Комбінована кореляційна диференційна система вирівнювання часових запізнювань сигналів
Номер патенту: 88528
Опубліковано: 26.10.2009
Автори: Зайцев Григорій Фролович, Булгач Віктор Леонардович, Градобоєва Неля Вікторівна, Кривуца Владимир Георгійович
Формула / Реферат
Комбінована кореляційна диференціальна система вирівнювання часових запізнювань сигналів, що надходять від одного джерела по двох каналах, перший з яких містить блок постійної затримки, вихід якого з'єднаний через перший блок часової затримки на Dt з першим входом першого корелятора і безпосередньо - з першим входом другого корелятора, при цьому перший і другий корелятори складаються з послідовно з'єднаних перемножувача і згладжувального фільтра, вихід другого каналу з'єднаний з першим входом блока керованої затримки, вихід якого з'єднаний з другим входом першого корелятора і через другий блок затримки на Dt - з другим входом другого корелятора, виходи першого і другого кореляторів підключені до першого віднімального пристрою, вихід якого з'єднаний з першим підсилювачем-перетворювачем, а виконавчий елемент підключений до другого входу блока керованої затримки, яка відрізняється тим, що в неї додатково введені підсумовувальний пристрій, другий підсилювач-перетворювач, другий віднімальний пристрій, третій і четвертий блоки часової затримки на Dt, третій і четвертий корелятори, що складаються з послідовно з'єднаних помножувача і згладжувального фільтра, причому перший вхід третього корелятора підключений до виходу блока постійної затримки першого каналу через третій блок часової затримки на Dt, перший вхід четвертого корелятора також підключений до виходу блока постійної затримки, вихід другого каналу підключений до другого входу третього корелятора і через четвертий блок часової затримки на Dt - до другого входу четвертого корелятора, виходи третього і четвертого кореляторів підключені до другого віднімального пристрою, вихід якого через другий підсилювач-перетворювач підключений до першого входу підсумовувального пристрою, другий вхід якого підключений до виходу першого підсилювача-перетворювача, а вихід з'єднаний із входом виконавчого елемента.
Текст
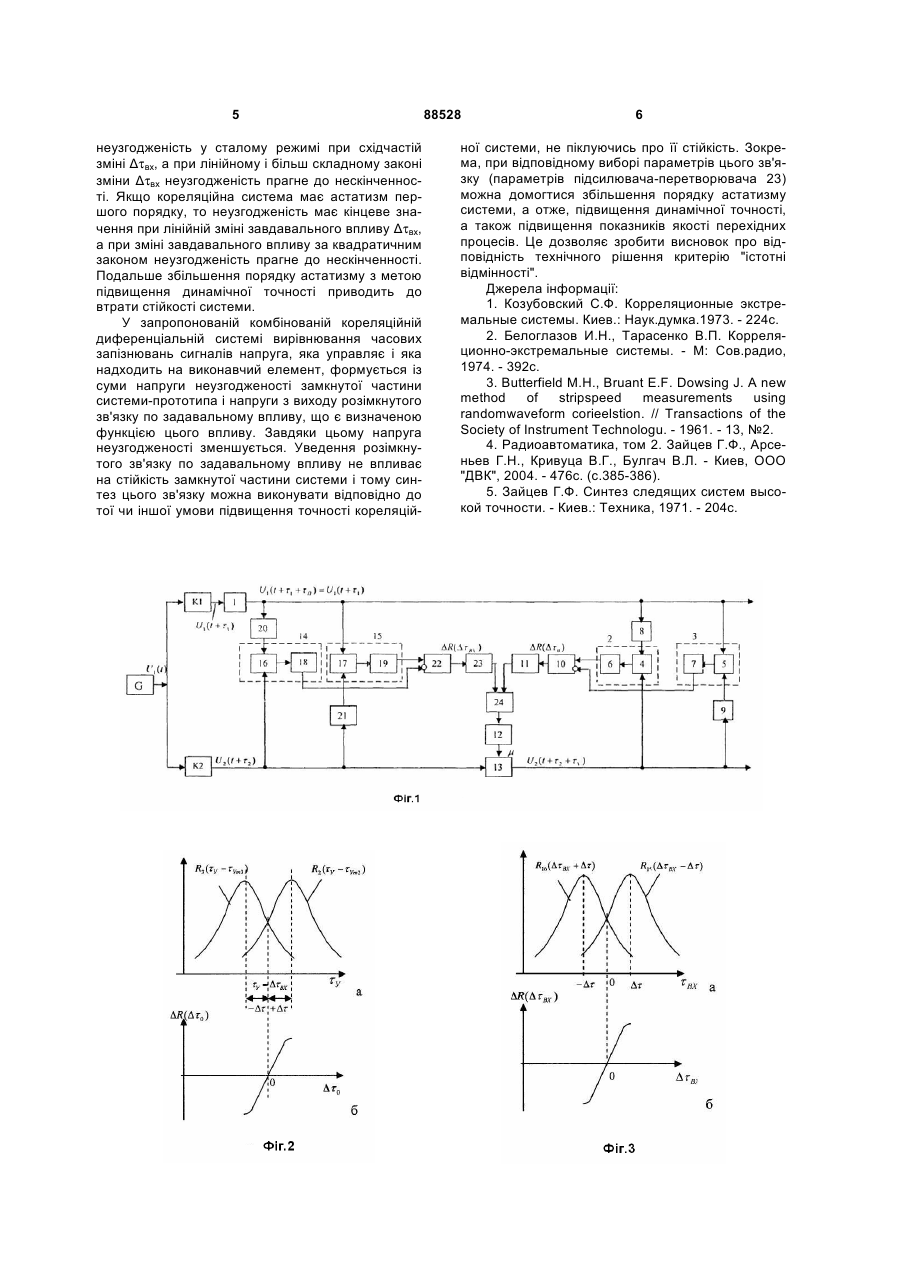
Комбінована кореляційна диференціальна система вирівнювання часових запізнювань сигналів, що надходять від одного джерела по двох каналах, перший з яких містить блок постійної затримки, вихід якого з'єднаний через перший блок часової затримки на ∆τ з першим входом першого корелятора і безпосередньо - з першим входом другого корелятора, при цьому перший і другий корелятори складаються з послідовно з'єднаних перемножувача і згладжувального фільтра, вихід другого каналу з'єднаний з першим входом блока керованої затримки, вихід якого з'єднаний з другим C2 2 (19) 1 3 забезпечувала найбільш високий ступінь їхньої кореляції. Дана кореляційна диференціальна система вирівнювання часових запізнювань сигналів прийнята за прототип. Недолік системи-прототипу полягає в тому, що вона побудована на підставі принципу управління по відхиленню і, як усі системи автоматичного управління цього класу, мають протиріччя між умовами підвищення динамічної точності і стійкості. Це протиріччя є перешкодою на шляху підвищення динамічної точності і швидкодії системипрототипу. Винахід дозволяє зменшити помилки кореляційної диференціальної системи, які викликані зміною завдавального впливу - різниці часових запізнювань сигналів. Це досягається тим, що в кореляційну диференціальну систему вирівнювання часових запізнювань сигналів, що надходять від одного джерела G по двох каналах К1 і К2 (Фіг.1), яка містить блок 1 постійної затримки, корелятори 2 і 3, що складаються відповідно з помножувачів 4 і 5 і фільтрів 6 і 7, що згладжують, блоки 8 і 9 часової затримки на ∆τ, віднімальний пристрій 10, підсилювач-перетворювач 11, виконавчий елемент 12, блок 13 управляємої затримки, введений розімкнутий компенсаційний зв'язок по завдавальному впливу, що містить корелятори 14 і 15, що складаються відповідно з помножувачів 16 і 17 і фільтрів 18 і 19, що згладжують, блоки 20 і 21 часової затримки на ∆τ, віднімальний пристрій 22, підсилювач-перетворювач 23 і сумуючий пристрій 24, тобто тим, що кореляційна диференціальна система з принципом управління по відхиленню перетвориться в комбіновану кореляційну систему з розімкнутим зв'язком по різниці часових запізнювань сигналів. На Фіг.1 зображена функціональна схема комбінованої кореляційної диференціальної системи вирівнювання часових запізнювань сигналів; на Фіг.2 - екстремальні кореляційні функції кореляторів замкнутої частини системи і статична характеристика цих кореляторів із пристроєм, що віднімає; на Фіг.3 - екстремальні кореляційні функції кореляторів розімкнутого зв'язку по завдавальному впливу - різниці часових запізнювань ∆τвх сигналів і статична характеристика цих кореляторів разом із пристроєм, що віднімає. Комбінована кореляційна диференціальна система вирівнювання часових запізнювань сигналів працює в такий спосіб. Екстремальні кореляційні характеристики кореляторів 2 і 3 за допомогою блоків 8 і 9 постійної затримки на ∆τ зрушені по осі τу на -∆τ і +∆τ щодо точки τу=∆τвх (Фіг.2). При зміні різниці ∆τвх часового запізнювання сигналів виникає помилка ∆τ0=∆τвх-τу, яка на виході віднімального пристрою 10, згідно Фіг.2, перетвориться в напругу помилки U10=∆R(∆τвх),яка пропорційна помилці ∆τ0. З напруги помилки U10 за допомогою підсилювача-перетворювача 11 і виконавчого елемента 12 формується вплив µ, який управляє і який надходить на блок управляємої затримки 13 та змінює час управляємої затримки τу таким чи 88528 4 ном, що помилка ∆τ0 зменшується. Однак, оскільки в замкнутій частині системи вплив µ, яким управляє, формується з напруги помилки U10, помилка ∆τ0 при зміні ∆τвх в загальному випадку не може бути зведена до нуля чи істотно зменшена. Включення блоку 20 постійної затримки забезпечує можливість досягнення рівності часів запізнювання сигналів у випадку, коли сигнал U1(t+τ1) випереджає в часі сигнал U2(t+τ2) і в цьому випадку необхідно було б виконати зрушення сигналу U2(t+τ2) в часі убік випередження, що фізично не можна реалізувати. Підвищення точності вирівнювання часових запізнювань сигналів з метою підвищення ступеня їхньої кореляції в пропонованій системі досягається за рахунок уведення розімкнутого зв'язку. Екстремальні кореляційні характеристики кореляторів 14 і 15 через блоки 20 і 21 затримки на ∆τ зрушені по осі ∆τвх на -∆τ і +∆τ щодо точки ∆τвх=0. При зміні ∆τвх на виході віднімального пристрою 22 виникає напруга U22=R(∆τвх) (Фіг.3), яка пропорційна ∆τвх. За допомогою підсилювачаперетворювача 23 з напруги U22 шляхом відповідного перетворення формується вихідна напруга U23 розімкнутого зв'язку. Таким чином, за допомогою розімкнутого зв'язку виміряється різниця ∆τвх часових запізнювань сигналів і відповідним чином ця різниця перетвориться у вихідну напругу U23 розімкнутого каналу. Напруга U23 подається на сумуючий пристрій 24, де складається з напругою U11, яка сформована з напруги помилки U10 замкнутої частини системи, і вплив µ, який управляє, формується не тільки з напруги помилки U10, як у системі-прототипі, а із суми напруг U11 і U23. Завдяки цьому напруга помилки зменшується. Синтез розімкнутого зв'язку (підсилювачаперетворювача 23) можна виконати відповідно до умови підвищення динамічної точності за рахунок відповідного підвищення порядку астатизму системи [5], а також відповідно до умови підвищення показників якості перехідних процесів, наприклад, за рахунок мінімізації квадратичної інтегральної оцінки, компенсації повільно загасаючих компонент перехідного процесу [5] чи за допомогою інших методів, тому що введення розімкнутого зв'язку не впливає на стійкість замкнутої частини системи. Зіставлення з прототипом показує, що пристрій, що заявляється, відрізняється наявністю компенсаційного розімкнутого зв'язку, за допомогою якого виміряється різниця часових запізнювань ∆τвх сигналів і виробляється напруга, що є відповідної функцією від ∆τвх, і тим самим відповідає критерію винаходу «новизна». Порівняння винаходу з іншими технічними рішеннями, відомими в науці і техніці, показує, що відомі кореляційні диференціальні системи вирівнювання часових запізнювань сигналів, у яких зменшується різниця часових запізнювань сигналів на величину управляємої затримки τу. Однак управляючий вплив у цих системах формується з напруги помилки ∆τ0=∆τвх-τу і тому помилка принципово не може бути цілком усунута. Якщо кореляційна система є статичною, то вона має кінцеву 5 неузгодженість у сталому режимі при східчастій зміні ∆τвх, а при лінійному і більш складному законі зміни ∆τвх неузгодженість прагне до нескінченності. Якщо кореляційна система має астатизм першого порядку, то неузгодженість має кінцеве значення при лінійній зміні завдавального впливу ∆τвх, а при зміні завдавального впливу за квадратичним законом неузгодженість прагне до нескінченності. Подальше збільшення порядку астатизму з метою підвищення динамічної точності приводить до втрати стійкості системи. У запропонованій комбінованій кореляційній диференціальній системі вирівнювання часових запізнювань сигналів напруга, яка управляє і яка надходить на виконавчий елемент, формується із суми напруги неузгодженості замкнутої частини системи-прототипа і напруги з виходу розімкнутого зв'язку по задавальному впливу, що є визначеною функцією цього впливу. Завдяки цьому напруга неузгодженості зменшується. Уведення розімкнутого зв'язку по задавальному впливу не впливає на стійкість замкнутої частини системи і тому синтез цього зв'язку можна виконувати відповідно до тої чи іншої умови підвищення точності кореляцій 88528 6 ної системи, не піклуючись про її стійкість. Зокрема, при відповідному виборі параметрів цього зв'язку (параметрів підсилювача-перетворювача 23) можна домогтися збільшення порядку астатизму системи, а отже, підвищення динамічної точності, а також підвищення показників якості перехідних процесів. Це дозволяє зробити висновок про відповідність технічного рішення критерію "істотні відмінності". Джерела інформації: 1. Козубовский С.Ф. Корреляционные экстремальные системы. Киев.: Наук.думка.1973. - 224с. 2. Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. - М: Сов.радио, 1974. - 392с. 3. Butterfield M.H., Bruant E.F. Dowsing J. A new method of stripspeed measurements using randomwaveform corieelstion. // Transactions of the Society of Instrument Technologu. - 1961. - 13, №2. 4. Радиоавтоматика, том 2. Зайцев Г.Ф., Арсеньев Г.Н., Кривуца В.Г., Булгач В.Л. - Киев, ООО "ДВК", 2004. - 476с. (с.385-386). 5. Зайцев Г.Ф. Синтез следящих систем высокой точности. - Киев.: Техника, 1971. - 204с. 7 Комп’ютерна верстка А. Рябко 88528 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCombined correlation differential system of leveling time delays of signals
Автори англійськоюZaitsev Hryhorii Frolovych, Krivutsa Volodymyr Heorhiiovych, Bulhach Viktor Leonardovych, Hradoboieva Nelia Viktorivna
Назва патенту російськоюКомбинированная корреляционная дифференциальная система выравнивания временных запаздываний сигналов
Автори російськоюЗайцев Григорий Фролович, Кривуца Владимир Георгиевич, Булгач Виктор Леонардович, Градобоева Неля Викторовна
МПК / Мітки
МПК: G06F 11/00, G05B 11/01
Мітки: запізнювань, кореляційна, комбінована, сигналів, вирівнювання, диференційна, система, часових
Код посилання
<a href="https://ua.patents.su/4-88528-kombinovana-korelyacijjna-diferencijjna-sistema-virivnyuvannya-chasovikh-zapiznyuvan-signaliv.html" target="_blank" rel="follow" title="База патентів України">Комбінована кореляційна диференційна система вирівнювання часових запізнювань сигналів</a>
Кореляційна система з диференціальним зв’язком вирівнювання часових запізнювань сигналів
Номер патенту: 87248
Опубліковано: 25.06.2009
Автори: Доля Олег Миколайович, Градобоєва Неля Вікторівна, Булгач Віктор Леонардович, Зайцев Григорій Фролович
МПК: G01S 7/40
Мітки: сигналів, диференціальним, запізнювань, часових, зв'язком, кореляційна, вирівнювання, система
Формула / Реферат:
Кореляційна система з диференціальним зв'язком вирівнювання часових запізнювань сигналів, що надходять від одного джерела по двох каналах, у першому з яких включений блок постійної затримки, вихід якого підключений до першого виходу системи, а також з'єднаний через перший блок затримки на ∆τ з першим входом першого корелятора і безпосередньо з першим входом другого корелятора, перший і другий корелятори складаються з послідовно...
Система прогнозування часових рядів фінансово-економічних показників
Номер патенту: 45536
Опубліковано: 15.04.2002
Автори: Ходоренко Юрій Сільвестрович, Красін Леонід Абрамович, Садовніков Олександр Олексійович, Бурдюк Ігор Володимирович
МПК: G06Q 90/00
Мітки: фінансово-економічних, часових, рядів, показників, система, прогнозування
Формула / Реферат:
Система прогнозування часових рядів фінансово-економічних показників, яка містить в собі послідовно з'єднані блок пам'яті для зберігання багатомірних часових рядів даних, блок інтерактивного завдання вихідних даних для здійснення вибирання потрібного одномірного часового ряду по запиту користувача, блок вибирання необхідних для прогнозування даних за ретроспективний період часу, блок інтерактивного завдання періоду прогнозування, блок...
Пристрій для багатоканального магнітного запису та відтворення сигналів з корекцією часових спотворень

Номер патенту: 15545
Опубліковано: 30.06.1997
Автори: Паламарчук Сергій Михайлович, Мєстечкіна Галина Донівна, Макаренко Володимир Васильович, Подтепа Віктор Олексійович
МПК: G11B 20/22
Мітки: часових, багатоканального, запису, відтворення, магнітного, спотворень, сигналів, пристрій, корекцією
Формула / Реферат:
Устройство для многоканальной магнитной записи и воспроизведения сигналов с коррекцией временных искажений, содержащее в каждом канале воспроизведения последовательно соединенные блок воспроизведения информационного и опорного сигналов, первый фильтр нижних частот, линию задержки, аналого-цифровой преобразователь, буферный накопитель, первый цифроаналоговый преобразователь, буферный накопитель, первый цифроаналоговый преобразователь и второй...
Комбінована машина для вирівнювання поверхні і оброблення грунту
Номер патенту: 19266
Опубліковано: 25.12.1997
Автори: Полушкін Олексій Володимирович, Панкова Тамара Іллінічна, Миргород Михайло Якович, Сегеда Іван Васильович, Лібінсон Ігор Юхимович, Бернасовський Костянтин Костянтинович, Журавльов Григорій Павлович, Маковецький Олег Андрійович, Глуховський Владіслав Станіславович
МПК: A01B 49/02, A01B 31/00
Мітки: оброблення, машина, комбінована, грунту, поверхні, вирівнювання
Формула / Реферат:
1. Комбинированная машина для выравнивания поверхности и обработки почвы, содержащая раму с опорными колесами, смонтированное на ней выравнивающее устройство, выполненное в виде плоского подрезающего ножа, закрепленного к меньшей полке неравнобокого угольника под острым углом к горизонтальной плоскости, и установленные на раме посредством параллелограмных механизмов рабочие органы для внесения гербицидов, подпружиненные зубья, и прутковые...
Пристрій для багатоканального магнітного запису та відтворення сигналів з корекцією часових викривлень
Номер патенту: 13326
Опубліковано: 28.02.1997
Автори: Подтепа Віктор Олексійович, Паламарчук Сергій Михайлович, Мєстєчкіна Галина Донівна, Макаренко Володимир Васильович
МПК: G11B 20/22
Мітки: корекцією, сигналів, часових, магнітного, відтворення, пристрій, викривлень, багатоканального, запису
Формула / Реферат:
(57) Устройство для многоканальной магнитной записи и воспроизведения сигналов с коррекцией временных искажений, содержащее генератор опорного сигнала, усилитель записи опорного сигнала, выходом подключенный к головке записи опорного сигнала, в каждом канале записи информационного сигнала - входную шину информационных сигналов, соединенную через усилитель записи информационного сигнала с головкой записи информационного сигнала,...
Попередній патент: Спосіб виробництва катанки на безперервному дротовому стані
Наступний патент: Шихта для виготовлення високоглиноземистих вогнетривів
Випадковий патент: Спосіб визначення фактичної межі вогнестійкості несучих стін в умовах пожежі