Робочий орган роторного екскаватора
Номер патенту: 8338
Опубліковано: 15.08.2005
Автори: Литвинов Володимир Георгійович, Литвинова Наталія Федорівна

Формула / Реферат
1. Робочий орган роторного екскаватора, що складається з двох дисків, розташованих на стрілі під кутом один до одного і до подовжньої осі стріли, споряджених ковшами, причому одна половина ковшів закріплена на одному диску під кутом до нього, утворюючи один півротор, а друга половина ковшів закріплена на другому диску під кутом до нього, утворюючи другий півротор, таким чином, що в зоні зачерпування ковші обох дисків зближені, а в зоні розвантаження вони віддалені один від одного, який відрізняється тим, що всі ковші обох півроторів оснащені амортизуючими елементами.
2. Робочий орган роторного екскаватора по п. 1, який відрізняється тим, що приводи оснащені просковзуючими елементами, наприклад клинопасовими передачами.
3. Робочий орган роторного екскаватора по п. 1, який відрізняється тим, що диски обох півроторів розміщені на такій відстані від осі ротора, що в зоні зачерпування ковші обох півроторів розміщені один за одним, частково заходячи один за одний.
Текст
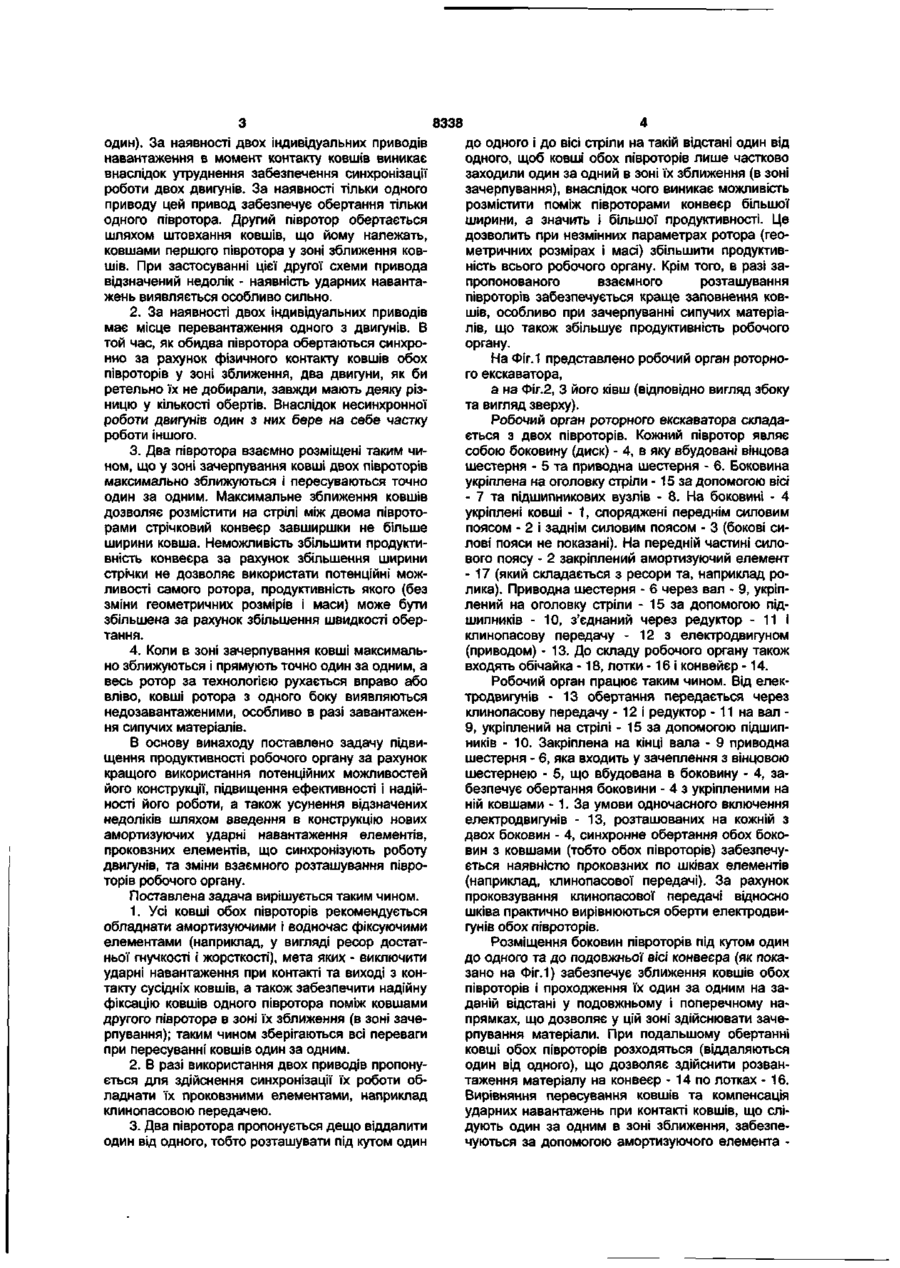
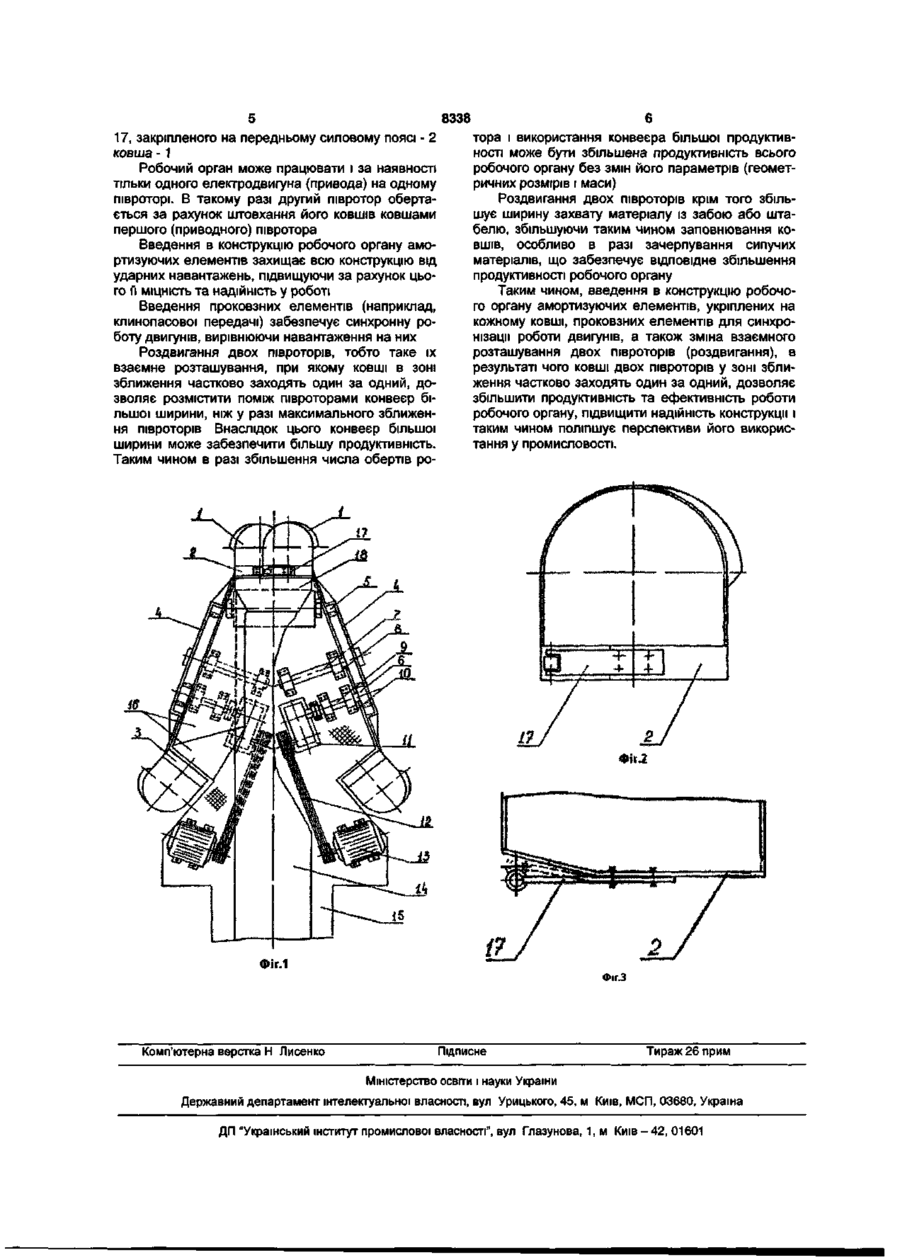
1. Робочий орган роторного екскаватора, що складається з двох дисків, розташованих на стрілі під кутом один до одного і до подовжньої осі стріли, споряджених ковшами, причому одна половина ковшів закріплена на одному диску під кутом до нього, утворюючи один півротор, а друга половина ковшів закріплена на другому диску під кутом до нього, утворюючи другий півротор, таким чином, що в зоні зачерпування ковші обох дисків зближені, а в зоні розвантаження вони віддалені один від одного, який відрізняється тим, що всі ковші обох півроторів оснащені амортизуючими елементами. 2. Робочий орган роторного екскаватора по п.1, який відрізняється тим, що приводи оснащені просковзуючими елементами, наприклад клинопасовими передачами. 3. Робочий орган роторного екскаватора по п.1, який відрізняється тим, що диски обох півроторів розміщені на такій відстані від осі ротора, що в зоні зачерпування ковші обох півроторів розміщені один за одним, частково заходячи один за одний. Робочий орган роторного екскаватора призначений для виймання із забою матеріалів малої та середньої міцності, або навантаження зі штабелю сипучих матеріалів і може бути особливо ефективно використаний у важких (обмежених) умовах, наприклад, у випадку проведення траншей або при вийманні ґрунтів з-під будівель, що реконструюються. Робочий орган роторного екскаватора складається з двох дисків, розташованих на стрілі під кутом один до одного і до подовжньої вісі стріли, та ковшів. При цьому одна половина ковшів закріплена на одному диску під кутом до нього (створює один півротор), а друга половина ковшів закріплена на другому диску під кутом до нього (створює другий півротор). Вісь ротора співпадає з віссю стріли. Обидва півротори взаємно розташовані таким чином, що коли ротор обертається, ковші обох півроторів в зоні зачерпування зближуються, рухаються один за одним, частково заходячи один за одний. При подальшому обертанні ротора ковші обох півроторів розходяться, здійснюючи розвантаження матеріалу на стрічку конвейєра, розміщеного на стрілі. Ковші кожного півротора обладнані амортизуючими і водночас фіксуючими елементами, які мають достатню гнучкість та жорсткість. Кожний півротор може мати індивідуальний привод. Але може бути лише один привод на одному з півроторів. В такому разі обертання ковшів другого півротора здійснюється за рахунок штовхання їх ковшами першого півротора. За наявності двох індивідуальних приводів в конструкції передбачено елемент проковзування (наприклад, клинопасова передача), що синхронізує роботу обох двигунів. Відомий робочий орган роторного екскаватора, що містить стрілу, ротор з ковшами і привод, який відрізняється тим, що ротор зроблений з встановленими під кутом один до одного і до подовжньої вісі стріли дисками, на кожному з яких закріплені під кутом до нього ковші [авторське свідоцтво №270604, автор Литвинов В.Г. з пріоритетом від 31.Х.1968р., опубліковано 08.V.1970p. Бюлетень №16]. Після лабораторних випробувань виявилось, що конструктивне рішення цього робочого органу має ряд недоліків, які утруднюють його використання у промисловості. А саме: 1. Коли ротор працює, в момент зближення ковшів двох півроторів у зоні зачерпування має місце контакт ковшів, що йдуть один за одним, що супроводжується ударними навантаженнями, які негативно впливають на міцність усієї конструкції. Причиною виникнення ударних навантажень є таке. Кожний півротор може мати свій індивідуальний привід, але привід може бути і спільним (тільки 00 со со 00 О> 8338 один). За наявності двох індивідуальних приводів навантаження в момент контакту ковшів виникає внаслідок утруднення забезпечення синхронізації роботи двох двигунів. За наявності тільки одного приводу цей привод забезпечує обертання тільки одного півротора. Другий півротор обертається шляхом штовхання ковшів, що йому належать, ковшами першого півротора у зоні зближення ковшів. При застосуванні цієї другої схеми привода відзначений недолік - наявність ударних навантажень виявляється особливо сильно. 2. За наявності двох індивідуальних приводів має місце перевантаження одного з двигунів. В той час, як обидва півротора обертаються синхронно за рахунок фізичного контакту ковшів обох півроторів у зоні зближення, два двигуни, як би ретельно їх не добирали, завжди мають деяку різницю у кількості обертів. Внаслідок несинхронно!' роботи двигунів один з них бере на себе частку роботи іншого. 3. Два півротора взаємно розміщені таким чином, що у зоні зачерпування ковші двох півроторів максимально зближуються і пересуваються точно один за одним. Максимальне зближення ковшів дозволяє розмістити на стрілі між двома півроторами стрічковий конвеєр завширшки не більше ширини ковша. Неможливість збільшити продуктивність конвеєра за рахунок збільшення ширини стрічки не дозволяє використати потенційні можливості самого ротора, продуктивність якого (без зміни геометричних розмірів і маси) може бути збільшена за рахунок збільшення швидкості обертання. 4. Коли в зоні зачерпування ковші максимально зближуються і прямують точно один за одним, а весь ротор за технологією рухається вправо або вліво, ковші ротора з одного боку виявляються недозавантаженими, особливо в разі завантаження сипучих матеріалів. В основу винаходу поставлено задачу підвищення продуктивності робочого органу за рахунок кращого використання потенційних можливостей його конструкції, підвищення ефективності і надійності його роботи, а також усунення відзначених недоліків шляхом введення в конструкцію нових амортизуючих ударні навантаження елементів, проковзних елементів, що синхронізують роботу двигунів, та зміни взаємного розташування півроторів робочого органу. Поставлена задача вирішується таким чином. 1. Усі ковші обох півроторів рекомендується обладнати амортизуючими і водночас фіксуючими елементами (наприклад, у вигляді ресор достатньої гнучкості і жорсткості), мета яких - виключити ударні навантаження при контакті та виході з контакту сусідніх ковшів, а також забезпечити надійну фіксацію ковшів одного півротора поміж ковшами другого півротора в зоні їх зближення (в зоні зачерпування); таким чином зберігаються всі переваги при пересуванні ковшів один за одним. 2. В разі використання двох приводів пропонується для здійснення синхронізації їх роботи обладнати їх проковзними елементами, наприклад клинопасовою передачею. 3. Два півротора пропонується дещо віддалити один від одного, тобто розташувати під кутом один до одного і до вісі стріли на такій відстані один від одного, щоб ковші обох півроторів лише частково заходили один за одний в зоні їх зближення (в зоні зачерпування), внаслідок чого виникає можливість розмістити поміж півроторами конвеєр більшої ширини, а значить і більшої продуктивності. Це дозволить при незмінних параметрах ротора (геометричних розмірах і масі) збільшити продуктивність всього робочого органу. Крім того, в разі запропонованого взаємного розташування півроторів забезпечується краще заповнення ковшів, особливо при зачерпуванні сипучих матеріалів, що також збільшує продуктивність робочого органу. На Фіг.1 представлено робочий орган роторного екскаватора, а на Фіг.2, 3 його ківш (відповідно вигляд збоку та вигляд зверху). Робочий орган роторного екскаватора складається з двох півроторів. Кожний півротор являє собою боковину (диск) - 4, в яку вбудовані вінцова шестерня - 5 та приводна шестерня - 6. Боковина укріплена на оголовку стріли - 15 за допомогою вісі - 7 та підшипникових вузлів - 8. На боковині - 4 укріплені ковші - 1, споряджені переднім силовим поясом - 2 і заднім силовим поясом - 3 (бокові силові пояси не показані). На передній частині силового поясу - 2 закріплений амортизуючий елемент - 17 (який складається з ресори та, наприклад ролика). Приводна шестерня - 6 через вал - 9, укріплений на оголовку стріли - 15 за допомогою підшипників - 10, з'єднаний через редуктор - 11 і клинопасову передачу - 12 з електродвигуном (приводом) - 13. До складу робочого органу також входять обічайка -18, лотки -16 і конвейєр -14. Робочий орган працює таким чином. Від електродвигунів - 13 обертання передається через клинопасову передачу - 12 і редуктор -11 на вал 9, укріплений на стрілі - 15 за допомогою підшипників - 10. Закріплена на кінці вала - 9 приводна шестерня - 6, яка входить у зачеплення з вінцовою шестернею - 5, що вбудована в боковину - 4, забезпечує обертання боковини - 4 з укріпленими на ній ковшами - 1. За умови одночасного включення електродвигунів - 13, розташованих на кожній з двох боковин - 4, синхронне обертання обох боковин з ковшами (тобто обох півроторів) забезпечується наявністю проковзних по шківах елементів (наприклад, клинопасової передачі). За рахунок проковзування клинопасової передачі відносно шківа практично вирівнюються оберти електродвигунів обох півроторів. Розміщення боковин півроторів під кутом один до одного та до подовжньої вісі конвеєра (як показано на Фіг.1) забезпечує зближення ковшів обох півроторів і проходження їх один за одним на заданій відстані у подовжньому і поперечному напрямках,що дозволяє у цій зоні здійснювати зачерпування матеріали. При подальшому обертанні ковші обох півроторів розходяться (віддаляються один від одного), що дозволяє здійснити розвантаження матеріалу на конвеєр - 14 по лотках - 16. Вирівняння пересування ковшів та компенсація ударних навантажень при контакті ковшів, що слідують один за одним в зоні зближення, забезпечуються за допомогою амортизуючого елемента 8338 17, закріпленого на передньому силовому поясі - 2 тора і використання конвеєра більшої продуктивковша -1 ності може бути збільшена продуктивність всього робочого органу без змін його параметрів (геометРобочий орган може працювати і за наявності ричних розмірів і маси) тільки одного електродвигуна (привода) на одному півроторі. В такому разі другий півротор обертаРоздвигання двох півроторів крім того збільється за рахунок штовхання його ковшів ковшами шує ширину захвату матеріалу із забою або штапершого (приводного) півротора белю, збільшуючи таким чином заповнювання ковшів, особливо в разі зачерпування сипучих Введення в конструкцію робочого органу амоматеріалів, що забезпечує відповідне збільшення ртизуючих елементів захищає всю конструкцію від продуктивності робочого органу ударних навантажень, підвищуючи за рахунок цього п МІЦНІСТЬ та надійність у роботі Таким чином, введення в конструкцію робочого органу амортизуючих елементів, укріплених на Введення проковзних елементів (наприклад, кожному ковші, проковзних елементів для синхроклинопасової передачі) забезпечує синхронну ронізації роботи двигунів, а також зміна взаємного боту двигунів, вирівнюючи навантаження на них розташування двох півроторів (роздвигання), в Роздвигання двох півроторів, тобто таке їх результаті чого ковші двох півроторів у зоні збливзаємне розташування, при якому ковші в зоні ження частково заходять один за одний, дозволяє зближення частково заходять один за одний, дозбільшити продуктивність та ефективність роботи зволяє розмістити поміж півроторами конвеєр біробочого органу, підвищити надійність конструкції і льшої ширини, ніж у разі максимального зближентаким чином поліпшує перспективи його викорисня півроторів Внаслідок цього конвеєр більшої тання у промисловості. ширини може забезпечити більшу продуктивність. Таким чином в разі збільшення числа обертів ро .Ж Фік? У*» І • -І • ФІГ.1 Фіг.З Комп'ютерна верстка Н Лисенко Підписне Тираж 26 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м К и ї в - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюExecutive device of rotor excavator
Автори англійськоюLytvynov Volodymyr Heorhiiovych, Lytvynova Natalia Fedorivna
Назва патенту російськоюРабочий орган роторного экскаватора
Автори російськоюЛитвинов Владимир Георгиевич, Литвинова Наталия Федоровна
МПК / Мітки
Мітки: роторного, екскаватора, робочий, орган
Код посилання
<a href="https://ua.patents.su/4-8338-robochijj-organ-rotornogo-ekskavatora.html" target="_blank" rel="follow" title="База патентів України">Робочий орган роторного екскаватора</a>
Робочий орган роторного екскаватора
Номер патенту: 36406
Опубліковано: 16.04.2001
Автори: Долгов Володимир Іванович, Чуйко Віктор Андрійович
МПК: E02F 3/00
Мітки: роторного, орган, екскаватора, робочий
Текст:
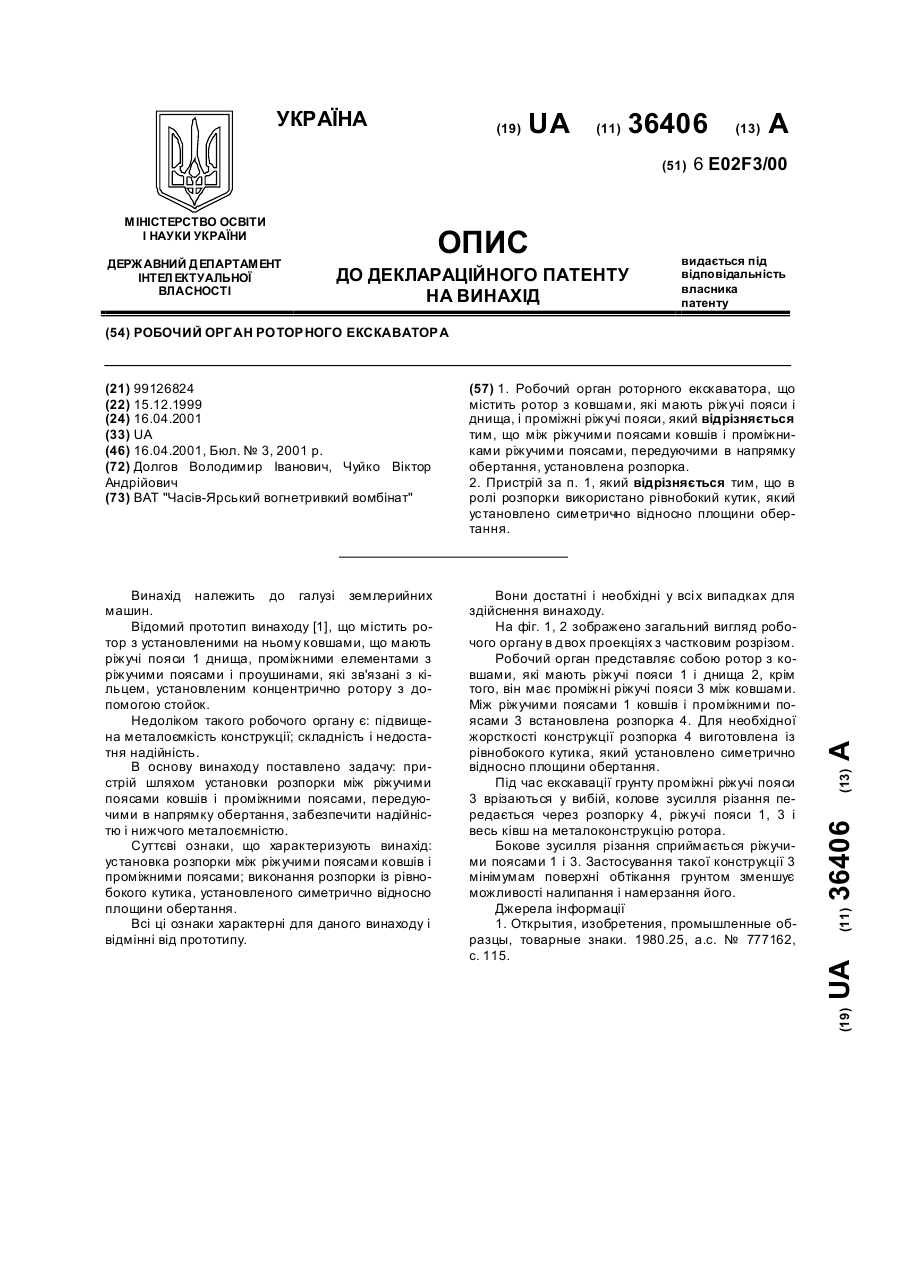
...симетрично відносно площини обертання. (19) (21) 99126824 (22) 15.12.1999 (24) 16.04.2001 (33) UA (46) 16.04.2001, Бюл. № 3, 2001 р. (72) Долгов Володимир Іванович, Чуйко Віктор Андрійович (73) ВАТ ''Часів-Ярський вогнетривкий вомбінат'' 36406 Фіг. 1 Фіг. 2 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044)...
Робочий орган роторного екскаватора
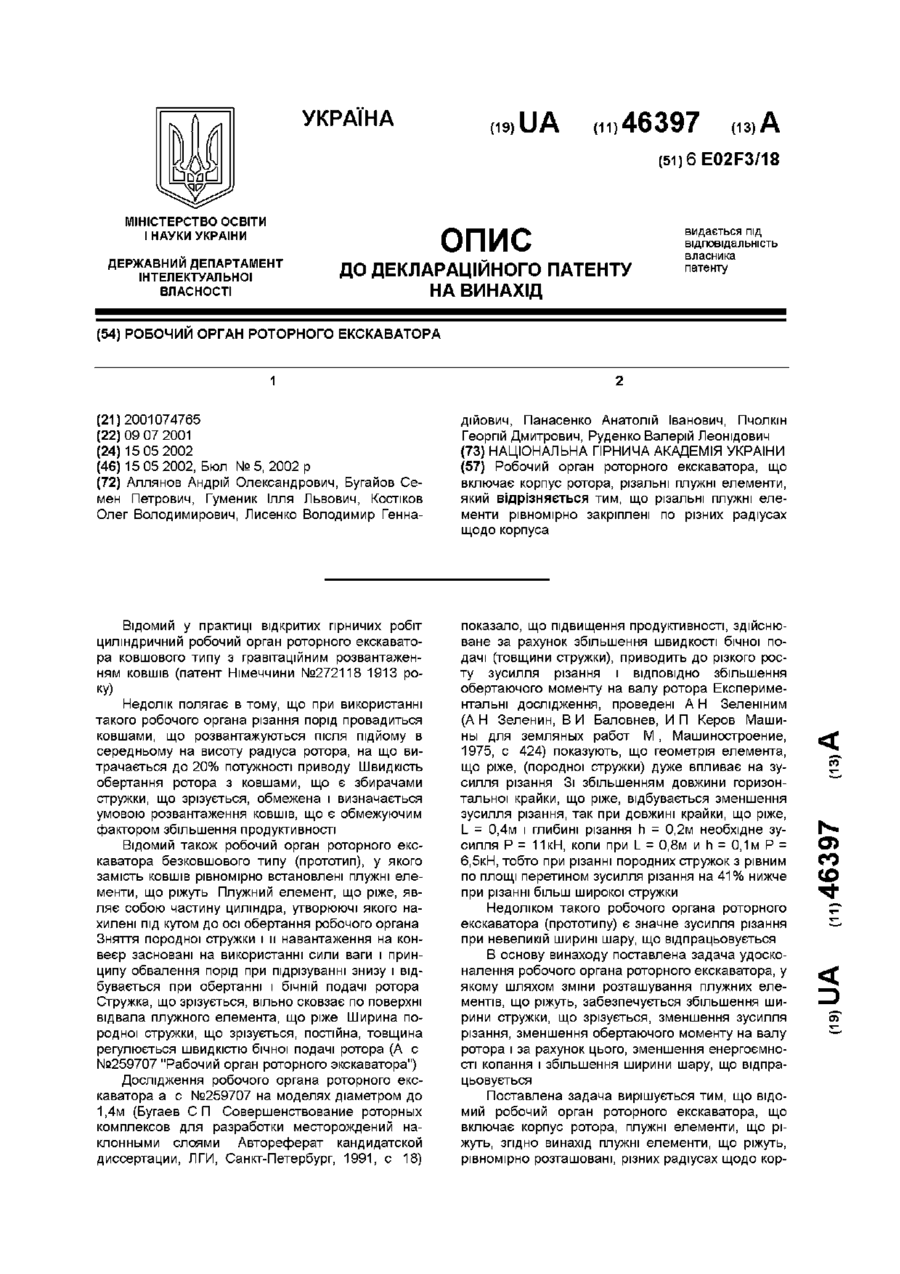
Номер патенту: 46397
Опубліковано: 15.05.2002
Автори: Лисенко Володимир Геннадійович, Бугайов Семен Петрович, Костіков Олег Володимирович, Руденко Валерій Леонідович, Панасенко Анатолій Іванович, Аллянов Андрій Олександрович, Пчьолкін Георгій Дмитрович, Гуменик Ілля Львович
МПК: E02F 3/18
Мітки: екскаватора, робочий, орган, роторного
Формула / Реферат:
Робочий орган роторного екскаватора, що включає корпус ротора, різальні плужні елементи, який відрізняється тим, що різальні плужні елементи рівномірно закріплені по різних радіусах щодо корпуса.
Робочий орган фрезерно-роторного екскаватора
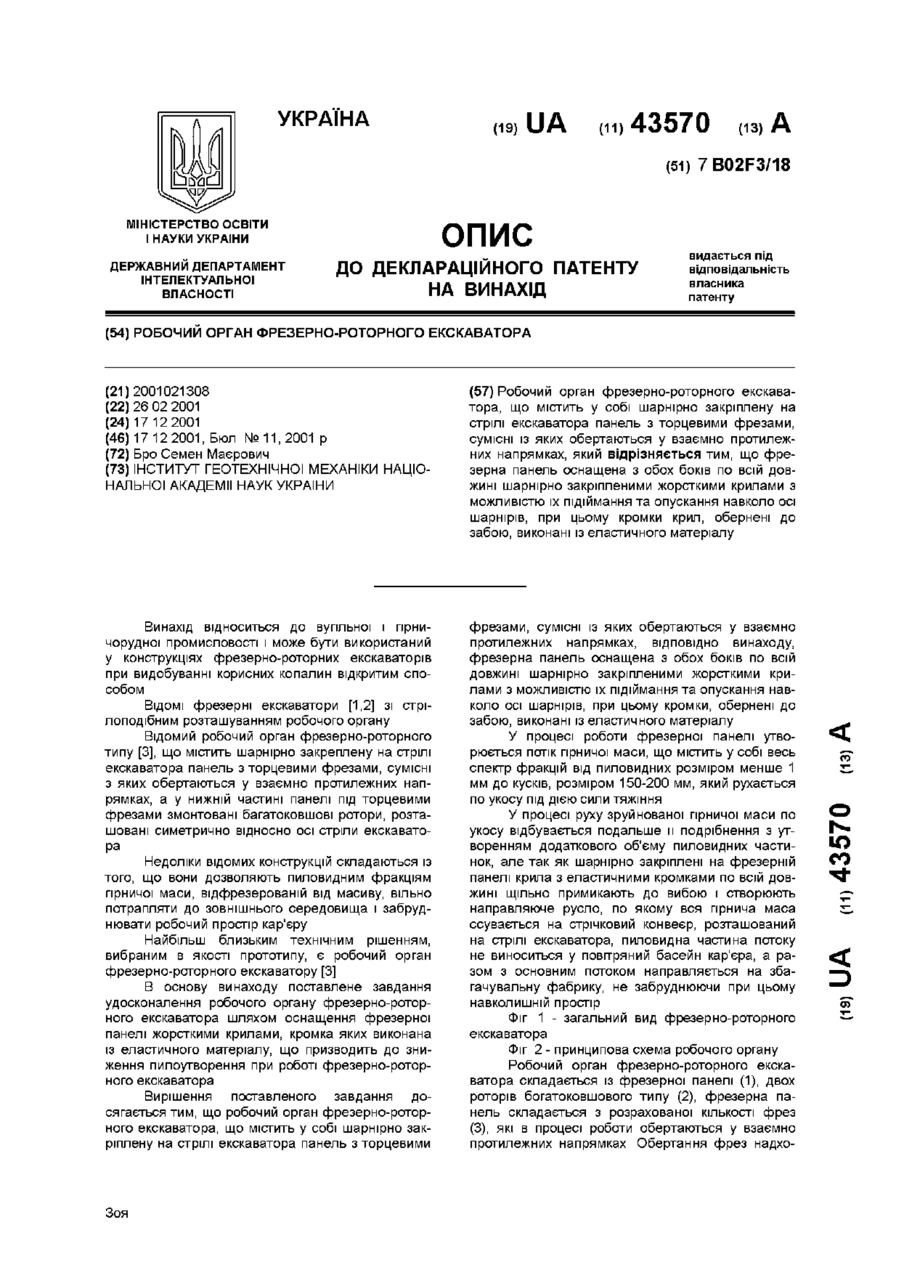
Номер патенту: 43570
Опубліковано: 17.12.2001
Автор: Бро Семен Маєрович
МПК: E02F 3/18
Мітки: екскаватора, орган, фрезерно-роторного, робочий
Формула / Реферат:
Робочий орган фрезерно - роторного екскаватора, що містить у собі шарнірно закріплену на стрілі екскаватора панель з торцевими фрезами, сумісні із яких обертаються у взаємно протилежних напрямках, який відрізняється тим, що фрезерна панель оснащена з обох боків по всій довжині шарнірно закріпленими жорсткими крилами з можливістю їх підіймання та опускання навколо осі шарнірів, при цьому кромки крил, обернені до забою, виконані із еластичного...
Робочий орган роторного екскаватора
Номер патенту: 4486
Опубліковано: 27.12.1994
Автори: Бугайов Семен Петрович, Бугайов Сергій Семенович
МПК: E02F 3/18
Мітки: орган, роторного, робочий, екскаватора
Формула / Реферат:
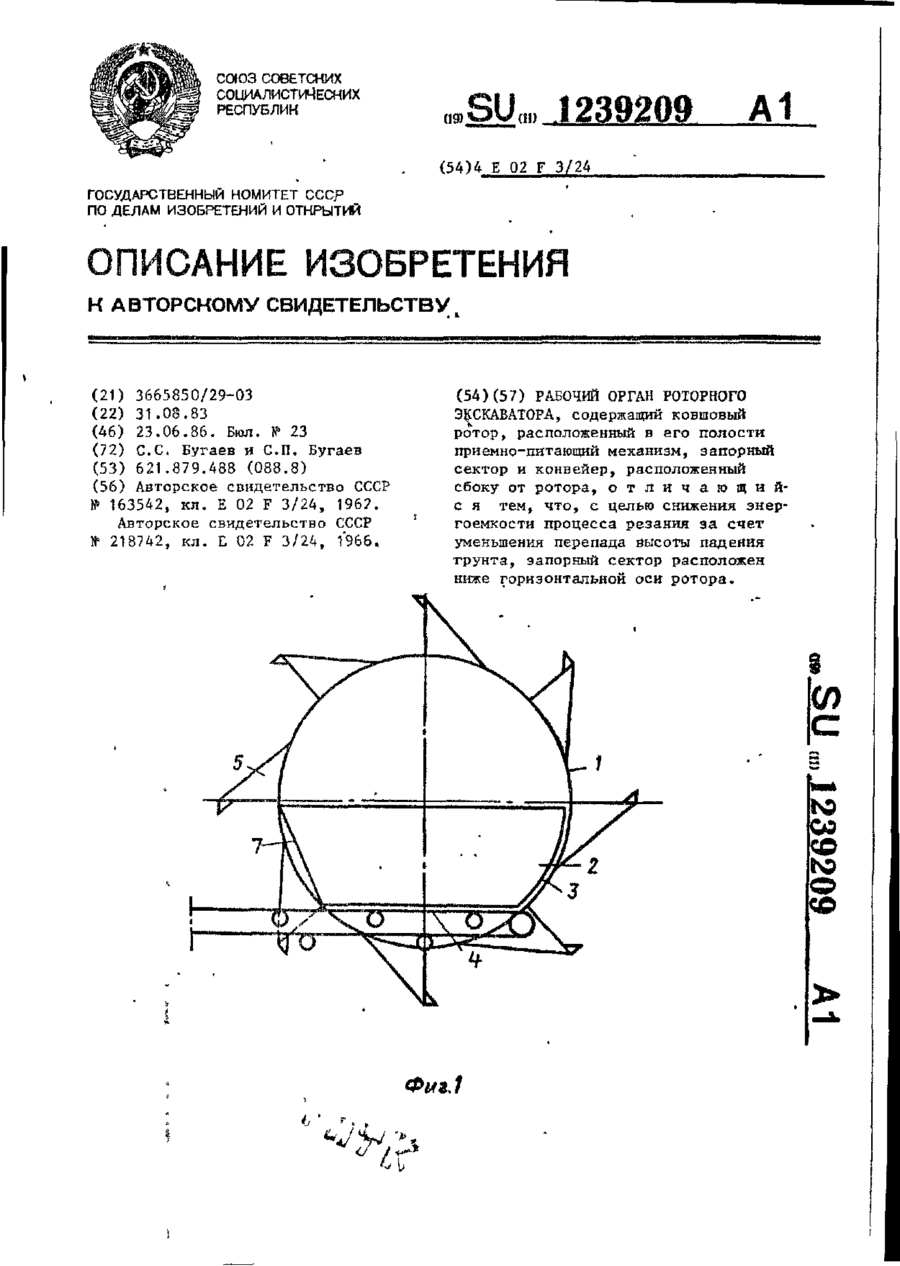
Рабочий орган роторного экскаватора, содержащий ковшовый ротор, расположенный в его полости приемно-питающий механизм, запорный сектор и конвейер, расположенный сбоку от ротора, отличающийся тем, что, с целью снижения энергоемкости процесса резания за счет уменьшения перепада высоты падения грунта, запорный сектор расположен ниже горизонтальной оси ротора.
Робочий орган роторного екскаватора
Номер патенту: 4485
Опубліковано: 27.12.1994
Автори: Бугайов Семен Петрович, Бугайов Сергій Семенович
МПК: E02F 3/18
Мітки: робочий, роторного, екскаватора, орган
Формула / Реферат:
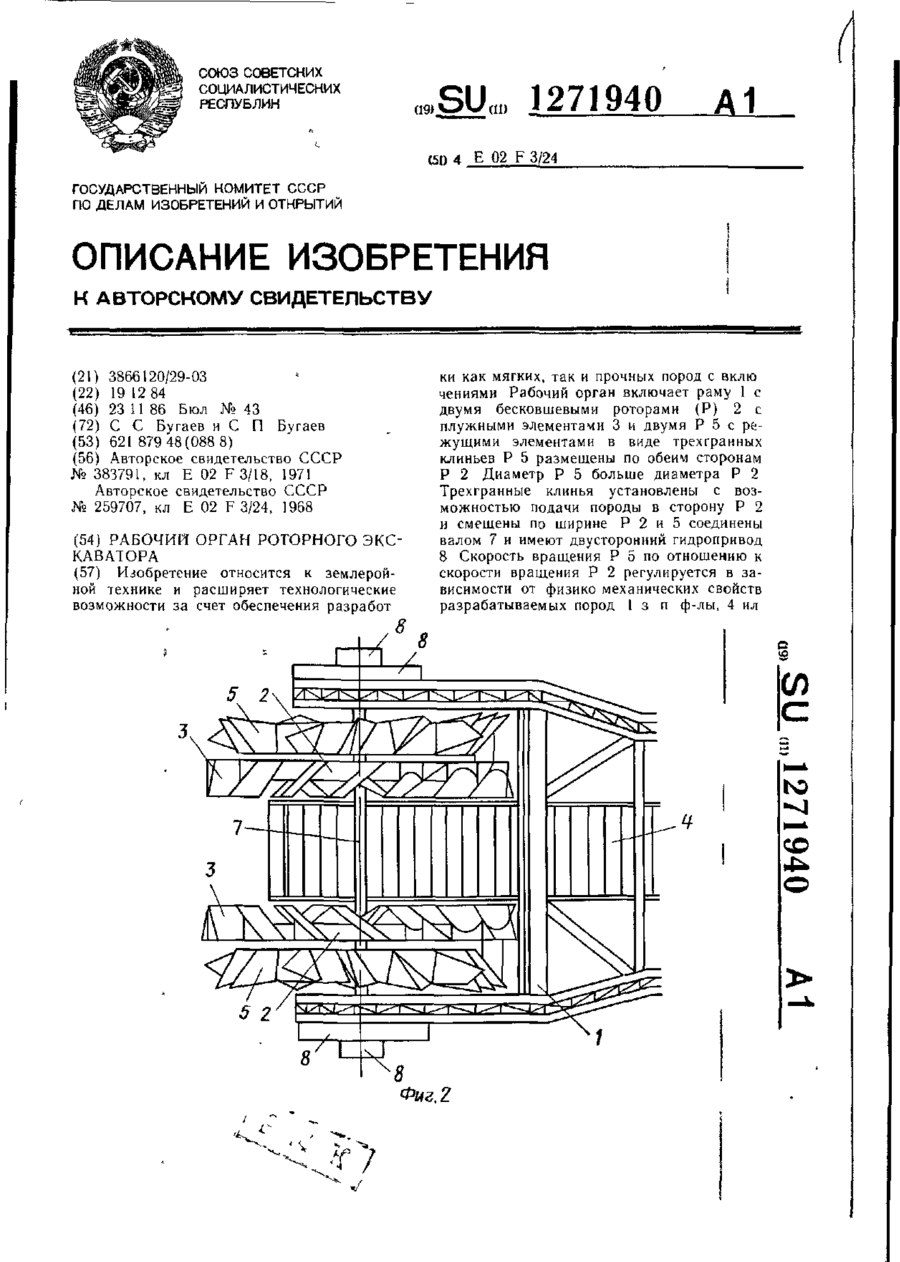
1. Рабочий орган роторного экскаватора, включающий установленные на раме бесковшовые роторы с плужными режущими элементами и размещенный между ними транспортирующий механизм, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения разработки как мягких, так и прочных пород с включениями, он снабжен роторами с режущими элементами в виде трехгранных клиньев, установленными по обеим сторонам бесковшовых...
Попередній патент: Привід круглов’язальної машини
Наступний патент: Кондукторний пристрій
Випадковий патент: Спосіб інтраокулярної корекції у дітей з монокулярною травматичною катарактою