Механізм автоматичного регулювання глибини ходу робочих органів сільськогосподарського знаряддя
Номер патенту: 97997
Опубліковано: 10.04.2015

Формула / Реферат
Механізм автоматичного регулювання глибини ходу робочих органів сільськогосподарського знаряддя, що містить робочий орган, стійку, пружний елемент стійки, який відрізняється тим, що стійка виконана у вигляді телескопічного механізму, в якому кріпиться пружний елемент з регулятором.
Текст
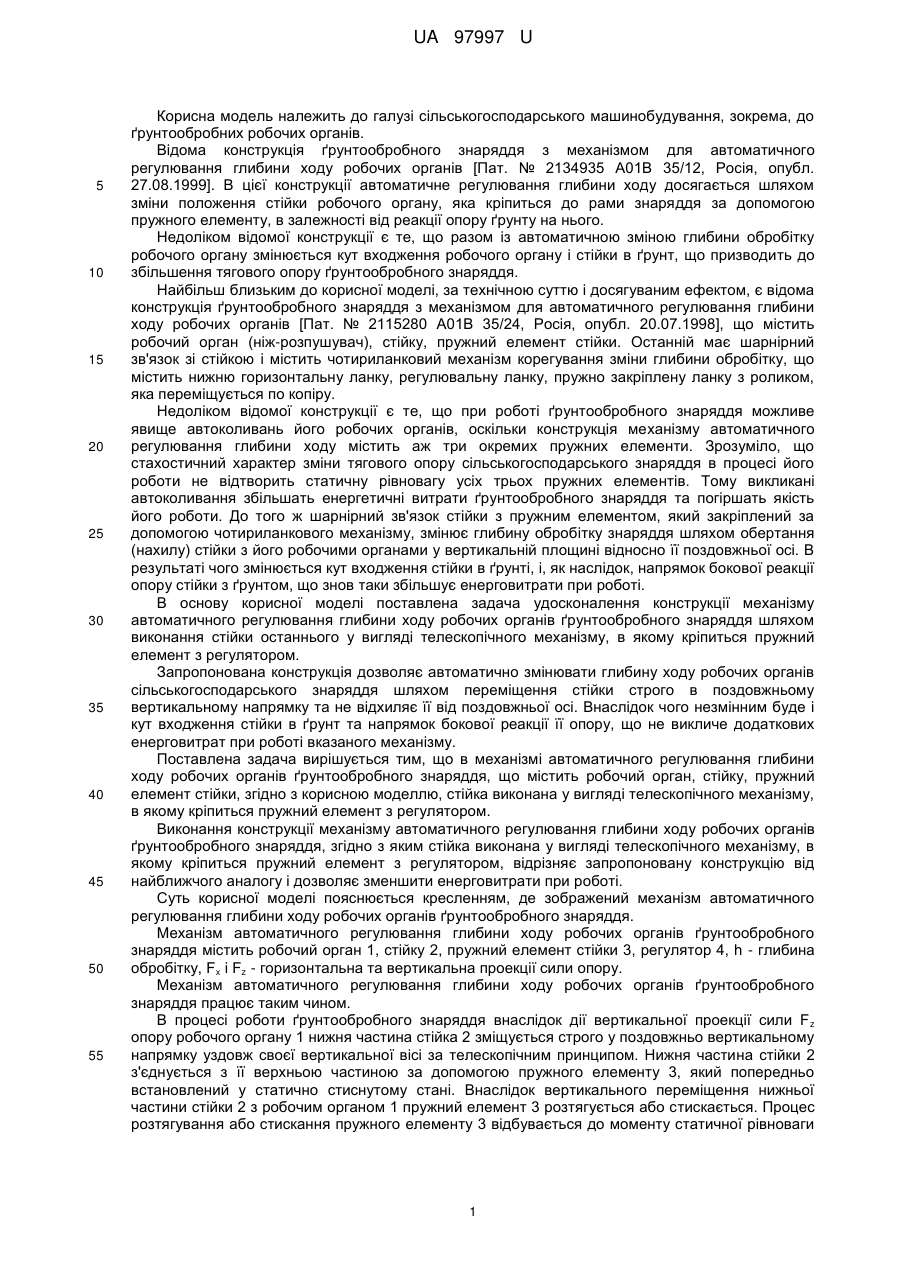
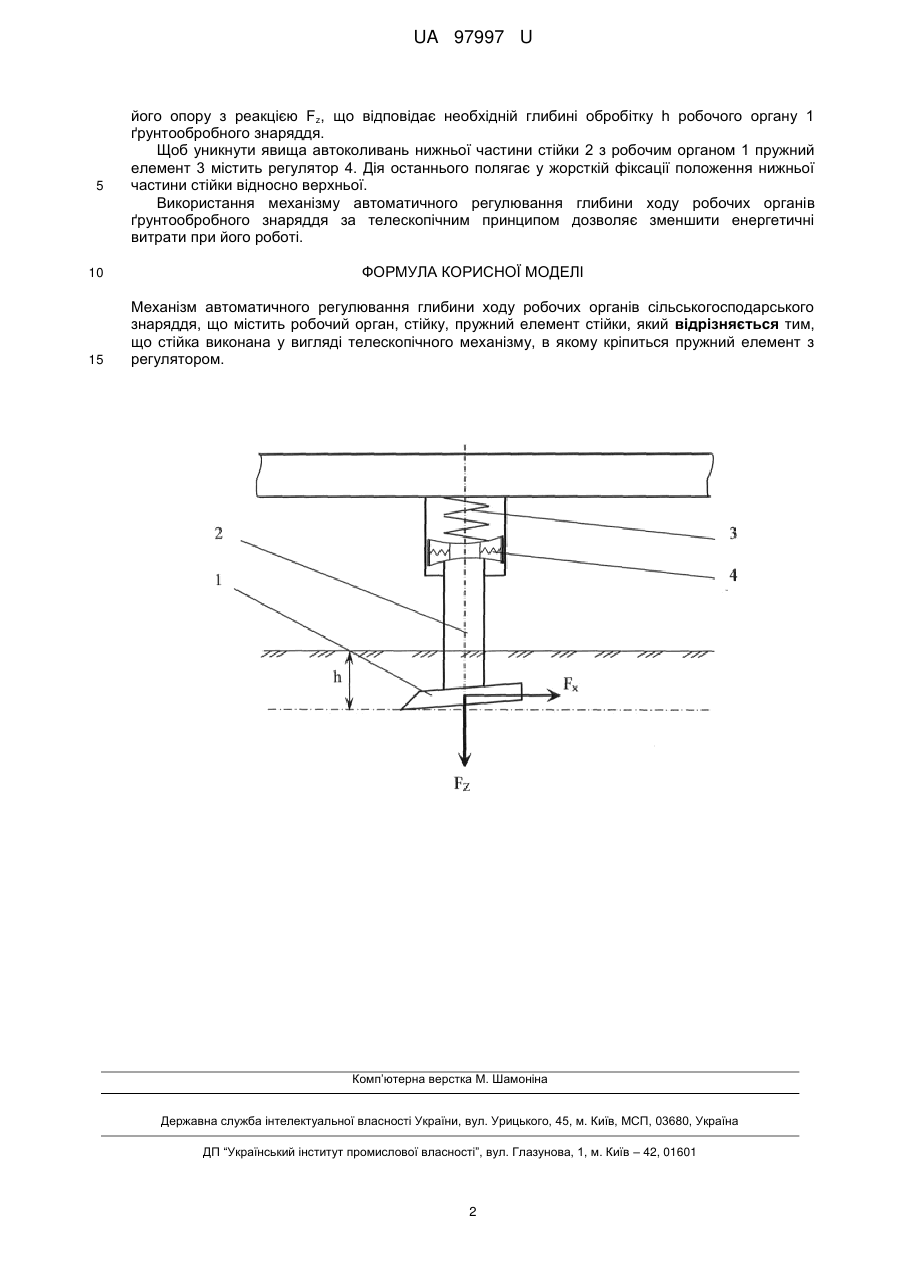
Реферат: Механізм автоматичного регулювання глибини ходу робочих органів сільськогосподарського знаряддя містить робочий орган, стійку, пружний елемент стійки. Стійка виконана у вигляді телескопічного механізму, в якому кріпиться пружний елемент з регулятором. UA 97997 U (12) UA 97997 U UA 97997 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі сільськогосподарського машинобудування, зокрема, до ґрунтообробних робочих органів. Відома конструкція ґрунтообробного знаряддя з механізмом для автоматичного регулювання глибини ходу робочих органів [Пат. № 2134935 А01В 35/12, Росія, опубл. 27.08.1999]. В цієї конструкції автоматичне регулювання глибини ходу досягається шляхом зміни положення стійки робочого органу, яка кріпиться до рами знаряддя за допомогою пружного елементу, в залежності від реакції опору ґрунту на нього. Недоліком відомої конструкції є те, що разом із автоматичною зміною глибини обробітку робочого органу змінюється кут входження робочого органу і стійки в ґрунт, що призводить до збільшення тягового опору ґрунтообробного знаряддя. Найбільш близьким до корисної моделі, за технічною суттю і досягуваним ефектом, є відома конструкція ґрунтообробного знаряддя з механізмом для автоматичного регулювання глибини ходу робочих органів [Пат. № 2115280 А01В 35/24, Росія, опубл. 20.07.1998], що містить робочий орган (ніж-розпушувач), стійку, пружний елемент стійки. Останній має шарнірний зв'язок зі стійкою і містить чотириланковий механізм корегування зміни глибини обробітку, що містить нижню горизонтальну ланку, регулювальну ланку, пружно закріплену ланку з роликом, яка переміщується по копіру. Недоліком відомої конструкції є те, що при роботі ґрунтообробного знаряддя можливе явище автоколивань його робочих органів, оскільки конструкція механізму автоматичного регулювання глибини ходу містить аж три окремих пружних елементи. Зрозуміло, що стахостичний характер зміни тягового опору сільськогосподарського знаряддя в процесі його роботи не відтворить статичну рівновагу усіх трьох пружних елементів. Тому викликані автоколивання збільшать енергетичні витрати ґрунтообробного знаряддя та погіршать якість його роботи. До того ж шарнірний зв'язок стійки з пружним елементом, який закріплений за допомогою чотириланкового механізму, змінює глибину обробітку знаряддя шляхом обертання (нахилу) стійки з його робочими органами у вертикальній площині відносно її поздовжньої осі. В результаті чого змінюється кут входження стійки в ґрунті, і, як наслідок, напрямок бокової реакції опору стійки з ґрунтом, що знов таки збільшує енерговитрати при роботі. В основу корисної моделі поставлена задача удосконалення конструкції механізму автоматичного регулювання глибини ходу робочих органів ґрунтообробного знаряддя шляхом виконання стійки останнього у вигляді телескопічного механізму, в якому кріпиться пружний елемент з регулятором. Запропонована конструкція дозволяє автоматично змінювати глибину ходу робочих органів сільськогосподарського знаряддя шляхом переміщення стійки строго в поздовжньому вертикальному напрямку та не відхиляє її від поздовжньої осі. Внаслідок чого незмінним буде і кут входження стійки в ґрунт та напрямок бокової реакції її опору, що не викличе додаткових енерговитрат при роботі вказаного механізму. Поставлена задача вирішується тим, що в механізмі автоматичного регулювання глибини ходу робочих органів ґрунтообробного знаряддя, що містить робочий орган, стійку, пружний елемент стійки, згідно з корисною моделлю, стійка виконана у вигляді телескопічного механізму, в якому кріпиться пружний елемент з регулятором. Виконання конструкції механізму автоматичного регулювання глибини ходу робочих органів ґрунтообробного знаряддя, згідно з яким стійка виконана у вигляді телескопічного механізму, в якому кріпиться пружний елемент з регулятором, відрізняє запропоновану конструкцію від найближчого аналогу і дозволяє зменшити енерговитрати при роботі. Суть корисної моделі пояснюється кресленням, де зображений механізм автоматичного регулювання глибини ходу робочих органів ґрунтообробного знаряддя. Механізм автоматичного регулювання глибини ходу робочих органів ґрунтообробного знаряддя містить робочий орган 1, стійку 2, пружний елемент стійки 3, регулятор 4, h - глибина обробітку, Fx і Fz - горизонтальна та вертикальна проекції сили опору. Механізм автоматичного регулювання глибини ходу робочих органів ґрунтообробного знаряддя працює таким чином. В процесі роботи ґрунтообробного знаряддя внаслідок дії вертикальної проекції сили F z опору робочого органу 1 нижня частина стійка 2 зміщується строго у поздовжньо вертикальному напрямку уздовж своєї вертикальної вісі за телескопічним принципом. Нижня частина стійки 2 з'єднується з її верхньою частиною за допомогою пружного елементу 3, який попередньо встановлений у статично стиснутому стані. Внаслідок вертикального переміщення нижньої частини стійки 2 з робочим органом 1 пружний елемент 3 розтягується або стискається. Процес розтягування або стискання пружного елементу 3 відбувається до моменту статичної рівноваги 1 UA 97997 U 5 його опору з реакцією Fz, що відповідає необхідній глибині обробітку h робочого органу 1 ґрунтообробного знаряддя. Щоб уникнути явища автоколивань нижньої частини стійки 2 з робочим органом 1 пружний елемент 3 містить регулятор 4. Дія останнього полягає у жорсткій фіксації положення нижньої частини стійки відносно верхньої. Використання механізму автоматичного регулювання глибини ходу робочих органів ґрунтообробного знаряддя за телескопічним принципом дозволяє зменшити енергетичні витрати при його роботі. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 Механізм автоматичного регулювання глибини ходу робочих органів сільськогосподарського знаряддя, що містить робочий орган, стійку, пружний елемент стійки, який відрізняється тим, що стійка виконана у вигляді телескопічного механізму, в якому кріпиться пружний елемент з регулятором. Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюKuvachov Volodymyr Petrovych, Mitkov Vasyl Borysovych
Автори російськоюКувачов Владимир Петрович, Митков Василий Борисович
МПК / Мітки
МПК: A01B 63/111, A01B 35/24
Мітки: робочих, механізм, сільськогосподарського, глибини, знаряддя, автоматичного, органів, регулювання, ходу
Код посилання
<a href="https://ua.patents.su/4-97997-mekhanizm-avtomatichnogo-regulyuvannya-glibini-khodu-robochikh-organiv-silskogospodarskogo-znaryaddya.html" target="_blank" rel="follow" title="База патентів України">Механізм автоматичного регулювання глибини ходу робочих органів сільськогосподарського знаряддя</a>
Система регулювання підйому робочих інструментів сільськогосподарського знаряддя
Номер патенту: 57598
Опубліковано: 16.06.2003
Автори: Нунан Джеймс Томас, Пейн Девід Алан, Паркер Пол Девід
МПК: A01B 63/10, A01B 63/00
Мітки: сільськогосподарського, знаряддя, підйому, регулювання, система, робочих, інструментів
Формула / Реферат:
1. Система регулювання підйому робочих інструментів сільськогосподарського знаряддя, що включає поперечну раму для кріплення інструментів з передньою і задньою частинами, пристосованого для руху уперед по поверхні землі за допомогою буксирувального транспорту і забезпеченому множиною поперечно розміщених підіймальних вузлів для підняття і опускання рами відносно землі, в якому система регулювання підйому містить гідравлічні циліндри, з'єднані...
Механізм навіски робочих органів посівних машин
Номер патенту: 38884
Опубліковано: 15.05.2001
Автори: Пастухов Валерій Іванович, Фесенко Григорій Васильович
МПК: A01C 7/20
Мітки: машин, органів, механізм, навіски, робочих, посівних
Формула / Реферат:
(21) 2000116396 Дата прийняття(54) (57) рішення 23 квітня 2001 р.1. Механізм навіски робочих органів посівних машин, який включає радіальний поводок, шарнірно з'єднаний з рамою машини та переднім робочим органом,...
Механізм приводу робочих органів сільськогосподарських машин
Номер патенту: 77806
Опубліковано: 15.01.2007
Автори: Павлик Володимир Іванович, Пейчев Савва Васильович, Яблуновський Василь Сергійович, Кумпан Віктор Карпович
МПК: A01B 71/00, A01D 34/00
Мітки: машин, органів, робочих, механізм, сільськогосподарських, приводу
Формула / Реферат:
Механізм приводу робочих органів сільськогосподарських машин, який містить ексцентрик та вал, з’єднані між собою хомутом, які мають в місцях з’єднання лиски, хомут стягує вал і ексцентрик, а внутрішня поверхня хомута у поперечному перерізі виконана у вигляді паза, який відрізняється тим, що радіуси вала, ексцентрика та поверхонь, якими закінчується паз, рівні між собою та є рівними по значенню половині розміру ширини паза, а розміри
Робочий орган ґрунтообробного знаряддя
Номер патенту: 40679
Опубліковано: 27.04.2009
Автори: Ольховський Микола Федорович, Заполін Володимир Михайлович, Головко Геннадій Олександрович, Ящук Анатолій Іванович, Яровий Григорій Іванович
МПК: A01B 39/00
Мітки: робочий, орган, ґрунтообробного, знаряддя
Формула / Реферат:
Робочий орган ґрунтообробного знаряддя, який включає стійку і лапу, який відрізняється тим, що з метою підвищення розпушувальної здатності, протистояння налипанню ґрунту і забиванню бур'янами на стійці стрілчастої лапи наварено пластину, яка за кривизною співпадає із кривизною стійки і за шириною по фронту перевищує останню, і є продовженням хвостовика лапи з можливістю регулювання глибини обробітку ґрунту.
Спосіб регулювання режимів функціонування робочих органів зернозбирального комбайна
Номер патенту: 69913
Опубліковано: 25.05.2012
Автори: Войтюк Дмитро Григорович, Аніскевич Леонід Володимирович, Смолінський Станіслав Вікторович
МПК: A01D 41/12
Мітки: регулювання, органів, функціонування, комбайна, зернозбирального, спосіб, режимів, робочих
Формула / Реферат:
Спосіб регулювання режимів функціонування робочих органів зернозбирального комбайна, що містить систему контролю і регулювання технологічних режимів роботи, обладнання супутникової глобальної системи позиціонування, бортовий комп'ютер, який відрізняється тим, що в бортовий комп'ютер додатково перед збиранням завантажується електронна картограма-завдання на збирання, яку отримують на підставі обробітку даних з моніторингу процесів формування...
Попередній патент: Стереоселективний метод синтезу фосфорильованих алкенів
Наступний патент: Пристрій для біопсії
Випадковий патент: Спосіб корекції метаболічних порушень в осіб із ко-інфекцією вірусу імунодефіциту людини та хронічного гепатиту с