Роторно-лопатевий двигун
Формула / Реферат
1. Роторно-лопатевий двигун, що містить робочий об'єм, який обмежено зовні циліндричним корпусом циліндра (1) та торцевими кришками корпусу циліндра (17, 18), а з внутрішньої сторони - секційним порожнистим ведучим ротором (3), який складається із встановлених на осі (5) обертання лопатей секцій (15), до яких через відповідні кронштейни (9) закріплені лопаті (2), які розташовані всередині робочого об'єму, поділяють його на міжлопатеві робочі камери та пристосовані для того, щоб обертатись навколо першої геометричної осі, яка є геометричною віссю внутрішньої поверхні корпусу циліндра (1), та коливатись навколо цієї осі, змінюючи тим самим величину об'ємів міжлопатевих робочих камер при обертанні секційного ведучого ротора, вихідний вал, який за допомогою підшипників закріплений у верхній кришці (16) з можливістю обертання навколо другої геометричної осі, яка розташована із ексцентриситетом (R) відносно зазначеної першої геометричної осі, кривошипно-кулісний механізм забезпечення кінематичного зв'язку секційного ведучого ротора (3) з вихідним валом (20), впускне (6) і випускне (7) вікна, який відрізняється тим, що зазначений кривошипно-кулісний механізм включає в себе важелі-куліси (4), що зігнуті під прямим кутом (90о) і першою своєю частиною жорстко впресовані в отвори-сектори (28) секцій (15), до яких прикріплені відповідні лопаті (2), та розташоване за межами зазначеного робочого об'єму ведене колесо кривошипів (10), яке жорстко приєднане до вихідного вала (20) та оснащене шарнірно встановленими на ньому роликовими вилками-повзунами (11), які знаходяться в зчепленні із другими частинами важелів-куліс (4) з можливістю переміщуватись вздовж цих частин.
2. Двигун за п. 1, який відрізняється тим, що зазначений ексцентриситет (R) може змінюватись для зміни параметрів роботи двигуна.
3. Двигун за п. 1, який відрізняється тим, що секції (15) секційного ведучого ротора (3) мають зовнішні кільця (21) з кронштейнами (9) кріплення лопатей та втулки осьового підшипника секцій ротора (23), які з'єднані між собою ребрами (22) з утворенням отворів-секторів (28) для жорсткого поєднання з першими частинами важелів-куліс (4) та утворенням внутрішньої порожнини (29) секційного ведучого ротора (3), причому система охолодження та змащення, яка має патрубки (24), пристосована для продування через зазначену внутрішню порожнину (29) повітря для охолодження з аерозольними змащувальними речовинами для змащення.
Текст
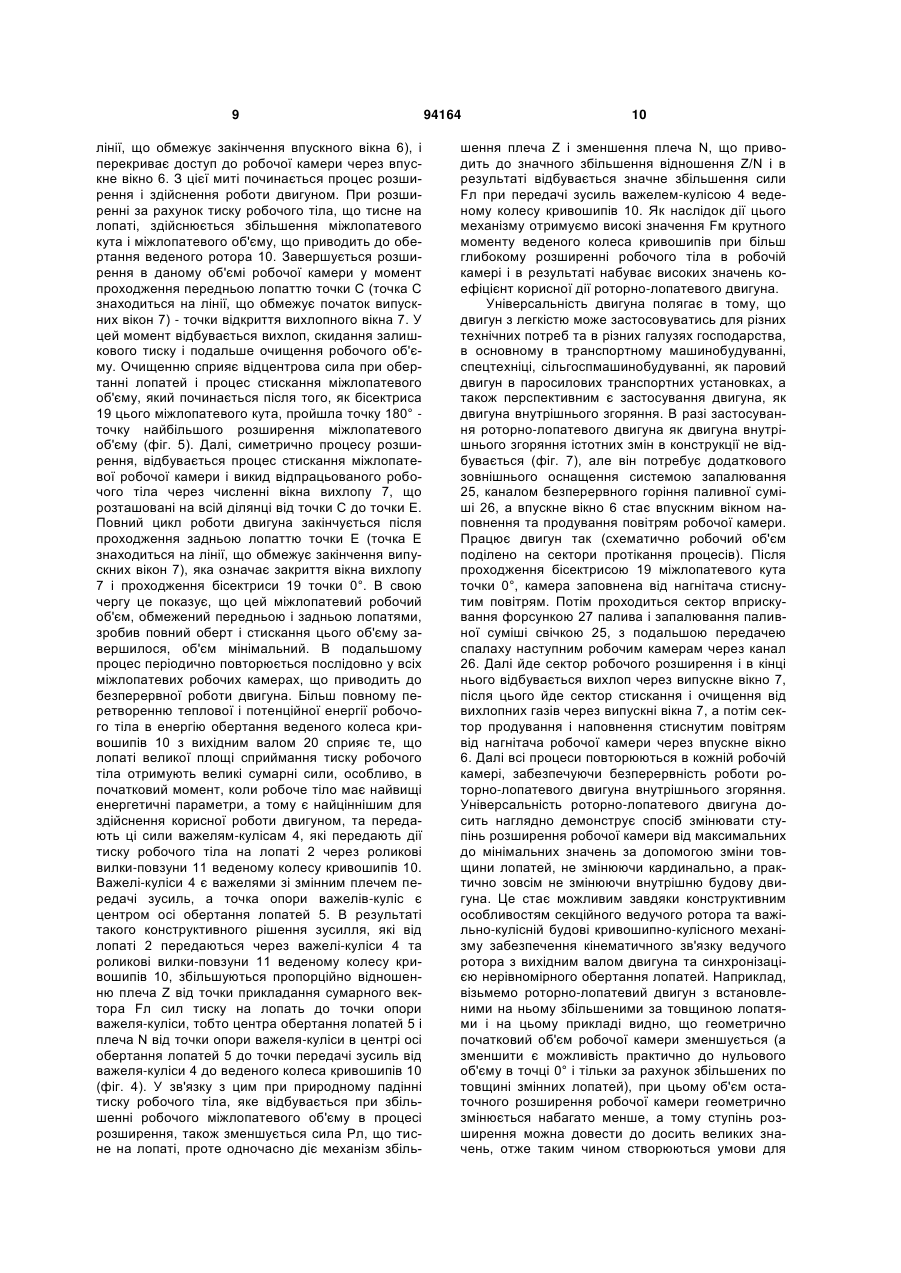
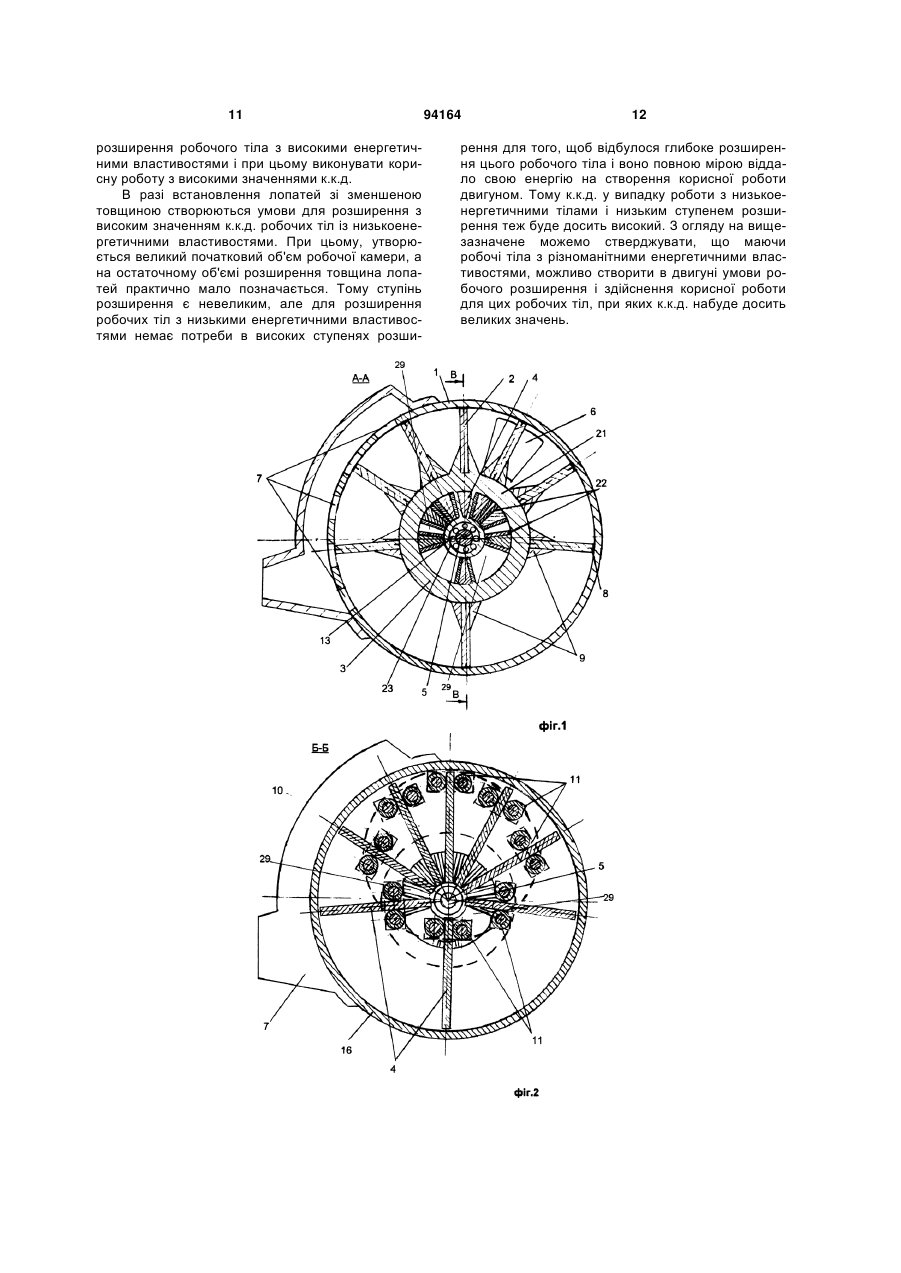
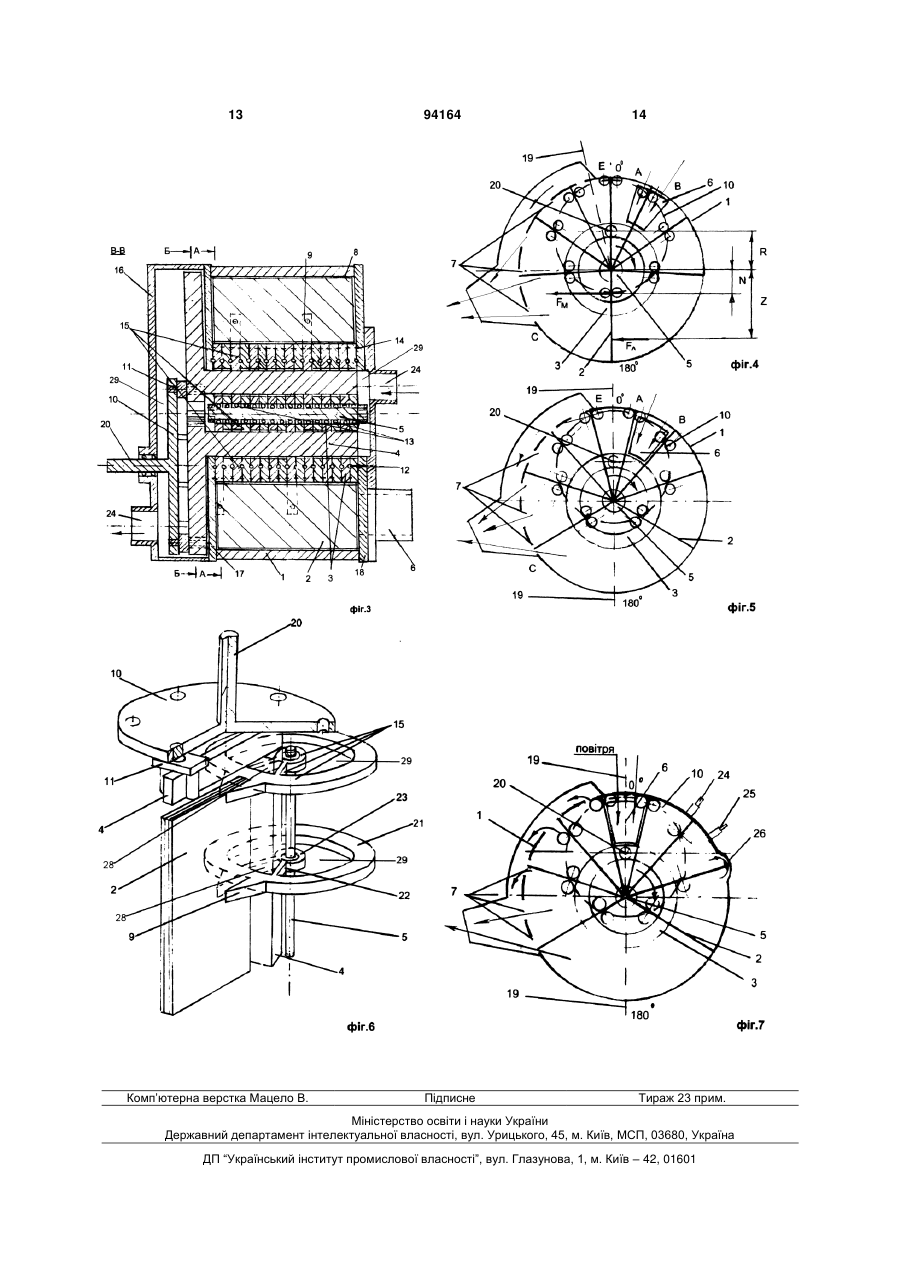
1. Роторно-лопатевий двигун, що містить робочий об'єм, який обмежено зовні циліндричним корпусом циліндра (1) та торцевими кришками корпусу циліндра (17, 18), а з внутрішньої сторони - секційним порожнистим ведучим ротором (3), який складається із встановлених на осі (5) обертання лопатей секцій (15), до яких через відповідні кронштейни (9) закріплені лопаті (2), які розташовані всередині робочого об'єму, поділяють його на міжлопатеві робочі камери та пристосовані для того, щоб обертатись навколо першої геометричної осі, яка є геометричною віссю внутрішньої поверхні корпусу циліндра (1), та коливатись навколо цієї осі, змінюючи тим самим величину об'ємів міжлопатевих робочих камер при обертанні секційного ведучого ротора, вихідний вал, який за допомогою підшипників закріплений у верхній кришці (16) з можливістю обертання навколо другої геометричної осі, яка розташована із ексцентриситетом (R) відносно зазначеної першої геометричної C2 2 UA 1 3 (к.к.д.) та ненадійності окремих вузлів, які сприймають великі навантаження, що приводить в результаті до ненадійності усього двигуна. Найбільш близьким за конструкцією є роторнолопатевий двигун, що містить робочий об'єм, який зовні обмежено циліндричним корпусом циліндра та торцевими кришками корпуса циліндра, а з внутрішньої сторони - порожнистим веденим ротором. Робочий об'єм поділено лопатями на міжлопатеві робочі камери, які ущільнені компресійними ущільненнями. Лопаті обертаються співвісно відносно внутрішньої поверхні корпусу циліндра та пристосовані для того, щоб коливатись навколо осі обертання, змінюючи тим самим величину об'ємів міжлопатевих робочих камер при обертанні ведучого ротора. Вісь обертання лопатей знаходиться в центрі кола корпусу циліндра і вона є першою геометричною віссю, а також і віссю секційного ведучого ротора, на секціях якого жорстко закріплені лопаті. Двигун має ведений ротор, який жорстко зв'язаний із вихідним валом та пристосований для того, щоб обертатись навколо другої геометричної осі, яка є також і віссю вихідного вала і розташована із зміщенням тобто ексцентрично відносно першої геометричної осі. Кожна лопать зв'язана кривошипно-кулісним механізмом із веденим ротором таким чином, що забезпечується синхронне обертання роторів та коливання лопатей. Двигун також має систему охолодження, систему подачі палива, систему запалювання та впускне і випускне вікна (US 4168941 А, 25.09.1979). Недоліком цього двигуна є мала початкова сила тиску на ведений ротор від лопатей. Це пов'язано з тим, що на початку робочого розширення в робочій камері початковий тиск робочого тіла, який в цю мить є найвищим, тому найціннішим енергетично, тисне на обидві лопаті, які створюють міжлопатевий робочий об'єм, в протилежні боки, а тому значною мірою сили тиску компенсуються і тільки різниця в площах лопатей створює додаткову силу, яка є головною рушійною силою двигуна. Однак, в цей початковий момент вона мінімальна тому, що мала різниця в площі лопатей породжує і малу силу, яка здійснює корисну роботу двигуна, а величина корисної роботи безпосередньо пов'язана з величиною к.к.д., і тому його величина дещо знижена. Другий недолік це недостатня універсальність двигуна, яка полягає в тому, що неможливо переладнати двигун на інші параметри роботи, наприклад, змінити ступінь розширення в робочій камері, при зміні параметрів робочого тіла, не змінюючи кардинально будову двигуна. Недоліком також є відсутність ефективного охолодження та змащення внутрішньої частини двигуна, що приводить до достатньо вагомих втрат в процесі роботи двигуна і зниження к.к.д. Ще недоліком є те, що кривошипно-кулісний механізм синхронізації коливань лопатей і їх зв'язку з вихідним валом знаходиться в робочих камерах під впливом високих температур без можливості забезпечення змащенням тертьових пар при роботі двигуна і це приводить до ненадійної роботи з великими механічними втратами. Ці недоліки здебільшого долаються при застосуванні роторно-лопатевого двигуна, котрий має 94164 4 конструкцію, що пропонується далі. Задача, яка стоїть в основі винаходу, це створення універсального двигуна, з підвищеною початковою силою тиску, яка створює корисну роботу, одночасно, з великим ступенем розширення (відношенням величини максимального остаточного об'єму міжлопатевої робочої камери до величини мінімального початкового об'єму) робочого тіла, низькими механічними втратами на тертя і збільшеним к.к.д., у якому розширення з отриманням механічної роботи з високим к.к.д. можливе при розширенні робочого тіла з низькими енергетичними властивостями (низький тиск, низька температура і т. д.). Технічний результат винаходу забезпечується завдяки створенню двигуна, що містить циліндричний корпус циліндра, торцеві кришки корпусу, верхню кришку, секційний ведучий ротор та встановлений ексцентрично до нього за межами корпусу циліндра, вихідний вал. Всередині робочий об'єм поділено лопатями на міжлопатеві робочі камери, ущільнені компресійними ущільненнями. До вихідного вала жорстко прикріплено ведене колесо кривошипів, що є елементом кривошипнокулісного механізму забезпечення кінематичного зв'язку секційного ведучого ротора із вихідним валом двигуна та синхронізації нерівномірного обертання лопатей. Також двигун має впускне та випускні вікна, систему охолодження і змащення. В ньому для отримання більшої корисної роботи, для забезпечення ефективної універсальності, для охолодження і змащення внутрішньої частини двигуна, для зменшення механічних втрат на тертя в двигуні, порівняно з найближчим аналогом, застосовуються конструктивні технічні рішення в кількох напрямках. Першим напрямком є збільшення площі лопатей для збільшення сумарної сили тиску на лопаті. Це стає можливим завдяки секційній конструкції ведучого ротора, який складається з секцій, що мають кільця секцій, отвори-сектори секцій, ребра секцій, втулки осьового підшипника, кронштейни кріплення лопатей. Секції з'єднуються в об'єднаний вузол віссю через напресовані підшипники, які знаходяться у втулках осьових підшипників секцій. Цей вузол є ведучим секційним ротором, до якого кріпляться лопаті великої площі сприймання тиску, причому площа лопатей є незмінною, тому в початковий момент роботи двигуна, коли тиск робочого тіла є найвищий і тому енергетично найціннішим, пропорційно площі лопатей сумарна сила тиску на лопаті є також великою. Лопаті мають можливість обертатись співвісно відносно внутрішньої поверхні корпусу циліндра, тобто відносно першої геометричної вісі двигуна, та пристосовані для того, щоб коливатись навколо цієї осі. Таким чином, пропорційно збільшенню площі лопатей збільшується і сила крутного моменту секційного ведучого ротора. Подальше додаткове збільшення сили від тиску, яку сприйняла лопать, здійснюється завдяки застосуванню в конструкції двигуна кривошипно-кулісного механізму, що складається з важелів-куліс, які зігнуті під прямим кутом і однією частиною кріпляться до лопатей через секції секційного ведучого ротора, другою частиною передають далі зусилля, як куліси і як важелі зі змінним плечем передачі зусиль, 5 роликовим вилкам-повзунами, що котяться роликами вздовж важелів-куліс з мінімальним тертям, і які шарнірно з'єднані з колесом кривошипів, що жорстко прикріплено до вихідного вала. Отже додаткове збільшення сили тиску, яку сприйняла лопать, здійснюється при передачі цієї сили від важелів-куліс, які є важелями зі змінним плечем передачі зусиль, до колеса кривошипів і до вихідного вала. Об'єднуючи функцію кривошипнокулісного механізму із збільшеними за площею лопатями, отримуємо в підсумку збільшений крутний момент двигуна. Відповідно більшою є корисна робота і збільшеним є к.к.д. Другий напрямок полягає у тому, що завдяки внутрішній будові двигуна ми маємо можливість, не змінюючи кардинально внутрішню будову двигуна, встановлювати лопаті різної товщини для отримання різних ступенів розширення робочої камери, наприклад, встановлюючи товстіші лопаті, ми зменшуємо геометрично початковий об'єм робочої камери (зменшити його можливо практично до нульового об'єму), при цьому об'єм остаточного розширення робочої камери змінюється набагато менше, тому ступінь розширення робочої камери отримаємо великий і в результаті отримуємо збільшення к.к.д. Встановлюючи тонкі лопаті, наскільки це можливо з огляду на те, що лопаті сприймають великі навантаження, необхідно мати запас міцності лопатей, в результаті маємо збільшення початкового об'єму робочої камери, тобто двигун разом з більшим початковим об'ємом робочого тіла більше отримує енергії на початку процесу розширення, а отже більшою буде робота, здійснювана двигуном. Це необхідно при низьких енергетичних властивостях робочого тіла, коли нема потреби у великому ступені розширення робочої камери для глибокого розширення цього робочого тіла, і, при цьому, досягаються високі показники к.к.д. Третій напрямок це регулювання параметрами двигуна, зокрема ступенем розширення, змінюючи відстань К між віссю вихідного вала, що є другою геометричною віссю, та віссю ведучого секційного ротора, що є першою геометричною віссю, не спиняючи роботу двигуна. Це виконується за допомогою зовнішнього пристрою переміщення вихідного вала. Четвертий напрямок це впровадження охолодження та змащення внутрішньої частини двигуна через внутрішню порожнину секційного ведучого ротора, де достатньо місця між внутрішніми частинами ведучого секційного ротора для продування повітрям для охолодження, а змішані з повітрям аерозольні змащувальні речовини змащують тертьові поверхні в двигуні. Це приводить до збільшення ефективності роботи і зменшення механічних втрат на тертя, а охолодження внутрішньої частини двигуна дає можливість підняти температуру протікання робочих процесів при роботі двигуна, наслідком цього буде збільшення корисної роботи та збільшення к.к.д. П'ятий напрямок це винесення кривошипно-кулісного механізму синхронізації коливань лопатей і кінематичного зв'язку секційного ведучого ротора з вихідним валом за межі робочих камер. Це вирішується завдяки конструкції секційного ведучого ротора, яка робить можливим застосування важелів-куліс, зігнутих під прямим 94164 6 кутом, у яких частина, що виконує функцію куліси, зчіплюється з роликовими вилками-повзунами, шарнірно встановленими на колесі кривошипів за межами корпусу циліндрів. Така будова двигуна поряд із кращими властивостями, притаманними цьому кривошипно-кулісному механізму, такими як надійність, можливість довготривалого сприймання великих навантажень, ще й дає можливість здійснювати механізмом свою функцію в об'ємі охолодження і змащення тертьових пар, що дає ефект збільшення ресурсу роботи двигуна, зменшення механічних втрат та, як наслідок, збільшення к.к.д. Підсумовуючи вищезазначене, з великою імовірністю можна стверджувати, що завдяки технічним рішенням в будові ведучого секційного ротора і кривошипно-кулісного механізму, ми отримуємо двигун з великою початковою силою розширення, збільшеним ступенем розширення (коли це збільшення необхідне), зменшеними механічними втратами на тертя, великим ресурсом роботи кривошипно-кулісного механізму, ефективною універсальністю, тобто, маючи робочі тіла з різноманітними енергетичними властивостями, можливо створити в двигуні умови розширення і здійснення корисної роботи для кожного з цих робочих тіл, не змінюючи кардинально внутрішньої будови двигуна, при яких к.к.д. набуде збільшених значень. Суть винаходу графічно пояснюють креслення, на яких на фіг. 1 зображено поперечний розріз двигуна по А-А; на фіг. 2 - поперечний розріз по ББ з зображенням важелів-куліс, які знаходяться в зачепленні з роликовими вилками-повзунами веденого колеса кривошипів; на фіг. 3 - поздовжній розріз двигуна по В-В; на фіг. 4, 5 - схематично показана робота двигуна; на фіг. 6 - стереографічне взаємне положення лопаті, двох секцій секційного ведучого ротора, об'єднаних важелемкулісою і віссю обертання лопатей, а також ведене колесо кривошипів з вихідним валом в зачепленні через роликову вилку-повзун з важелем-кулісою; на фіг. 7 схематично показаний роторнолопатевий двигун при застосуванні як двигуна внутрішнього згоряння. Роторно-лопатевий двигун містить - корпус циліндра 1, лопаті 2, секційний ведучий ротор 3, важелі-куліси 4, вісь обертання лопатей 5, впускне вікно 6, випускні вікна 7, компресійні ущільнення лопатей 8, кронштейни кріплення лопатей 9, ведене колесо кривошипів 10, роликові вилки-повзуни 11, міжсекційні підшипники ротора 12, осьові підшипники секцій ротора 13, міжсекційні компресійні ущільнення 14, секції ведучого ротора 15, верхню кришку двигуна 16, передню торцеву кришку корпусу циліндра 17, задню торцеву кришку корпусу циліндра 18, бісектрису міжлопатевого кута 19, вихідний вал 20, кільця секцій ротора 21, ребра секцій ротора 22, втулки осьового підшипника секції ротора 23, патрубки системи охолодження та змащування двигуна 24, свічку системи запалювання 25, канал безперервного горіння паливної суміші 26, форсунку паливної системи 27, отворисектори секцій 28, канали охолодження та змащення 29. 7 Роторно-лопатевий двигун, зображений на фіг. 1, 2, 3, 4, 5, 6, 7, має робочий об'єм, обмежений із зовнішнього боку циліндричним корпусом циліндра 1, передньою 17 і задньою 18 торцевими кришками корпусу циліндра. Внутрішня сторона робочого об'єму, обмежена секційним ведучим ротором 3, який складений із секцій 15. Секція 15 складається з кільця 21, кронштейна кріплення лопатей 9, отвору-сектора секції 28, ребер секції 22, втулки осьового підшипника секції 23. Кронштейн 9 передбачений для кріплення лопаті 2 до кільця 21 секції 15, яке сприймає навантаження від лопаті і передає їх ребрам 22. Через отвір-сектор 28 проходить і в ньому кріпиться важіль-куліса 4. Сектор 28 переходить у втулку 23 осьового підшипника секції 13. Кільця секцій з двох сторін притискаються і через підшипники 12 здавлюються між собою кришками 17 і 18 корпусу циліндра, щілини між кільцями секцій герметизуються компресійними ущільненнями 14. Роторні секції 15 з'єднуються в загальний вузол віссю 5, на яку напресовані втулки 23 з осьовими підшипниками 13. Цей вузол є секційним ведучим ротором 3 двигуна. Важількуліса 4 поєднує дві секції 15, до яких кріпиться лопать 2 (Фіг. 6). Важіль-куліса зігнутий під прямим кутом (90°) і однією частиною сполучений через отвори-сектори 28 з двома секціями 15, а іншою частиною, працюючи як важіль-куліса, передає робочі зусилля від лопатей 2 через роликову вилку-повзун 11 веденому колесу кривошипів 10 (Фіг.2). Положення важеля-куліси 4 відповідає положенню лопаті щодо корпусу циліндра і визначається положенням вилки-повзуна веденого колеса кривошипів, по-іншому, ведене колесо кривошипів управляє положенням лопатей і сприймає робочі зусилля від них. Робочий об'єм поділений вісьмома лопатями на міжлопатеві об'єми робочих камер, камера обмежена двома сусідніми лопатями (передньою і задньою по ходу обертання лопатей). Кожна з восьми лопатей сполучена через роторні секції 15 з важелем-кулісою 4 (для прикладу розглядаємо восьмилопатевий роторний двигун ), тому вісім важелів-куліс 4 знаходяться в зачепленні через роликові вилки-повзуни 11 з веденим колесом кривошипів 10, який встановлено ексцентрично відносно ведучого ротора за межами корпусу циліндра. Вісь веденого колеса кривошипів 10 і вихідного вала 20, який через підшипник в корпусі підшипника закріплений в верхній кришці 16 двигуна, є другою геометричною віссю і зміщена паралельно відносно осі ведучого ротора 3 і центра обертання лопатей 5, що є першою геометричною віссю двигуна, на відстань К (фіг. 3,4). Це означає, що при круговому обертанні лопатей у середині корпусу циліндра відбувається періодична зміна міжлопатевого кута, а також періодично змінюється і міжлопатевий об'єм робочих камер. І навпаки, зміна міжлопатевого кута і об'єму робочих камер приводить до обертання секційного ведучого ротора і веденого колеса кривошипів. Зміна відстані К між осями веденого колеса кривошипів 10 і секційного ведучого ротора 3 приводить до зміни величини мінімального і максимального періодично змінюваного міжлопатевого кута і об'єму. Це означає, що змінюючи відстань К, можливе керування 94164 8 робочими параметрами під час роботи двигуна, а саме, величиною початкового мінімального робочого об'єму, заповненого робочим тілом, і величиною об'єму остаточного робочого розширення. Фактично в двигуні використовується механізм в конструкції секційного ведучого ротора 3 та кривошипно-шатунного механізму, що дає можливість роботу, здійснювану лопатями 2 при розширенні робочої камери, тобто русі лопатей одна від одної, або інакше опозитного руху, перетворювати в роботу крутного моменту вихідного вала 20 двигуна. Двигун має об'єднану систему охолодження і змащення, у якій через патрубки 24 продувається повітря для охолодження з аерозольними змащувальними речовинами для змащення тертьових поверхонь у двигуні. Продування здійснюється крізь внутрішню порожнину секційного ведучого ротора 3, де є достатня кількість порожнистих каналів 29 (фіг. 1, 2, 3, 6) між частинами внутрішньої будови ротора, до того ж циклічно-кругове переміщення важелів-куліс та секторів секцій ротора, яке здійснюється в цьому об'ємі, сприяє процесові охолодження та змащення внутрішньої частини двигуна, що істотно впливає на ефективність його роботи. Двигун працює таким чином (схематично робота двигуна показана на фіг. 4, 5). Точку, в якій найменша відстань між віссю веденого колеса кривошипів 10 і колом корпусу циліндра 1, беремо за початок відліку робочих процесів в двигуні і початок кутового обертання лопатей 2 і позначимо цю точку 0°. Ця точка знаходиться на перетинанні кола внутрішньої поверхні корпусу циліндра і лінії, яка проведена через вісь обертання лопатей 5 і вісь 20 вихідного вала. На діаметрально протилежній стороні на цій лінії знаходиться точка 180°, збіг лопаті з якою означає, що лопать 2 зробила півоберту навколо осі 5. Також ці дві точки характеризують об'єм робочої камери і кут між двома сусідніми лопатями. У момент збігу бісектриси 19 міжлопатевого кута з точкою 0° між цими лопатями утворюється мінімальний кут і, як наслідок, мінімальний об'єм робочої камери. Суміщення точки 180° і бісектриси 19 говорить про те, що міжлопатевий кут і об'єм досягли найбільшої величини. Процеси, які відбуваються при роботі двигуна розглядатимемо на прикладі одного міжлопатевого робочого об'єму, обмеженого передньою та задньою лопатями. Початок роботи двигуна відбувається в момент, коли бісектриса 19 кута між передньою і задньою лопатями знаходиться в точці 0°. При обертанні (за годинниковою стрілкою) лопатей передня лопать даного робочого об'єму проходить точку А (на фіг.4 точка А знаходиться на лінії, що обмежує початок впускного вікна 6) і відкриває доступ через впускне вікно 6 до робочого міжлопатевого об'єму, через впускне вікно 6 відбувається заповнення робочим тілом міжлопатевого об'єму. Робочим тілом можуть бути нагріті гази, суміш газів для подальшого окислення в процесі розширення, пари різних речовин з надмірним тиском або вихлопні гази при роботі двигуна внутрішнього згоряння і т. д. Процес заповнення робочої камери закінчується в момент, коли задня лопать проходить точку В (точка В знаходиться на 9 лінії, що обмежує закінчення впускного вікна 6), і перекриває доступ до робочої камери через впускне вікно 6. З цієї миті починається процес розширення і здійснення роботи двигуном. При розширенні за рахунок тиску робочого тіла, що тисне на лопаті, здійснюється збільшення міжлопатевого кута і міжлопатевого об'єму, що приводить до обертання веденого ротора 10. Завершується розширення в даному об'ємі робочої камери у момент проходження передньою лопаттю точки С (точка С знаходиться на лінії, що обмежує початок випускних вікон 7) - точки відкриття вихлопного вікна 7. У цей момент відбувається вихлоп, скидання залишкового тиску і подальше очищення робочого об'єму. Очищенню сприяє відцентрова сила при обертанні лопатей і процес стискання міжлопатевого об'єму, який починається після того, як бісектриса 19 цього міжлопатевого кута, пройшла точку 180° точку найбільшого розширення міжлопатевого об'єму (фіг. 5). Далі, симетрично процесу розширення, відбувається процес стискання міжлопатевої робочої камери і викид відпрацьованого робочого тіла через численні вікна вихлопу 7, що розташовані на всій ділянці від точки С до точки Е. Повний цикл роботи двигуна закінчується після проходження задньою лопаттю точки Е (точка Е знаходиться на лінії, що обмежує закінчення випускних вікон 7), яка означає закриття вікна вихлопу 7 і проходження бісектриси 19 точки 0°. В свою чергу це показує, що цей міжлопатевий робочий об'єм, обмежений передньою і задньою лопатями, зробив повний оберт і стискання цього об'єму завершилося, об'єм мінімальний. В подальшому процес періодично повторюється послідовно у всіх міжлопатевих робочих камерах, що приводить до безперервної роботи двигуна. Більш повному перетворенню теплової і потенційної енергії робочого тіла в енергію обертання веденого колеса кривошипів 10 з вихідним валом 20 сприяє те, що лопаті великої площі сприймання тиску робочого тіла отримують великі сумарні сили, особливо, в початковий момент, коли робоче тіло має найвищі енергетичні параметри, а тому є найціннішим для здійснення корисної роботи двигуном, та передають ці сили важелям-кулісам 4, які передають дії тиску робочого тіла на лопаті 2 через роликові вилки-повзуни 11 веденому колесу кривошипів 10. Важелі-куліси 4 є важелями зі змінним плечем передачі зусиль, а точка опори важелів-куліс є центром осі обертання лопатей 5. В результаті такого конструктивного рішення зусилля, які від лопаті 2 передаються через важелі-куліси 4 та роликові вилки-повзуни 11 веденому колесу кривошипів 10, збільшуються пропорційно відношенню плеча Z від точки прикладання сумарного вектора Fл сил тиску на лопать до точки опори важеля-куліси, тобто центра обертання лопатей 5 і плеча N від точки опори важеля-куліси в центрі осі обертання лопатей 5 до точки передачі зусиль від важеля-куліси 4 до веденого колеса кривошипів 10 (фіг. 4). У зв'язку з цим при природному падінні тиску робочого тіла, яке відбувається при збільшенні робочого міжлопатевого об'єму в процесі розширення, також зменшується сила Рл, що тисне на лопаті, проте одночасно діє механізм збіль 94164 10 шення плеча Z і зменшення плеча N, що приводить до значного збільшення відношення Z/N і в результаті відбувається значне збільшення сили Fл при передачі зусиль важелем-кулісою 4 веденому колесу кривошипів 10. Як наслідок дії цього механізму отримуємо високі значення Fм крутного моменту веденого колеса кривошипів при більш глибокому розширенні робочого тіла в робочій камері і в результаті набуває високих значень коефіцієнт корисної дії роторно-лопатевого двигуна. Універсальність двигуна полягає в тому, що двигун з легкістю може застосовуватись для різних технічних потреб та в різних галузях господарства, в основному в транспортному машинобудуванні, спецтехніці, сільгоспмашинобудуванні, як паровий двигун в паросилових транспортних установках, а також перспективним є застосування двигуна, як двигуна внутрішнього згоряння. В разі застосування роторно-лопатевого двигуна як двигуна внутрішнього згоряння істотних змін в конструкції не відбувається (фіг. 7), але він потребує додаткового зовнішнього оснащення системою запалювання 25, каналом безперервного горіння паливної суміші 26, а впускне вікно 6 стає впускним вікном наповнення та продування повітрям робочої камери. Працює двигун так (схематично робочий об'єм поділено на сектори протікання процесів). Після проходження бісектрисою 19 міжлопатевого кута точки 0°, камера заповнена від нагнітача стиснутим повітрям. Потім проходиться сектор вприскування форсункою 27 палива і запалювання паливної суміші свічкою 25, з подальшою передачею спалаху наступним робочим камерам через канал 26. Далі йде сектор робочого розширення і в кінці нього відбувається вихлоп через випускне вікно 7, після цього йде сектор стискання і очищення від вихлопних газів через випускні вікна 7, а потім сектор продування і наповнення стиснутим повітрям від нагнітача робочої камери через впускне вікно 6. Далі всі процеси повторюються в кожній робочій камері, забезпечуючи безперервність роботи роторно-лопатевого двигуна внутрішнього згоряння. Універсальність роторно-лопатевого двигуна досить наглядно демонструє спосіб змінювати ступінь розширення робочої камери від максимальних до мінімальних значень за допомогою зміни товщини лопатей, не змінюючи кардинально, а практично зовсім не змінюючи внутрішню будову двигуна. Це стає можливим завдяки конструктивним особливостям секційного ведучого ротора та важільно-кулісній будові кривошипно-кулісного механізму забезпечення кінематичного зв'язку ведучого ротора з вихідним валом двигуна та синхронізацією нерівномірного обертання лопатей. Наприклад, візьмемо роторно-лопатевий двигун з встановленими на ньому збільшеними за товщиною лопатями і на цьому прикладі видно, що геометрично початковий об'єм робочої камери зменшується (а зменшити є можливість практично до нульового об'єму в точці 0° і тільки за рахунок збільшених по товщині змінних лопатей), при цьому об'єм остаточного розширення робочої камери геометрично змінюється набагато менше, а тому ступінь розширення можна довести до досить великих значень, отже таким чином створюються умови для 11 розширення робочого тіла з високими енергетичними властивостями і при цьому виконувати корисну роботу з високими значеннями к.к.д. В разі встановлення лопатей зі зменшеною товщиною створюються умови для розширення з високим значенням к.к.д. робочих тіл із низькоенергетичними властивостями. При цьому, утворюється великий початковий об'єм робочої камери, а на остаточному об'ємі розширення товщина лопатей практично мало позначається. Тому ступінь розширення є невеликим, але для розширення робочих тіл з низькими енергетичними властивостями немає потреби в високих ступенях розши 94164 12 рення для того, щоб відбулося глибоке розширення цього робочого тіла і воно повною мірою віддало свою енергію на створення корисної роботи двигуном. Тому к.к.д. у випадку роботи з низькоенергетичними тілами і низьким ступенем розширення теж буде досить високий. З огляду на вищезазначене можемо стверджувати, що маючи робочі тіла з різноманітними енергетичними властивостями, можливо створити в двигуні умови робочого розширення і здійснення корисної роботи для цих робочих тіл, при яких к.к.д. набуде досить великих значень. 13 Комп’ютерна верстка Мацело В. 94164 Підписне 14 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRotary vane motor
Автори англійськоюDemenko Oleksandr Volodymyrovych
Назва патенту російськоюРоторно-лопастный двигатель
Автори російськоюДеменко Александр Владимирович
МПК / Мітки
МПК: F01C 1/352, F01C 17/00, F02B 55/06, F01C 1/07
Мітки: роторно-лопатевий, двигун
Код посилання
<a href="https://ua.patents.su/7-94164-rotorno-lopatevijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Роторно-лопатевий двигун</a>
Роторно-лопатевий двигун внутрішнього згоряння

Номер патенту: 35626
Опубліковано: 16.04.2001
Автор: Гуменюк Сафроній Васильович
МПК: F02B 53/00
Мітки: роторно-лопатевий, згоряння, двигун, внутрішнього
Формула / Реферат:
1. Роторно - лопатевий двигун внутрішнього згоряння, який має корпус у вигляді кільцевого циліндра з вікнами газорозподілу і боковими кришками, в якому розміщено колінчастий вал, ротор і лопаті з ущільнюючими пластинами, який відрізняється тим, що внутрішній діаметр його корпусу більший від зовнішнього діаметра ротора на величину радіуса коліна колінчастого вала, а сам ротор кінематично зв’язаний як з корпусом, так і з колінчастим...
Роторно-лопатевий опозитний двигун з роторними важелями
Номер патенту: 54631
Опубліковано: 25.11.2010
Автор: Деменко Олександр Володимирович
МПК: F01C 1/352, F02B 53/00
Мітки: опозитний, роторними, важелями, двигун, роторно-лопатевий
Формула / Реферат:
1. Роторно-лопатевий опозитний двигун з роторними важелями, що містить робочий об'єм, який оснащений зовні циліндричним корпусом циліндра (1) та торцевими кришками корпусу циліндра (16, 17), з внутрішньої сторони обмежується порожнистим ротором (3), всередині робочий об'єм поділено лопатями на міжлопатеві робочі камери, лопаті (2) обертаються співвісно відносно внутрішньої поверхні корпусу циліндра (1), вісь обертання лопатей (5) знаходиться...
Роторно-лопатевий опозитний двигун
Номер патенту: 54632
Опубліковано: 25.11.2010
Автор: Деменко Олександр Володимирович
МПК: F02B 53/00, F01C 1/352
Мітки: опозитний, двигун, роторно-лопатевий
Формула / Реферат:
1. Роторно-лопатевий опозитний двигун, що містить робочий об'єм, який обмежено зовні циліндричним корпусом циліндра (1), торцевими кришками корпусу циліндра (3) і з внутрішньої сторони порожнистим ротором (2), всередині робочий об'єм поділено лопатями (9) на міжлопатеві робочі камери, лопаті (9) обертаються співвісно відносно внутрішньої поверхні корпусу циліндра, вісь (15) обертання лопатей знаходиться в центрі кола корпусу циліндра,...
Роторно-лопатевий двигун брежнєва
Номер патенту: 56018
Опубліковано: 15.04.2003
Автор: Брежнєв Кирило Миколаєвич
МПК: F02B 53/00
Мітки: двигун, роторно-лопатевий, брежнєва
Формула / Реферат:
Роторно-лопатевий двигун, який містить корпус з камерами згоряння, вал, на якому розташовано ротор з лопатями, що утворюють з внутрішньою порожниною корпуса робочу камеру, системи постачання повітря, подачі палива, вихлопу, який відрізняється тим, що контактні поверхні корпуса та ротора виконані сферичними, при цьому лопаті ротора розташовані у діаметральній площині сферичного ротора та розміщені в кільцевій порожнині корпуса, а між...
Лопатевий двигун
Номер патенту: 33697
Опубліковано: 15.02.2001
Автор: Горенюк Віктор Васильович
МПК: F03D 3/00
Текст:
...складова якої через траверсу 4 створює крутячий момент на вертикальному валу 5. На підвітряному боці лопать 1 створює опір обертанню вертикального валу 5. Крутячий момент що створюється лопатю 1 на навітряному боці більший ніж момент опору, що створюється лопатю 1 на підвітряному боці. Результуючий крутячий момент, що виникає на валу 5, може використовуватись в якості механічного приводу різного виду навантаження. Таким чином застосування...
Попередній патент: Спосіб та пристрій для дистанційного знімання місцевості
Наступний патент: Композиція для визначення білка в біологічних рідинах
Випадковий патент: Радіаційно-конвективна сушильна установка