Уловлювач для вантажопідйомних механізмів
Номер патенту: 84575
Опубліковано: 10.11.2008
Автори: Стукаленко Михайло Іванович, Стукаленко Віталій Михайлович, Стукаленко Олександр Михайлович
Формула / Реферат
Уловлювач для вантажопідйомних механізмів, який містить установлені на металоконструкції зрівняльний блок і напрямні ролики, що огинаються канатом, з котрим зв'язані гальмові елементи, який відрізняється тим, що кожен гальмовий елемент виконано у вигляді планок, підпружинених і притиснутих до каната регулюючими гвинтовими з'єднаннями, на металоконструкції з зазорами до торців гальмових планок встановлено упори для їх взаємодії з планками після обриву вітки каната.
Текст
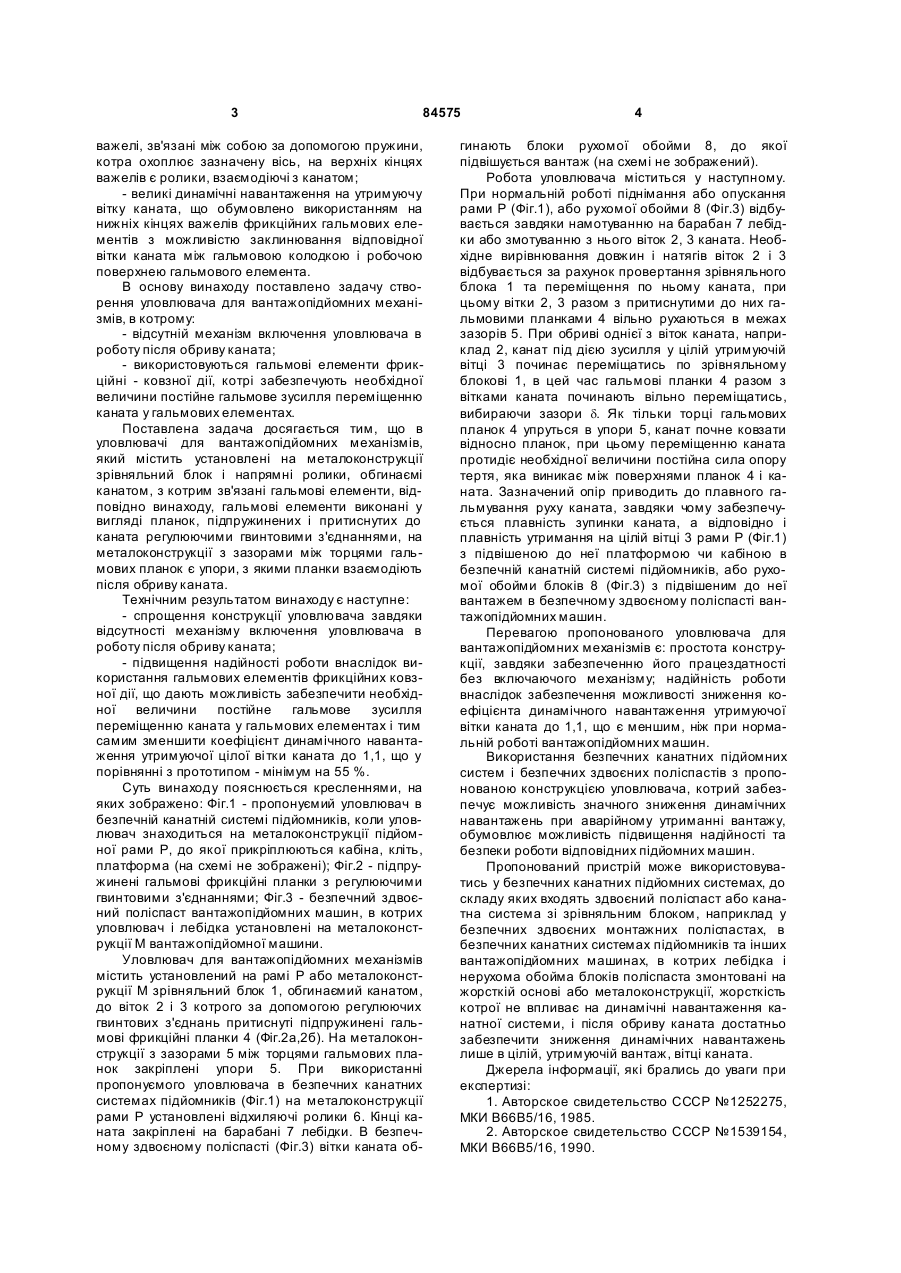
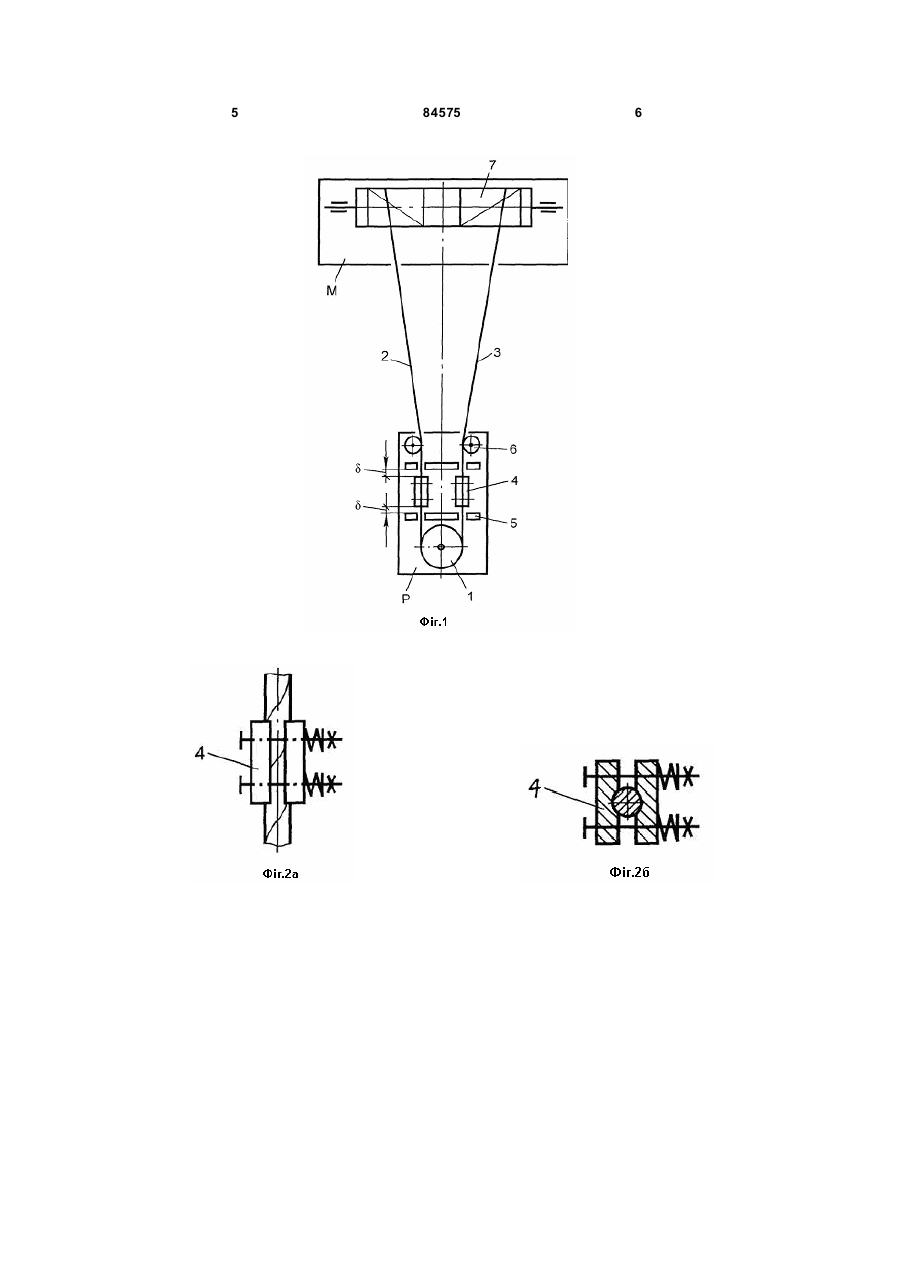
Уловлювач для вантажопідйомних механізмів, який містить установлені на металоконструкції зрівняльний блок і напрямні ролики, що огинаються канатом, з котрим зв'язані гальмові елементи, який відрізняється тим, що кожен гальмовий елемент виконано у вигляді планок, підпружинених і притиснутих до каната регулюючими гвинтовими з'єднаннями, на металоконструкції з зазорами до торців гальмових планок встановлено упори для їх взаємодії з планками після обриву вітки каната. (19) (21) a200603718 (22) 05.04.2006 (24) 10.11.2008 (46) 10.11.2008, Бюл.№ 21, 2008 р. (72) СТУКАЛЕНКО МИ ХАЙЛО ІВАНОВИЧ, U A, СТУКАЛЕНКО ОЛЕКСАНДР МИ ХАЙЛОВИЧ, UA, СТУКАЛЕНКО ВІТАЛІЙ МИХАЙЛОВИЧ, UA (73) ОДЕСЬКА ДЕРЖАВН А АКАДЕМІЯ БУДІВНИЦТВА ТА АРХІТЕКТУРИ, U A (56) SU 1252275 A1, 23.08.1986 SU 1539154 A1, 30.01.1990 GB 236905, 27.08.1925 JP 02310280, 26.12.1990 3 84575 важелі, зв'язані між собою за допомогою пружини, котра охоплює зазначену вісь, на верхніх кінцях важелів є ролики, взаємодіючі з канатом; - великі динамічні навантаження на утримуючу вітку каната, що обумовлено використанням на нижніх кінцях важелів фрикційних гальмових елементів з можливістю заклинювання відповідної вітки каната між гальмовою колодкою і робочою поверхнею гальмового елемента. В основу винаходу поставлено задачу створення уловлювача для вантажопідйомних механізмів, в котрому: - відсутній механізм включення уловлювача в роботу після обриву каната; - використовуються гальмові елементи фрикційні - ковзної дії, котрі забезпечують необхідної величини постійне гальмове зусилля переміщенню каната у гальмових елементах. Поставлена задача досягається тим, що в уловлювачі для вантажопідйомних механізмів, який містить установлені на металоконструкції зрівняльний блок і напрямні ролики, обгинаємі канатом, з котрим зв'язані гальмові елементи, відповідно винаходу, гальмові елементи виконані у вигляді планок, підпружинених і притиснутих до каната регулюючими гвинтовими з'єднаннями, на металоконструкції з зазорами між торцями гальмових планок є упори, з якими планки взаємодіють після обриву каната. Технічним результатом винаходу є наступне: - спрощення конструкції уловлювача завдяки відсутності механізму включення уловлювача в роботу після обриву каната; - підвищення надійності роботи внаслідок використання гальмових елементів фрикційних ковзної дії, що дають можливість забезпечити необхідної величини постійне гальмове зусилля переміщенню каната у гальмових елементах і тим самим зменшити коефіцієнт динамічного навантаження утримуючої цілої ві тки каната до 1,1, що у порівнянні з прототипом - мінімум на 55 %. Суть винаходу пояснюється кресленнями, на яких зображено: Фіг.1 - пропонуємий уловлювач в безпечній канатній системі підйомників, коли уловлювач знаходиться на металоконструкції підйомної рами Р, до якої прикріплюються кабіна, кліть, платформа (на схемі не зображені); Фіг.2 - підпружинені гальмові фрикційні планки з регулюючими гвинтовими з'єднаннями; Фіг.3 - безпечний здвоєний поліспаст вантажопідйомних машин, в котрих уловлювач і лебідка установлені на металоконструкції М вантажопідйомної машини. Уловлювач для вантажопідйомних механізмів містить установлений на рамі Р або металоконструкції М зрівняльний блок 1, обгинаємий канатом, до віток 2 і 3 котрого за допомогою регулюючих гвинтових з'єднань притиснуті підпружинені гальмові фрикційні планки 4 (Фіг.2а,2б). На металоконструкції з зазорами 5 між торцями гальмових планок закріплені упори 5. При використанні пропонуємого уловлювача в безпечних канатних системах підйомників (Фіг.1) на металоконструкції рами Р установлені відхиляючі ролики 6. Кінці каната закріплені на барабані 7 лебідки. В безпечному здвоєному поліспасті (Фіг.3) вітки каната об 4 гинають блоки рухомої обойми 8, до якої підвішується вантаж (на схемі не зображений). Робота уловлювача міститься у наступному. При нормальній роботі піднімання або опускання рами Р (Фіг.1), або рухомої обойми 8 (Фіг.3) відбувається завдяки намотуванню на барабан 7 лебідки або змотуванню з нього віток 2, 3 каната. Необхідне вирівнювання довжин і натягів віток 2 і 3 відбувається за рахунок провертання зрівняльного блока 1 та переміщення по ньому каната, при цьому вітки 2, 3 разом з притиснутими до них гальмовими планками 4 вільно рухаються в межах зазорів 5. При обриві однієї з віток каната, наприклад 2, канат під дією зусилля у цілій утримуючій вітці 3 починає переміщатись по зрівняльному блокові 1, в цей час гальмові планки 4 разом з вітками каната починають вільно переміщатись, вибираючи зазори d. Як тільки торці гальмових планок 4 упруться в упори 5, канат почне ковзати відносно планок, при цьому переміщенню каната протидіє необхідної величини постійна сила опору тертя, яка виникає між поверхнями планок 4 і каната. Зазначений опір приводить до плавного гальмування руху каната, завдяки чому забезпечується плавність зупинки каната, а відповідно і плавність утримання на цілій вітці 3 рами Р (Фіг.1) з підвішеною до неї платформою чи кабіною в безпечній канатній системі підйомників, або рухомої обойми блоків 8 (Фіг.3) з підвішеним до неї вантажем в безпечному здвоєному поліспасті вантажопідйомних машин. Перевагою пропонованого уловлювача для вантажопідйомних механізмів є: простота конструкції, завдяки забезпеченню його працездатності без включаючого механізму; надійність роботи внаслідок забезпечення можливості зниження коефіцієнта динамічного навантаження утримуючої вітки каната до 1,1, що є меншим, ніж при нормальній роботі вантажопідйомних машин. Використання безпечних канатних підйомних систем і безпечних здвоєних поліспастів з пропонованою конструкцією уловлювача, котрий забезпечує можливість значного зниження динамічних навантажень при аварійному утриманні вантажу, обумовлює можливість підвищення надійності та безпеки роботи відповідних підйомних машин. Пропонований пристрій може використовуватись у безпечних канатних підйомних системах, до складу яких входять здвоєний поліспаст або канатна система зі зрівняльним блоком, наприклад у безпечних здвоєних монтажних поліспастах, в безпечних канатних системах підйомників та інших вантажопідйомних машинах, в котрих лебідка і нерухома обойма блоків поліспаста змонтовані на жорсткій основі або металоконструкції, жорсткість котрої не впливає на динамічні навантаження канатної системи, і після обриву каната достатньо забезпечити зниження динамічних навантажень лише в цілій, утримуючій вантаж, вітці каната. Джерела інформації, які брались до уваги при експертизі: 1. Авторское свидетельство СССР №1252275, МКИ В66В5/16, 1985. 2. Авторское свидетельство СССР №1539154, МКИ В66В5/16, 1990. 5 84575 6 7 Комп’ютерна в ерстка В. Клюкін 84575 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCatcher for hoisting mechanisms
Автори англійськоюStukalenko Mykhailo Ivanovych, Stukalenko Oleksandr Mykhailovych, Stukalenko Vitalii Mykhailovych
Назва патенту російськоюУловитель для грузоподъемных механизмов
Автори російськоюСтукаленко Михаил Иванович, Стукаленко Александр Михайлович, Стукаленко Виталий Михайлович
МПК / Мітки
МПК: B66D 1/54, B66C 15/00, B66B 5/16
Мітки: вантажопідйомних, механізмів, уловлювач
Код посилання
<a href="https://ua.patents.su/4-84575-ulovlyuvach-dlya-vantazhopidjjomnikh-mekhanizmiv.html" target="_blank" rel="follow" title="База патентів України">Уловлювач для вантажопідйомних механізмів</a>
Пристрій для керування електродвигунами перемінного струму приводів механізмів, наприклад, вантажопідйомних пристроїв
Номер патенту: 29043
Опубліковано: 10.01.2008
Автори: Таушанов Василь Георгійович, Токарев Валерій Веніамінович, Васильченко Сергій Іванович, Токарев Веніамін Петрович
МПК: B66C 13/22, H02P 1/00
Мітки: струму, пристроїв, пристрій, механізмів, електродвигунами, керування, приводів, наприклад, вантажопідйомних, перемінного
Формула / Реферат:
Пристрій для керування електродвигунами перемінного струму приводів механізмів, наприклад, вантажопідйомних пристроїв, що містить принаймні один прямоточний командоконтролер, який відрізняється тим, що послідовно з командоконтролером установлений контактор, що живиться від власного силового кола.
Уловлювач парашута шахтної кліті
Номер патенту: 60664
Опубліковано: 15.10.2003
Автор: Почтовенко Вячеслав Юрійович
МПК: B66B 5/16
Мітки: кліті, парашута, шахтної, уловлювач
Формула / Реферат:
Уловлювач парашута шахтної кліті, що містить привід, виконаний у вигляді пружини, з'єднаної за допомогою стакана з фланцем зі штоком, що проходить через горизонтальну плиту і з'єднаний з важільною системою, який відрізняється тим, що його обладнано додатковими привідними пружинами, розташованими зовні стакана на його фланці рівномірно по колу щодо штока, і вертикальними штангами, закріпленими одним кінцем у горизонтальній плиті і...
Пристрій для захисту вантажопідйомних кранів від ударів при зіткненнях
Номер патенту: 33473
Опубліковано: 25.06.2008
Автори: Аветісян Сергій Манукович, Нєженцев Олексій Борисович, Климчук Сергій Олександрович, Клімчук Олександр Сергійович
МПК: B66C 7/00
Мітки: вантажопідйомних, пристрій, захисту, кранів, зіткненнях, ударів
Формула / Реферат:
Пристрій для захисту вантажопідйомних кранів від ударів при зіткненнях, що містить тягу, гальмовий важіль, гальмову колодку, який відрізняється тим, що тяга розташована всередині бази кінцевої балки крана і з'єднує торці плечей двох гальмових важелів, розташованих консольно з кожної сторони кінцевої балки, з двома гальмовими колодками, що переміщуються в похилих напрямних, через систему шарнірно з'єднаних, похило встановлених важелів, з...
Ексцентриковий уловлювач стрічки похилого конвеєра
Номер патенту: 34373
Опубліковано: 11.08.2008
Автори: Александрова Тетяна Володимирівна, Мелащенко Володимир Антонович
МПК: B65G 43/06
Мітки: стрічки, уловлювач, ексцентриковий, похилого, конвеєра
Формула / Реферат:
Ексцентриковий уловлювач стрічки похилого конвеєра, що складається з двох частин, встановлених по обох сторонах конвеєрного поставу дзеркально відносно одна до одної, кожна його частина містить корпус, ексцентрик із контрвантажем, встановлений на осі під стрічкою з зазором, опору, встановлену над стрічкою із зазором, та жорстко встановлений на корпусі уловлювача обмежувач повороту ексцентрика, який відрізняється тим, що контрвантажі розміщені...
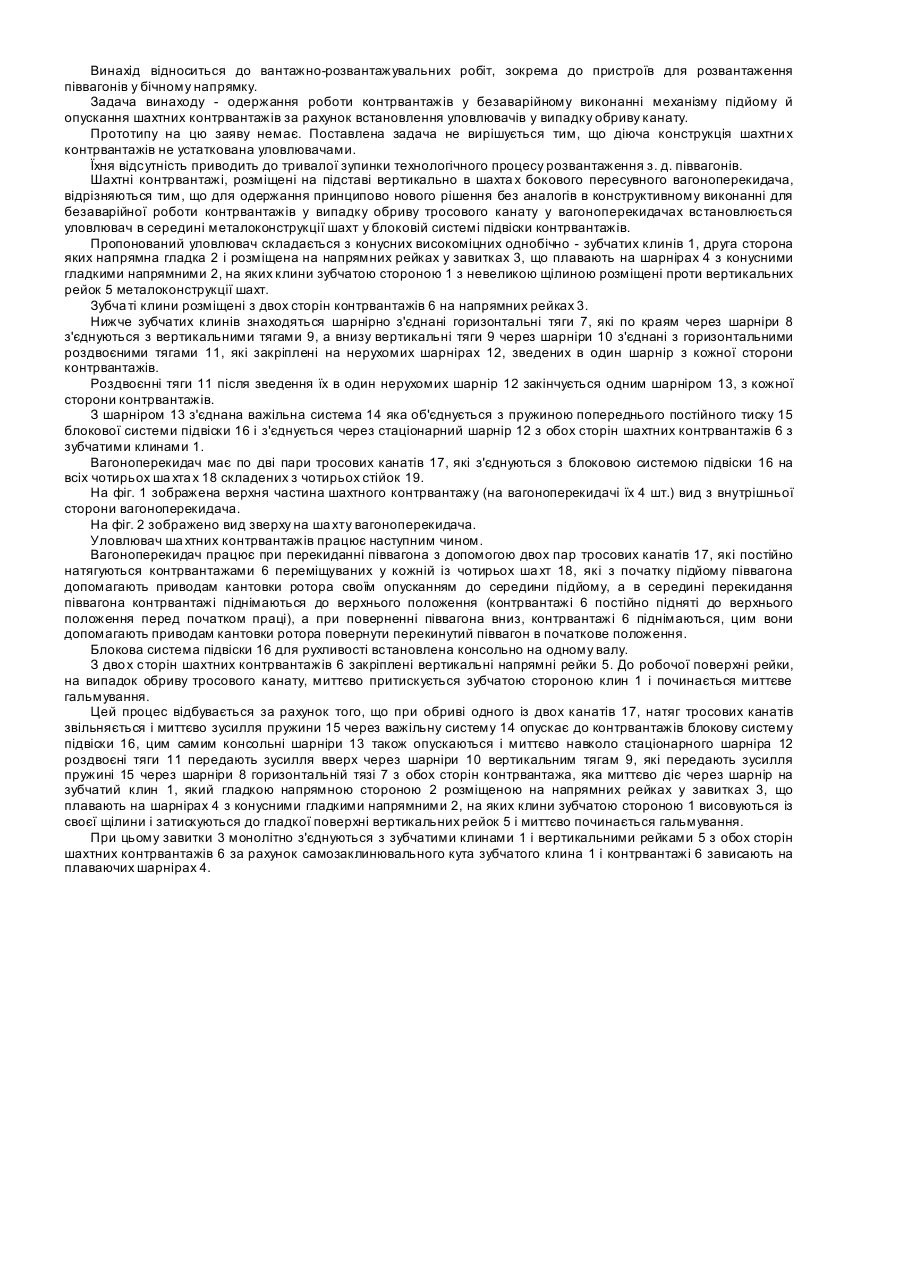
Уловлювач шахтних контрвантажів бокового пересувного вагоноперекидача
Номер патенту: 72851
Опубліковано: 15.04.2005
Автори: Довгий Олександр Іванович, Марченко Олександр Федорович, Кліндухов Ігор Олександрович, Бринза Олександр Федорович, Чуйко Іван Семенович
МПК: B65G 67/48
Мітки: уловлювач, контрвантажів, пересувного, шахтних, бокового, вагоноперекидача
Формула / Реферат:
Уловлювач шахтних контрвантажів, що розміщений на підставці вертикально в шахтах бокового пересувного вагоноперекидача, який відрізняється тим, що уловлювач шахтних контрвантажів встановлений усередині металоконструкції шахти у верхній частині блокової системи підвіски вантажів, що складається з конусних високоміцних однобічно зубчастих клинів, друга сторона клинів гладка і розміщена на напрямних рейках у завитках, плаваючих на шарнірах з...
Попередній патент: Пристрій для виготовлення тонкостінних гнутих профілів (варіанти)
Наступний патент: Сполуки бензоімідазолу
Випадковий патент: Безшумний боєприпас для стрілецької зброї