Спосіб автоматизованого розпізнавання показів значень зі шкал стрілочних вимірювальних приладів
Формула / Реферат
Спосіб автоматизованого розпізнавання показів значень зі шкал стрілочних вимірювальних приладів, при якому оптично сканують шкалу приладу при нульовому положенні стрілки, який відрізняється тим, що сканують положення стрілки на конкретному значенні приладу, після чого здійснюють бінаризацію цих зображень, визначають їх різницю для чіткого виділення стрілок, які розпізнають за допомогою перетворення Хафа та обраховують кут між цими стрілками за формулою ![]() (1),
(1),
де ![]() і
і ![]() - координати точок першої прямої;
- координати точок першої прямої;
![]() і
і ![]() - координати точок другої;
- координати точок другої;
який використовують для обрахунку значення стрілочного приладу за допомогою пропорції.
Текст
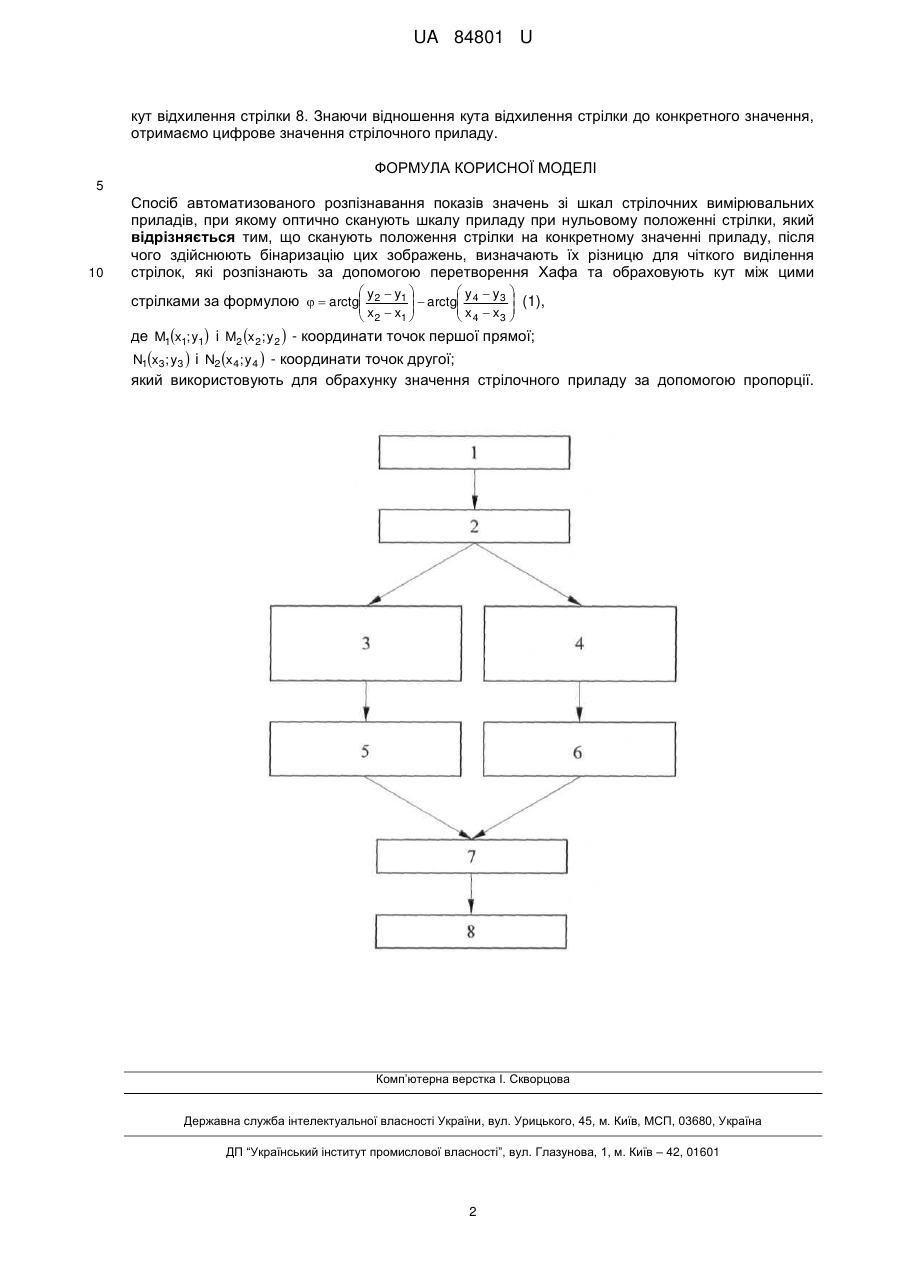
Реферат: UA 84801 U UA 84801 U 5 10 15 20 25 30 35 Корисна модель належить до контрольно-вимірювальної техніки і може бути використана у пристроях автоматики або при автоматизованому розпізнаванні показів значень зі шкал стрілочних вимірювальних приладів. Відомий спосіб повірки вимірювальних приладів (патент СРСР № 911396), оснований на використанні основної і додаткової мір, що підключаються до входу приладу, з метою зменшення часу повірки, на виході основної міри встановлюють калібровані рівні фізичної величини, відповідні до відміток, що повіряються, потім за допомогою додаткового міри ці калібровані рівні змінюють на величину, рівну величині допустимої абсолютної похибки відповідного класу приладу, що повіряється, вбік збільшення (зменшення), якщо покази приладу, що повіряються, виявляються менші (більші) необхідного рівня вимірюваної фізичної величини, і якщо при зміні каліброваних рівнів фізичної величини покази приладу проходить через відповідні відмітки, що повіряються, то прилад вважають відповідним до встановленого класу точності. Недоліком відомого способу є низька точність повірки вимірювальних приладів. Прототипом є спосіб автоматичного зчитування показань зі шкал стрілочних вимірювальних приладів при їхній повірці (патент РФ № 2035746), відповідно до якого здійснюють оптичне сканування шкали приладу, що повіряється, у напрямку, що збігається з напрямком шкали, виділяють у процесі сканування сигнали, відповідні до відлічуваних елементів приладу, визначають положення покажчика й відміток шкали по положенню виділених сигналів, здійснюють сканування всієї шкали при встановленому на нульову відмітку покажчика, по виділеним у процесі сканування сигналам визначають число й положення відміток шкали, після чого при подачі на вхід приладу заданого вхідного сигналу здійснюють сканування всієї шкали, у процесі якого визначають число й положення виділених сигналів, у випадку збігу числа виділених сигналів із числом відміток шкали фіксують сполучення покажчика з відміткою шкали, що повіряється, а якщо ні, то визначають положення покажчика по положенню одного з виділених сигналів, що не збігається з жодним з раніше певних положень відміток шкали. Недоліком є низька швидкодія даного способу. В основу корисної моделі покладена задача створення способу автоматизованого розпізнавання показів значень зі шкал стрілочних вимірювальних приладів, в якому за рахунок введення нових операцій та їх послідовності підвищується швидкодія пропонованого способу. Поставлена задача вирішується тим, що в способі автоматизованого розпізнавання показів значень зі шкал стрілочних вимірювальних приладів, при якому оптично сканують шкалу приладу при нульовому положенні стрілки, далі сканують положення стрілки на конкретному значенні приладу, після чого здійснюють бінаризацію цих зображень, визначають їх різницю для чіткого виділення стрілок, які розпізнають за допомогою перетворення Хафа та обраховують кут між цими стрілками за формулою y y3 y y arctg 2 1 arctg 4 x x x x 3 2 1 4 , (1), M1x1; y1 M2 x 2; y2 де N1x3; y3 40 45 50 55 і - координати точок першої прямої; і N2 x4; y4 - координати точок другої; який використовують для обрахунку значення стрілочного приладу за допомогою пропорції. На кресленні представлена схема, за допомогою якої реалізується пропонований спосіб. Схема містить: 1 стрілочний прилад; 2 веб-камера; 3 зображення вимірювального приладу при нульовому положенні стрілки; 4 зображення вимірювального приладу при будь-якому положенні стрілки; 5 бінаризація зображення вимірювального приладу при нульовому положенні стрілки; 6 бінаризація зображення вимірювального приладу при будь-якому положенні стрілки; 7 різниця зображень вимірювального приладу при нульовому положенні стрілки та при будьякому положенні стрілки; 8 розпізнавання кута відхилення стрілки та обрахунок значення вимірювального приладу. Спосіб здійснюється наступним чином: веб-камеру 2 направляють на стрілочний вимірювальний прилад 1. При цьому налаштовують поріг бінаризації і фотографують прилад при нульовому положенні стрілки 3. На прилад 1 подається сигнал. При кожній наступній ітерації фотографуємо значення стрілочного вимірювального приладу 4. Далі зображення 3 та 4 бінаризуються (відповідно 5 та 6). Потім знаходимо різницю зображень 7 при нульовому положенні і будь-якому положенні стрілки вимірювального приладу. Використовуючи перетворення Хафа, визначають координати прямих та за допомогою формули (1) обраховують 1 UA 84801 U кут відхилення стрілки 8. Знаючи відношення кута відхилення стрілки до конкретного значення, отримаємо цифрове значення стрілочного приладу. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Спосіб автоматизованого розпізнавання показів значень зі шкал стрілочних вимірювальних приладів, при якому оптично сканують шкалу приладу при нульовому положенні стрілки, який відрізняється тим, що сканують положення стрілки на конкретному значенні приладу, після чого здійснюють бінаризацію цих зображень, визначають їх різницю для чіткого виділення стрілок, які розпізнають за допомогою перетворення Хафа та обраховують кут між цими y y3 y2 y1 arctg 4 x x (1), x2 x1 3 4 стрілками за формулою arctg де M1x1; y1 і M2 x2; y2 - координати точок першої прямої; N1x3; y3 і N2 x4; y4 - координати точок другої; який використовують для обрахунку значення стрілочного приладу за допомогою пропорції. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01R 35/00, G06K 9/58
Мітки: стрілочних, шкал, автоматизованого, приладів, вимірювальних, показів, розпізнавання, спосіб, значень
Код посилання
<a href="https://ua.patents.su/4-84801-sposib-avtomatizovanogo-rozpiznavannya-pokaziv-znachen-zi-shkal-strilochnikh-vimiryuvalnikh-priladiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматизованого розпізнавання показів значень зі шкал стрілочних вимірювальних приладів</a>
Спосіб перевірки вимірювальних приладів альфа-випромінювання
Номер патенту: 22327
Опубліковано: 25.04.2007
Автори: Сердюк Андрій Михайлович, Лось Іван Павлович, Павленко Тетяна Олександрівна, Аксьонов Микола Васильович
МПК: G01T 1/178
Мітки: вимірювальних, приладів, перевірки, спосіб, альфа-випромінювання
Формула / Реферат:
Спосіб перевірки вимірювальних приладів альфа-випромінювання, що включає заповнення вимірювальної камери газом (радоном-222), визначення об’ємної активності радону, розміщення у камері приладу, що перевіряється, реєстрацію його показань, порівняння показань приладу та визначеної об’ємної активності радону, визначення відносної похибки приладу, що перевіряється, який відрізняється тим, що визначення об’ємної активності радону здійснюють...
Установка для перевірки вимірювальних приладів
Номер патенту: 58703
Опубліковано: 15.08.2003
Автори: Карташев Володимир Ілліч, Фіщук Сергій Віталійович, Лабунський Вадим Станіславович, Афінович Григорій Петрович
МПК: G01F 25/00
Мітки: приладів, вимірювальних, установка, перевірки
Формула / Реферат:
Установка для перевірки вимірювальних приладів, що містить пристрій для виміру витрати рідини, пристрій для регулювання витрати рідини, сполучну ділянку трубопроводу, впускний і зливальний патрубки, яка відрізняється тим, що установка додатково містить перемикальний пристрій, датчики тиску і температури, пристрій керування і блок електроживлення, причому пристрій для виміру витрати рідини виконано у вигляді, щонайменше, одного зразкового...
Спосіб автоматизованого контролю та діагностування стрілочних переводів
Номер патенту: 50826
Опубліковано: 25.06.2010
Автори: Маловічко Володимир Володимирович, Гаврилюк Володимир Ілліч, Рибалка Роман Володимирович
МПК: B61L 7/00
Мітки: спосіб, стрілочних, діагностування, переводів, автоматизованого, контролю
Формула / Реферат:
Спосіб автоматизованого контролю та діагностування стрілочних переводів, при якому часову залежність струму виділяють, оцифровують, зберігають в пам'яті комп'ютера, який відрізняється тим, що додатково проводять порівняльний аналіз записаної залежності струму з попередніми записами часової залежності струму даної стрілки автоматично, для цього використовують два коридори допустимих значень вище кривої та два коридори нижче кривої, які задають...
Установка для перевірки вимірювальних приладів
Номер патенту: 60487
Опубліковано: 15.10.2003
Автори: Карташев Володимир Ілліч, Фіщук Сергій Віталійович, Лабунський Вадим Станіславович, Афінович Григорій Петрович
МПК: G01F 25/00
Мітки: приладів, вимірювальних, перевірки, установка
Формула / Реферат:
Установка для перевірки вимірювальних приладів, що містить пристрій для виміру витрати рідини 1 (2), пристрій для регулювання витрати рідини 6, сполучну ділянку трубопроводу, впускний 10 і зливальний 11 патрубки, яка відрізняється тим, що установка додатково має перемикаючий пристрій 5, датчики тиску 3 і температури 4, пристрій керування 8 і блок електроживлення 7, причому пристрій для виміру витрати рідини виконано у вигляді щонайменше...
Спосіб автоматизованого вимірювання вольт-амперних характеристик напівпровідникових приладів
Номер патенту: 96998
Опубліковано: 26.12.2011
Автори: Бондаренко Олександр Федорович, Єрмоленко Євген Олександрович
МПК: G01R 19/32, G01R 31/26
Мітки: приладів, автоматизованого, характеристик, вимірювання, спосіб, напівпровідникових, вольт-амперних
Формула / Реферат:
Спосіб автоматизованого вимірювання вольт-амперних характеристик напівпровідникових приладів, який полягає в тому, що на досліджуваний напівпровідниковий прилад подають послідовність прямокутних електричних імпульсів зі змінною амплітудою, реєструють відповідні значення відгуків на послідовність електричних імпульсів, який відрізняється тим, що перед подачею послідовності прямокутних електричних імпульсів реєструють початковий тепловий стан...
Попередній патент: Водогрійний твердопаливний котел
Наступний патент: Пристрій для підйому піддона, на якому встановлено безліч контейнерів або подібних ємностей (варіанти)
Випадковий патент: Пристрій для електроживлення навантаження зі змінним споживанням електроенергії