Верстат-гексапод
Номер патенту: 88988
Опубліковано: 10.04.2014
Автори: Валявський Іван Анатолійович, Вахніченко Руслан Володимирович, Павленко Іван Іванович, Вахніченко Дмитро Володимирович
Формула / Реферат
Верстат-гексапод, що складається з нерухомої платформи рухомої платформи, які шарнірно зв'язані кінематичними ланками змінної довжини, робочого столу, змонтованого на платформі, робочий стіл складається з нерухомої платформи, кінематичних ланок та рухомої платформи із заготовкою, на рухомій платформі змонтована шпиндельна головка, яка складається з нерухомої платформи, кінематичних ланок та рухомої платформи, де встановлюється інструмент, який відрізняється тим, що робочий стіл виконаний за схемою гексаподу, що надає заготовці додатково шість координатних рухів.
Текст
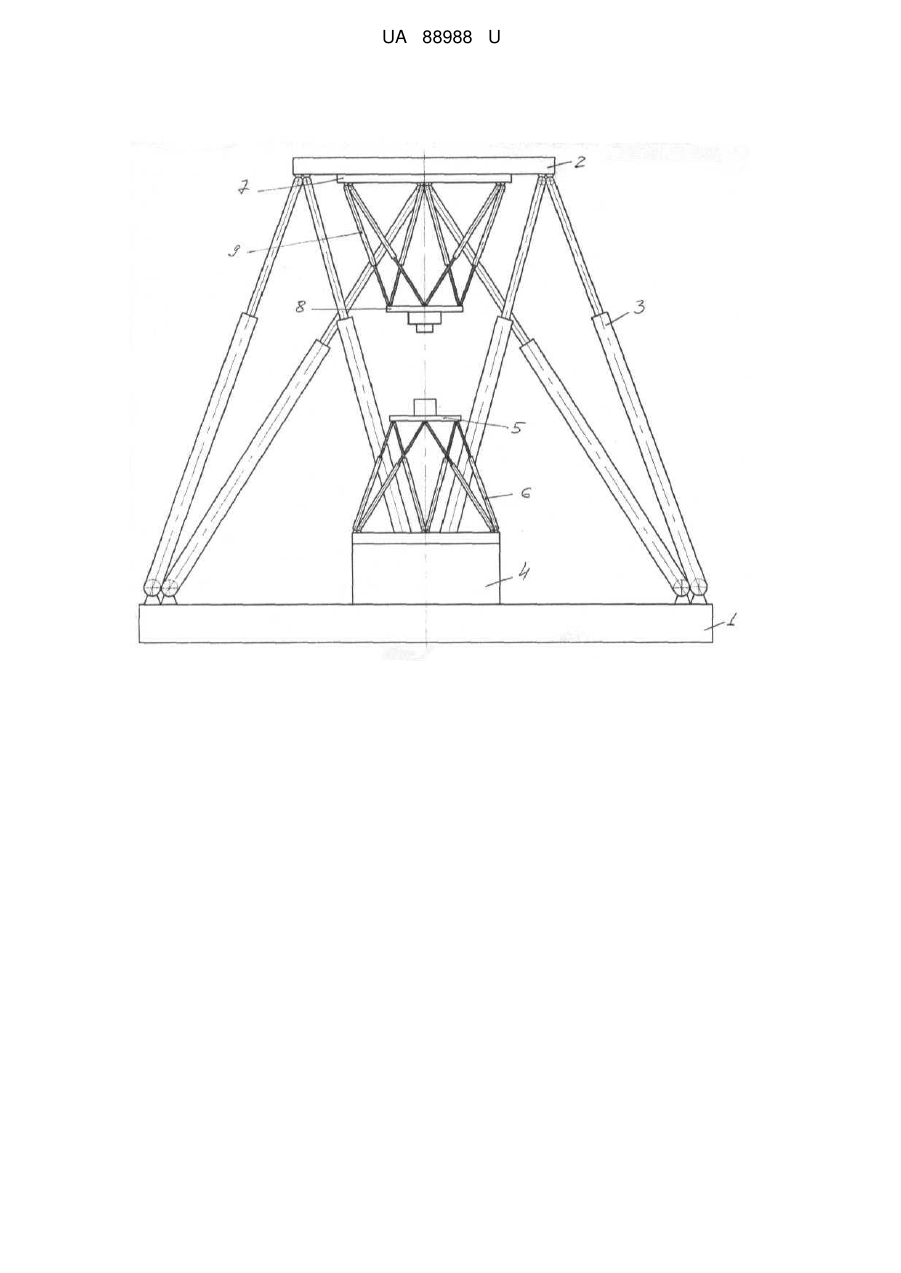
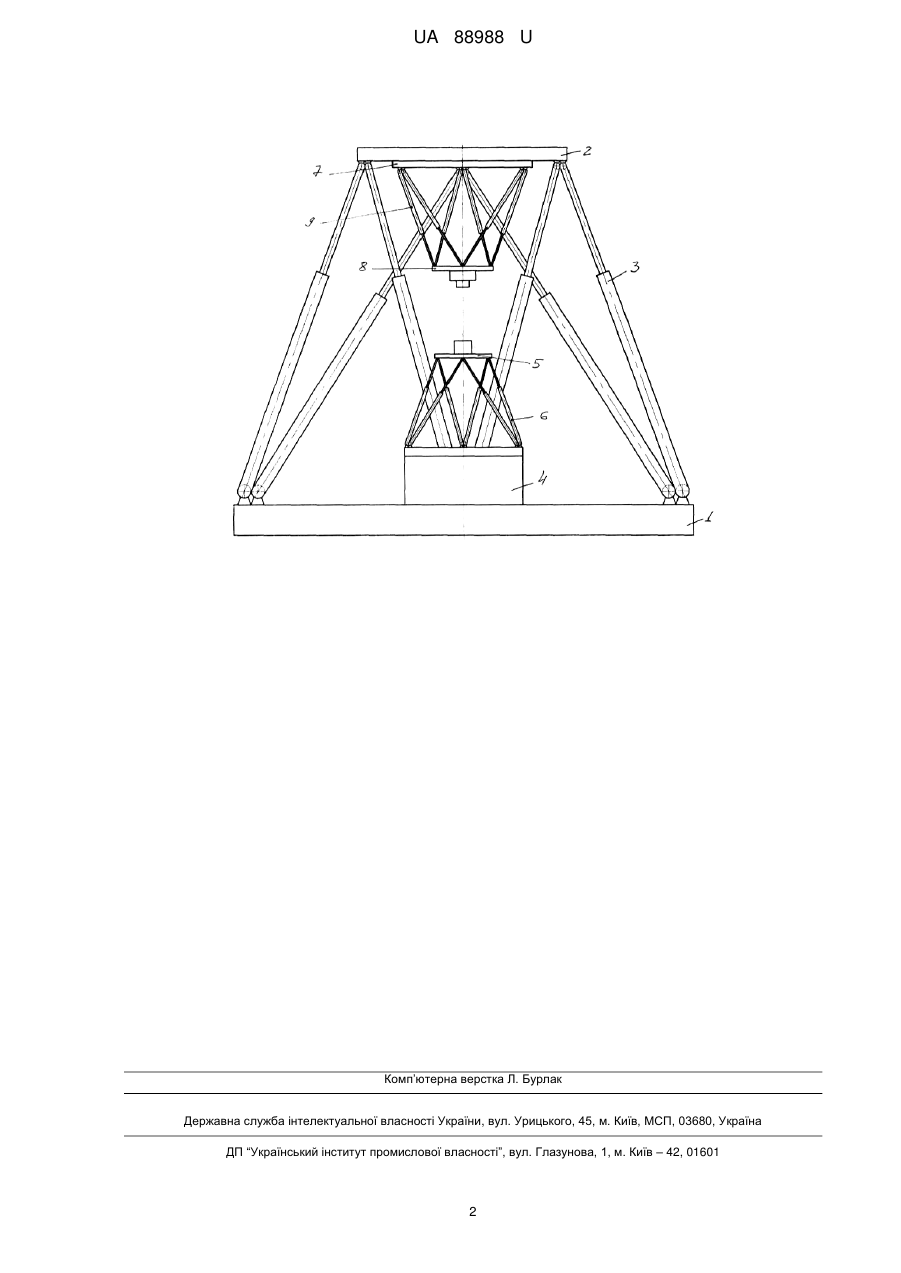
Реферат: Верстат-гексапод складається з нерухомої платформи рухомої платформи, які шарнірно зв'язані кінематичними ланками змінної довжини, робочого столу, змонтованого на платформі, робочий стіл складається з нерухомої платформи, кінематичних ланок та рухомої платформи із заготовкою, на рухомій платформі змонтована шпиндельна головка, яка складається з нерухомої платформи, кінематичних ланок та рухомої платформи, де встановлюється інструмент. Робочий стіл виконаний за схемою гексаподу, що надає заготовці додатково шість координатних рухів. UA 88988 U (54) ВЕРСТАТ-ГЕКСАПОД UA 88988 U UA 88988 U 5 10 15 20 25 30 35 Корисна модель належить до галузі верстатобудування, а саме до технологічного обладнання з паралельною кінематикою. Як найближчий аналог відомий верстат-гексапод, який складається з нерухомої платформи з робочим столом, рухомої платформи, на якій змонтована шпиндельна головка та шести кінематичних ланок змінної довжини, шпиндельна головка складається з нерухомої та рухомої платформ, що шарнірно зв'язані шістьма кінематичними ланками змінної довжини. При одночасній (паралельній) зміні довжини кінематичних ланок верстата та кінематичних ланок шпиндельної головки за відповідним законом інструмент реалізує необхідні формоутворюючі рухи. [1] Недоліком відомого верстата-гексаподу є недостатня кількість координатних рухів інструмента необхідних для обробки складних фасонних поверхонь деталей, що обмежує його технологічні можливості. В основу корисної моделі поставлена задача розширення технологічних можливостей верстата-гексаподу. Поставлена задача вирішується за рахунок того, що застосовується робочий стіл, виконаний за схемою гексаподу, що надає заготовці додатково шість координатних рухів. Суть корисної моделі пояснюється кресленням. Верстат-гексапод складається з нерухомої платформи 1 рухомої платформи 2, які шарнірно зв'язані кінематичними ланками змінної довжини 3, робочого столу змонтованого на платформі 1, робочий стіл складається з нерухомої платформи 4, кінематичних ланок 6 та рухомої платформи 5 із заготовкою, на рухомій платформі 2 змонтована шпиндельна головка, яка складається з нерухомої платформи 7, кінематичних ланок 9 та рухомої платформи 8, де встановлюється інструмент. Принцип дії верстата-гексаподу наступний. Оброблювана заготовка базується на робочому столі 5, відповідний інструмент закріплюється у шпиндельній головці виконавчого органа 8. Отже при одночасній узгодженій зміні довжин кінематичних ланок рухомої платформи 2, виконавчого органа 8 та робочого столу 5, інструмент та заготовка можуть реалізувати вісімнадцять координатних рухів відносно один до одного, що значно розширює технологічні можливості верстата. Відмінність запропонованої корисної моделі верстата-гексаподу полягає в тому, що сукупність основних ознак надає йому нові, невідомі раніше властивості - розширення його технологічних можливостей шляхом застосування шести координатної шпиндельної головки. Верстат-гексапод запропонованої компоновки може знайти широке використання у машинобудуванні при формоутворенні складних фасонних деталей без їх переустановлення. Використані джерела: 1. Патент України № 63432 від 10.10.2011р. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Верстат-гексапод, що складається з нерухомої платформи рухомої платформи, які шарнірно зв'язані кінематичними ланками змінної довжини, робочого столу, змонтованого на платформі, робочий стіл складається з нерухомої платформи, кінематичних ланок та рухомої платформи із заготовкою, на рухомій платформі змонтована шпиндельна головка, яка складається з нерухомої платформи, кінематичних ланок та рухомої платформи, де встановлюється інструмент, який відрізняється тим, що робочий стіл виконаний за схемою гексаподу, що надає заготовці додатково шість координатних рухів. 1 UA 88988 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюPavlenko Ivan Ivanovych, Valiavskyi Ivan Anatoliiovych, Vakhnichenko Dmytro Volodymyrovych
Автори російськоюПавленко Иван Иванович, Валявский Иван Анатольевич, Вахниченко Дмитрий Владимирович
МПК / Мітки
МПК: B23Q 1/00
Мітки: верстат-гексапод
Код посилання
<a href="https://ua.patents.su/4-88988-verstat-geksapod.html" target="_blank" rel="follow" title="База патентів України">Верстат-гексапод</a>
Верстат-гексапод
Номер патенту: 63437
Опубліковано: 10.10.2011
Автори: Валявський Іван Анатолійович, Вахніченко Дмитро Володимирович, Павленко Іван Іванович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи з робочим столом, рухомої платформи, на якій змонтована шпиндельна головка, та шести кінематичних ланок змінної довжини, що шарнірно з'єднують рухому і нерухому платформи, робочий стіл виконаний за схемою гексапода і складається з нерухомої і рухомої платформ, які також шарнірно зв'язані кінематичними ланками змінної довжини, який відрізняється тим, що застосовується робочий стіл,...
Верстат-гексапод
Номер патенту: 63432
Опубліковано: 10.10.2011
Автори: Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович, Павленко Іван Іванович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи з робочим столом, рухомої платформи, на якій змонтована шпиндельна головка, та шести кінематичних ланок змінної довжини, шпиндельна головка складається з нерухомої та рухомої платформ, що шарнірно зв'язані шістьма кінематичними ланками змінної довжини, який відрізняється тим, що використовується шпиндельна головка, виконана за схемою гексапод, що надає інструменту додатково шість...
Багатоцільовий верстат-гексапод
Номер патенту: 63433
Опубліковано: 10.10.2011
Автори: Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович, Павленко Іван Іванович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод, багатоцільовий
Формула / Реферат:
Багатоцільовий верстат-гексапод, що складається з нерухомої платформи, на якій розташована рухома платформа, призначена для закріплення та надання заготовці шести координатних рухів, і рухома платформа - для інструмента, який також реалізує шість координатних рухів, рухома платформа зв'язана з основою шістьма кінематичними ланками змінної довжини, а друга рухома платформа - з'єднана шістьма кінематичними ланками, який відрізняється тим, що...
Верстат-гексапод
Номер патенту: 63442
Опубліковано: 10.10.2011
Автори: Вахніченко Дмитро Володимирович, Павленко Іван Іванович, Валявський Іван Анатолійович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з основи, трьох штанг, кільця та платформи, з'єднаних шістьма додатковими напрямними у формі конічної стрижневої ферми, шести опорних шарнірів, виконавчого органа з відповідним інструментом і шести кінематичних ланок змінної довжини, на основі змонтований робочий стіл з оброблюваною деталлю, який відрізняється тим, що кінематичні ланки, які з'єднують напрямні, розташовані на нерухомій основі з рухомим...
Верстат-гексапод
Номер патенту: 54937
Опубліковано: 17.03.2003
Автори: Крижанівський Володимир Андрійович, Валявський Іван Анатолійович
МПК: B21D 5/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, який складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами, який відрізняється тим, що шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі.
Попередній патент: Опорний шарнір
Наступний патент: Спосіб виготовлення мезопористих матеріалів на основі оксидів
Випадковий патент: Рідкокристалічний модулятор оптичного випромінювання