Пристрій для керування асинхронним електродвигуном з фазним ротором
Номер патенту: 8977
Опубліковано: 30.09.1996
Автори: Колчев Євген Васильович, Корнієнко Анатолій Прокопович, Бєльков Валерій Аркадьович, Чепак Анатолій Олексійович, Полякова Віра Хомінічна, Латишенок Володимир Іванович, Саблін Вадим Дмитрович, Ржевський Євген Анатольович
Формула / Реферат
Устройство для управления асинхронным электродвигателем с фазным ротором по авт. св. №1131010, отличающееся тем, что, с целью повышения надежности, в него дополнительно введены трехфазный датчик тока и четырехплечий мост, а элемент сравнения снабжен дополнительным информационным входом, вход трехфазного датчика тока предназначен для включения в фазы статорной обмотки электродвигателя, а его выход подключен к одной диагонали четырехплечего моста, другая диагональ которого подключена к дополнительному информационному входу элемента сравнения.
Текст
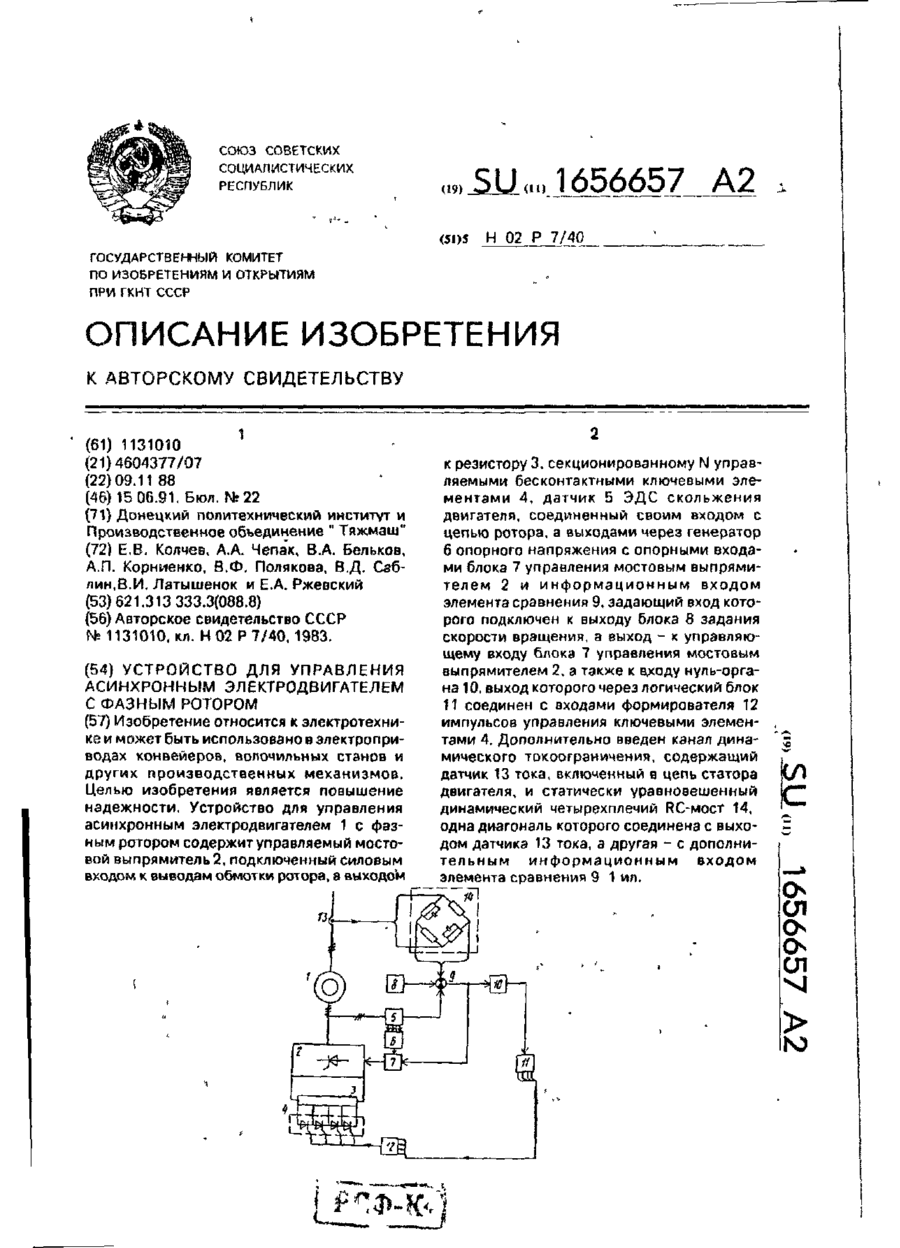
Изобретение относится к электротехнике и может быть использовано в электроприводах конвейеров, волочильных станов и других производственных механизмов. Целью изобретения является повышение надежности. Устройство для управления асинхронным электродвигателем 1 с фазным ротором содержит управляемый мостовой выпрямитель 2, подключенный силовым входом к выводам обмотки ротора, а выходом к резистору 3, секционированному N управляемыми бесконтактными ключевыми элементами 4, датчик 5 ЭДС скольжения двигателя, соединенный своим входом с цепью ротора, а выходами через генератор 6 опорного напряжения с опорными входами блока 7 управления мостовым выпрямителем 2 и информационным входом элемента сравнения 9, задающий вход которого подключен к выходу блока 8 задания скорости вращения, а выход - к управляющему входу блока 7 управления мостовым выпрямителем 2, а также к входу нуль-органа 10, выход которого через логический блок 11 соединен с входами формирователя 12 импульсов управления ключевыми элементами 4. Дополнительно введен канал динамического токоогрэиичения, содержащий датчик 13 тока, включенный в цепь статора двигателя, и статически уравновешенный динамический четырехплечий RC-MOCT 14, одна диагональ которого соединена с выходом датчика 13 тока, а другая - с дополнительным информационным входом элемента сравнения 9 1 ил. ел С о» ел о» О* ел ю 1656657 Изобретение относится к электротехнике и можот быть использовано в электроприводах ленточных конвейеров, волочильных станов и других производственных механизмов. 5 Целью изобретения является повыше- ние надежности. На чертеже изображена функциональная схема устройства для управления асинхронным электродвигателем с фазным 10 ротором. Устройство для управления асинхронным электродвигателем 1 с фазным ротором содержит управляемый мостовой выпрямитель 2, подключенный силовым входом к 15 выводам обмотки ротора, а выходом - к резистору 3, секционированному N управляемыми ключевыми элементами 4 , ; выполненными на тиристорах, датчик ЭДС 5 скольжения, соединенный своим входом с 20 цепью ротора, а одним выходом через гене- ± ратор б пилообразных напряжений подключен к опорным входам блока 7 управления мостовым выпрямителем 2. Блок 8 задания частоты вращения выходом подключен к 25 входу элемента 9 сравнения, информационный вход которого соединен с другим выходом датчика ЭДС 5 скольжения, выход элемента сравнения 9 соединен с входами блока 7 управления мостовым выпрямителем и нуль-органа 10, выход которого под- 30 ключен к логическому блоку 11, выход которого подключен к входу формирователя 12 управляющих импульсов ключевыми элементами 4. Трехфазный датчик 13 входом предназначен для включения в фазы статор- 35 ной обмотки, а его выход подключен к одной диагонали четырехплечного RC-моста 14, другая диагональ моста 14 подключена к дополнительному информационному входу 40 элемента 9 сравнения. импульсов с длительностью, пропорциональной результирующему управляющему сигналу. В момент подачи напряжения на статор неподвижного двигателя 1 величина результирующего управляющего сигнала равна нулю, управляющие импульсы на выходе блока 7 управления мостовым выпрямителем не вырабатываются и мостовой выпрямитель 2 закрыт. Ток ротора двигателя 1 равен нулю, а следовательно, отсутствует и крутящий момент. При изменении выходного напряжения блока 8 задания частоты вращения увеличивается разность приходящих к элементу 9 сравнения сигналов, появляются управляющие импульсы на выходе блока 7 и тиристоры выпрямителя 2 открываются, обеспечивая плавное нарастание тока ротора и момента двигателя 1. Нарастание продолжается до трогания ротора, затем следует разгон двигателя с темпом, задаваемым блоком 8. При максимальном значении результирующего сигнала на выходе элемента 9 сравнения угол управления тиристоров моста 2 равен нулю и нуль-орган 10 формирует управляемый сигнал для блока 11. Последний, воздействуя на формирователь 12, обуславливает появление на его выходе управляющего импульса для первого тиристора управляемых ключевых элементов 4, шунтирующего первую секцию резистора 3, и двигатель переходит с первой на вторую пусковую характеристику. Переход сопровождается динамическим броском тока статора, который с помощью датчика 13 тока и емкостей моста 14 трансформируется в сигнал обратной связи на входе элемента 9 сравнения. Результирующее выходное напряжение последнего резко снижается, Устройство работает следующим обрамост 2 подзапирается, подавляя динамичезом. ский бросок тока, э следовательно, и моменНа статор электродвигателя 1 подается та двигателя. напряжение питающей сети, в результате 45 При дальнейшем разгоне двигателя вычего с выхода датчика 5 ЭДС скольжения - ходное напряжение элемента 9 сравнения подается сигнал на входы генератора 6 пивозрастает и, достигнув максимума, полнолообразных напряжений. С выхода последстью открывает выпрямитель 2. Нуль-орган него напряжение пилообразной формы 10 вырабатывает следующий управляющий подается на блок 7 управления мостовым 50 сигнал и на выходе формирователя 12 появвыпрямителем 2, где складывается с выходляется управляющий импульс для второго ным сигналом элемента 9 сравнения, обраиз тиристоров ключевых элементов 4, шунзующимся вычитанием из выходного тирующего вторую секцию резистора 3. напряжения блока 8 задания частоты враСнова вступает в действие канал динамичещения информационных сигналов, поступа- 55 ского токоограничения, обеспечивающий ющих на элемент сравнения с выхода плавный безударный переход двигателя с датчика ЭДС 5 скольжения и с выходной второй на третью пусковую характеристику. диагонали динамического моста 14. На выПоследующие этапы разгона протекают ходе блока 7 управления мостовым выпряаналогичноописанному до выхода двигатемителем" образуется последовательность ^ ^ ля на рабочую характеристику. Динамический мост 14 статически уравновешен, чем исключается проникновение к входу элемента 9 сравнения постоянной составляющей сигнала токовой обратный связи, что имело бы место в случае приме- -5 нения вместо моста 14 обычной последовательной RC-цепочки (из-за влияния собственной проводимости конденсатора). Величина емкостей конденсаторов моста выбирается исходя из требуемого значе- 10 ния его постоянной времени, равного 0,1 -0,15 с, чем обуславливается полное пропускание сигнала быстроизменяющихся кратковременных динамических бросков тока статора двигателя из-за малого реак- 15 тивного сопротивления конденсаторов, на слабое пропускание сигнала при медленных изменениях тока статора двигателя (в промежутках между динамическими бросками) из-за высокого реактивного сопро- 20 тивления конденсаторов. При указанном сочетании статических и динамических свойств токовой обратной Редактор Е. Копча связи последняя, реагируя лишь на динамические броски тока статора, не нарушает темпа разгона двигателя, задаваемого блоком 8, поскольку сохраняется первоначальная жесткость статических характеристик электропривода Формула изобретения Устройство для управления асинхронным электродвигателем с фазным ротором по авт.св. № 1131010, о т л и ч а ю щ е е с я тем, что, с целью повышения надежности, в него дополнительно введены трехфазный датчик тока и четырехплечий мост, а элемент сравнения снабжен дополнительным информационным входом, вход трехфазного датчика тока предназначен для включения в фазы статорной обмотки электродвигателя, а его выход подключен к одной диагонали четырехплечего моста, другая диагональ которого подключена к дополнительному информационному входу элемента сравнения. Составитель Е. Перемыслова Техред М.Моргентэл Корректор Т. Малец Заказ 2056 Тираж 362 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб.. 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice to control wound rotor-asynchronous electric motor
Автори англійськоюKolchev Yevhen Vasyliovych, Chepak Anatolii Oleksiiovych, Bielkov Valerii Arkadiiovych, Korniienko Anatolii Prokopovych, Sablin Vadym Dmytrovych, Latyshenok Volodymyr Ivanovych, Rzhevskyi Yevehn Anatoliiovych
Назва патенту російськоюУстройство для управления асинхронным электродвигателем с фазным ротором
Автори російськоюКолчев Евгений Васильевич, Чепак Аантолий Алексеевич, Бельков Валерий Аркадьевич, Корниенко Анатолий Прокофьевич, Саблин Вадим Дмитриевич, Латышенок Владимир Иванович, Ржевский Евгений Анатольевич
МПК / Мітки
МПК: H02P 25/16
Мітки: фазним, пристрій, ротором, асинхронним, керування, електродвигуном
Код посилання
<a href="https://ua.patents.su/4-8977-pristrijj-dlya-keruvannya-asinkhronnim-elektrodvigunom-z-faznim-rotorom.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування асинхронним електродвигуном з фазним ротором</a>
Спосіб керування асинхронним електродвигуном з фазним ротором і пристрій для його здійснення
Номер патенту: 8973
Опубліковано: 30.09.1996
Автори: Колчев Євген Васильович, Саблін Вадим Дмитрович, Латишенок Володимир Іванович, Пісковатськая Ольга Вікторовна, Чікалов Віталій Іванович
МПК: H02P 25/16
Мітки: спосіб, фазним, здійснення, електродвигуном, асинхронним, ротором, пристрій, керування
Формула / Реферат:
1. Способ управления асинхронным электродвигателем с фазным ротором и включенными в его цепь регулируемым и секционированным резисторами, при котором осуществляют плавное изменение регулируемого резистора по монотонно изменяющему управляющему воздействию и при достижении этой величиной нулевого значения осуществляют ступенчатое изменение значения сопротивления секционированного резистора, отличающийся тем, что, с целью повышения...
Пристрій для електродинамічного гальмування асинхронного електродвигуна з фазним ротором
Номер патенту: 7984
Опубліковано: 26.12.1995
Автори: Шустов Борис Миколайович, Кулібанов Вячеслав Іванович, Півень Іван Миколайович
МПК: H02P 3/18
Мітки: асинхронного, електродинамічного, фазним, електродвигуна, пристрій, ротором, гальмування
Формула / Реферат:
Устройство для электродинамического торможения асинхронного электродвигателя с фазным ротором, содержащее трехфазный двухпо-лупериодный выпрямительный мост, выходкоторого через коммутационный элемент подключен к двум выводам обмоток статора, а вход - к выводам обмоток ротора, и источник энергии, отличающееся тем, что в качестве источника энергии использована конденсаторная батарея, подключенная пофазно к выводам обмоток статора.
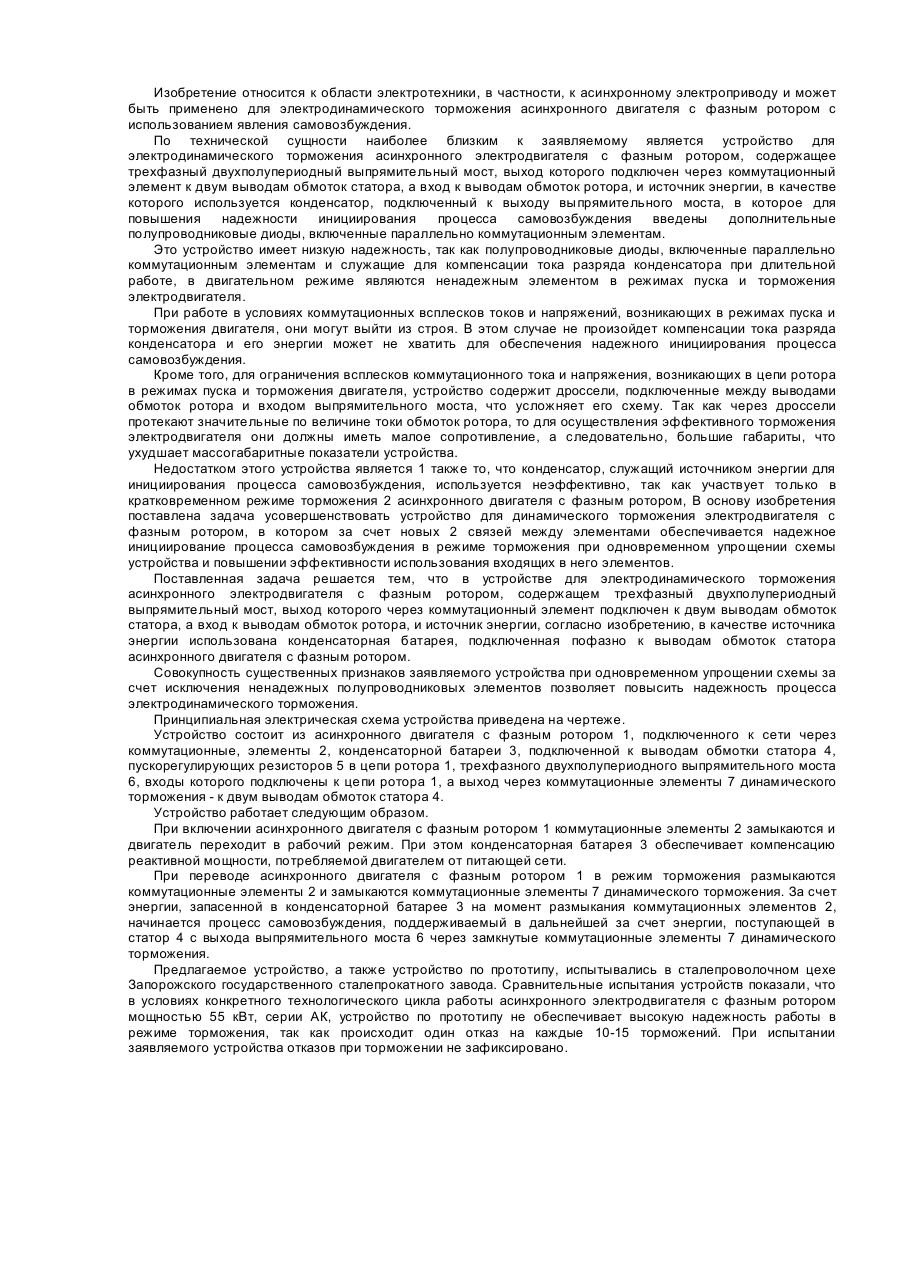
Пристрій для пуску асинхронного двигуна з фазним ротором”
Номер патенту: 4829
Опубліковано: 28.12.1994
Автори: Спікторенко Микола Федірович, Плугатар Олексій Петрович, Калюжний Володимир Владиславович, Ісаков Володимир Миколайович, Гольцев Володимир Іванович, Волков Ігор Володимирович
МПК: H02P 21/06, H02K 17/24
Мітки: ротором, асинхронного, двигуна, пуску, пристрій, фазним
Формула / Реферат:
Устройство для пуска асинхронного двигателя с фазным ротором, содержащее первый трехфазный мостовой выпрямитель, блок формирования тока роторной цепи асинхронного двигателя, точки соединения анодов и катодов диодов каждой фазы первого трехфазного мостового выпрямителя снабжены зажимамидля подключения выводов роторной обмотки асинхронного двигателя, катоды и аноды диодов первого трехфазного мостового выпрямителя объединены и подключены...
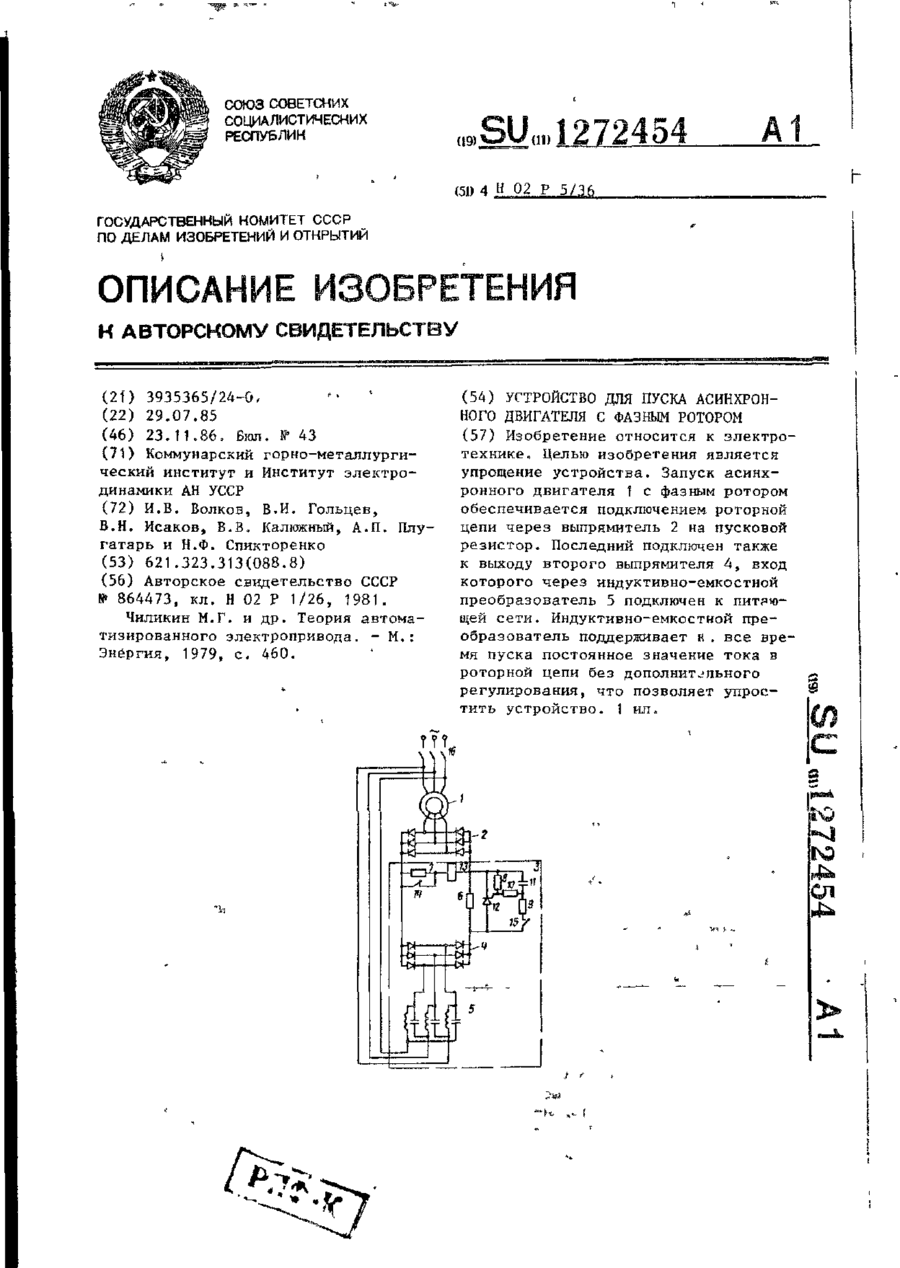
Пристрій для керування частотно-регулівним електроприводом
Номер патенту: 8822
Опубліковано: 30.09.1996
Автори: Грінченко Олександр Семенович, Волков Олександр Васильович
МПК: H02P 27/04
Мітки: частотно-регулівним, електроприводом, керування, пристрій
Формула / Реферат:
Устройство для управления частотно-регулируемым электроприводом, содержащее статический преобразователь частоты, снабженный клеммами для подключения питающей сети и асинхронного двигателя, системы управления напряжением и частотой, подключенные выходами к соответствующим управляющим входам статического преобразователя частоты, регулятор частоты и регулятора тока, каждый с двумя входами, узел задания, датчик частоты вращения, датчики тока...
Пристрій для фазового керування 2m- фазним перетворювачем
Номер патенту: 8812
Опубліковано: 30.09.1996
Автори: Сороченко Микола Іванович, Ковтуненко Анатолій Павлович
МПК: H02M 7/00
Мітки: перетворювачем, керування, фазового, фазним, пристрій
Формула / Реферат:
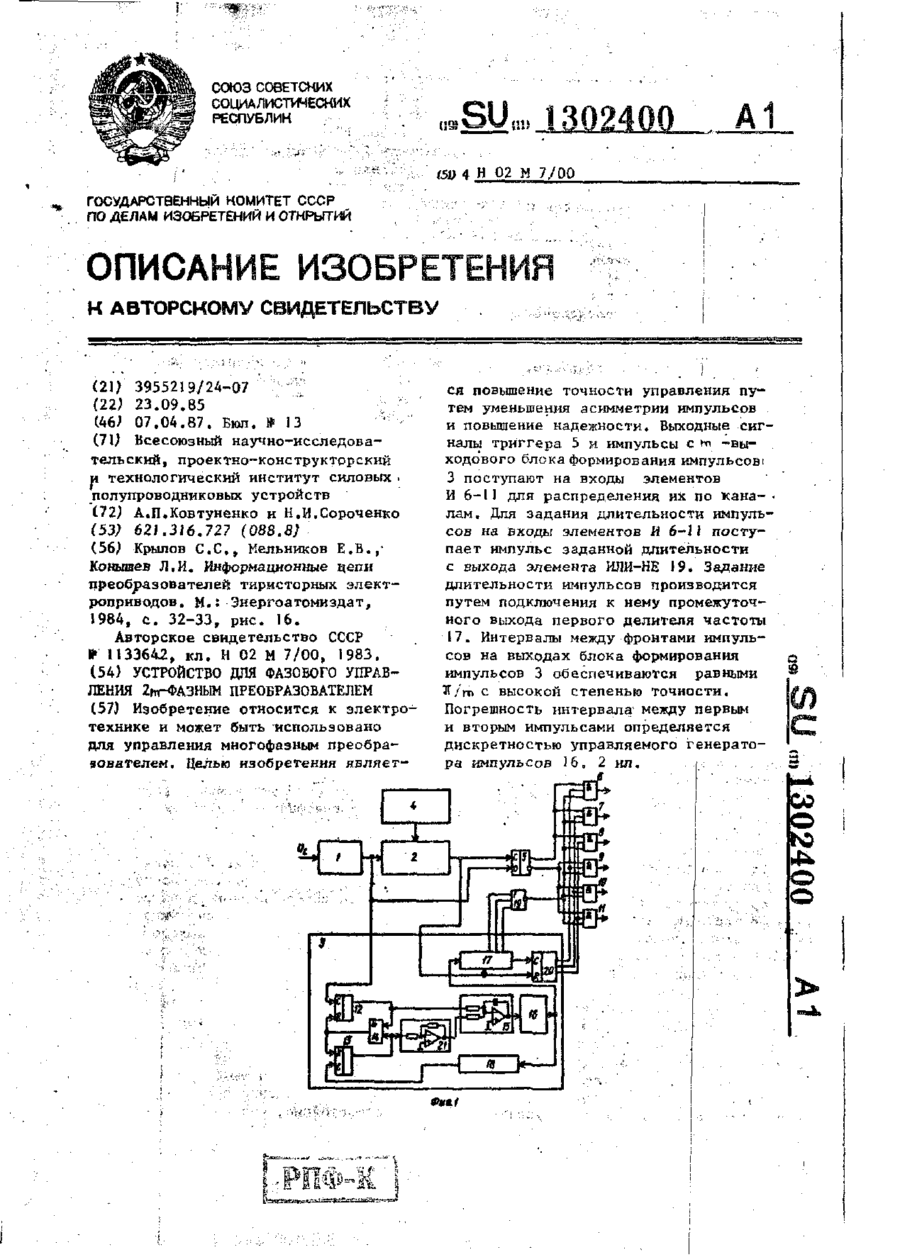
Устройство для фазового управлення 2m-фазным преобразователем, содержащее последовательно соединенные блок синхронизации, блок одноканального фазосмещения и m-ный ходовый блок формирования импульсов, причем вход блока одноканального фазосмещения предназначен для соединения с источником напряжения управления, триггер, синхронизирующий вход которого соединен с выходом блока одноканального фазосмещения, а информационный - с выходом блока...
Попередній патент: Пристрій для контроля поздовжного розриву конвейєрної стрічки
Наступний патент: Ємкость для роботи під внутрішнім надлишковим тиском
Випадковий патент: Тунельний вітродвигун