Процес автоматичного керування гальмуванням колісної машини
Номер патенту: 87699
Опубліковано: 10.08.2009
Автори: Шелудченко Володимир Віталійович, Гецович Євгеній Мойсейович, Селевич Сергій Геннадійович
Формула / Реферат
1. Процес автоматичного керування гальмуванням колісної машини, який полягає в безперервному коректуванні темпу зміни тиску у виконавчих апаратах гальмового приводу пропорційно різниці посилених сигналів кутового прискорення колеса та поздовжнього прискорення колісної машини, вимірюваних у процесі гальмування, з урахуванням знака різниці, який відрізняється тим, що коефіцієнт підсилення сигналу поздовжнього прискорення в кожному каналі керування збільшують пропорційно збільшенню навантажувально-зчіпних умов і зменшують пропорційно відносному поздовжньому ковзанню колеса (коліс), керованого даним каналом.
2. Процес автоматичного керування гальмуванням колісної машини за п. 1, який відрізняється тим, що при прямолінійному русі колісної машини коефіцієнт підсилення сигналу поздовжнього прискорення збільшують у каналах керування гальмуванням коліс передніх осей і зменшують у каналах керування гальмуванням коліс задніх осей пропорційно сигналу датчика поздовжнього прискорення.
3. Процес автоматичного керування гальмуванням колісної машини за п. 1, який відрізняється тим, що при криволінійному русі колісної машини коефіцієнт підсилення сигналу поздовжнього прискорення збільшують у каналах керування гальмуванням коліс зовнішнього борту та зменшують у каналах керування гальмуванням коліс внутрішнього борту пропорційно сигналу датчика поперечного прискорення колісної машини.
Текст
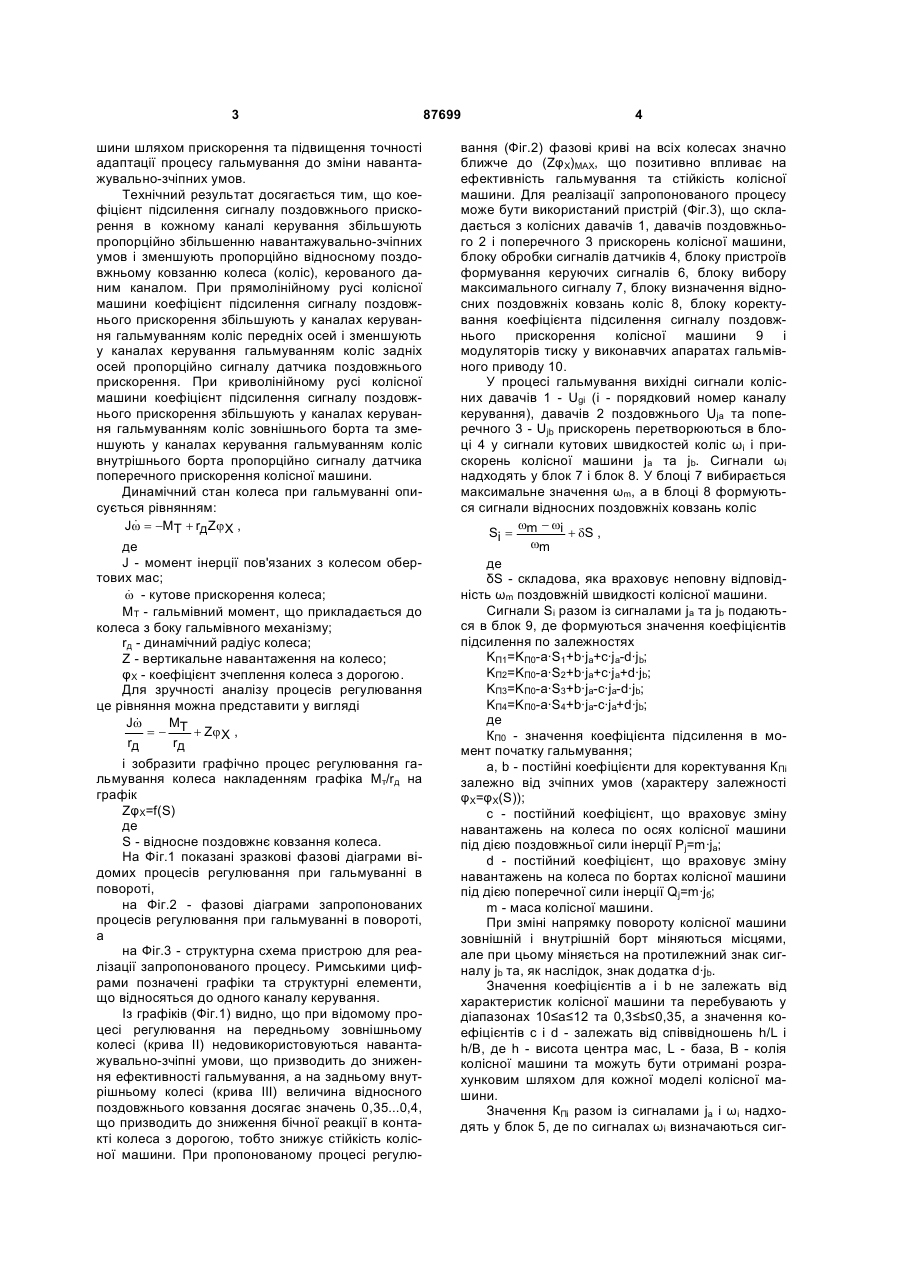
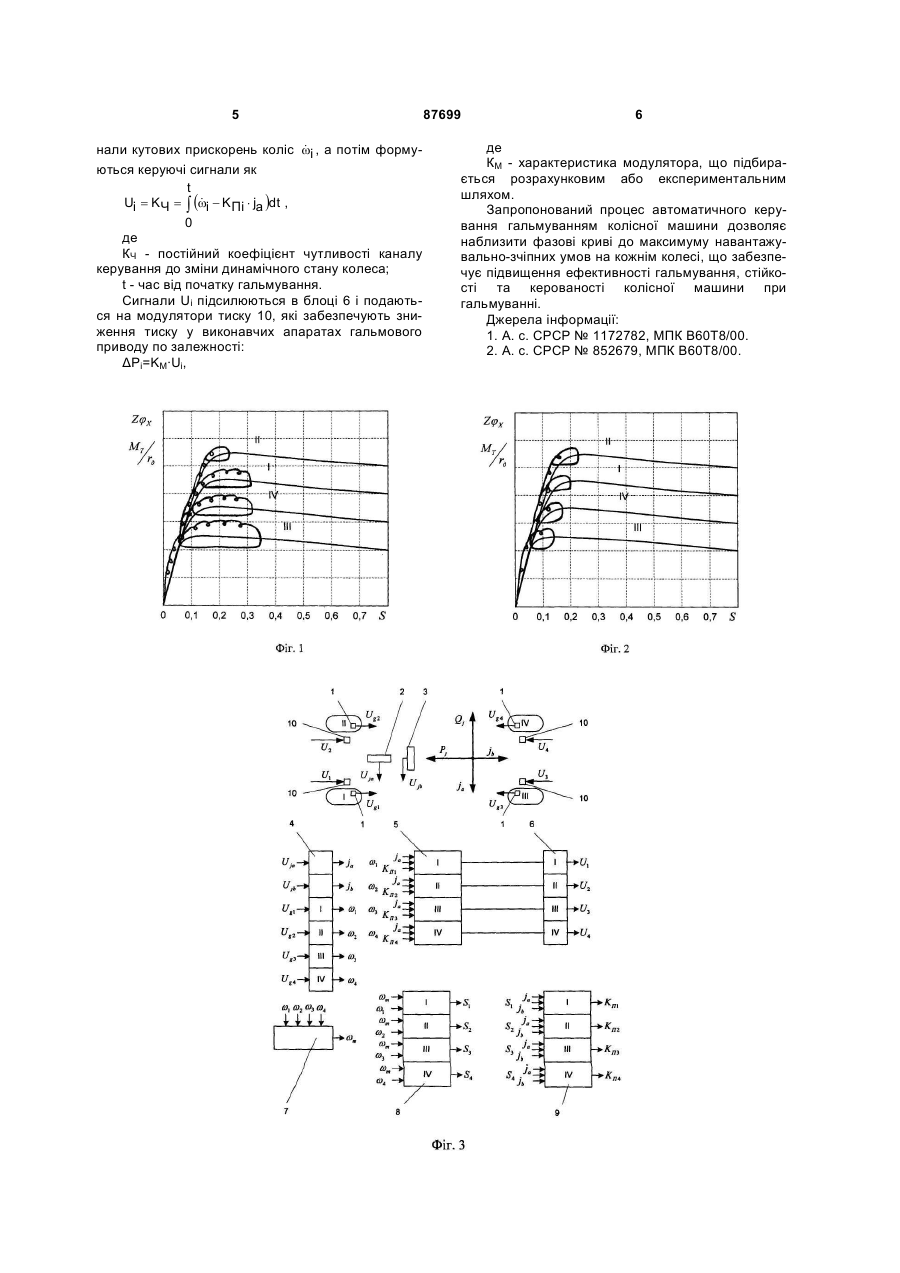
1. Процес автоматичного керування гальмуванням колісної машини, який полягає в безперервному коректуванні темпу зміни тиску у виконавчих апаратах гальмового приводу пропорційно різниці посилених сигналів кутового прискорення колеса C2 2 (19) 1 3 шини шляхом прискорення та підвищення точності адаптації процесу гальмування до зміни навантажувально-зчіпних умов. Технічний результат досягається тим, що коефіцієнт підсилення сигналу поздовжнього прискорення в кожному каналі керування збільшують пропорційно збільшенню навантажувально-зчіпних умов і зменшують пропорційно відносному поздовжньому ковзанню колеса (коліс), керованого даним каналом. При прямолінійному русі колісної машини коефіцієнт підсилення сигналу поздовжнього прискорення збільшують у каналах керування гальмуванням коліс передніх осей і зменшують у каналах керування гальмуванням коліс задніх осей пропорційно сигналу датчика поздовжнього прискорення. При криволінійному русі колісної машини коефіцієнт підсилення сигналу поздовжнього прискорення збільшують у каналах керування гальмуванням коліс зовнішнього борта та зменшують у каналах керування гальмуванням коліс внутрішнього борта пропорційно сигналу датчика поперечного прискорення колісної машини. Динамічний стан колеса при гальмуванні описується рівнянням: & Jw = -MT + rдZj X , де J - момент інерції пов'язаних з колесом обертових мас; & w - кутове прискорення колеса; МТ - гальмівний момент, що прикладається до колеса з боку гальмівного механізму; rд - динамічний радіус колеса; Z - вертикальне навантаження на колесо; φХ - коефіцієнт зчеплення колеса з дорогою. Для зручності аналізу процесів регулювання це рівняння можна представити у вигляді & Jw M = - T + Zj X , rд rд і зобразити графічно процес регулювання гальмування колеса накладенням графіка Мт/rд на графік ZφX=f(S) де S - відносне поздовжнє ковзання колеса. На Фіг.1 показані зразкові фазові діаграми відомих процесів регулювання при гальмуванні в повороті, на Фіг.2 - фазові діаграми запропонованих процесів регулювання при гальмуванні в повороті, а на Фіг.3 - структурна схема пристрою для реалізації запропонованого процесу. Римськими цифрами позначені графіки та структурні елементи, що відносяться до одного каналу керування. Із графіків (Фіг.1) видно, що при відомому процесі регулювання на передньому зовнішньому колесі (крива II) недовикористовуються навантажувально-зчіпні умови, що призводить до зниження ефективності гальмування, а на задньому внутрішньому колесі (крива III) величина відносного поздовжнього ковзання досягає значень 0,35...0,4, що призводить до зниження бічної реакції в контакті колеса з дорогою, тобто знижує стійкість колісної машини. При пропонованому процесі регулю 87699 4 вання (Фіг.2) фазові криві на всіх колесах значно ближче до (ZφX)MAX, що позитивно впливає на ефективність гальмування та стійкість колісної машини. Для реалізації запропонованого процесу може бути використаний пристрій (Фіг.3), що складається з колісних давачів 1, давачів поздовжнього 2 і поперечного 3 прискорень колісної машини, блоку обробки сигналів датчиків 4, блоку пристроїв формування керуючих сигналів 6, блоку вибору максимального сигналу 7, блоку визначення відносних поздовжніх ковзань коліс 8, блоку коректування коефіцієнта підсилення сигналу поздовжнього прискорення колісної машини 9 і модуляторів тиску у виконавчих апаратах гальмівного приводу 10. У процесі гальмування вихідні сигнали колісних давачів 1 - Ugі (і - порядковий номер каналу керування), давачів 2 поздовжнього Uja та поперечного 3 - Ujb прискорень перетворюються в блоці 4 у сигнали кутових швидкостей коліс ωі і прискорень колісної машини ja та jb. Сигнали ωі надходять у блок 7 і блок 8. У блоці 7 вибирається максимальне значення ωm, а в блоці 8 формуються сигнали відносних поздовжніх ковзань коліс w - wi Si = m + dS , wm де δS - складова, яка враховує неповну відповідність ωm поздовжній швидкості колісної машини. Сигнали Sі разом із сигналами ja та jb подаються в блок 9, де формуються значення коефіцієнтів підсилення по залежностях KП1=KП0-a·S1+b·ja+c·j a-d·jb; KП2=KП0-a·S2+b·ja+c·j a+d·jb; KП3=KП0-a·S3+b·ja-c·ja-d·jb; KП4=KП0-a·S4+b·ja-c·ja+d·jb; де КП0 - значення коефіцієнта підсилення в момент початку гальмування; a, b - постійні коефіцієнти для коректування КПі залежно від зчіпних умов (характеру залежності φX= φX(S)); с - постійний коефіцієнт, що враховує зміну навантажень на колеса по осях колісної машини під дією поздовжньої сили інерції Pj=m·ja; d - постійний коефіцієнт, що враховує зміну навантажень на колеса по бортах колісної машини під дією поперечної сили інерції Qj=m·jб; m - маса колісної машини. При зміні напрямку повороту колісної машини зовнішній і внутрішній борт міняються місцями, але при цьому міняється на протилежний знак сигналу jb та, як наслідок, знак додатка d·jb. Значення коефіцієнтів a і b не залежать від характеристик колісної машини та перебувають у діапазонах 10≤а≤12 та 0,3≤b≤0,35, а значення коефіцієнтів с і d - залежать від співвідношень h/L і h/B, де h - висота центра мас, L - база, В - колія колісної машини та можуть бути отримані розрахунковим шляхом для кожної моделі колісної машини. Значення КПі разом із сигналами jа і ωі надходять у блок 5, де по сигналах ωі визначаються сиг 5 & нали кутових прискорень коліс wi , а потім формуються керуючі сигнали як t & Ui = K Ч = ò (wi - K Пі × ja )dt , 0 де КЧ - постійний коефіцієнт чутливості каналу керування до зміни динамічного стану колеса; t - час від початку гальмування. Сигнали Uі підсилюються в блоці 6 і подаються на модулятори тиску 10, які забезпечують зниження тиску у виконавчих апаратах гальмового приводу по залежності: ΔРі=KМ·Uі, 87699 6 де КМ - характеристика модулятора, що підбирається розрахунковим або експериментальним шляхом. Запропонований процес автоматичного керування гальмуванням колісної машини дозволяє наблизити фазові криві до максимуму навантажувально-зчіпних умов на кожнім колесі, що забезпечує підвищення ефективності гальмування, стійкості та керованості колісної машини при гальмуванні. Джерела інформації: 1. А. с. СРСР № 1172782, МПК В60Т8/00. 2. А. с. СРСР № 852679, МПК В60Т8/00. 7 Комп’ютерна верстка С.Чулій 87699 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюProcess of automatic control of braking wheeled machine
Автори англійськоюHetsovych Yevhenii Moiseiovych, Selevych Serhii Hennadiiovych, Sheludchenko Volodymyr Vitaliiovych
Назва патенту російськоюПроцесс автоматического управления торможением колесной машины
Автори російськоюГецович Евгений Моисеевич, Селевич Сергей Геннадьевич, Шелудченко Владимир Витальевич
МПК / Мітки
МПК: B60T 8/00
Мітки: керування, колісної, гальмуванням, автоматичного, процес, машини
Код посилання
<a href="https://ua.patents.su/4-87699-proces-avtomatichnogo-keruvannya-galmuvannyam-kolisno-mashini.html" target="_blank" rel="follow" title="База патентів України">Процес автоматичного керування гальмуванням колісної машини</a>
Система автоматичного водіння самохідної колісної машини
Номер патенту: 71847
Опубліковано: 15.12.2004
Автори: Парфьонова Наталя Сергійовна, Поляшенко Сергій Олексійович
МПК: A01B 69/04
Мітки: водіння, автоматичного, машини, колісної, система, самохідної
Формула / Реферат:
Система автоматичного водіння самохідної колісної машини, що містить регулятор, виконавчий елемент, датчик копіювання, датчик положення керуючих коліс і суматор, яка відрізняється тим, що з метою підвищення точності відстеження заданої траєкторії, введені регульований інтегратор і датчик швидкості, причому регульований інтегратор включений послідовно між додатковим входом суматора і виходом датчика копіювання, а ланцюг керування коефіцієнтом...
Спосіб антиблокувального керування гальмуванням автомобіля
Номер патенту: 48538
Опубліковано: 15.08.2002
Автори: Кліменко Валерій Іванович, Нечитайло Юлія Анатоліївна, Левтеров Андрій Іванович, Богатиренко Костянтин Іванович
МПК: B60T 8/88
Мітки: спосіб, гальмуванням, антиблокувального, керування, автомобіля
Формула / Реферат:
Спосіб антиблокувального керування гальмуванням автомобіля, при якому на робочому органі створюють зусилля, менше за величиною, ніж зусилля, яке призводить до блокування колеса, який відрізняється тим, що екстремальне автоматичне керування гальмуванням автомобіля здійснюють шляхом вимірювання тангенційної складової сили тертя колеса і гальмової колодки при розгальмовуванні колеса в точці фактичного максимуму сили зчеплення колеса з...
Пристрій автоматичного керування рекуперативним гальмуванням електрорухомого складу постійного струму
Номер патенту: 70566
Опубліковано: 15.10.2004
Автор: Устименко Дмитро Володимирович
МПК: B60L 15/20, B60L 7/00
Мітки: рекуперативним, постійного, електрорухомого, автоматичного, пристрій, складу, керування, струму, гальмуванням
Формула / Реферат:
Пристрій автоматичного керування рекуперативним гальмуванням електрорухомого складу постійного струму, що містить статичний збудник, з'єднаний виходом з незалежною обмоткою збудження тягового двигуна, а входом - з широтно-імпульсним модулятором, до входу якого під'єднаний регулятор струму рекуперації, який відрізняється тим, що він має додатковий блок завдань і початкових умов та розв'язувальний блок, які з'єднані між собою послідовно, вихід...
Спосіб антиблокувального керування гальмуванням з підвищеною курсовою стійкістю транспортного засобу
Номер патенту: 11673
Опубліковано: 16.01.2006
Автори: Тимофєєв Віталій Сергійович, Богатиренко Костянтин Іванович, Лавріненко Олександр Сергійович
МПК: B60T 8/88
Мітки: стійкістю, керування, курсовою, антиблокувального, гальмуванням, засобу, транспортного, спосіб, підвищеною
Формула / Реферат:
Спосіб антиблокувального керування гальмуванням транспортного засобу, при якому екстремальне автоматичне керування гальмуванням транспортного засобу здійснюють шляхом виміру тангенціальної складової сили тертя між гальмовим диском і гальмовою колодкою при розгальмовуванні колеса в точці фактичного максимуму сили зчеплення коліс з дорожнім покриттям, який відрізняється тим, що визначають умови зчеплення кожного колеса (однієї осі) з дорожнім...
Пристрій для керування гальмуванням візка крана
Номер патенту: 27443
Опубліковано: 25.10.2007
Автори: Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович, Ромасевич Юрій Олександрович
МПК: B66C 13/18
Мітки: пристрій, гальмуванням, візка, крана, керування
Формула / Реферат:
Пристрій для керування гальмуванням візка крана, що містить задатчик, який своїми виходами підключений до входів елементів порівняння, а їх виходи через ключові елементи з'єднані з частотним перетворювачем, інтегратор, шляховий вимикач та датчик швидкості, який відрізняється тим, що пристрій побудований по схемі з проміжною ланкою постійного струму, інтегратор підключений до датчика швидкості, а виходом - до другого елемента порівняння, крім...
Попередній патент: Пристрій та спосіб для виготовлення упаковок сигарет на замовлення
Наступний патент: Герметик для упаковки скла та спосіб його виготовлення
Випадковий патент: Канал-біофільтр