Привід рукавичного автомата
Номер патенту: 94299
Опубліковано: 10.11.2014

Формула / Реферат
Привід рукавичного автомата, що містить електродвигун, першу та другу клинопасові передачі, що містять ведучі та ведені шківи, редуктор та приводний вал, кінематично з'єднані між собою, який відрізняється тим, що додатково оснащений обгінною муфтою, з'єднаною з електродвигуном, та плоскою спіральною пружиною, встановленою в ведучий шків першої клинопасової передачі, причому плоска спіральна пружина одним кінцем з'єднана з обгінною муфтою, а другим кінцем з'єднана з ведучим шківом першої клинопасової передачі.
Текст
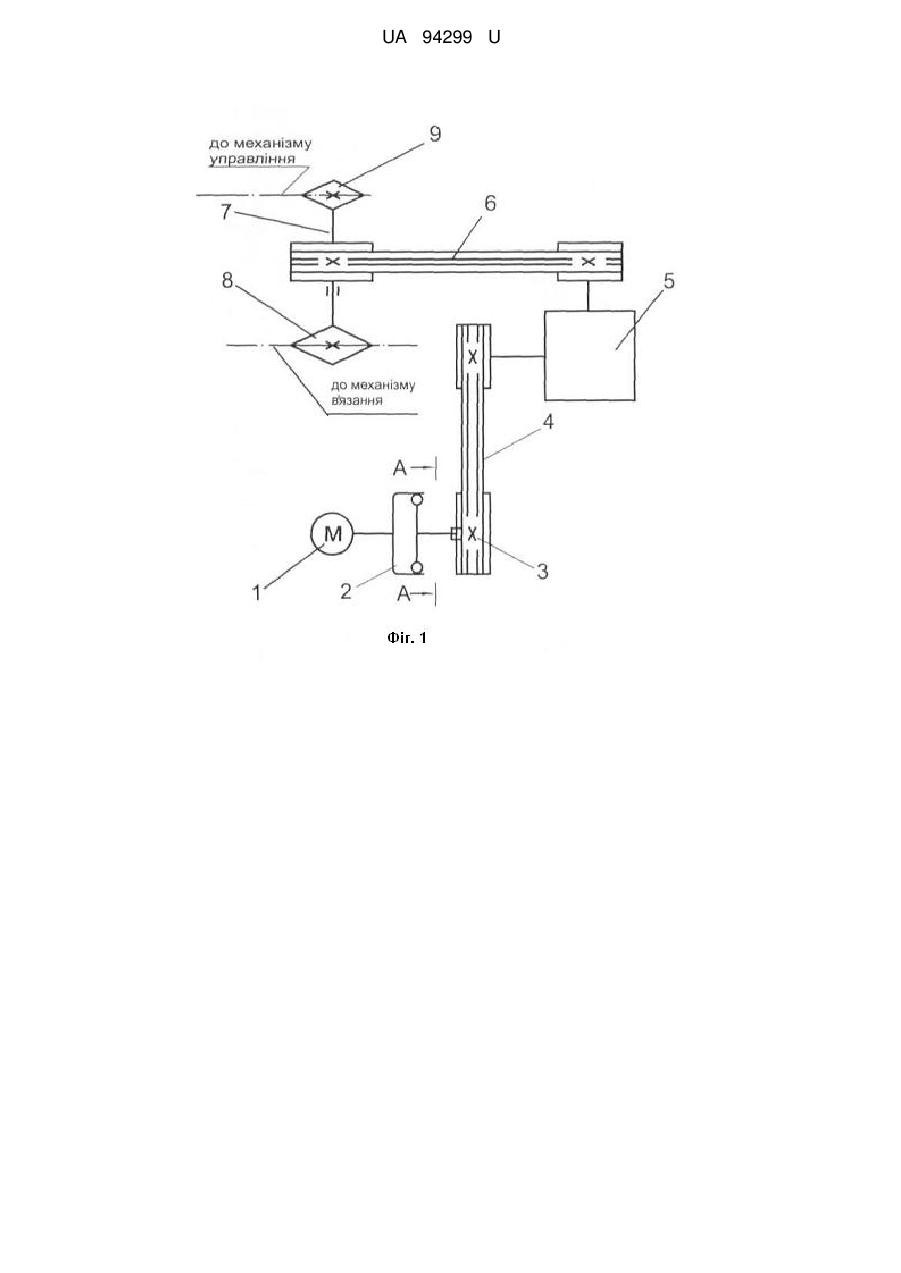
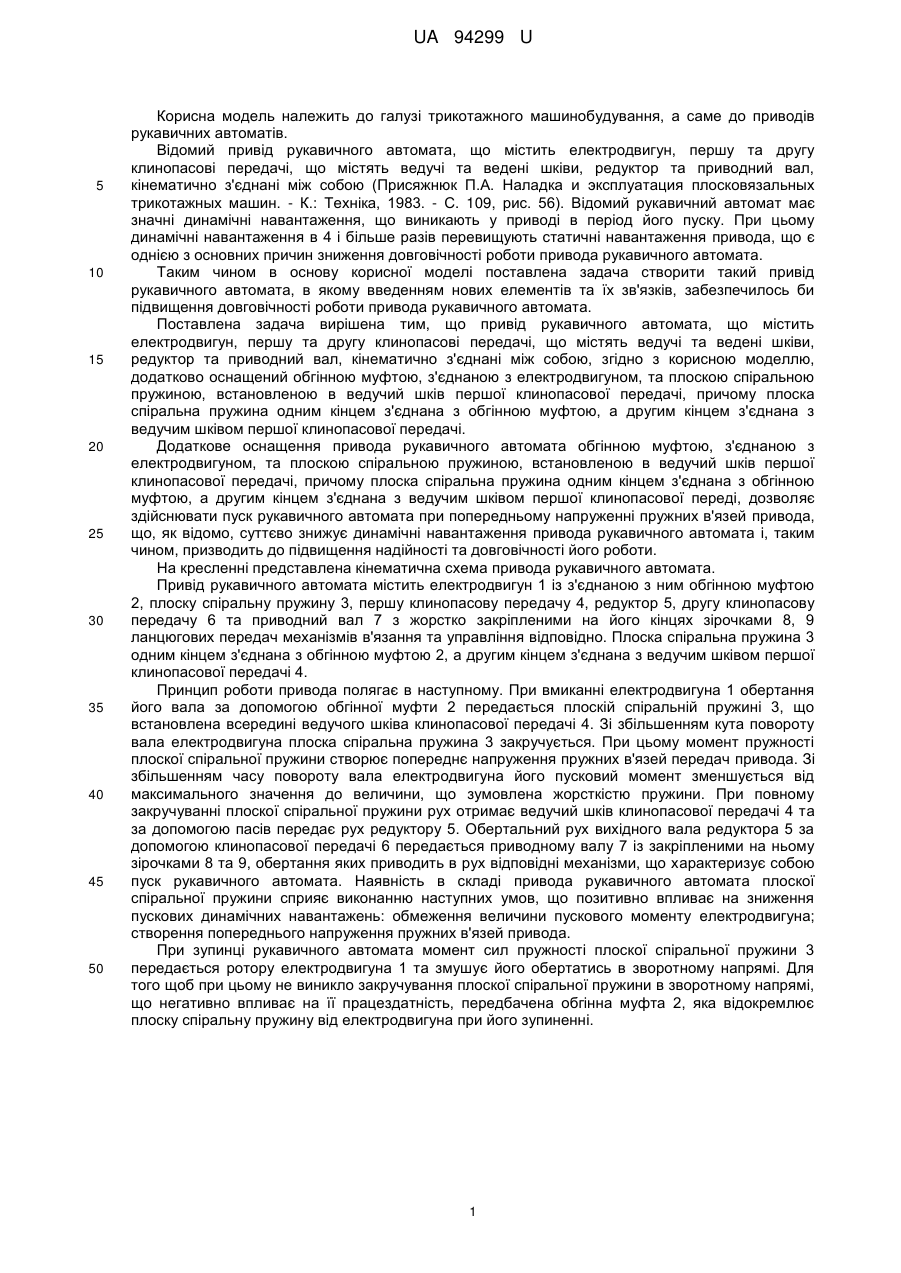
Реферат: UA 94299 U UA 94299 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до галузі трикотажного машинобудування, а саме до приводів рукавичних автоматів. Відомий привід рукавичного автомата, що містить електродвигун, першу та другу клинопасові передачі, що містять ведучі та ведені шківи, редуктор та приводний вал, кінематично з'єднані між собою (Присяжнюк П.А. Наладка и эксплуатация плосковязальных трикотажных машин. - К.: Техніка, 1983. - С. 109, рис. 56). Відомий рукавичний автомат має значні динамічні навантаження, що виникають у приводі в період його пуску. При цьому динамічні навантаження в 4 і більше разів перевищують статичні навантаження привода, що є однією з основних причин зниження довговічності роботи привода рукавичного автомата. Таким чином в основу корисної моделі поставлена задача створити такий привід рукавичного автомата, в якому введенням нових елементів та їх зв'язків, забезпечилось би підвищення довговічності роботи привода рукавичного автомата. Поставлена задача вирішена тим, що привід рукавичного автомата, що містить електродвигун, першу та другу клинопасові передачі, що містять ведучі та ведені шківи, редуктор та приводний вал, кінематично з'єднані між собою, згідно з корисною моделлю, додатково оснащений обгінною муфтою, з'єднаною з електродвигуном, та плоскою спіральною пружиною, встановленою в ведучий шків першої клинопасової передачі, причому плоска спіральна пружина одним кінцем з'єднана з обгінною муфтою, а другим кінцем з'єднана з ведучим шківом першої клинопасової передачі. Додаткове оснащення привода рукавичного автомата обгінною муфтою, з'єднаною з електродвигуном, та плоскою спіральною пружиною, встановленою в ведучий шків першої клинопасової передачі, причому плоска спіральна пружина одним кінцем з'єднана з обгінною муфтою, а другим кінцем з'єднана з ведучим шківом першої клинопасової переді, дозволяє здійснювати пуск рукавичного автомата при попередньому напруженні пружних в'язей привода, що, як відомо, суттєво знижує динамічні навантаження привода рукавичного автомата і, таким чином, призводить до підвищення надійності та довговічності його роботи. На кресленні представлена кінематична схема привода рукавичного автомата. Привід рукавичного автомата містить електродвигун 1 із з'єднаною з ним обгінною муфтою 2, плоску спіральну пружину 3, першу клинопасову передачу 4, редуктор 5, другу клинопасову передачу 6 та приводний вал 7 з жорстко закріпленими на його кінцях зірочками 8, 9 ланцюгових передач механізмів в'язання та управління відповідно. Плоска спіральна пружина 3 одним кінцем з'єднана з обгінною муфтою 2, а другим кінцем з'єднана з ведучим шківом першої клинопасової передачі 4. Принцип роботи привода полягає в наступному. При вмиканні електродвигуна 1 обертання його вала за допомогою обгінної муфти 2 передається плоскій спіральній пружині 3, що встановлена всередині ведучого шківа клинопасової передачі 4. Зі збільшенням кута повороту вала електродвигуна плоска спіральна пружина 3 закручується. При цьому момент пружності плоскої спіральної пружини створює попереднє напруження пружних в'язей передач привода. Зі збільшенням часу повороту вала електродвигуна його пусковий момент зменшується від максимального значення до величини, що зумовлена жорсткістю пружини. При повному закручуванні плоскої спіральної пружини рух отримає ведучий шків клинопасової передачі 4 та за допомогою пасів передає рух редуктору 5. Обертальний рух вихідного вала редуктора 5 за допомогою клинопасової передачі 6 передається приводному валу 7 із закріпленими на ньому зірочками 8 та 9, обертання яких приводить в рух відповідні механізми, що характеризує собою пуск рукавичного автомата. Наявність в складі привода рукавичного автомата плоскої спіральної пружини сприяє виконанню наступних умов, що позитивно впливає на зниження пускових динамічних навантажень: обмеження величини пускового моменту електродвигуна; створення попереднього напруження пружних в'язей привода. При зупинці рукавичного автомата момент сил пружності плоскої спіральної пружини 3 передається ротору електродвигуна 1 та змушує його обертатись в зворотному напрямі. Для того щоб при цьому не виникло закручування плоскої спіральної пружини в зворотному напрямі, що негативно впливає на її працездатність, передбачена обгінна муфта 2, яка відокремлює плоску спіральну пружину від електродвигуна при його зупиненні. 1 UA 94299 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Привід рукавичного автомата, що містить електродвигун, першу та другу клинопасові передачі, що містять ведучі та ведені шківи, редуктор та приводний вал, кінематично з'єднані між собою, який відрізняється тим, що додатково оснащений обгінною муфтою, з'єднаною з електродвигуном, та плоскою спіральною пружиною, встановленою в ведучий шків першої клинопасової передачі, причому плоска спіральна пружина одним кінцем з'єднана з обгінною муфтою, а другим кінцем з'єднана з ведучим шківом першої клинопасової передачі. Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюPipa Borys Fedorovych
Автори російськоюПипа Борис Федорович
МПК / Мітки
МПК: D04B 15/96, D04B 15/16
Мітки: автомата, рукавичного, привід
Код посилання
<a href="https://ua.patents.su/4-94299-privid-rukavichnogo-avtomata.html" target="_blank" rel="follow" title="База патентів України">Привід рукавичного автомата</a>
Привід рукавичного автомата
Номер патенту: 92543
Опубліковано: 26.08.2014
Автори: Павленко Георгій Іванович, Чабан Олексій Віталійович, Піпа Борис Федорович
МПК: D04B 15/96, D04B 15/16
Мітки: рукавичного, привід, автомата
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун, дві клинопасові передачі, редуктор та привідний вал, кінематично з'єднані між собою, який відрізняється тим, що додатково оснащений мотор-редуктором, обгінною та запобіжною муфтами, послідовно з'єднаними між собою, причому мотор-редуктор з'єднаний з електродвигуном.
Привід рукавичного автомата
Номер патенту: 93924
Опубліковано: 27.10.2014
Автори: Піпа Борис Федорович, Чабан Олексій Віталійович
МПК: D04B 15/96, D04B 15/16
Мітки: рукавичного, привід, автомата
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун з валом, дві клинопасові передачі, редуктор та приводний вал, кінематично з'єднані між собою, який відрізняється тим, що додатково оснащений електромагнітною фрикційною муфтою, що містить ведучу півмуфту, встановлену на валу електродвигуна з можливістю осьового переміщення, та ведену півмуфту, жорстко з'єднану з ведучим шківом клинопасової передачі, та електромагнітом, що містить обмотку...
Привід рукавичного автомата
Номер патенту: 93983
Опубліковано: 27.10.2014
Автори: Піпа Борис Федорович, Чабан Олексій Віталійович, Павленко Георгій Іванович
МПК: D04B 15/96, D04B 15/16
Мітки: автомата, привід, рукавичного
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун, дві клинопасові передачі, редуктор та привідний вал, кінематично з'єднані між собою, який відрізняється тим, що додатково оснащений маховиком та фрикційною муфтою, встановленими на валу електродвигуна, при цьому маховик вільно встановлений на валу з можливістю періодичного з'єднання з ним за допомогою фрикційної муфти.
Привід рукавичного автомата
Номер патенту: 92621
Опубліковано: 26.08.2014
Автори: Піпа Борис Федорович, Чабан Олексій Віталійович
МПК: D04B 15/96, D04B 15/16
Мітки: привід, автомата, рукавичного
Формула / Реферат:
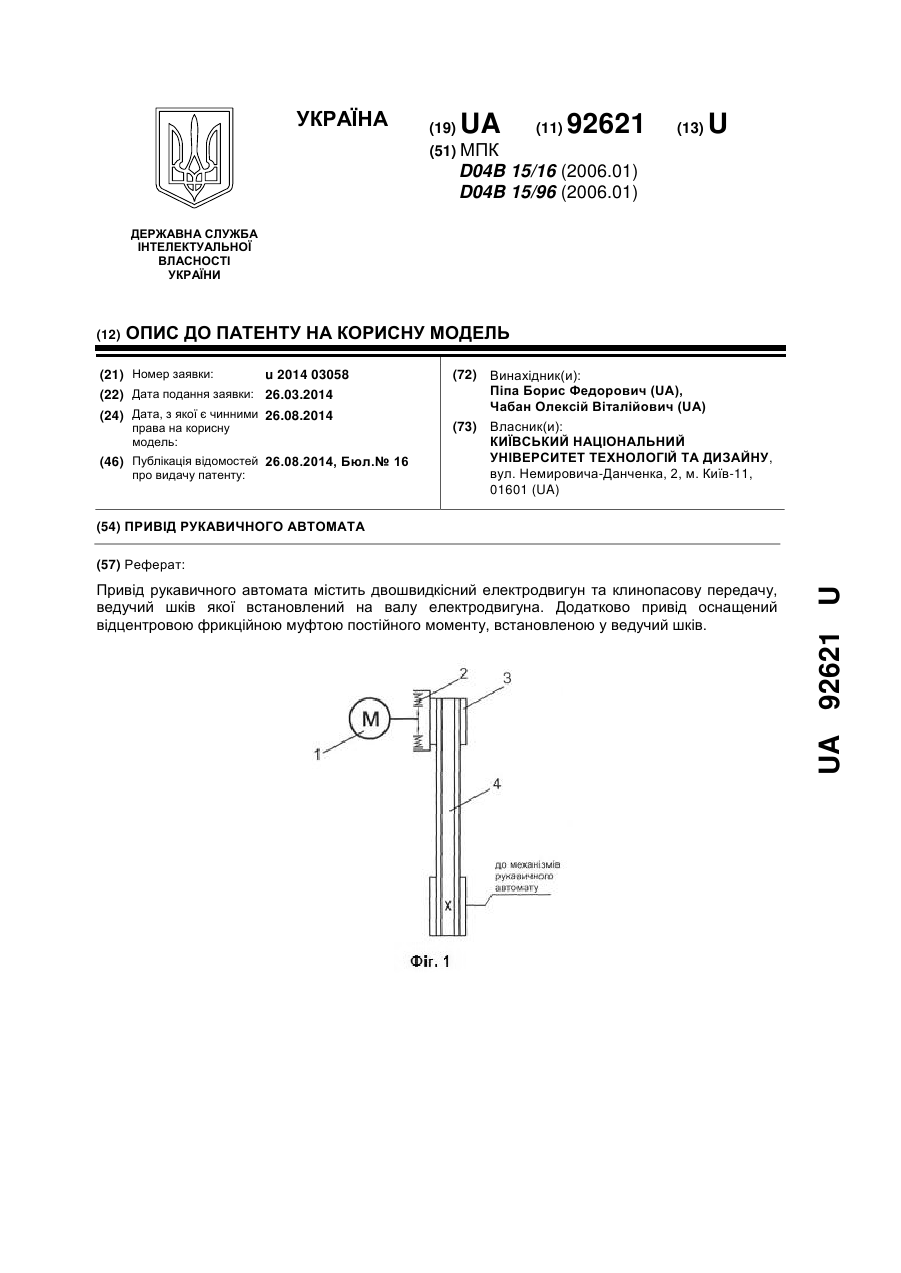
Привід рукавичного автомата, що містить двошвидкісний електродвигун та клинопасову передачу, ведучий шків якої встановлений на валу електродвигуна, який відрізняється тим, що додатково оснащений відцентровою фрикційною муфтою постійного моменту, встановленою у ведучий шків.
Привід в’язальної каретки рукавичного автомата
Номер патенту: 93984
Опубліковано: 27.10.2014
Автори: Піпа Борис Федорович, Чабан Олексій Віталійович
МПК: D04B 15/96
Мітки: каретки, в'язальної, автомата, рукавичного, привід
Формула / Реферат:
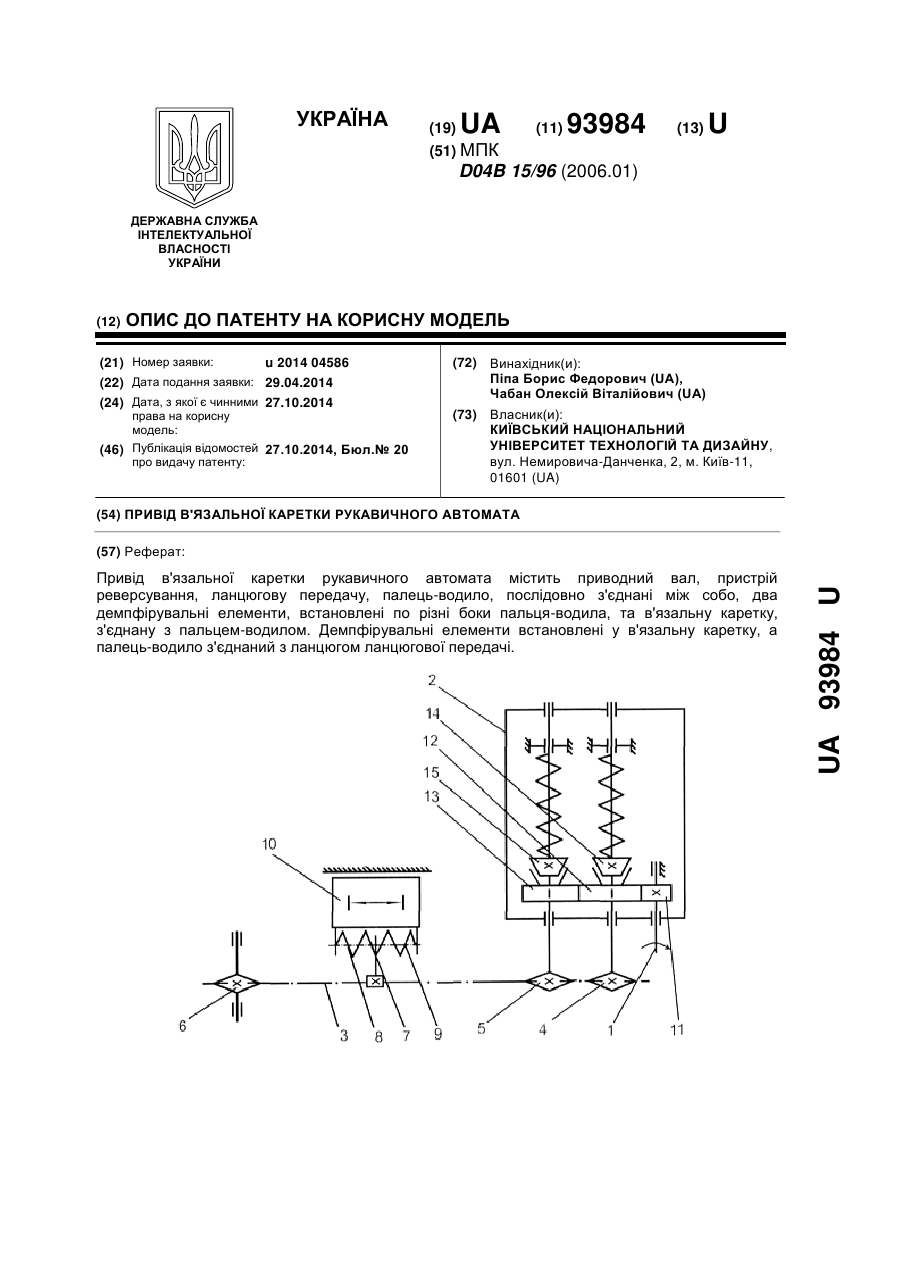
1. Привід в'язальної каретки рукавичного автомата, що містить приводний вал, пристрій реверсування, ланцюгову передачу, палець-водило, послідовно з'єднані між собою, два демпфірувальні елементи, встановлені по різні боки пальця-водила, та в'язальну каретку, з'єднану з пальцем-водилом, який відрізняється тим, що демпфірувальні елементи встановлені у в'язальну каретку, а палець-водило з'єднаний з ланцюгом ланцюгової передачі.2. Привід...
Попередній патент: Спосіб визначення генетичної схильності до виникнення ішемічних інсультів (іі) у дітей
Наступний патент: Муфта
Випадковий патент: Спосіб термообробки швидкорізальної сталі