції підвіски з операторною дробово-раціональною передавальною функцією вигляду W p 15 20 25 30 35 40 45 50 55 b0 b1p a0 a1p a2p2 , де W(p) - операторна дробово-раціональна передавальна функція, р - оператор, bo=ao=1, b1 =a1=λ/с, а2=m/с, с - жорсткість ресори, λ - опір амортизатора, m - приведена до одного колеса маса. Коефіцієнти bo, b1, ao, і a2, операторної дробово-раціональної передавальної функції (1) виражені через технічні параметри підвіски, що забезпечує універсальність моделі, дозволяючи вирішувати поставлену задачу в широкому діапазоні можливих змін її параметрів. Суть пропонованого винаходу виражається сукупністю наступних істотних відмітних ознак: введений датчик параметрів моделі, послідовно включені компаратор вхідного сигналу, інверсний вхід якого сполучений з виходом суматора, множник, другий вхід якого сполучений з виходом перетворювача параметра а2, інтегратор, вихід якого сполучений з входом другого множника, другий вхід якого сполучений з виходом датчика параметра а 1, другий інтегратор, вихід якого сполучений з входом третього множника, другий вхід якого сполучений з виходом датчика параметра ao, четвертий множник, другий вхід якого сполучений з виходом датчика параметра bo, другий суматор, другий вхід якого сполучений з виходом п'ятого множника, входи якого сполучені з виходами інтегратора і датчика параметра b1, виходи другого і третього множників сполучені з входами суматора, а виходом моделі служить вихід другого суматора. На фіг. 1 приведена схема, пояснююча суть пропонованої моделі. Вона містить датчик параметрів моделі 12, послідовно включені компаратор 1 вхідного сигналу х, інверсний вхід якого сполучений з виходом суматора 10, множник 2, другий вхід якого сполучений з виходом перетворювача 11 параметра а2, інтегратор 3, вихід якого сполучений з входом множника 9, другий вхід якого сполучений з виходом датчика параметра а1, інтегратор 4, вихід якого сполучений з входом множника 8, другий вхід якого сполучений з виходом датчика параметра ао, множник 5, другий вхід якого сполучений з виходом датчика параметра bo, суматор 6, другий вхід якого сполучений з виходом множника 7, входи якого сполучені з виходами інтегратора 3 і датчика параметра b1, виходи множників 8 і 9 сполучені з входами суматора 10, а виходом моделі служить вихід Y суматора 6. Робота моделі відбувається таким чином. Вхідний сигнал х, що імітує профіль дорожнього покриття, надходить на вхід компаратора 1, де порівнюється з сигналом зворотного зв'язку, формованою сумою реакцій амортизатора (інтегратор 3) і ресори (інтегратор 4). Облік впливу маси здійснюється функціональним перетворювачем 11. Вплив параметрів моделі на властивості підвіски виявляється в змінах її реакції на зовнішню дію х. На фіг. 2 приведені графіки реакції на випадковий сигнал (фіг. 2а) і гармонійну дію (фіг. 2б) при номінальних параметрах підвіски (крива 1), при збільшенні параметра а 1, (крива 2), при зменшенні параметра а1, (крива 3), при збільшенні параметра а2 (крива 4), при зменшенні параметра а2 (крива 5). Запропонована модель дозволяє проводити аналіз роботи підвіски при довільному характері вхідної дії і змінах її параметрів, що розширює її функціональні можливості. Бібліографічний список: 1. Akopjan R., Lejda До. Some problems automotive transport facilities. / R. Akopjan. - Lvov: "BMC", 2006. – 579р. ФОРМУЛА ВИНАХОДУ Динамічна модель підвіски, що має масу m, ресору з жорсткістю с, амортизатор з опором λ, створюючи коефіцієнти а0=c/m і а1=λ/m, яка відрізняється тим, що додатково має датчик параметрів моделі 12, послідовно включені компаратор 1 вхідного сигналу х, інверсний вхід 1 UA 100313 C2 5 якого сполучений з виходом суматора 10, множник 2, другий вхід якого сполучений з виходом перетворювача 11 параметра а2, інтегратор 3, вихід якого сполучений з входом множника 9, другий вхід якого сполучений з виходом датчика параметра а1, інтегратор 4, вихід якого сполучений з входом множника 8, другий вхід якого сполучений з виходом датчика параметра а0, множник 5, другий вхід якого сполучений з виходом датчика параметра b0, суматор 6, другий вхід якого сполучений з виходом множника 7, вихід Y якого є виходом моделі, а входи множника 7 сполучені з виходами інтегратора 3 і датчика параметра b1, при цьому виходи множників 8 і 9 підключені до входів суматора 10. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюDynamic model of suspension
Автори англійськоюDolhin Volodymyr Prohorovych, Meshkov Volodymyr Viktorovych, Dolhin Ihor Volodymyovych, Ohryzkov Serhii Vitaliiovych
Назва патенту російськоюДинамическая модель подвески
Автори російськоюДолгин Владимир Прохорович, Мешков Владимир Викторович, Долгин Игорь Владимирович, Огрызков Сергей Витальевич
МПК / Мітки
МПК: H03H 17/00, G09B 25/00, B60G 17/015, F16F 9/50
Мітки: модель, підвіски, динамічна
Код посилання
<a href="https://ua.patents.su/4-100313-dinamichna-model-pidviski.html" target="_blank" rel="follow" title="База патентів України">Динамічна модель підвіски</a>
Дискретна модель підвіски
Номер патенту: 25578
Опубліковано: 10.08.2007
Автори: Долгін Дмитро Ігорович, Долгін Володимир Прохорович, Долгін Ігор Володимирович
МПК: H03H 17/02, G09B 25/00
Мітки: підвіски, модель, дискретна
Формула / Реферат:
Дискретна модель підвіски, що має масу m, ресору з жорсткістю c, амортизацію з опором λ, створюючі коефіцієнти а0=с/m і а1= λ/m, і що містить суматори, віднімач, модулі оцінки і обчислення функцій, яка відрізняється тим, що додатково введені два ідентичні модулі, що складаються з послідовно включених дискретизатора, суматора, вихід якого є виходом модуля, і елемента затримки, вихід якого зв'язаний з другим входом суматора, причому...
Модель коректованого фільтра високих частот
Номер патенту: 21929
Опубліковано: 10.04.2007
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03J 3/00
Мітки: високих, фільтра, модель, частот, коректованого
Формула / Реферат:
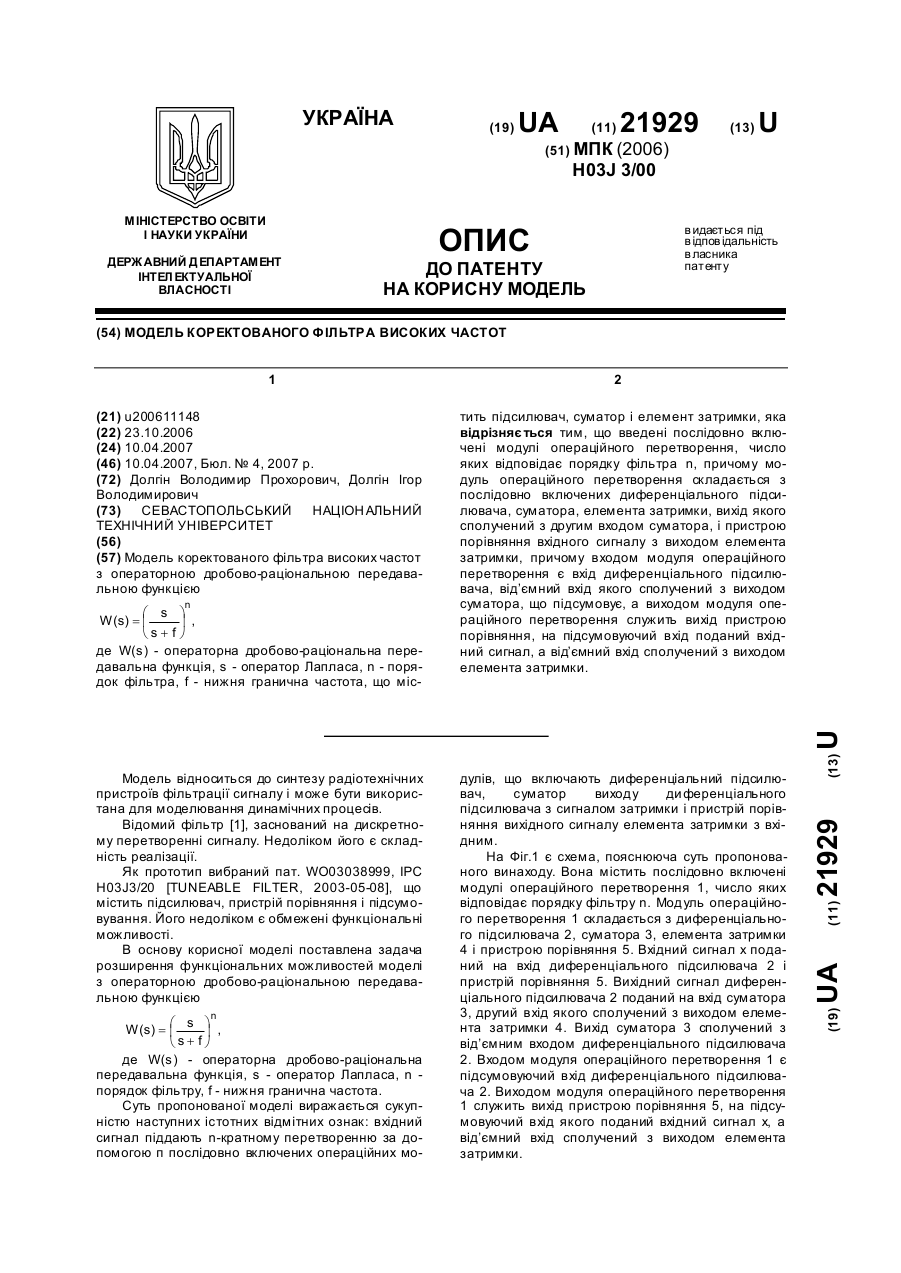
Модель коректованого фільтра високих частот з операторною дробово-раціональною передавальною функцієюде W(s) - операторна дробово-раціональна передавальна функція, s - оператор Лапласа, n - порядок фільтра, f - нижня гранична частота, що містить підсилювач, суматор і елемент затримки, яка відрізняється тим, що введені послідовно включені модулі операційного...
Модель ядерної енергетичної установки

Номер патенту: 17931
Опубліковано: 16.10.2006
Автори: Суховерська Оксана Петрівна, Бандура Іван Миколайович, Фірсов Сергій Миколайович
МПК: G06G 7/54
Мітки: енергетичної, модель, ядерної, установки
Формула / Реферат:
Модель ядерної енергетичної установки, що містить перший інтегратор, три суматори, антилогарифмуючий підсилювач, другий інтегратор, блок реєстрації, інерційну ланку, два датчики збурюючих впливів і п'ять інерційних ланцюжків, кожний з яких складається з двох послідовно з'єднаних інерційних ланок, виходи першого і другого датчиків збурюючих впливів підключені до входів першого і другого інтеграторів, вихід першого інтегратора з'єднаний з...
Модель настроюваного фільтра високих частот
Номер патенту: 18840
Опубліковано: 15.11.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03J 3/00
Мітки: високих, модель, частот, настроюваного, фільтра
Формула / Реферат:
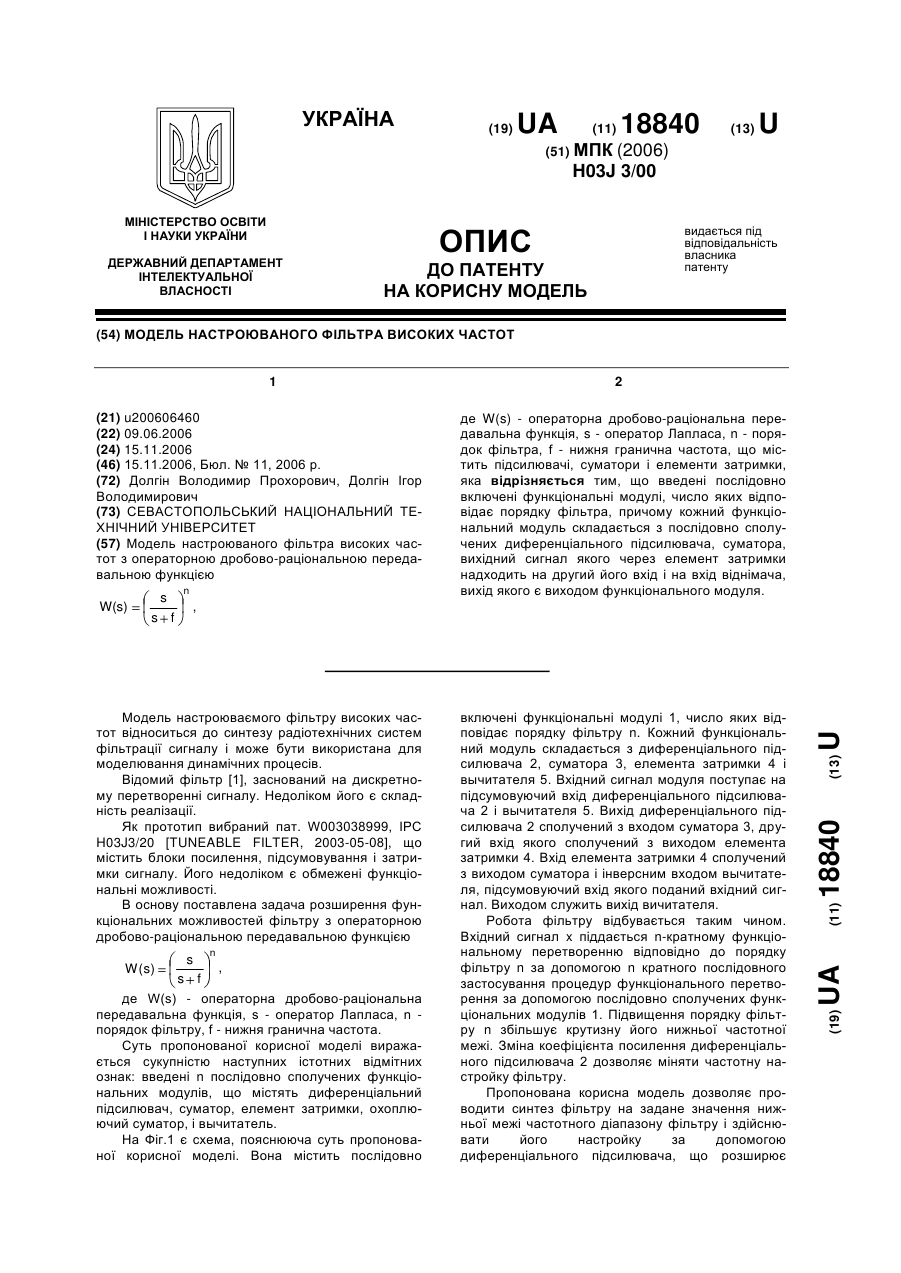
Модель настроюваного фільтра високих частот з операторною дробово-раціональною передавальною функцією,де W(s) - операторна дробово-раціональна передавальна функція, s - оператор Лапласа, n - порядок фільтра, f - нижня гранична частота, що містить підсилювачі, суматори і елементи затримки, яка відрізняється тим, що введені послідовно включені функціональні...
Модель керованого фільтра високих частот
Номер патенту: 19171
Опубліковано: 15.12.2006
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович
МПК: H03J 3/00
Мітки: керованого, високих, частот, фільтра, модель
Формула / Реферат:
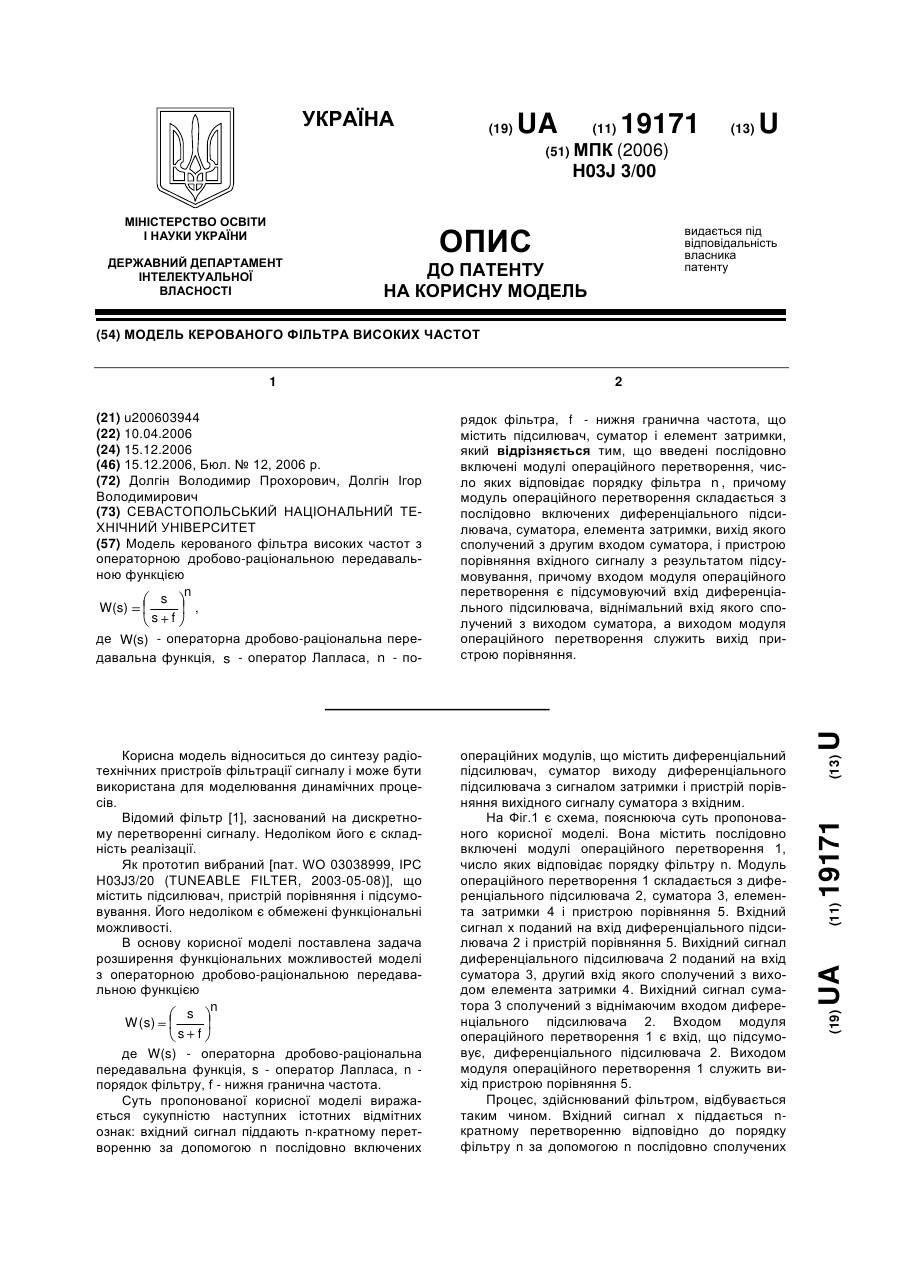
Модель керованого фільтра високих частот з операторною дробово-раціональною передавальною функцією,де - операторна дробово-раціональна передавальна функція, - оператор Лапласа,
Попередній патент: Плавуча вітроустановка для офшорних вітроелектростанцій
Наступний патент: Нарізне з’єднання для стальних труб
Випадковий патент: Спосіб прогнозування інфекційних ускладнень у хворих з відмороженням