Диференціальний індуктивний датчик зусиль
Формула / Реферат
Диференціальний індуктивний датчик зусиль, що містить пару магнітопроводів з котушками, розміщених по один бік прохідного якоря, прохідний якір виконаний ![]() -подібної форми, ширина отвору якого дорівнює діаметру магнітопроводів з котушками, які через підсилювально-перетворювальні канали зв'язані з суматором, який відрізняється тим, що застосовано додаткові два магнітопроводи з котушками, розташовані симетрично по інший бік прохідного якоря
-подібної форми, ширина отвору якого дорівнює діаметру магнітопроводів з котушками, які через підсилювально-перетворювальні канали зв'язані з суматором, який відрізняється тим, що застосовано додаткові два магнітопроводи з котушками, розташовані симетрично по інший бік прохідного якоря ![]() -подібної форми на одних осях з основними магнітопроводами з котушками, при цьому магнітопроводи з котушками, розташовані на одних осях, через підсилювально-перетворювальні канали та суматор зв'язані з суматором.
-подібної форми на одних осях з основними магнітопроводами з котушками, при цьому магнітопроводи з котушками, розташовані на одних осях, через підсилювально-перетворювальні канали та суматор зв'язані з суматором.
Текст
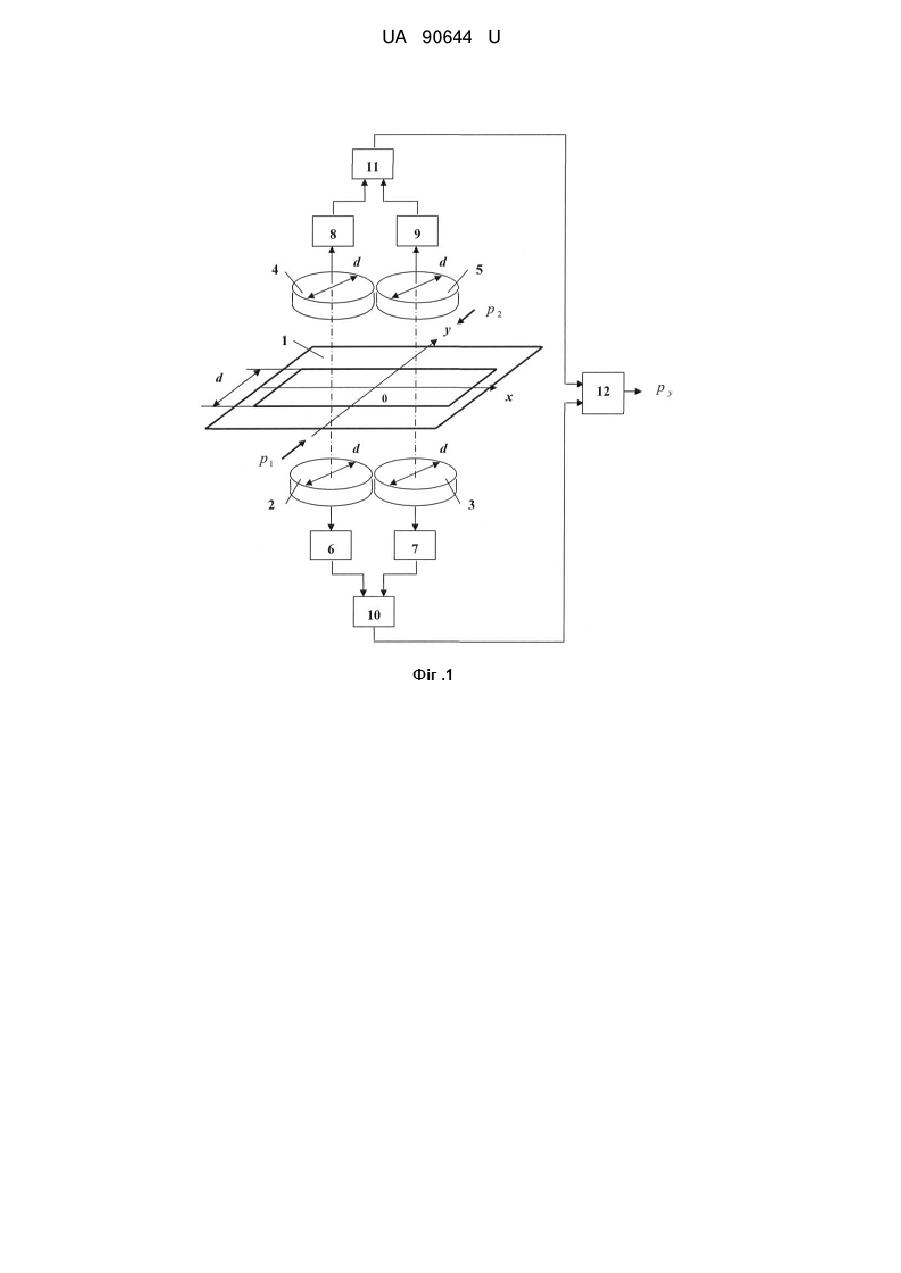
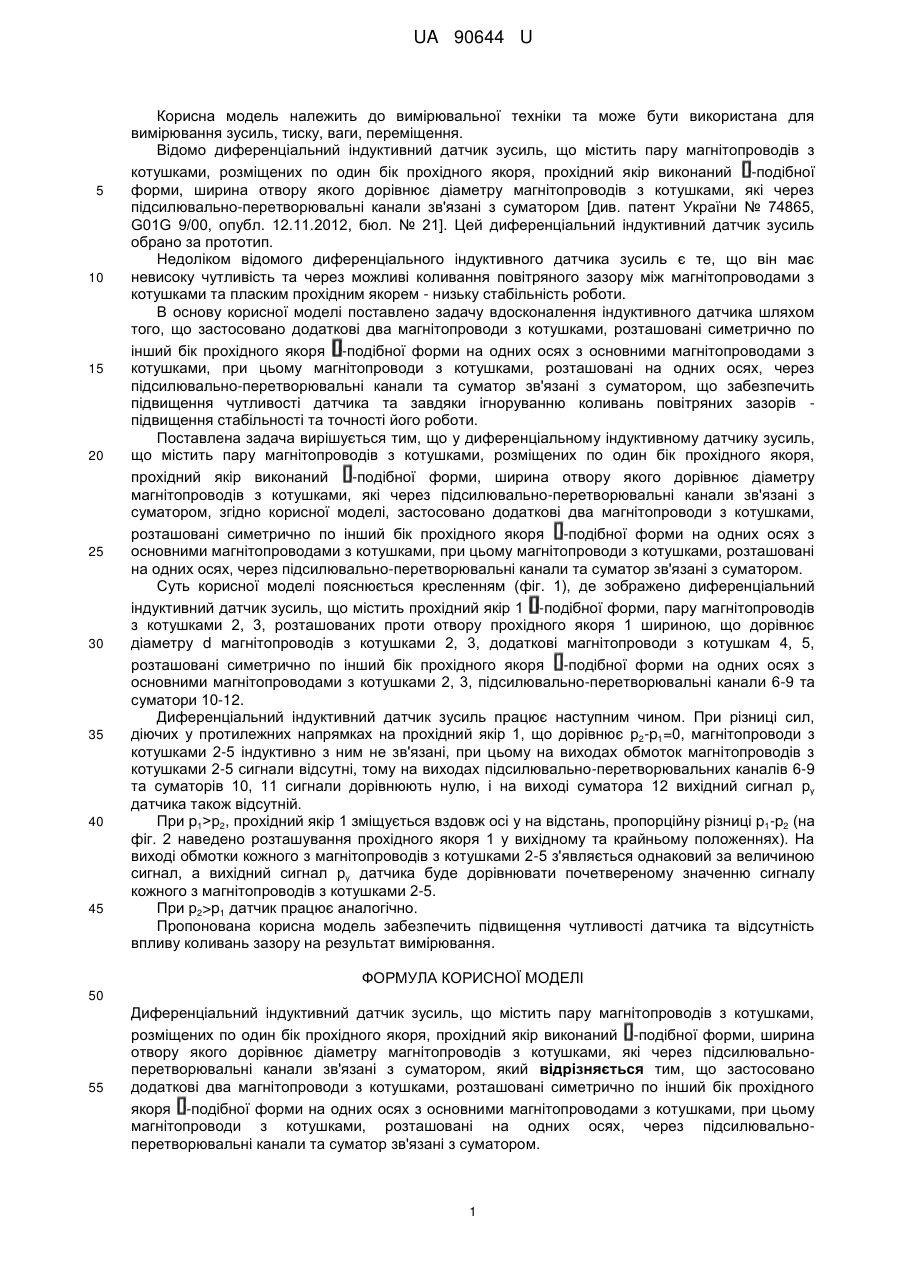
Реферат: UA 90644 U UA 90644 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання зусиль, тиску, ваги, переміщення. Відомо диференціальний індуктивний датчик зусиль, що містить пару магнітопроводів з котушками, розміщених по один бік прохідного якоря, прохідний якір виконаний -подібної форми, ширина отвору якого дорівнює діаметру магнітопроводів з котушками, які через підсилювально-перетворювальні канали зв'язані з суматором [див. патент України № 74865, G01G 9/00, опубл. 12.11.2012, бюл. № 21]. Цей диференціальний індуктивний датчик зусиль обрано за прототип. Недоліком відомого диференціального індуктивного датчика зусиль є те, що він має невисоку чутливість та через можливі коливання повітряного зазору між магнітопроводами з котушками та пласким прохідним якорем - низьку стабільність роботи. В основу корисної моделі поставлено задачу вдосконалення індуктивного датчика шляхом того, що застосовано додаткові два магнітопроводи з котушками, розташовані симетрично по інший бік прохідного якоря -подібної форми на одних осях з основними магнітопроводами з котушками, при цьому магнітопроводи з котушками, розташовані на одних осях, через підсилювально-перетворювальні канали та суматор зв'язані з суматором, що забезпечить підвищення чутливості датчика та завдяки ігноруванню коливань повітряних зазорів підвищення стабільності та точності його роботи. Поставлена задача вирішується тим, що у диференціальному індуктивному датчику зусиль, що містить пару магнітопроводів з котушками, розміщених по один бік прохідного якоря, прохідний якір виконаний -подібної форми, ширина отвору якого дорівнює діаметру магнітопроводів з котушками, які через підсилювально-перетворювальні канали зв'язані з суматором, згідно корисної моделі, застосовано додаткові два магнітопроводи з котушками, розташовані симетрично по інший бік прохідного якоря -подібної форми на одних осях з основними магнітопроводами з котушками, при цьому магнітопроводи з котушками, розташовані на одних осях, через підсилювально-перетворювальні канали та суматор зв'язані з суматором. Суть корисної моделі пояснюється кресленням (фіг. 1), де зображено диференціальний індуктивний датчик зусиль, що містить прохідний якір 1 -подібної форми, пару магнітопроводів з котушками 2, 3, розташованих проти отвору прохідного якоря 1 шириною, що дорівнює діаметру d магнітопроводів з котушками 2, 3, додаткові магнітопроводи з котушкам 4, 5, розташовані симетрично по інший бік прохідного якоря -подібної форми на одних осях з основними магнітопроводами з котушками 2, 3, підсилювально-перетворювальні канали 6-9 та суматори 10-12. Диференціальний індуктивний датчик зусиль працює наступним чином. При різниці сил, діючих у протилежних напрямках на прохідний якір 1, що дорівнює р2-p1=0, магнітопроводи з котушками 2-5 індуктивно з ним не зв'язані, при цьому на виходах обмоток магнітопроводів з котушками 2-5 сигнали відсутні, тому на виходах підсилювально-перетворювальних каналів 6-9 та суматорів 10, 11 сигнали дорівнюють нулю, і на виході суматора 12 вихідний сигнал рy датчика також відсутній. При p1>р2, прохідний якір 1 зміщується вздовж осі у на відстань, пропорційну різниці p1-p2 (на фіг. 2 наведено розташування прохідного якоря 1 у вихідному та крайньому положеннях). На виході обмотки кожного з магнітопроводів з котушками 2-5 з'являється однаковий за величиною сигнал, а вихідний сигнал ру датчика буде дорівнювати почетвереному значенню сигналу кожного з магнітопроводів з котушками 2-5. При р2>p1 датчик працює аналогічно. Пропонована корисна модель забезпечить підвищення чутливості датчика та відсутність впливу коливань зазору на результат вимірювання. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Диференціальний індуктивний датчик зусиль, що містить пару магнітопроводів з котушками, розміщених по один бік прохідного якоря, прохідний якір виконаний -подібної форми, ширина отвору якого дорівнює діаметру магнітопроводів з котушками, які через підсилювальноперетворювальні канали зв'язані з суматором, який відрізняється тим, що застосовано додаткові два магнітопроводи з котушками, розташовані симетрично по інший бік прохідного якоря -подібної форми на одних осях з основними магнітопроводами з котушками, при цьому магнітопроводи з котушками, розташовані на одних осях, через підсилювальноперетворювальні канали та суматор зв'язані з суматором. 1 UA 90644 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: датчик, зусиль, індуктивний, диференціальний
Код посилання
<a href="https://ua.patents.su/4-90644-diferencialnijj-induktivnijj-datchik-zusil.html" target="_blank" rel="follow" title="База патентів України">Диференціальний індуктивний датчик зусиль</a>
Диференціальний індуктивний датчик зусиль
Номер патенту: 84595
Опубліковано: 25.10.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: індуктивний, диференціальний, датчик, зусиль
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані зі входом диференціального підсилювача через суматор, який відрізняється тим, що прохідний якір виконаний
Диференціальний індуктивний датчик зусиль
Номер патенту: 68517
Опубліковано: 26.03.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик, зусиль, диференціальний, індуктивний
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташовані симетрично відносно прохідного якоря з протилежного боку на осях, зміщені від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані зі входом диференціального...
Диференціальний індуктивний датчик зусиль

Номер патенту: 84536
Опубліковано: 25.10.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик, зусиль, індуктивний, диференціальний
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить пару магнітопроводів з котушками, розміщених по один бік прохідного якоря -подібної форми, та підсилювально-перетворювальні канали, який відрізняється тим, що довжина отвору прохідного якоря -подібної форми дорівнює сумі відстані між осями магнітопроводів з котушками та їхньому радіусу, при цьому підсилювально-перетворювальні канали зв'язані з диференціальним підсилювачем.
Диференціальний індуктивний датчик зусиль
Номер патенту: 83549
Опубліковано: 10.09.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: диференціальний, індуктивний, датчик, зусиль
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом диференціального підсилювача через суматор, який відрізняється тим, що зазначені осі зміщені від торців прохідного якоря у напрямку від його центра на відстань,...
Диференціальний індуктивний датчик зусиль
Номер патенту: 61618
Опубліковано: 25.07.2011
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: датчик, індуктивний, зусиль, диференціальний
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом диференціального...