Привод дискретних переміщень
Номер патенту: 95045
Опубліковано: 10.12.2014
Автори: Бабич Валентин Миколайович, Ткаченко Микола Васильович

Формула / Реферат
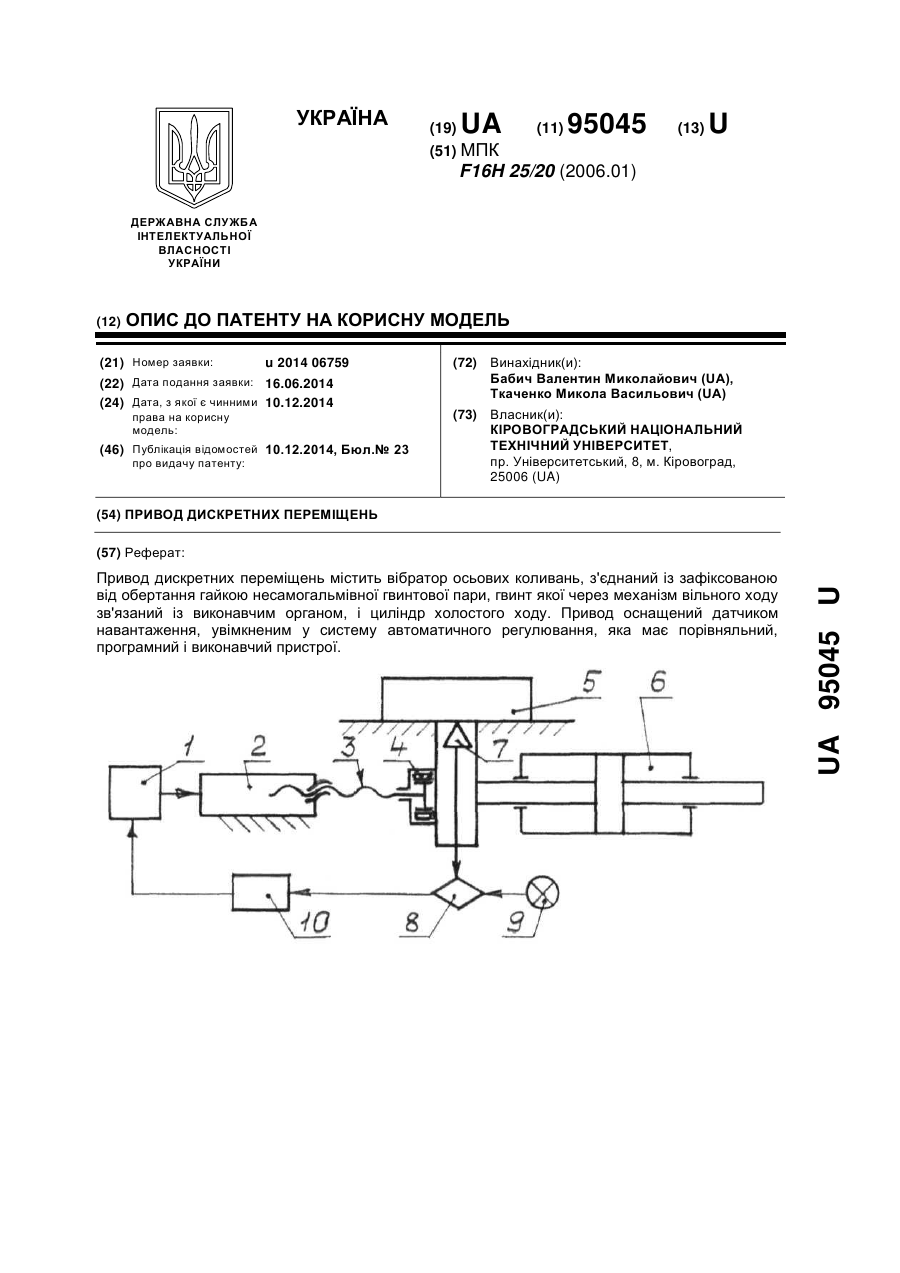
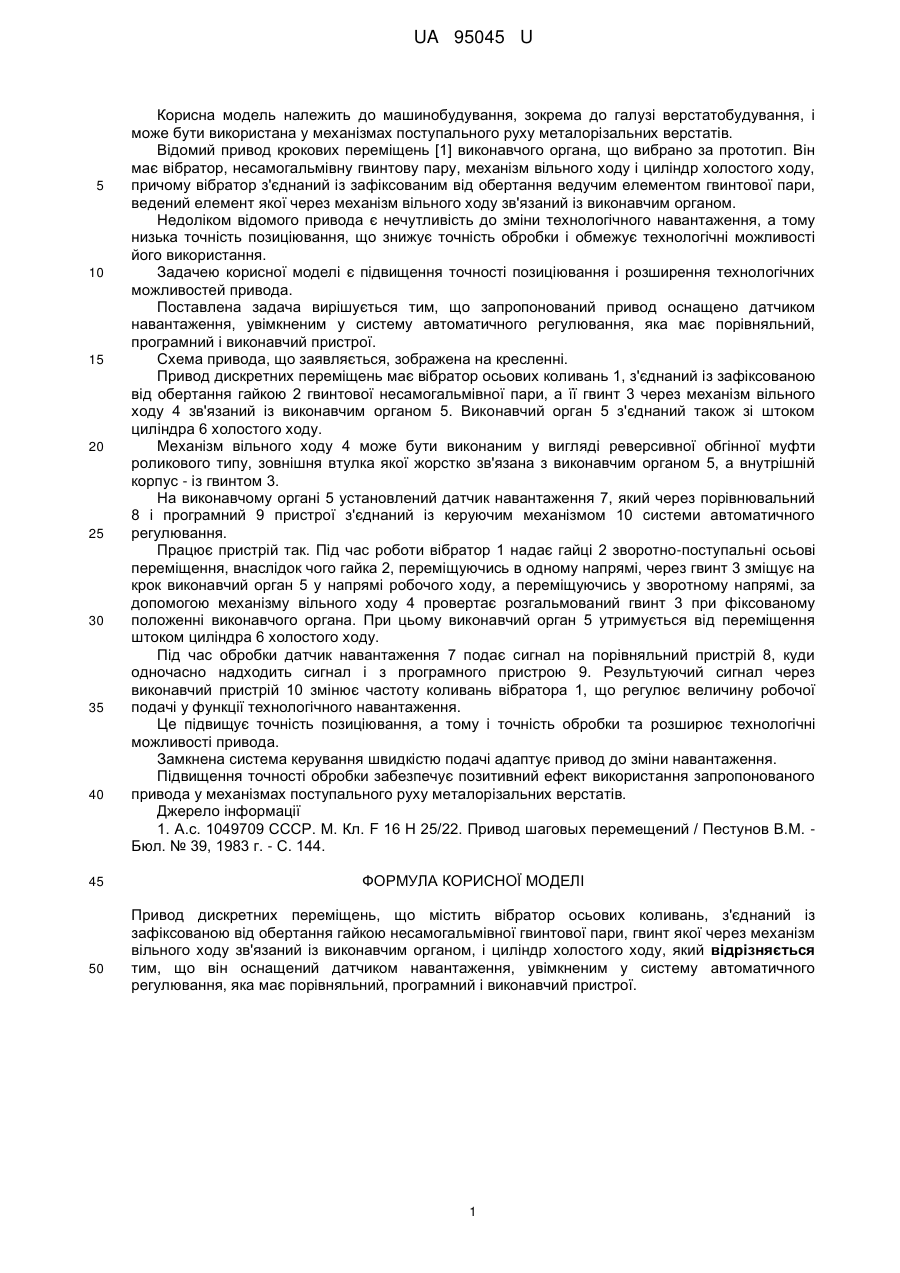
Привод дискретних переміщень, що містить вібратор осьових коливань, з'єднаний із зафіксованою від обертання гайкою несамогальмівної гвинтової пари, гвинт якої через механізм вільного ходу зв'язаний із виконавчим органом, і циліндр холостого ходу, який відрізняється тим, що він оснащений датчиком навантаження, увімкненим у систему автоматичного регулювання, яка має порівняльний, програмний і виконавчий пристрої.
Текст
Реферат: UA 95045 U UA 95045 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до машинобудування, зокрема до галузі верстатобудування, і може бути використана у механізмах поступального руху металорізальних верстатів. Відомий привод крокових переміщень [1] виконавчого органа, що вибрано за прототип. Він має вібратор, несамогальмівну гвинтову пару, механізм вільного ходу і циліндр холостого ходу, причому вібратор з'єднаний із зафіксованим від обертання ведучим елементом гвинтової пари, ведений елемент якої через механізм вільного ходу зв'язаний із виконавчим органом. Недоліком відомого привода є нечутливість до зміни технологічного навантаження, а тому низька точність позиціювання, що знижує точність обробки і обмежує технологічні можливості його використання. Задачею корисної моделі є підвищення точності позиціювання і розширення технологічних можливостей привода. Поставлена задача вирішується тим, що запропонований привод оснащено датчиком навантаження, увімкненим у систему автоматичного регулювання, яка має порівняльний, програмний і виконавчий пристрої. Схема привода, що заявляється, зображена на кресленні. Привод дискретних переміщень має вібратор осьових коливань 1, з'єднаний із зафіксованою від обертання гайкою 2 гвинтової несамогальмівної пари, а її гвинт 3 через механізм вільного ходу 4 зв'язаний із виконавчим органом 5. Виконавчий орган 5 з'єднаний також зі штоком циліндра 6 холостого ходу. Механізм вільного ходу 4 може бути виконаним у вигляді реверсивної обгінної муфти роликового типу, зовнішня втулка якої жорстко зв'язана з виконавчим органом 5, а внутрішній корпус - із гвинтом 3. На виконавчому органі 5 установлений датчик навантаження 7, який через порівнювальний 8 і програмний 9 пристрої з'єднаний із керуючим механізмом 10 системи автоматичного регулювання. Працює пристрій так. Під час роботи вібратор 1 надає гайці 2 зворотно-поступальні осьові переміщення, внаслідок чого гайка 2, переміщуючись в одному напрямі, через гвинт 3 зміщує на крок виконавчий орган 5 у напрямі робочого ходу, а переміщуючись у зворотному напрямі, за допомогою механізму вільного ходу 4 провертає розгальмований гвинт 3 при фіксованому положенні виконавчого органа. При цьому виконавчий орган 5 утримується від переміщення штоком циліндра 6 холостого ходу. Під час обробки датчик навантаження 7 подає сигнал на порівняльний пристрій 8, куди одночасно надходить сигнал і з програмного пристрою 9. Результуючий сигнал через виконавчий пристрій 10 змінює частоту коливань вібратора 1, що регулює величину робочої подачі у функції технологічного навантаження. Це підвищує точність позиціювання, а тому і точність обробки та розширює технологічні можливості привода. Замкнена система керування швидкістю подачі адаптує привод до зміни навантаження. Підвищення точності обробки забезпечує позитивний ефект використання запропонованого привода у механізмах поступального руху металорізальних верстатів. Джерело інформації 1. А.с. 1049709 СССР. М. Кл. F 16 Н 25/22. Привод шаговых перемещений / Пестунов В.М. Бюл. № 39, 1983 г. - С. 144. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Привод дискретних переміщень, що містить вібратор осьових коливань, з'єднаний із зафіксованою від обертання гайкою несамогальмівної гвинтової пари, гвинт якої через механізм вільного ходу зв'язаний із виконавчим органом, і циліндр холостого ходу, який відрізняється тим, що він оснащений датчиком навантаження, увімкненим у систему автоматичного регулювання, яка має порівняльний, програмний і виконавчий пристрої. 1 UA 95045 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюBabych Valentyn Mykolaiovych, Tkachenko Mykola Vasyliovych
Автори російськоюБабич Валентин Николаевич, Ткаченко Николай Васильевич
МПК / Мітки
МПК: F16H 25/20
Мітки: привод, дискретних, переміщень
Код посилання
<a href="https://ua.patents.su/4-95045-privod-diskretnikh-peremishhen.html" target="_blank" rel="follow" title="База патентів України">Привод дискретних переміщень</a>
Привод конвеєра, що коливається
Номер патенту: 94959
Опубліковано: 10.12.2014
Автори: Гринько Артем Григорович, Владіміров Едуард Олександрович, Лозовий Володимир Сергійович
МПК: B65G 25/00
Мітки: привод, коливається, конвеєра
Формула / Реферат:
Привод конвеєра, що коливається, який містить корпус, зубчастий механізм і виконавчий механізм для перетворення обертального руху його ведучої ланки у зворотно-поступальний рух риштака, який відрізняється тим, що ведуча ланка виконавчого механізму виконана у вигляді кулачка з роликовим коромислом та геометричним замиканням.
Насосно-акумуляторний привод преса
Номер патенту: 37639
Опубліковано: 10.12.2008
Автори: Шинкаренко Олег Михайлович, Корчак Олена Сергіївна
МПК: B21J 9/00
Мітки: привод, преса, насосно-акумуляторний
Формула / Реферат:
Насосно-акумуляторний привод преса, що містить пневмогідравлічний акумулятор рідини високого тиску, повітряні балони компресора та насосну станцію з насосами, які зв'язані між собою системою трубопроводів з органами керування, який відрізняється тим, що привод виконано індивідуальним для окремого преса, акумулятор максимально наближено до преса та виконано поршневим з розділенням гідравлічного та повітряного середовищ з використанням...
Привід точних лінійних переміщень для механізму паралельної кінематики
Номер патенту: 73308
Опубліковано: 25.09.2012
Автори: Струтинський Сергій Васильович, Юрчишин Оксана Ярославівна
МПК: F16H 25/22
Мітки: механізму, переміщень, привід, точних, паралельно, лінійних, кінематики
Формула / Реферат:
Привід точних лінійних переміщень для механізму паралельної кінематики, який складається із двигуна, зубчастої передачі та гвинтової передачі, розміщеної в порожнистій штанзі з гайкою із можливістю переміщення штанги відносно трубчастого корпусу штанги, який відрізняється тим, що в трубчастій штанзі встановлені дискретні пневмо- або гідроприводи швидких переміщень, при цьому двигун встановлено на нерухомій основі, а зубчаста передача...
Привод велосипеда
Номер патенту: 102760
Опубліковано: 12.08.2013
Автори: Дорожко Олександр Іванович, Дорожко Наталья Олександрівна
МПК: B62M 1/00
Мітки: велосипеда, привод
Формула / Реферат:
Привод велосипеда із зворотно-поступально рухомими важелями, що містить корпус, механізм синхронізації, який складається з трьох конічних шестерень, вал привода та обгінні муфти, який відрізняється тим, що перший зворотно-поступальний рухомий важіль педалей зміщений від верхньої точки положення педалей у бік робочого ходу на кут 0° < a ≤ 30°, другий зворотно-поступальний рухомий важіль педалей зміщений - на кут 180°-a, а довжина...
Механізм лінійних переміщень
Номер патенту: 49572
Опубліковано: 26.04.2010
Автори: Валявський Іван Анатолійович, Павленко Іван Іванович, Коваль Роман Олександрович
МПК: F16H 55/00
Мітки: лінійних, переміщень, механізм
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої і гвинтової передач, який відрізняється тим, що гвинтова передача виконана хвильовою.
Попередній патент: Спосіб визначення фізико-механічних характеристик матеріалів
Наступний патент: Пристрій для одержання металевих волокон пресуванням гранул