Пристрій для визначення кінематичних параметрів кранового візка
Номер патенту: 31546
Опубліковано: 10.04.2008
Автори: Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович


Формула / Реферат
Пристрій для визначення кінематичних параметрів кранового візка, що містить герконові реле (чутливі елементи): крайнього лівого, крайнього правого і середнього положень, закріплені на кран-балці, і магніт, який встановлений на візку крана та взаємодіє з герконовими реле, який відрізняється тим, що обладнаний датчиком руху візка, який складається з датчика прямого та датчика зворотного руху візка, які підключені до блока визначення напрямку руху візка, вихід якого з'єднаний з входом реверсивного лічильника, який своїм виходом підключений до індикатора, цифрового компаратора та цифрового диференціатора, причому вихід цифрового компаратора "більше-менше" підключений до реверсивного лічильника та до послідовно з'єднаних першого та другого цифрових диференціаторів, на входи яких підключений таймер, а їх виходи з'єднані з індикатором, крім того вихід блока точних координат візка підключений до реверсивного лічильника та цифрового компаратора, а на його входи підключені герконові реле, при цьому датчик руху візка конструктивно складається з колеса з прорізями, через які здійснюється оптичний зв'язок світлодіода і фотодіода датчика прямого руху та світлодіода і фотодіода датчика зворотного руху візка.
Текст
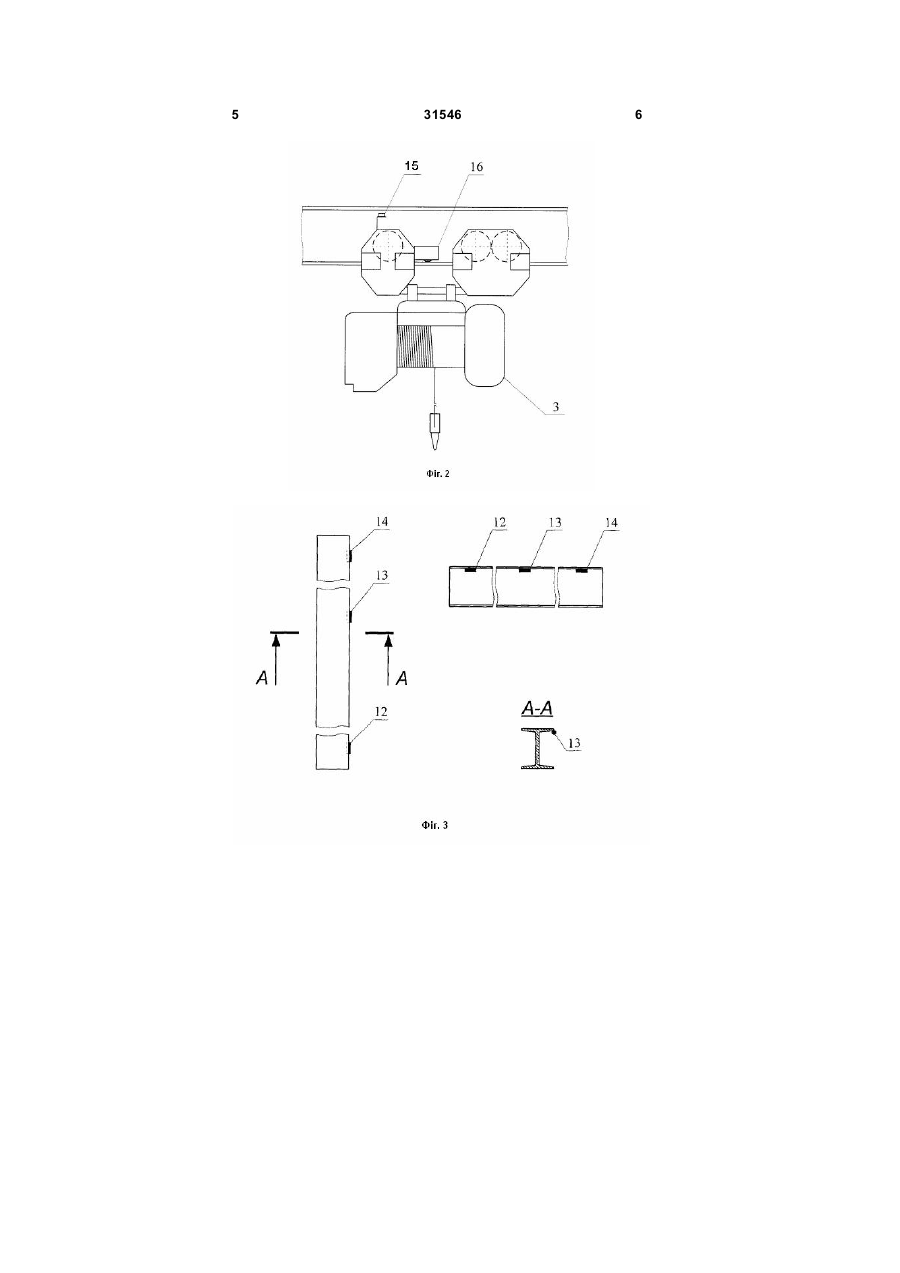
Пристрій для визначення кінематичних параметрів кранового візка, що містить герконові реле (чутливі елементи): крайнього лівого, крайнього правого і середнього положень, закріплені на кран-балці, і магніт, який встановлений на візку крана та взаємодіє з герконовими реле, який відрізняється тим, що обладнаний датчиком руху візка, який складається з датчика прямого та датчика зворотного руху візка, які підключені до блока визначення напрямку 3 31546 4 переміщення візка і магніту, на Фіг.3 - схема від кількості сприйнятих імпульсів. У випадку коли розміщення герконових реле на кран-балці, на візок рухається в зворотному напрямку в Фіг.4 - будова датчика переміщення візка. реверсивному лічильнику 5 відбувається зворотне Пристрій для визначення кінематичних лічення (віднімання) сприйнятих імпульсів від параметрів кранового візка, складається з датчика попередньої кількості. Цифровий код з виходу прямого 1 та датчика зворотного руху 2 реверсивного лічильника 5 двічі диференціюється вантажного візка 3. Виходи датчиків 1 та 2 в цифрових диференціаторах 8 та 9, а також підключені до блоку визначення напрямку руху надходить на індикатор 6. Продиференційований візка 4. Вихід блока 4 пов'язаний з входом сигнал знімається з цифрових диференціаторів 8 реверсивного лічильника 5, який своїм виходом та 9 і надходить на індикатор 6. Таймер 10, підключений до індикатора 6, цифрового підключений до цифрових диференціаторів 8 і 9, компаратора 7 та цифрового диференціатора 8. задає крок диференціювання. Таким чином, Вихід цифрового компаратора 7 „більше-менше" індикатор інформує про поточні переміщення підключений до реверсивного лічильника та до візка, його миттєву швидкість і прискорення. послідовно поєднаних цифрових диференціаторів Точність пропонованого пристрою 8 і 9, на входи яких підключений таймер 10, а їх забезпечується введенням в його конструкцію виходи поєднані з індикатором 6. Вихід блока блока точних координат візка 11. Під час точних координат візка 11 підключений до проходження магніту 15 під одним з герконових реверсивного лічильника 5 та цифрового реле 12, 13 або 14 воно спрацьовує. При цьому на компаратора. На три входи блока 11 підключені виході блока точних координат 11 формується герконові реле: крайнього лівого 12, крайнього паралельний цифровий код крайнього лівого, правого 14 та середнього положення 13. На крайнього правого або середнього положення на вантажному візку закріплені магніт 15 та датчик кран-балці в залежності від того, яке герконове руху візка 16, який об'єднує датчик прямого 1 та реле спрацювало. Паралельні коди з блоку точних зворотного 2 руху візка. Датчик руху візка 16 координат 11 та реверсивного лічильника 5 конструктивно складається з колеса 17 з надходять на цифровий компаратор 7, де прорізями, через які здійснюється оптичний зв'язок порівнюються між собою. У випадку, коли вони не світлодіода 18 ідля Пристрій фотодіода 19 та світлодіода 20 і визначення кінематичних рівні цифровий компаратор 7 формує сигнал, який фотодіода 21. параметрів кранового візка, працює так. Рух надходить на вхід реверсивного лічильника 5. вантажного візка 3 в прямому напрямку Останній переключається в режим паралельного призводить до обертання колеса 17 датчика руху завантаження даних з блоку точних координат 11 візка 16. При цьому працюють датчики прямого 1 візка. При цьому можливі корекції, які викличуть та зворотного 2 руху візка, тобто відбувається неправильну індикацію швидкості і прискорення, переривання оптичного зв'язку світлодіода 18 і тому в момент корекції цифрові диференціатори 8 фотодіода 19 та світлодіода 20 і фотодіода 21. На і 9 відключаються сигналом з цифрового фотодіодах 19 і 21 формуються імпульси напруги, компаратора 7. Чутливість цифрового які надходять на блок визначення напрямку руху 4, компаратора 7 можна обрати в межах другого який передає сигнали з того датчика, який перший молодшого розряду цифрового коду переміщення спрацює (від того датчика “в напрямку” якого візка. Пристрій дозволяє здійснювати моніторинг рухається візок). З виходу блока 4 визначення переміщення швидкості та прискорення візка, що напрямку руху візка імпульси напруги надходять збільшить ступінь інформованості оператора на вхід реверсивного лічильника 5, який формує крана і дозволить забезпечити безпечну паралельний цифровий код на виході в залежності експлуатацію крана в бажаному режим роботи. 5 31546 6 7 Комп’ютерна верстка Г. Паяльніков 31546 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining kinematic parameters of crane carriage
Автори англійськоюLoveikin Viacheslav Serhiiovych, Yaroshenko Volodymyr Fedorovych, Romasevych Yurii Oleksandrovych
Назва патенту російськоюУстройство для определения кинематических параметров крановой тележки
Автори російськоюЛовейкин Вячеслав Сергеевич, Ярошенко Владимир Федорович, Ромасевич Юрий Александрович
МПК / Мітки
МПК: B66C 13/00
Мітки: кінематичних, кранового, параметрів, візка, визначення, пристрій
Код посилання
<a href="https://ua.patents.su/4-31546-pristrijj-dlya-viznachennya-kinematichnikh-parametriv-kranovogo-vizka.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення кінематичних параметрів кранового візка</a>
Пристрій для керування приводом візка з вантажем на гнучкому підвісі
Номер патенту: 28823
Опубліковано: 25.12.2007
Автори: Ярошенко Володимир Федорович, Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/04
Мітки: пристрій, приводом, гнучкому, керування, вантажем, підвісі, візка
Формула / Реферат:
Пристрій для керування приводом візка з вантажем на гнучкому підвісі, що містить датчик довжини підвісу, блок пам'яті, компаратор, блок пам'яті, який відрізняється тим, що пристрій додатково обладнаний арифметичним блоком, на входи якого підключені блок формування маси візка, датчик довжини гнучкого підвісу, датчик швидкості візка та підключений через аналого-цифровий перетворювач датчик маси вантажу, при цьому вихід арифметичного пристрою...
Стенд для дослідження кінематичних і силових характеристик зв’язку колісної пари з рамою візка залізничного транспортного засобу
Номер патенту: 67217
Опубліковано: 15.06.2004
Автори: Кашура Олександр Леонідович, Горбунов Микола Іванович, Басов Генадій Григорьйович, Міщенко Костянтин Павлович, Найш Наум Михайлович, Могила Валентин Іванович, Малохатко Андрій Олександрович, Гундарь Володимир Петрович, Попов Сергій Валерійович
МПК: G01M 13/00, G01M 17/00
Мітки: засобу, характеристик, силових, рамою, кінематичних, дослідження, стенд, зв'язку, пари, колісної, транспортного, залізничного, візка
Формула / Реферат:
Стенд для дослідження кінематичних і силових характеристик зв'язку колісної пари з рамою візка залізничного транспортного засобу, що містить раму у вигляді жорстко укріпленої на фундаменті боковини візка з балкою, кронштейном з пазами для кріплення буксових повідків і опор буксових, пружин, опору кочення, буксовий вузол, утримуючий буксу, з крилами для встановлення пружин, у буксі виконані пази для кріплення повідків і підшипників, з...
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана
Номер патенту: 30454
Опубліковано: 25.02.2008
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович
МПК: B66C 13/04
Мітки: пристрій, обмеження, візка, розгойдувань, вантажу, крана, підвішеного
Формула / Реферат:
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана, що містить електропривід візка, датчик ваги вантажу, регулятор швидкості візка, джерело постійної напруги, який відрізняється тим, що обладнаний датчиком довжини каната, який підключений до першого входу блока-формувача часу розгону візка, з можливістю надходження на його другий вхід сигналу від блока-формувача номінальної швидкості візка, таймером, приєднаним до блока...
Пристрій для керування гальмуванням візка крана
Номер патенту: 27443
Опубліковано: 25.10.2007
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович
МПК: B66C 13/18
Мітки: крана, гальмуванням, пристрій, візка, керування
Формула / Реферат:
Пристрій для керування гальмуванням візка крана, що містить задатчик, який своїми виходами підключений до входів елементів порівняння, а їх виходи через ключові елементи з'єднані з частотним перетворювачем, інтегратор, шляховий вимикач та датчик швидкості, який відрізняється тим, що пристрій побудований по схемі з проміжною ланкою постійного струму, інтегратор підключений до датчика швидкості, а виходом - до другого елемента порівняння, крім...
Пристрій для визначення параметрів коливань елементів конструкції
Номер патенту: 42145
Опубліковано: 15.10.2001
Автори: Хворост Володимир Андрійович, Пузько Ігор Данилович, Павловський Михайло Антонович
МПК: G01H 13/00
Мітки: елементів, параметрів, визначення, пристрій, коливань, конструкції
Формула / Реферат:
Пристрій для визначення параметрів коливань елементів конструкцій, що містить послідовно сполучені блок керування розгорткою частоти, задавальний генератор, регулятор амплітуди, підсилювач потужності, виходом під'єднаний до обмотки котушки рухомої системи вібростенда, що призначена для установки випробуваного об'єкта перший віброперетворювач, установлений на платформі вібростенда, другий віброперетворювач, установлений на випробуваному...
Попередній патент: Антифрикційний композиційний матеріал на основі нікелю
Наступний патент: Пристрій для керування електроприводом механізму підйому прогінного крана
Випадковий патент: Вузли стикування елементів верхнього пояса трикутних металодерев'яних ферм