Датчик переміщень
Формула / Реферат
Датчик переміщень, що містить С-подібний постійний магніт, два ферозонди, розташовані симетрично у міжполюсному зазорі постійного магніту від осі нейтралі на відстані, що дорівнює чверті довжини його зазору, причому вихідні обмотки ферозондів з'єднані послідовно зустрічно, градієнтометр, розміщений в центрі міжполюсного простору постійного магніту та вихідні обмотки якого та ферозондів з'єднані послідовно, який відрізняється тим, що застосовано дві пари ферозондів, вихідні обмотки яких у кожній з пар увімкнені послідовно узгоджено, а кінці вихідних обмоток ферозондів, розташованих з одного боку С-подібного постійного магніту, об'єднано, при цьому обидві пари ферозондів зміщені одна відносно іншої на відстань, що дорівнює довжині міжполюсного зазору та половині ширини полюса С-подібного постійного магніту.
Текст
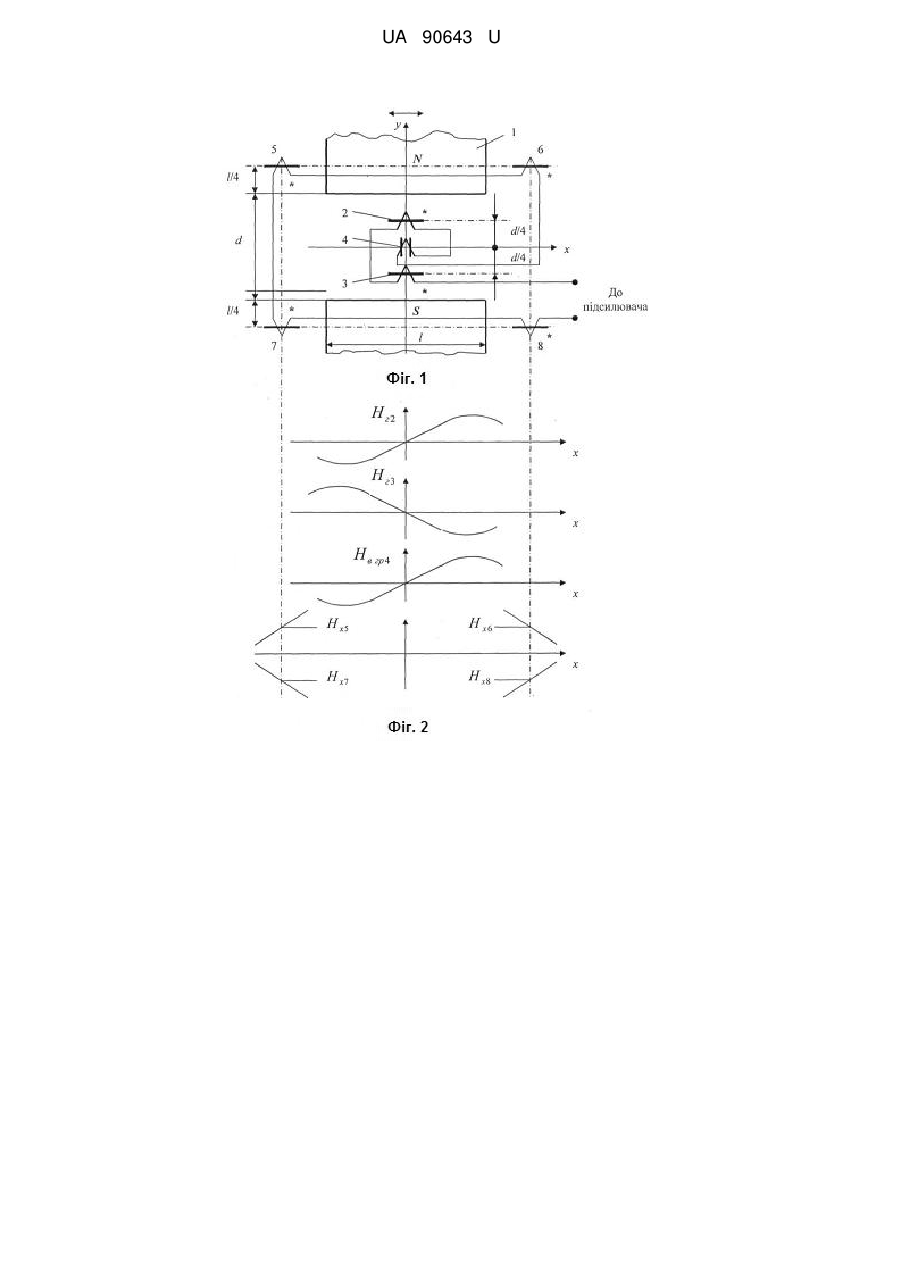
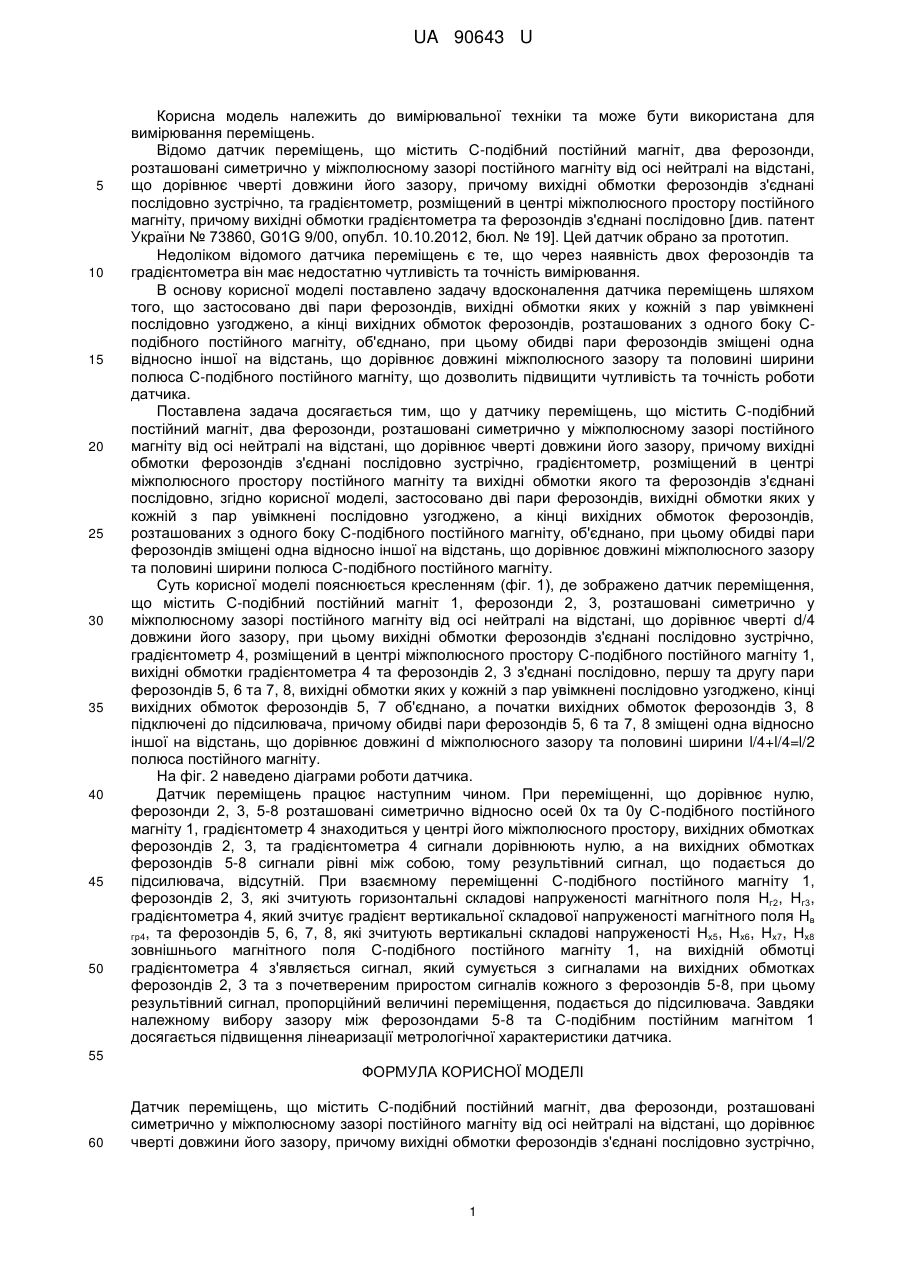
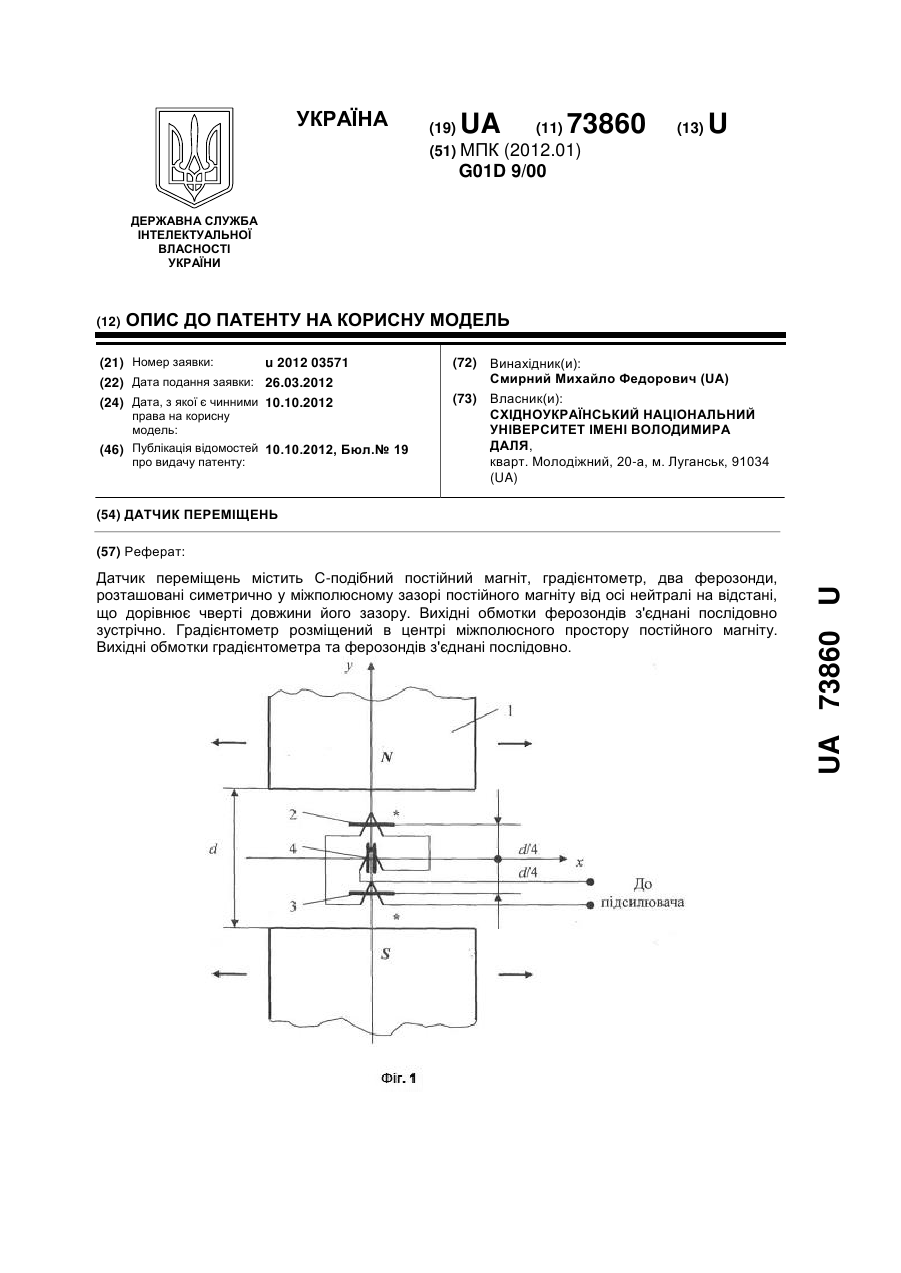
Реферат: UA 90643 U UA 90643 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання переміщень. Відомо датчик переміщень, що містить С-подібний постійний магніт, два ферозонди, розташовані симетрично у міжполюсному зазорі постійного магніту від осі нейтралі на відстані, що дорівнює чверті довжини його зазору, причому вихідні обмотки ферозондів з'єднані послідовно зустрічно, та градієнтометр, розміщений в центрі міжполюсного простору постійного магніту, причому вихідні обмотки градієнтометра та ферозондів з'єднані послідовно [див. патент України № 73860, G01G 9/00, опубл. 10.10.2012, бюл. № 19]. Цей датчик обрано за прототип. Недоліком відомого датчика переміщень є те, що через наявність двох ферозондів та градієнтометра він має недостатню чутливість та точність вимірювання. В основу корисної моделі поставлено задачу вдосконалення датчика переміщень шляхом того, що застосовано дві пари ферозондів, вихідні обмотки яких у кожній з пар увімкнені послідовно узгоджено, а кінці вихідних обмоток ферозондів, розташованих з одного боку Сподібного постійного магніту, об'єднано, при цьому обидві пари ферозондів зміщені одна відносно іншої на відстань, що дорівнює довжині міжполюсного зазору та половині ширини полюса С-подібного постійного магніту, що дозволить підвищити чутливість та точність роботи датчика. Поставлена задача досягається тим, що у датчику переміщень, що містить С-подібний постійний магніт, два ферозонди, розташовані симетрично у міжполюсному зазорі постійного магніту від осі нейтралі на відстані, що дорівнює чверті довжини його зазору, причому вихідні обмотки ферозондів з'єднані послідовно зустрічно, градієнтометр, розміщений в центрі міжполюсного простору постійного магніту та вихідні обмотки якого та ферозондів з'єднані послідовно, згідно корисної моделі, застосовано дві пари ферозондів, вихідні обмотки яких у кожній з пар увімкнені послідовно узгоджено, а кінці вихідних обмоток ферозондів, розташованих з одного боку С-подібного постійного магніту, об'єднано, при цьому обидві пари ферозондів зміщені одна відносно іншої на відстань, що дорівнює довжині міжполюсного зазору та половині ширини полюса С-подібного постійного магніту. Суть корисної моделі пояснюється кресленням (фіг. 1), де зображено датчик переміщення, що містить С-подібний постійний магніт 1, ферозонди 2, 3, розташовані симетрично у міжполюсному зазорі постійного магніту від осі нейтралі на відстані, що дорівнює чверті d/4 довжини його зазору, при цьому вихідні обмотки ферозондів з'єднані послідовно зустрічно, градієнтометр 4, розміщений в центрі міжполюсного простору С-подібного постійного магніту 1, вихідні обмотки градієнтометра 4 та ферозондів 2, 3 з'єднані послідовно, першу та другу пари ферозондів 5, 6 та 7, 8, вихідні обмотки яких у кожній з пар увімкнені послідовно узгоджено, кінці вихідних обмоток ферозондів 5, 7 об'єднано, а початки вихідних обмоток ферозондів 3, 8 підключені до підсилювача, причому обидві пари ферозондів 5, 6 та 7, 8 зміщені одна відносно іншої на відстань, що дорівнює довжині d міжполюсного зазору та половині ширини l/4+l/4=l/2 полюса постійного магніту. На фіг. 2 наведено діаграми роботи датчика. Датчик переміщень працює наступним чином. При переміщенні, що дорівнює нулю, ферозонди 2, 3, 5-8 розташовані симетрично відносно осей 0х та 0у С-подібного постійного магніту 1, градієнтометр 4 знаходиться у центрі його міжполюсного простору, вихідних обмотках ферозондів 2, 3, та градієнтометра 4 сигнали дорівнюють нулю, а на вихідних обмотках ферозондів 5-8 сигнали рівні між собою, тому результівний сигнал, що подається до підсилювача, відсутній. При взаємному переміщенні С-подібного постійного магніту 1, ферозондів 2, 3, які зчитують горизонтальні складові напруженості магнітного поля Нг2, Нг3, градієнтометра 4, який зчитує градієнт вертикальної складової напруженості магнітного поля Hв гр4, та ферозондів 5, 6, 7, 8, які зчитують вертикальні складові напруженості Нх5, Нх6, Нх7, Нх8 зовнішнього магнітного поля С-подібного постійного магніту 1, на вихідній обмотці градієнтометра 4 з'являється сигнал, який сумується з сигналами на вихідних обмотках ферозондів 2, 3 та з почетвереним приростом сигналів кожного з ферозондів 5-8, при цьому результівний сигнал, пропорційний величині переміщення, подається до підсилювача. Завдяки належному вибору зазору між ферозондами 5-8 та С-подібним постійним магнітом 1 досягається підвищення лінеаризації метрологічної характеристики датчика. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Датчик переміщень, що містить С-подібний постійний магніт, два ферозонди, розташовані симетрично у міжполюсному зазорі постійного магніту від осі нейтралі на відстані, що дорівнює чверті довжини його зазору, причому вихідні обмотки ферозондів з'єднані послідовно зустрічно, 1 UA 90643 U 5 градієнтометр, розміщений в центрі міжполюсного простору постійного магніту та вихідні обмотки якого та ферозондів з'єднані послідовно, який відрізняється тим, що застосовано дві пари ферозондів, вихідні обмотки яких у кожній з пар увімкнені послідовно узгоджено, а кінці вихідних обмоток ферозондів, розташованих з одного боку С-подібного постійного магніту, об'єднано, при цьому обидві пари ферозондів зміщені одна відносно іншої на відстань, що дорівнює довжині міжполюсного зазору та половині ширини полюса С-подібного постійного магніту. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: переміщень, датчик
Код посилання
<a href="https://ua.patents.su/4-90643-datchik-peremishhen.html" target="_blank" rel="follow" title="База патентів України">Датчик переміщень</a>
Датчик переміщень
Номер патенту: 73860
Опубліковано: 10.10.2012
Автор: Смірний Михайло Федорович
МПК: G01D 9/00
Мітки: датчик, переміщень
Формула / Реферат:
Датчик переміщень, що містить С-подібний постійний магніт, два ферозонди, розташовані симетрично у міжполюсному зазорі постійного магніту від осі нейтралі на відстані, що дорівнює чверті довжини його зазору, причому вихідні обмотки ферозондів з'єднані послідовно зустрічно, який відрізняється тим, що додатково містить градієнтометр, розміщений в центрі міжполюсного простору постійного магніту, причому вихідні обмотки градієнтометра та...
Датчик переміщень
Номер патенту: 73859
Опубліковано: 10.10.2012
Автор: Смірний Михайло Федорович
МПК: G01D 9/00
Мітки: переміщень, датчик
Формула / Реферат:
Датчик переміщень, що містить С-подібний постійний магніт, два ферозонди, розташовані симетрично у міжполюсному зазорі постійного магніту від осі нейтралі на відстані, що дорівнює чверті довжини його зазору, причому вихідні обмотки ферозондів з'єднані послідовно зустрічно, який відрізняється тим, що додатково містить дві пари ферозондів, вихідні обмотки яких увімкнені послідовно узгоджено, а кінці вихідних обмоток ферозондів, розташованих з...
Датчик переміщень
Номер патенту: 73862
Опубліковано: 10.10.2012
Автор: Смірний Михайло Федорович
МПК: G01D 9/00
Мітки: датчик, переміщень
Формула / Реферат:
Датчик переміщень, що містить два пристиковані один до одного С-подібні постійні магніти, три ферозонди, розташовані в міжполюсному зазорі С-подібних постійних магнітів, перший з яких розміщений в центрі міжполюсного зазору, другий та третій ферозонди - симетрично від нього на відстані, що дорівнює ширині полюса постійного магніту, причому вихідні обмотки ферозондів з'єднані послідовно зустрічно, який відрізняється тим, що додатково містить...
Датчик переміщень
Номер патенту: 78613
Опубліковано: 25.03.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: переміщень, датчик
Формула / Реферат:
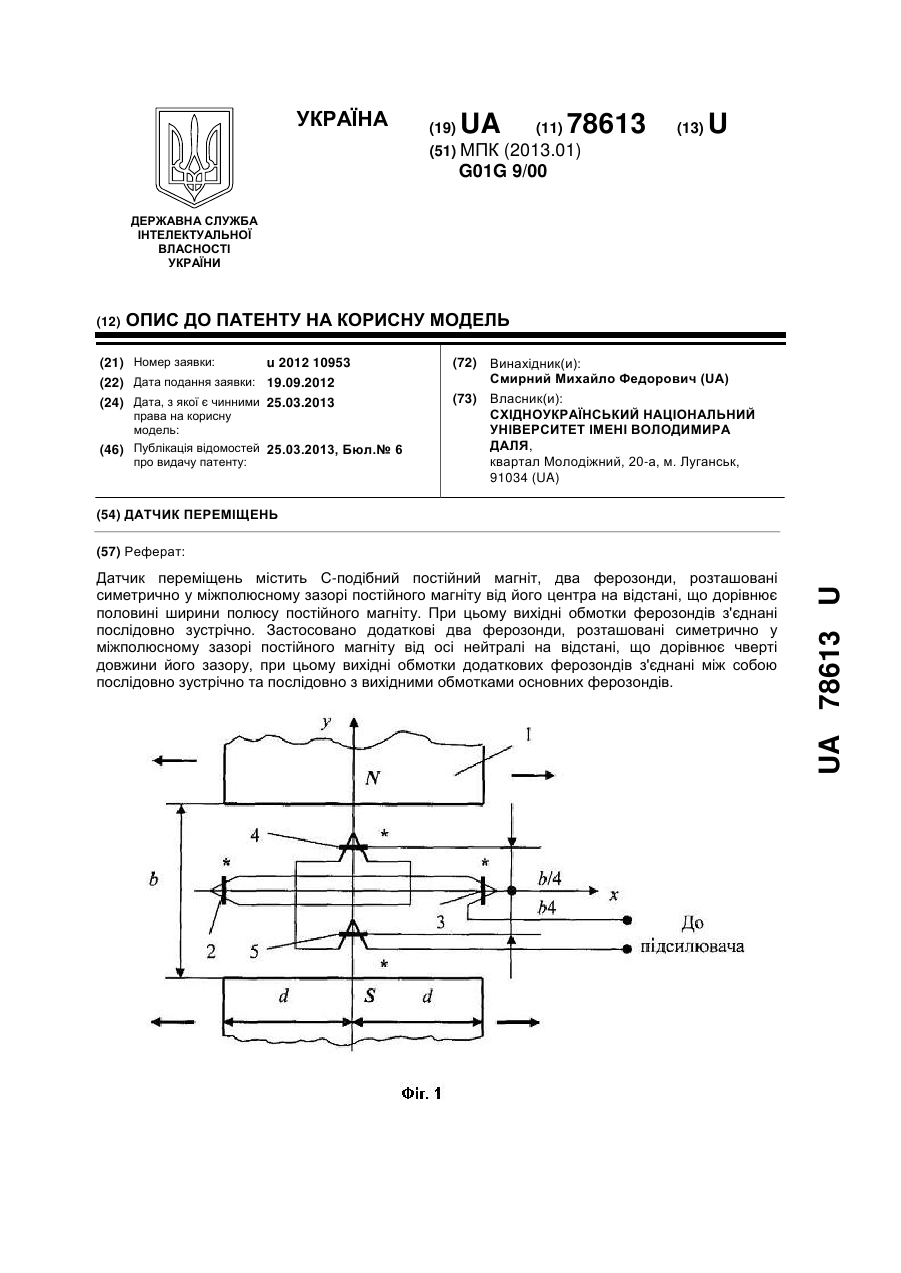
Датчик переміщень, що містить С-подібний постійний магніт, два ферозонди, розташовані симетрично у міжполюсному зазорі постійного магніту від його центра на відстані, що дорівнює половині ширини полюсу постійного магніту, при цьому вихідні обмотки ферозондів з'єднані послідовно зустрічно, який відрізняється тим, що застосовано додаткові два ферозонди, розташовані симетрично у міжполюсному зазорі постійного магніту від осі нейтралі на...
Датчик переміщень
Номер патенту: 73861
Опубліковано: 10.10.2012
Автор: Смірний Михайло Федорович
МПК: G01D 9/00
Мітки: переміщень, датчик
Формула / Реферат:
Датчик переміщень, що містить два пристиковані один до одного С-подібні постійні магніти, три ферозонди, розташовані в міжполюсному зазорі С-подібних постійних магнітів, перший з яких розміщений в центрі міжполюсного зазору, другий та третій ферозонди - симетрично від нього на відстані, що дорівнює ширині полюса постійного магніту, причому вихідні обмотки ферозондів з'єднані послідовно зустрічно, який відрізняється тим, що додатково містить...
Попередній патент: Ваговимірювальний датчик
Наступний патент: Диференціальний індуктивний датчик зусиль
Випадковий патент: Спосіб ущільнення no-компресора і розширювача залишкового газу в установці для одержання азотної кислоти та установка для одержання азотної кислоти