Спосіб керування посадкою – зняттям підйомної посудини з жорсткої основи та пристрій для його здійснення
Номер патенту: 91268
Опубліковано: 12.07.2010
Автори: Дворников Володимир Іванович, Чехлатий Микола Олександрович

Формула / Реферат
1. Спосіб керування посадкою - зняттям підйомної посудини з жорсткої основи, відповідно до якого за допомогою системи керування шахтної підйомної установки приводять у дію барабан шахтної підйомної установки та тяговий канат з приєднаними до нього причіпними пристроями посудинами, який відрізняється тим, що за допомогою системи регулювання електроприводу згаданої системи керування при знятті посудини з жорсткої нижньої основи забезпечують негативний напуск каната біля причіпного пристрою згідно з наступною умовою:
hнап1= -10m1g L01/A (1),
де А - агрегатна подовжня жорсткість каната,
m1 - маса навантаженої посудини, що піднімається,
L01 - довжина відповідного виска,
g - прискорення вільного падіння,
а при знятті порожньої посудини з жорсткої верхньої основи забезпечують негативний напуск каната біля причіпного пристрою згідно з наступною умовою:
hнап2= -10m2gL02/A (2),
де m2 - маса порожньої посудини, що опускається,
L02 - довжина відповідного виска,
причому при посадці навантаженої посудини на жорстку верхню і нижню основи забезпечують напуск каната біля причіпного пристрою згідно з умовами (1) і (2).
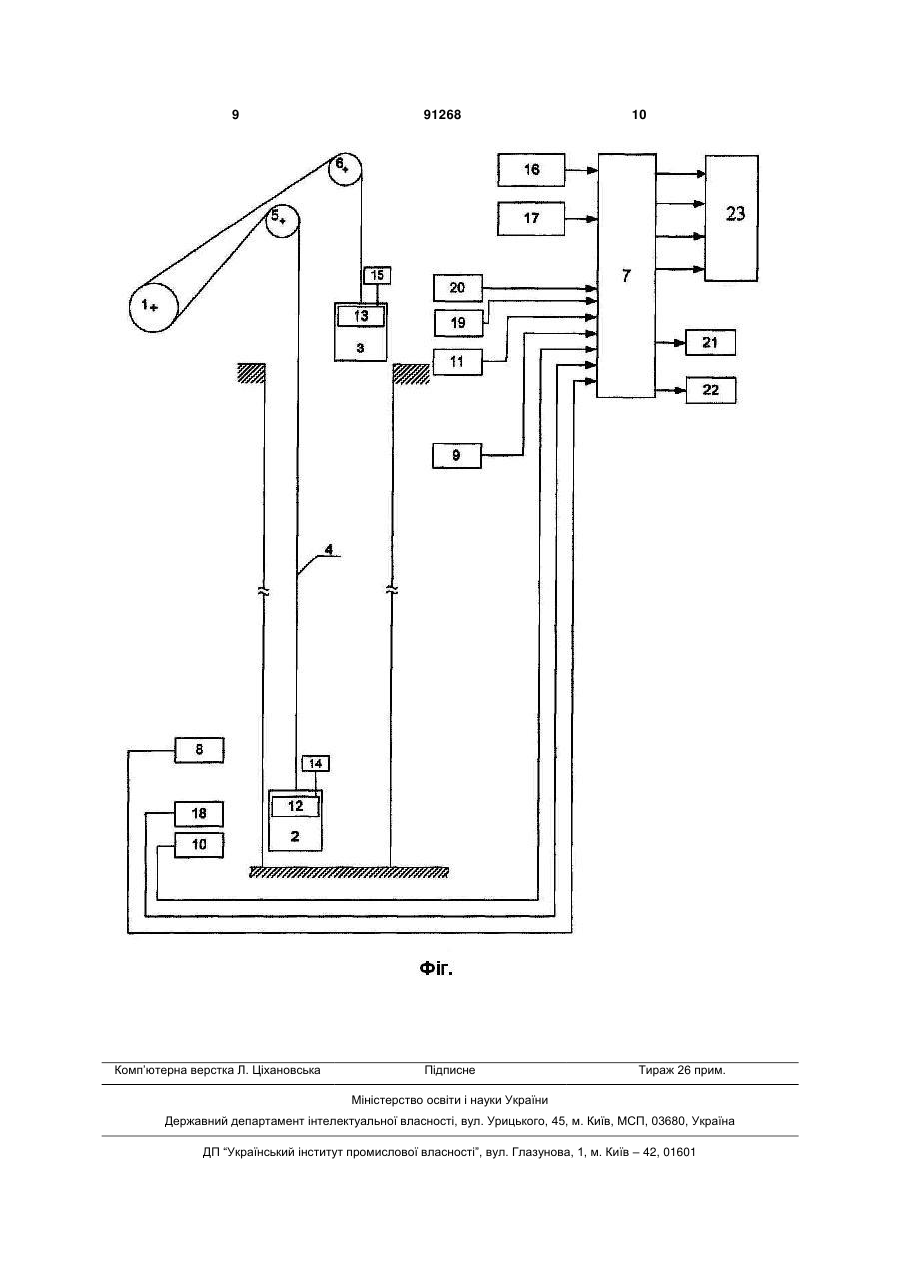
2. Пристрій керування посадкою - зняттям підйомної посудини з жорсткої основи для шахтної підйомної установки, де остання містить барабан з електроприводом, підйомні посудини, сполучені за допомогою причіпних пристроїв з протилежними кінцями тягового каната, що проходить через два направляючі шківи і охоплює барабан, при цьому згаданий пристрій містить мікроконтролер, перший і другий датчики початку уповільнення, виходи яких сполучені з першим та другим входами мікроконтролера, перший і другий датчики наявності кулаків, виходи яких сполучені з третім і четвертим входами мікроконтролера, схему індикації, інформаційний вхід якої сполучений з відповідним виходом мікроконтролера, клавіатуру, шина даних якої сполучена з відповідною шиною мікроконтролера, систему керування шахтною підйомною установкою, чотири входи якої сполучені з відповідними виходами мікроконтролера та до складу якої входить система регулювання електроприводу, який відрізняється тим, що в нього введені перша і друга передавальні радіостанції, встановлені на відповідних підйомних посудинах, перший і другий датчики натягнення каната, встановлені на канаті у першій та другій підйомних посудинах і сполучені відповідно з першою і другою передавальною радіостанціями, перша й друга приймальні радіостанції, виходи яких сполучені з відповідними аналоговими входами мікроконтролера, перший і другий датчики зупину, причому перший датчик зупину встановлений на нижньому рівні і підключений до п'ятого входу мікроконтролера, а другий датчик зупину - на верхньому рівні і підключений до шостого входу мікроконтролера, датчик верхнього рівня, вихід якого сполучений з сьомим входом мікроконтролера, причому останній здатний розраховувати величину негативного напуску каната біля причіпного пристрою при знятті посудини з жорсткої нижньої основи згідно з наступним виразом:
hнап1=-10m1g L01/A (1),
де А - агрегатна подовжня жорсткість каната,
m1 - маса навантаженої посудини, що піднімається,
L01 - довжина відповідного виска,
g - прискорення вільного падіння,
та величину негативного напуску каната біля причіпного пристрою при знятті порожньої посудини з жорсткої верхньої основи згідно з наступним виразом:
hнап2=-10m2gL02/A (2),
де m2 - маса порожньої посудини, що опускається,
L02 - довжина відповідного виска,
та передавати відповідні команди до системи регулювання електроприводу.
Текст
1. Спосіб керування посадкою - зняттям підйомної посудини з жорсткої основи, відповідно до якого за допомогою системи керування шахтної підйомної установки приводять у дію барабан шахтної підйомної установки та тяговий канат з приєднаними до нього причіпними пристроями посудинами, який відрізняється тим, що за допомогою системи регулювання електроприводу згаданої системи керування при знятті посудини з жорсткої нижньої основи забезпечують негативний напуск каната біля причіпного пристрою згідно з наступною умовою: hнап1= -10m1g L01/A, (1) де А - агрегатна подовжня жорсткість каната, m1 - маса навантаженої посудини, що піднімається, L01 - довжина відповідного виска, g - прискорення вільного падіння, а при знятті порожньої посудини з жорсткої верхньої основи забезпечують негативний напуск каната біля причіпного пристрою згідно з наступною умовою: hнап2= -10m2gL02/A, (2) де m2 - маса порожньої посудини, що опускається, L02 - довжина відповідного виска, причому при посадці навантаженої посудини на жорстку верхню і нижню основи забезпечують на 2 (19) 1 3 91268 4 L01 - довжина відповідного виска, g - прискорення вільного падіння, та величину негативного напуску каната біля причіпного пристрою при знятті порожньої посудини з жорсткої верхньої основи згідно з наступним виразом: hнап2=-10m2gL02/A, (2) де m2 - маса порожньої посудини, що опускається, L02 - довжина відповідного виска, та передавати відповідні команди до системи регулювання електроприводу. Взаємозв'язана група винаходів відноситься до шахтних і копальневих підйомних установок і може бути використана у системах управління і захисту шахтних підйомних установок. Відомий спосіб захисту шахтної підйомної установки від набігання завантаженої підйомної посудини на тяговий канат і пристрій для його здійснення (захист Н.Б. Огнева) [1], який включає вимірювання уповільнення завантаженої підйомної посудини шляхом диференціювання величини швидкості його переміщення, порівняння допустимого уповільнення із заданим і, по їх різниці, зміну гальмівної дії запобіжного гальмування. До недоліку такого способу слід віднести наявність додаткових динамічних навантажень у системі "підйомна посудина - канат - машина" у перехідних режимах при відпрацюванні системою регулювання різниці заданої і реальної швидкостей руху посудини. Відомий також, вибираний як прототип, спосіб роботи резонансної підйомної установки [2], відповідно до якого система регулювання електроприводу приводить у дію підйомну машину, головні канати, канати що врівноважують та інші рухомі елементи. Спосіб забезпечує резонансний підйом, при якому електропривод працює у м'якому режимі, що знижує динамічне навантаження на вантажонесучі елементи системи. До недоліку способу слід віднести наявність "підстрибування" кліті при знятті її з кулаків, що приводить до значних динамічних навантажень на канат і підйомну посудину. Відомий пристрій управління, контролю руху і технологічних захистів шахтної підйомної установки [3], включає перший і другий кругові фотоелектричні датчики положення посудин, блок управління гальмуванням, блок електроприводу шахтної підйомної установки і блок системи управління підйомною установкою. Пристрій забезпечує захист від набігу підйомної посудини на канат і забезпечує м'якший режим роботи підйомного двигуна. Проте, пристрій не враховує поточну швидкість і реальне місцезнаходження підйомної посудини, що може привести до жорсткої посадки посудини на кулаки. Найближчим по технічній суті до того, що заявляється є пристрій для управління переміщенням підйомної посудини в шахтному стволі [4], до складу якого входить барабан шахтної підйомної установки, перша і друга підйомні посудини, спо лучені з протилежними кінцями тягового канату, що проходить через два направляючі шківи і охоплює барабан, мікроконтролер, перший і другий датчики початку уповільнення, виходи яких сполучені з відповідними входами мікроконтролера, перший і другий датчики наявності кулаків, виходи яких сполучені з третім і четвертим входами мікроконтролера, схема індикації, інформаційний вхід якої сполучений з відповідним виходом мікроконтролера, клавіатура, шина даних якої сполучена з відповідною шиною мікроконтролера, система управління підйомною установкою, чотири входи якої сполучені з відповідними виходами мікроконтролера. Пристрій забезпечує м'яку посадку на жорстку основу (кулаки). Проте, при знятті посудини з кулаків верхньої або нижньої основи, виникає короткочасне збільшення навантаження на канат, що при багатократному повторенні у кожному циклі підйому приводить до скорочення термінів служби канатів, підвісних пристроїв і посудин, знижує безпеку роботи підйомної установки (ПУ). У основу першого з групи винаходу поставлена задача удосконалення способу при знятті підйомної посудини з жорсткої нижньої основи шляхом забезпечення негативного напуску каната у причіпного пристрою, що задовольняє умові: hнап1=-10m1gL01/A, (1) де А - агрегатна подовжня жорсткість каната, m1 маса навантаженої посудини, що піднімається, L01 - довжина схилу, g - прискорення вільного падіння, а при знятті порожньої посудини з жорсткої верхньої основи негативний напуск каната у причіпного пристрою задовольняє наступній умові: hнап2=-10m2gL02/A, (2) де m2 - маса порожньої кліті, що опускається, L02 довжина схилу, що дозволяє понизити динамічне навантаження на канат, підвісні пристрої і кліть. При посадці навантаженої посудини на жорстку верхню і нижню основи напуск каната у причіпного пристрою також задовольняє відповідним співвідношенням (1) і (2), що дозволяє понизити або усунути напуск каната у причіпного пристрою. У основу другого з групи винаходів поставлена задача зниження динамічних навантажень на канат, підйомну посудину при посадці і знятті посудини з жорсткої основи. Це дозволить підвищити рівень безпеки роботи підйомної установки, її надійність і продуктивність за рахунок збільшення терміну служби каната і підвісної посудини. Перша поставлена задача розв'язується так, що в способі посадки-зняття підйомної посудини з 5 жорсткої основи, відповідно до якого система регулювання електроприводу приводить у дію підйомну машину, головні канати, канати що врівноважують, у тому числі підвісні посудини, відповідно до винаходу, система регулювання електроприводу при знятті посудини з жорсткої нижньої основи забезпечує негативний напуск канату у причіпного пристрою, задовольняюче наступній умові (1), а при знятті порожньої посудини з жорсткої верхньої основи негативний напуск каната у причіпного пристрою задовольняє умові (2), при посадці навантаженої посудини на жорстку верхню і нижню основу напуск канату у причіпного пристрою відповідає співвідношенням (1) і (2). Друга поставлена задача розв'язується так, що у відомому пристрої управління посадкою і зняттям підйомної посудини з жорсткої основи, до складу якого входить барабан шахтної підйомної установки, перша і друга підйомні посудини, сполучені з протилежними кінцями тягового канату, що проходить через два направляючі шківи і охоплює барабан, мікроконтролер, перший і другий датчики початку уповільнення, виходи яких сполучені з відповідними входами мікроконтролера, перший і другий датчики наявності кулаків, виходи яких сполучені з третім і четвертим входами мікроконтролера, схема індикації, інформаційний вхід якої сполучений з відповідним виходом мікроконтролера, клавіатура, шина даних якої сполучена з відповідною шиною мікроконтролера, система управління підйомною установкою, чотири входи якої сполучені з відповідними виходами мікроконтролера, відповідно до винаходу введені перша і друга передаючі радіостанції, встановлені на відповідних підйомних посудинах, перший і другий датчики натягнення канату, встановлені на канаті у першої та другої підйомної посудини і сполучені відповідно з першою і другою передаючою радіостанціями, перша та друга приймальні радіостанції, виходи яких сполучені з відповідними аналоговими входами мікроконтролера, перший і другий датчики зупину, причому перший встановлений на нижньому горизонті і підключений до п'ятого входу мікроконтролера, а другий - на верхньому горизонті і сполучений з шостим входом мікроконтролера, датчик верхнього рівня, вихід якого сполучений з сьомим входом мікроконтролера. Введення у пристрій датчиків натягнення каната, приймальних і передаючих радіостанцій вигідно відрізняє пропонований пристрій від прототипу, оскільки здійснюється безперервне вимірювання натягнення канату, а за допомогою мікроконтролера обчислюється напуск канату. Таке рішення дозволяє захистити підйомну установку від напуску канату або його розриву унаслідок зависання підйомної посудини у стволі. Крім того, введення датчиків зупину забезпечує контроль перевищення положення днища кліті над кулаками, а обмеження величини напуску канату при посадці і знятті підвісної посудини з основи забезпечує зниження динамічних навантажень, що дозволяє понизити вірогідність обриву канату або руйнування підвісного пристрою і рами кліті. Сутьвинаходу пояснюється кресленням, де зображена структурна схема пристрою управління 91268 6 посадкою і зняттям підйомної посудини з основи. Спосіб, що заявляється, реалізується таким чином. Системою регулювання електроприводу приводять в дію підйомну машину і встановлюють підйомну посудину на кулаки приймального майданчика. Вимірюють величину натягнення канату і обчислюють значення напуску канату. Задають величину напуску каната у причіпного пристрою при знятті посудини з жорсткої нижньої основи співвідношенням: hнап1=-10m1gL01/A (1) де А - агрегатна подовжня жорсткість каната, m1 маса навантаженої посудини, що піднімається, L01 - довжина схилу, g - прискорення вільного падіння, а співвідношенням: hнап2=-10m2gL02/A (2) де m2 - маса порожньої кліті, що опускається, L02 довжина схилу задають величину напуску канату при посадці навантаженої посудини на жорстку верхню основу. Співвідношеннями (1) і (2) задають величину напуску канату при посадці навантаженої посудини відповідно на жорстку верхню та нижню основи. Потім приводять в дію підйомну машину, головні канати, канати що врівноважують та інші рухомі елементи. В процесі роботи підйомної машини контролюють величину напуску канату, яка не повинна бути більшою або рівною величині напуску канату, виміряної при установці підйомної посудини на кулаки приймального майданчика. Виконують посадку-зняття посудини з жорсткої основи відповідно до умов (1) і (2). Найбільш доцільно застосувати для цього описаний нижче пристрій. Пристрій, наведений на Фіг., містить барабан шахтної підйомної установки 1, підйомні посудини 2 і 3, тяговий канат 4, направляючі шківи 5 і 6, мікроконтролер 7, датчики початку уповільнення 8 і 9, датчики наявності кулаків 10 і 11, передаючі радіостанції 12 і 13, датчики натягнення канату 14 і 15, приймальні радіостанції 16 і 17, датчики зупину 18 і 19, датчик верхнього рівня 20, клавіатуру 21, схему індикації 22, систему управління підйомною установкою 23. Пристрій працює таким чином. У початковому стані підйомну посудину 2 встановлюють на кулаки нижнього приймального майданчика, а підйомну посудину 3 - на кулаки верхнього приймального майданчика і вимірюють датчиками 14 і 15 величину натягнення канату. Сигнали з виходів датчиків 14 і 15 поступають через відповідні передаючі радіостанції 12 і 13 на приймальні радіостанції 16 і 17. З виходів приймальних радіостанцій 16 і 17 аналогові значення величини натягнення канату 4 надходять до мікроконтролера 7, який обчислює чисельне значення величини напуску канату, запам'ятовує і виводить на схему індикації 22. Далі, за допомогою клавіатури 21, вводяться значення величини напуску канату 4 у причіпного пристрою при знятті навантаженої посудини 2 з нижньої основи і при знятті порожньої посудини 3 з верхньої основи. Крім того, за допомогою клавіатури 21 вводяться значення величини напуску канату 4 при посадці навантаженої посудини 2 на верхню 7 жорстку основу і при посадці порожньої посудини 3 на нижню жорстку основу. Після установки вказаних початкових даних пристрій підготовлений до роботи. Припустимо, що виконується спуск підйомної посудини 2 на нижній приймальний майданчик. При проходженні підйомною посудиною 2 датчики початку уповільнення 8, мікроконтролер 7 формує команду на зниження швидкості руху посудини, яка поступає на перший вхід системи управління підйомною установкою 23. Потім, під час появи сигналу від датчика зупину 18 і за наявності відповідного сигналу від датчика натягнення каната 14, мікроконтролер 7 формує команду "СТОП", яка поступає в систему управління підйомною установкою 23 на другий вхід. При такій установці підйомної посудини 2 кулаки виконують страхуючу роль, оскільки днище підйомної посудини 2 ледве торкається кулаків, і посудина утримується в такому положенні гальмом (або включеним електродвигуном). Аналогічно здійснюється посадка підйомної посудини 3 на верхню жорстку основу (кулаки). При знятті підйомної посудини 3 з кулаків, система управління підйомною установкою 23 формує відповідну команду, згідно з якою підйомна посудина 3 підіймається на висоту, на якій спрацьовує датчик верхнього рівня 20, щоб прибрати кулаки, після чого мікроконтролер 7 формує команду "СТОП" і підйомна установка зупиняється. Під час появи сигналу "Кулаки прибрані" від датчика наявності кулаків 11, мікроконтролер 7 формує відповідний сигнал, який поступає на третій вхід системи управління підйомною установкою 23. Остання включається і виконує операцію спуску підйомної посудини 3 вниз. Аналогічно здійснюється процес зняття підйомної посудини 2 з жорсткої основи, за винятком того, що при цьому підйомна установка (машина) без зупинки включається в передбачений технологічним циклом процес підйому. Пристрій, за допомогою датчиків натягнення 91268 8 каната 14 і 15, здійснює безперервний контроль напуску канату 4. При збільшенні напуску канату 4 більше максимально допустимого значення або зменшенні більше допустимого значення мікроконтролер 7 формує сигнал аварійної зупинки підйомної машини, який поступає на четвертий вхід системи управління підйомною установкою 23. Таке рішення дозволяє захистити підйомну установку від напуску канату або його розриву унаслідок зависання підйомної посудини в стволі. Пропонований пристрій управління посадкою і зняттям підйомної посудини з жорсткої основи дозволяє понизити динамічне навантаження на канат та підвісні посудини і тим самим збільшити їх довговічність, що сприяє підвищенню безпеки експлуатації підйомної установки. В даний час в інституті розроблена конструкторська документація і виготовлений експериментальний зразок пристрою. Джерела інформації: 1. Патент RU №94044769, МПК7 В66В5/12, 1996, Способ защиты шахтной подъемной установки от набегания груженного подъемного сосуда на тяговые канаты и устройство для его осуществления (Защита Н.Г. Огнева), Огнев Н.Г., Чудогашев Е.В., Дмитриев Е.А., заяв. 20.12.1994, опубл. 20.11.1996. 2. Патент UA № 74621, МПК7 В66В1/06, 2006, Спосіб робота резонансної шахтної підйомної установки, Грядущий Б.А. та інші, заявл. 21.08.2003, опубл. 16.01.2003, бюл. №1, 2006. 7 3. Патент RU №2005140857, МПК В66В5/00, 2007, Устройство управления, контроля движения и технологических защит шахтной подъемной установки, Островлянчик В.Ю., Стексов A.M., Кубарев В.А., заяв. 26.12.2005, опубл. 10.07.2007 4. Патент UA №78348, МПК7 В66В1/28, 2007, Пристрій для керування переміщенням піднімальної посудини в шахтному стволі, Грядущий Б.А. та інші, заявл. 18.02.2005, опубл. 15.03.2007, бюл. №3, 2007. 9 Комп’ютерна верстка Л. Ціхановська 91268 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for control of landing - removal of lifting vessel from rigid bed
Автори англійськоюChekhlatyi Mykola Oleksandrovych, Dvornykov Volodymyr Ivanovych
Назва патенту російськоюСпособ управления посадкой - снятием подъемного сосуда с жесткого основания и устройство для его осуществления
Автори російськоюЧехлатый Николай Александрович, Дворников Владимир Иванович
МПК / Мітки
Мітки: жорсткої, зняттям, посудини, керування, спосіб, здійснення, пристрій, посадкою, підйомної, основі
Код посилання
<a href="https://ua.patents.su/5-91268-sposib-keruvannya-posadkoyu-znyattyam-pidjjomno-posudini-z-zhorstko-osnovi-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування посадкою – зняттям підйомної посудини з жорсткої основи та пристрій для його здійснення</a>
Пристрій для керування переміщенням підйомної посудини в шахтному стволі
Номер патенту: 81833
Опубліковано: 11.02.2008
Автори: Пристром Володимир Адольфович, Чехлатий Андрій Миколайович, Дворников Володимир Іванович, Грядущий Борис Абрамович, Бежок Віктор Романович, Дворников Михайло Володимирович
МПК: G01G 13/00, B03B 13/00
Мітки: переміщенням, керування, пристрій, шахтному, підйомної, посудини, стволі
Формула / Реферат:
Пристрій для керування переміщенням підйомної посудини в шахтному стволі, що містить блок контролю та керування навантажувального пункту, до складу якого входять привід обвалення гірської маси в дозатор, привід живильника та конвеєра, привід клапана герметизації, привід секторного затвора, привід гасника швидкості гірської маси, датчик наявності гірської маси в бункері, два датчики приходу транспортної посудини під завантаження, датчик...
Пристрій для контролю місця розташування підйомної посудини
Номер патенту: 82162
Опубліковано: 11.03.2008
Автори: Мялковський Валентин Йосипович, Демченко Микола Петрович, Демченко Дмитро Миколайович, Чехлатий Микола Олександрович, Чехлатий Андрій Миколайович
МПК: B66B 5/00, B66B 3/00, B66B 1/00
Мітки: місця, розташування, підйомної, контролю, посудини, пристрій
Формула / Реферат:
Пристрій для контролю місця розташування підйомної посудини, що містить блок прийому інформації і блок передачі інформації, до складу якого входять два датчики зближення, розташовані на вертикальній стінці підйомної посудини, який відрізняється тим, що в блок прийому інформації введені два регістри, комутатор, виходи якого підключені до відповідних входів керування першого і другого цифрових індикаторів, інформаційні входи першого і другого...
Напрямний пристрій шахтної підйомної посудини
Номер патенту: 40180
Опубліковано: 25.03.2009
Автори: Труш Кирило Анатольович, Соломенцев Костянтин Анатольович, Соломенцев Анатолій Іванович, Труш Іван Омелянович
Мітки: посудини, напрямний, пристрій, підйомної, шахтної
Формула / Реферат:
Напрямний пристрій шахтної підйомної посудини, що містить станину, на якій встановлені пересувні роликоопори, який відрізняється тим, що корпус кожної роликоопори містить плиту з напрямними канавками, в які заходять ребра станини, ребра мають клиноподібні потовщення, що взаємодіють зі скосами притискної планки, при цьому вісь роликоопори з обох торців має внутрішню різьбу під болти і лиски під ключ, а головка болта і шайби виконані у вигляді...
Пристрій керування захисним гальмом підйомної машини
Номер патенту: 37464
Опубліковано: 15.05.2001
Автори: Самуся Сергій Ілліч, Куваєв Сергій Миколайович, Самуся Володимир Ілліч, Коміссаров Юрій Олексійович
МПК: B66B 5/16
Мітки: пристрій, захисним, підйомної, гальмом, машини, керування
Формула / Реферат:
Пристрій керування захисним гальмом підйомної машини, що має регулююче пристосування, виконане у вигляді циліндра з поршнем, що утворюють клапанний блок вихлопу на одному кінці, а на іншому кінці - камеру керування, що з'єднана через регульований дросель із вихідним патрубком електропневматичного клапана захисного гальмування, який відрізняється тим, що має нормально закритий пневматичний та керований електропневматичний клапани, відповідно...
Пристрій для керування переміщенням піднімальної посудини в шахтному стволі
Номер патенту: 78348
Опубліковано: 15.03.2007
Автори: Дворников Володимир Іванович, Чехлатий Микола Олександрович, Чехлатий Андрій Миколайович, Мялковський Валентин Йосипович, Грядущий Борис Абрамович
МПК: B66B 1/28
Мітки: посудини, піднімальної, шахтному, керування, переміщенням, стволі, пристрій
Формула / Реферат:
Пристрій для керування переміщенням піднімальної посудини в шахтному стволі, до складу якого входять датчик навантаження, датчик шляхових імпульсів і регулятор тиску механізму гальма, який відрізняється тим, що в нього введені мікропроцесор, дешифратор, адресні входи якого з'єднані з адресними виходами мікропроцесора, перший інформаційний вихід останнього з'єднаний з регулятором тиску механізму гальма, другий - із блоком керування...