Спосіб посадки-зняття підйомної посудини з жорсткої підстави
Номер патенту: 96103
Опубліковано: 26.09.2011
Автори: Мялковський Валентин Йосипович, Дворников Володимир Іванович, Чехлатий Микола Олександрович
Формула / Реферат
Спосіб посадки-зняття підйомної посудини з жорсткої підстави, відповідно до якого система керування шахтною піднімальною установкою пускає у хід барабан шахтної піднімальної установки і тяговий канат із приєднаним до нього причіпним пристроєм посудиною, за допомогою системи регулювання електропривода згаданої системи керування при посадці-знятті посудини із твердої підстави забезпечують негативний напуск каната у причіпному пристрої, який відрізняється тим, що зняття навантаженої посудини із твердої нижньої підстави здійснюють при негативному напуску каната, що задовольняє умові:
 ,
,
де ![]() ,
, ![]() - відповідно коефіцієнти жорсткості схилу і похилої струни каната;
- відповідно коефіцієнти жорсткості схилу і похилої струни каната; ![]() , - коефіцієнт жорсткості системи "посудина-кулаки";
, - коефіцієнт жорсткості системи "посудина-кулаки"; ![]() - маса навантаженої посудини, що піднімається;
- маса навантаженої посудини, що піднімається; ![]() - прискорення вільного падіння, а посадку навантаженої посудини на тверду верхню підставу забезпечують при негативному напуску каната у причіпному пристрої, що задовольняє умові:
- прискорення вільного падіння, а посадку навантаженої посудини на тверду верхню підставу забезпечують при негативному напуску каната у причіпному пристрої, що задовольняє умові:
![]() ,
,
де ![]() - абсолютна величина переміщення посудини щодо машини, а при знятті порожньої посудини із твердої верхньої підстави негативний напуск каната у причіпному пристрої задовольняє умові:
- абсолютна величина переміщення посудини щодо машини, а при знятті порожньої посудини із твердої верхньої підстави негативний напуск каната у причіпному пристрої задовольняє умові:
![]() ,
,
де ![]() - коефіцієнт динамічності, а при посадці порожньої посудини на кулаки нижньої приймальної площадки негативний напуск каната у причіпному пристрої задовольняє умові:
- коефіцієнт динамічності, а при посадці порожньої посудини на кулаки нижньої приймальної площадки негативний напуск каната у причіпному пристрої задовольняє умові:
![]() .
.
Текст
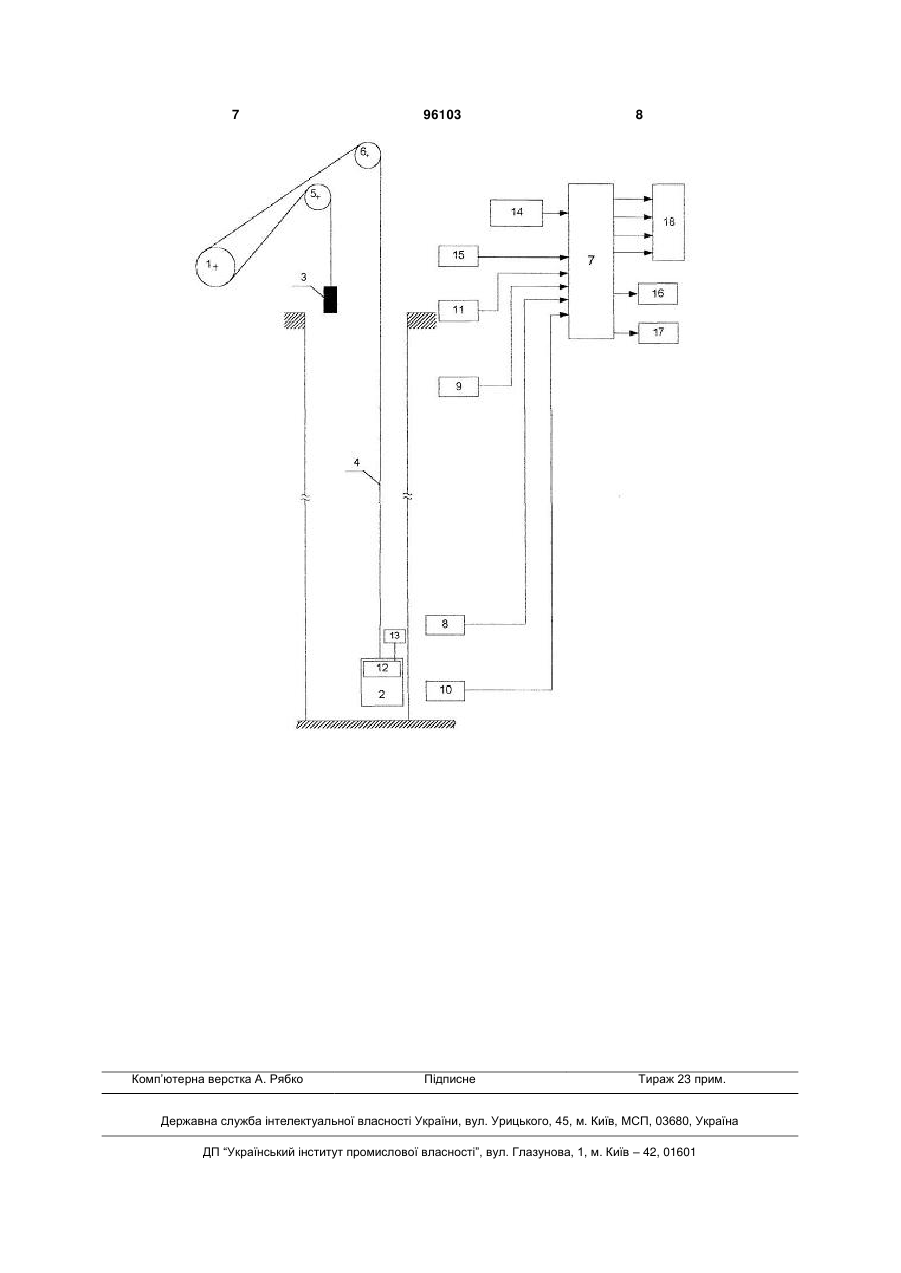
Спосіб посадки-зняття підйомної посудини з жорсткої підстави, відповідно до якого система керування шахтною піднімальною установкою пускає у хід барабан шахтної піднімальної установки і тяговий канат із приєднаним до нього причіпним пристроєм посудиною, за допомогою системи регулювання електропривода згаданої системи керування при посадці-знятті посудини із твердої підстави забезпечують негативний напуск каната у причіпному пристрої, який відрізняється тим, що зняття навантаженої посудини із твердої нижньої підстави здійснюють при негативному напуску каната, що задовольняє умові: C C 1 3 mg сум , hнап m1g 1 1 ст C1C3 Cкул де С1 , С3 - відповідно коефіцієнти жорсткості 96103 (21) a201013964 (22) 23.11.2010 (24) 26.09.2011 (46) 26.09.2011, Бюл.№ 18, 2011 р. (72) ЧЕХЛАТИЙ МИКОЛА ОЛЕКСАНДРОВИЧ, ДВОРНИКОВ ВОЛОДИМИР ІВАНОВИЧ, МЯЛКОВСЬКИЙ ВАЛЕНТИН ЙОСИПОВИЧ (73) "НАУКОВО-ДОСЛІДНИЙ ІНСТИТУТ ГІРНИЧОЇ МЕХАНІКИ ІМЕНІ М.М.ФЕДОРОВА" (56) UA 74621 C2; 15.03.2004 UA 91268 C2; 12.07.2010 UA 82162 C2; 11.03.2008 SU 523851 A1; 05.08.1976 RU 2104243 C1; 10.02.1998 US 6325179 b1; 04.12.2001 GB 440498 A; 01.01.1936 2 3 посудини із твердої підстави забезпечується негативний напуск каната у причіпному пристрої. Спосіб дозволяє знизити динамічне навантаження на канат і підвісні посудини і тим самим збільшити їхню довговічність. Однак, спосіб не враховує твердість механічної системи "посудина-кулаки" і взаємодія кліті з кулаками, що може призвести до значних динамічних навантажень на канат, підвісний пристрій і посудину. Це може стати причиною обриву каната або руйнування елементів підвісного пристрою. У основу винаходу поставлена задача удосконалення способу керування посадкою-зняттям підйомної посудини із твердої підстави шляхом створення негативного напуску каната у причіпному пристрої, з урахуванням ступеня твердості механічної системи "посудина-кулаки". Поставлена задача вирішується так, що в способі керування посадкою-зняттям підйомної посудини із твердої підстави, відповідно до якого система керування шахтною піднімальною установкою пускає у хід барабан шахтної піднімальної установки і тяговий канат із приєднаним до нього причіпним пристроєм посудиною, за допомогою системи регулювання електропривода згаданої системи керування при посадці-знятті посудини із твердої підстави забезпечується негативний напуск каната у причіпному пристрої, відповідно до винаходу, зняття навантаженої посудини із твердої нижньої підстави здійснюється при негативному напуску каната, що задовольняє умові: C C 1 3 mg сум , hнап m1g 1 1 ст C1C3 Cкул де С1 , С3 - відповідно коефіцієнти жорсткості схилу і похилої струни каната; Скул , - коефіцієнт жорсткості системи "посудина-кулаки"; m1 - маса навантаженої посудини, що піднімається; g - прискорення вільного падіння, а посадка навантаженої посудини на тверду верхню підставу забезпечується при негативному напуску каната у причіпному пристрої, що задовольняє умові: hнап S m1gсум , де S - абсолютна величина ст переміщення посудини щодо машини, а при знятті порожньої посудини із твердої верхньої підстави негативний напуск каната у причіпному пристрої задовольняє умові: hнап B сум , де B - коефіціст єнт динамічності, а при посадці порожньої посудини на кулаки нижньої прийомної площадки негативний напуск каната у причіпному пристрої задовольняє умові: hнап сум . ст Підвищення жорсткості кулаків призводить до збільшення динамічних навантажень на канат, підвісний пристрій і посудину. Тому, для зниження взаємодії посудини з кулаками необхідно забезпечити відповідний негативний напуск каната. Спосіб, що заявляється, реалізується таким шляхом. Вимірюють величину натягу каната й обчислюють значення напуску каната. Задають системі керування шахтною піднімальною установкою ве 96103 4 личину напуску каната у причіпному пристрої при знятті навантаженої посудини із твердої нижньої підстави співвідношенням: C C 1 3 mg сум , hнап m1g 1 1 ст C1C3 Cкул де С1 , С3 – відповідно коефіцієнти твердості схилу й похилої струни каната; Скул - коефіцієнт твердості системи "посудина-кулаки"; m1 - маса навантаженої посудини, що піднімається; g - прискорення вільного падіння. Система керування шахтною піднімальною установкою пускає у хід барабан шахтної піднімальної установки і тяговий канат із приєднаним до нього причіпним пристроєм навантаженою посудиною забезпечує необхідний натяг каната. Потім здійснюється зняття посудини із твердої нижньої підстави і його підйом. При посадці навантаженої посудини на тверду верхню підставу забезпечується негативний напуск каната у причіпному пристрої, що задовольняє умові hнап S m1gсум , де S - абсолютна величина ст переміщення посудини щодо машини. При негативному напуску днище посудини ледь торкається кулаків, і посудина утримується у такому положенні протягом розвантажувально-навантажувальних операцій. У цьому випадку кулаки виконують роль пристрою, що страхує, і можуть бути скасовані, що призведе до збільшення довговічності канатів, підвісних пристроїв і посудини. Крім того, це буде сприяти підвищенню загального рівня безпеки, тому що висувні кулаки являють собою об'єкт аварійності, особливо при системі відпрацьовування вугільних пластів з декількох горизонтів. Під час зняття порожньої посудини із твердої верхньої підстави забезпечується негативний напуск каната у причіпному пристрої, що задовольняє умові hнап B сум , де B - коефіцієнт динаміст чності, при посадці порожньої посудини на кулаки нижньої приймальної площадки забезпечується негативний напуск каната у причіпному пристрої, що задовольняє умові hнап сум . ст Найбільш доцільно застосувати для цього описаний нижче пристрій. Пристрій, наведений на кресленні, містить барабан шахтної підйомної установки 1, підйомну посудину 2 і противагу 3, тяговий канат 4, направляючі шківи 5 і 6, мікроконтролер 7, датчики початку уповільнення 8 і 9, датчики наявності кулаків 10 і 11, передавальну радіостанцію 12, датчик натягнення каната 13, приймальну радіостанцію 14, датчик перевищення 15, клавіатуру 16, схему індикації 17, систему управління підйомною установкою 18. Пристрій працює таким чином. У початковому стані завантажена підйомна посудина 2 знаходиться на кулаках нижнього приймального майданчика, а противага 3 - на верхньому горизонті. Вимірюють датчиками 13 величину натягнення каната. Система керування шахтною піднімальною 5 установкою пускає у хід барабан шахтної піднімальної установки й тяговий канат із приєднаною до нього причіпним пристроєм навантаженою посудиною і забезпечує необхідний натяг каната, що задовольняє умові: C C 1 3 mg сум , hнап m1g 1 1 ст C1C3 Cкул де С1 , С3 - відповідно коефіцієнти жорсткості схилу і похилої струни каната; Скул - коефіцієнт жорсткості системи "посудина-кулаки"; m1 - маса навантаженої посудини, що піднімається; g - прискорення вільного падіння. Сигнали з виходу датчика 13 надходять через радіостанцію 12, що передає, на приймальну радіостанцію 14. Сигнал натягнення каната 4 надходить до мікроконтролера 7, який обчислює чисельне значення величини напуску каната, запам'ятовує його і виводить на схему індикації 17. Далі, за допомогою клавіатури 16, вводяться значення величини напуску каната 4 у причіпному пристрої. Після встановлення вказаних початкових даних пристрій підготовлений до роботи. Припустимо, що виконується посадка навантаженої посудини 2 на верхню приймальну площадку. Під час проходження підйомною посудиною 2 датчика початку уповільнення 9 мікроконтролер 7 формує команду на зниження швидкості руху посудини, яка надходить до першого входу системи управління підйомною установкою 18. Під час появи сигналу від датчика перевищення 15 мікроконтролер 7 формує команду "СТОП", яка надходить до системи управління підйомною установкою 18 на другий вхід. Далі встановлюються кулаки, після чого піднімальна посудина 2 опускається і мікроконтролер 7 формує команду "СТОП" при наявності відповідного сигналу від датчика натягу каната 13, що задовольняє умові hнап S m1gсум , де S - абсолютст на величина переміщення посудини щодо машини. При такій посадці підйомної посудини 2 кулаки виконують страхуючу роль, оскільки днище підйомної посудини 2 ледве торкається кулаків, і посудина утримується у такому положенні гальмом (або включеним електродвигуном). При знятті порожньої посудини 2 з кулаків верхньої приймальної площадки негативний напуск канату у причіпному пристрої задовольняє умові 96103 6 hнап B сум , де B - коефіцієнт динамічності. Сист стема управління підйомною установкою 18 формує відповідну команду, згідно з якою підйомна посудина 2, щоб прибрати кулаки, підіймається на висоту, на якій спрацьовує датчик перевищення 15, після чого мікроконтролер 7 формує команду "СТОП" і підйомна установка зупиняється. Під час появи сигналу "Кулаки прибрані" від датчика наявності кулаків 11 мікроконтролер 7 формує відповідний сигнал, що надходить до третього входу системи управління підйомною установкою 18. Остання включається і виконує операцію спуску підйомної посудини 2 вниз. При посадці порожньої посудини на кулаки нижньої приймальної площадки негативний напуск каната у причіпному пристрої задовольняє умові hнап сум . ст Пристрій, за допомогою датчика натягнення каната 13, здійснює безперервний контроль напуску каната 4. При збільшенні напуску каната 4 більше максимально допустимого значення або зменшенні менше мінімально допустимого значення мікроконтролер 7 формує сигнал аварійної зупинки підйомної машини, який надходить до четвертого входу системи управління підйомною установкою 18. Таке рішення дозволяє захистити підйомну установку від напуску каната або його розриву внаслідок зависання підйомної посудини в стволі. Запропонований спосіб посадки-зняття підйомної посудини з жорсткої підстави дозволяє знизити динамічне навантаження на канат та підвісні посудини і тим самим збільшити їх довговічність, що сприяє підвищенню безпеки експлуатації підйомної установки. У даний час в інституті розроблена конструкторська документація і виготовлений експериментальний зразок пристрою. Джерела інформації: 7 1 Патент UA №74621, МПК В66В 1/06, 2006. Спосіб роботи резонансної шахтної підйомної установки, Грядущий Б.А. та інші, заявл. 21.08.2003, опубл. 16.01.2003, бюл. №1, 2006. 7 2 Патент UA №91268, МПК В66В 1/28, 2008. Спосіб керування посадкою-зняттям підйомної посудини з жорсткої основи та пристрій для його здійснення, Чехлатий М.О., Дворников В.І., заяв. 22.09.2008, опубл. 10.02.2009, бюл. №3, 2009. 7 Комп’ютерна верстка А. Рябко 96103 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of putting - removal hoisting vessel from rigid base
Автори англійськоюChekhlatyi Mykola Oleksandrovych, Dvornykov Volodymyr Ivanovych, Mialkovskyi Valentyn Yosypovych
Назва патенту російськоюСпособ посадки - снятия подъемного сосуда с жесткого основания
Автори російськоюЧехлатый Николай Александрович, Дворников Владимир Иванович, Мялковский Валентин Иосифович
МПК / Мітки
МПК: B66B 17/00, B66B 5/12, B66B 1/00
Мітки: підставі, спосіб, посудини, жорсткої, підйомної, посадки-зняття
Код посилання
<a href="https://ua.patents.su/4-96103-sposib-posadki-znyattya-pidjjomno-posudini-z-zhorstko-pidstavi.html" target="_blank" rel="follow" title="База патентів України">Спосіб посадки-зняття підйомної посудини з жорсткої підстави</a>
Спосіб керування посадкою – зняттям підйомної посудини з жорсткої основи та пристрій для його здійснення
Номер патенту: 91268
Опубліковано: 12.07.2010
Автори: Чехлатий Микола Олександрович, Дворников Володимир Іванович
Мітки: підйомної, здійснення, зняттям, спосіб, посудини, керування, посадкою, основі, пристрій, жорсткої
Формула / Реферат:
1. Спосіб керування посадкою - зняттям підйомної посудини з жорсткої основи, відповідно до якого за допомогою системи керування шахтної підйомної установки приводять у дію барабан шахтної підйомної установки та тяговий канат з приєднаними до нього причіпними пристроями посудинами, який відрізняється тим, що за допомогою системи регулювання електроприводу згаданої системи керування при знятті посудини з жорсткої нижньої основи забезпечують...
Пристрій для контролю місця розташування підйомної посудини
Номер патенту: 82162
Опубліковано: 11.03.2008
Автори: Мялковський Валентин Йосипович, Чехлатий Микола Олександрович, Чехлатий Андрій Миколайович, Демченко Дмитро Миколайович, Демченко Микола Петрович
МПК: B66B 3/00, B66B 1/00, B66B 5/00
Мітки: розташування, пристрій, посудини, підйомної, контролю, місця
Формула / Реферат:
Пристрій для контролю місця розташування підйомної посудини, що містить блок прийому інформації і блок передачі інформації, до складу якого входять два датчики зближення, розташовані на вертикальній стінці підйомної посудини, який відрізняється тим, що в блок прийому інформації введені два регістри, комутатор, виходи якого підключені до відповідних входів керування першого і другого цифрових індикаторів, інформаційні входи першого і другого...
Напрямний пристрій шахтної підйомної посудини
Номер патенту: 40180
Опубліковано: 25.03.2009
Автори: Соломенцев Анатолій Іванович, Соломенцев Костянтин Анатольович, Труш Іван Омелянович, Труш Кирило Анатольович
Мітки: пристрій, напрямний, шахтної, підйомної, посудини
Формула / Реферат:
Напрямний пристрій шахтної підйомної посудини, що містить станину, на якій встановлені пересувні роликоопори, який відрізняється тим, що корпус кожної роликоопори містить плиту з напрямними канавками, в які заходять ребра станини, ребра мають клиноподібні потовщення, що взаємодіють зі скосами притискної планки, при цьому вісь роликоопори з обох торців має внутрішню різьбу під болти і лиски під ключ, а головка болта і шайби виконані у вигляді...
Пристрій для керування переміщенням підйомної посудини в шахтному стволі
Номер патенту: 81833
Опубліковано: 11.02.2008
Автори: Бежок Віктор Романович, Чехлатий Андрій Миколайович, Грядущий Борис Абрамович, Дворников Володимир Іванович, Дворников Михайло Володимирович, Пристром Володимир Адольфович
МПК: G01G 13/00, B03B 13/00
Мітки: стволі, пристрій, шахтному, переміщенням, керування, посудини, підйомної
Формула / Реферат:
Пристрій для керування переміщенням підйомної посудини в шахтному стволі, що містить блок контролю та керування навантажувального пункту, до складу якого входять привід обвалення гірської маси в дозатор, привід живильника та конвеєра, привід клапана герметизації, привід секторного затвора, привід гасника швидкості гірської маси, датчик наявності гірської маси в бункері, два датчики приходу транспортної посудини під завантаження, датчик...
Напрямний башмак підйомної посудини
Номер патенту: 62037
Опубліковано: 15.12.2003
Автори: Куриленко Валерій Костянтинович, Алексєєв Володимир Юрійович, Пристром Володимир Адольфович
МПК: B66B 7/02
Мітки: башмак, підйомної, посудини, напрямний
Формула / Реферат:
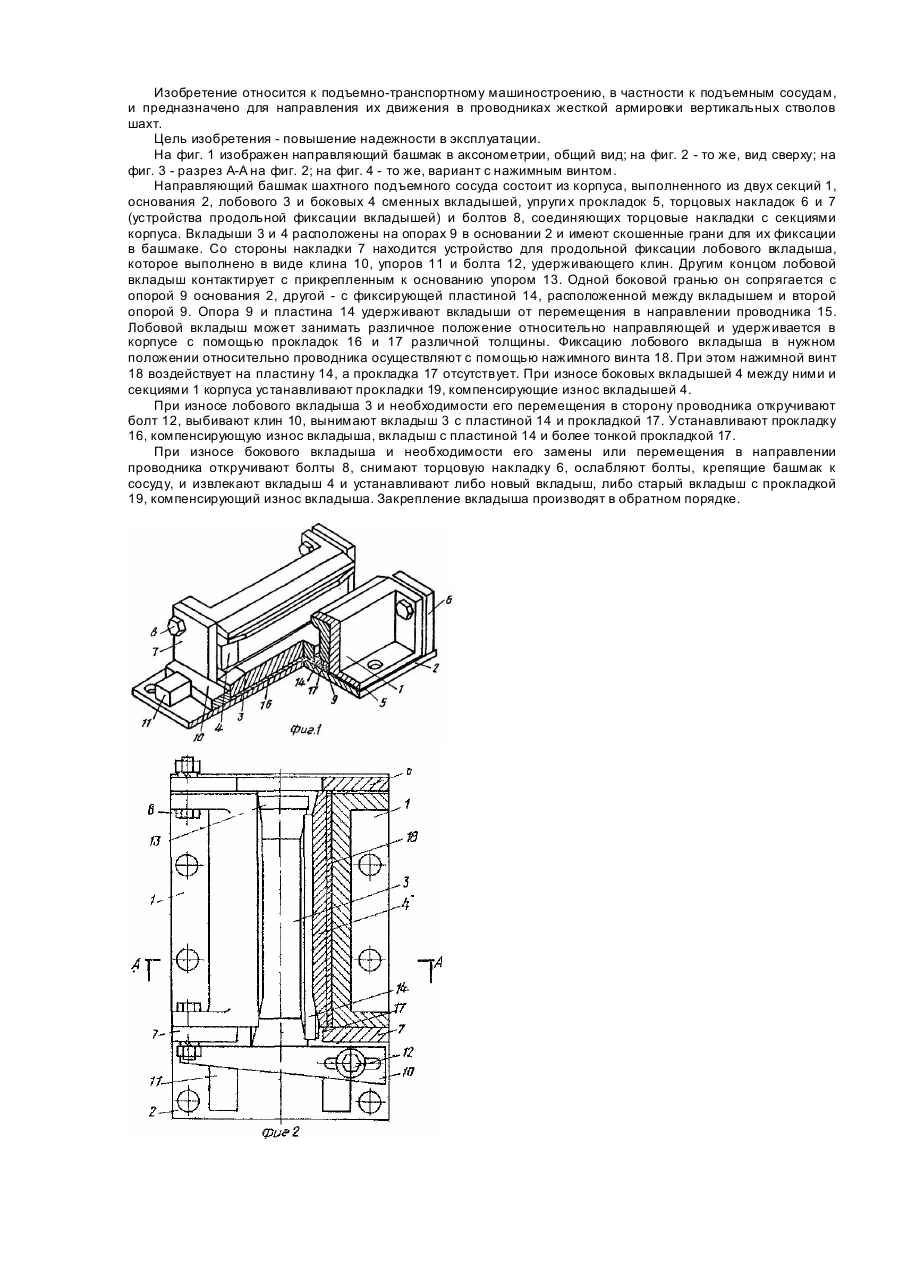
1. Направляющий башмак подъемного сосуда, содержащий установленные на проводнике в корпусе боковые и лобовой вкладыши и элементы для их продольной фиксации, отличающийся тем, что, с целью повышения надежности, боковые грани лобового вкладыша и сопрягаемые с ними поверхности корпуса выполнены под углом, предотвращающим его перемещения в направлении проводника, а элемент для продольной фиксации лобового вкладыша содержит прикрепленный к корпусу...
Попередній патент: Способи і пристрій для динамічного балансування навантаження за допомогою e-aich
Наступний патент: Світильник
Випадковий патент: Противиразковий та протизапальний засіб