Механізм перетворення руху
Номер патенту: 98245
Опубліковано: 25.04.2012
Автори: Соколенко Анатолій Іванович, Піддубний Володимир Антонович
Формула / Реферат
Механізм перетворення руху, що складається зі стояка, кривошипа, шатуна і повзуна, який відрізняється тим, що механізм устатковано другим кривошипом і другим шатуном, при цьому функцію кривошипів виконують зубчасті колеса, які синхронізовані в русі за рахунок зачеплення і з'єднані двома симетричними шатунами з повзуном, який переміщується в стояку.
Текст
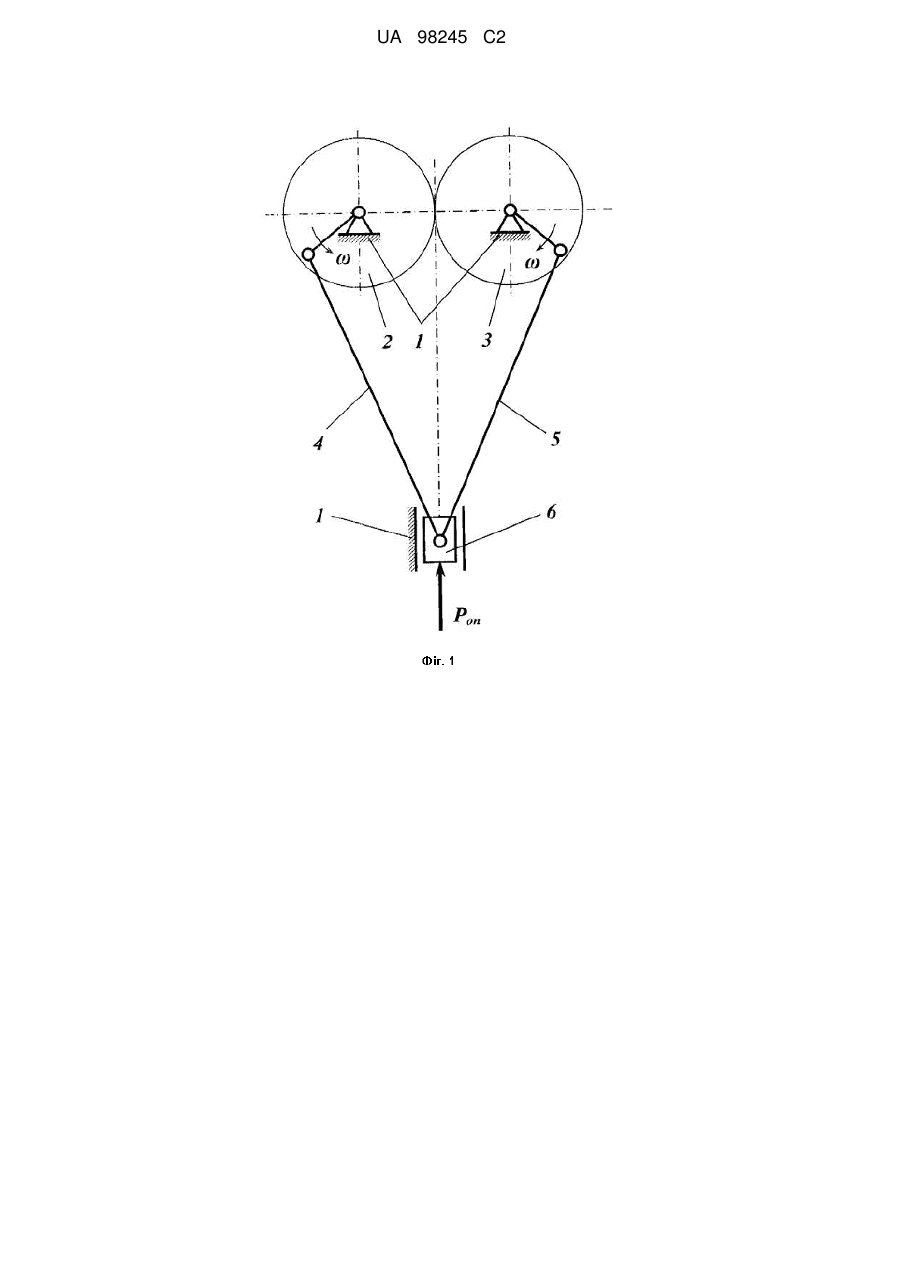
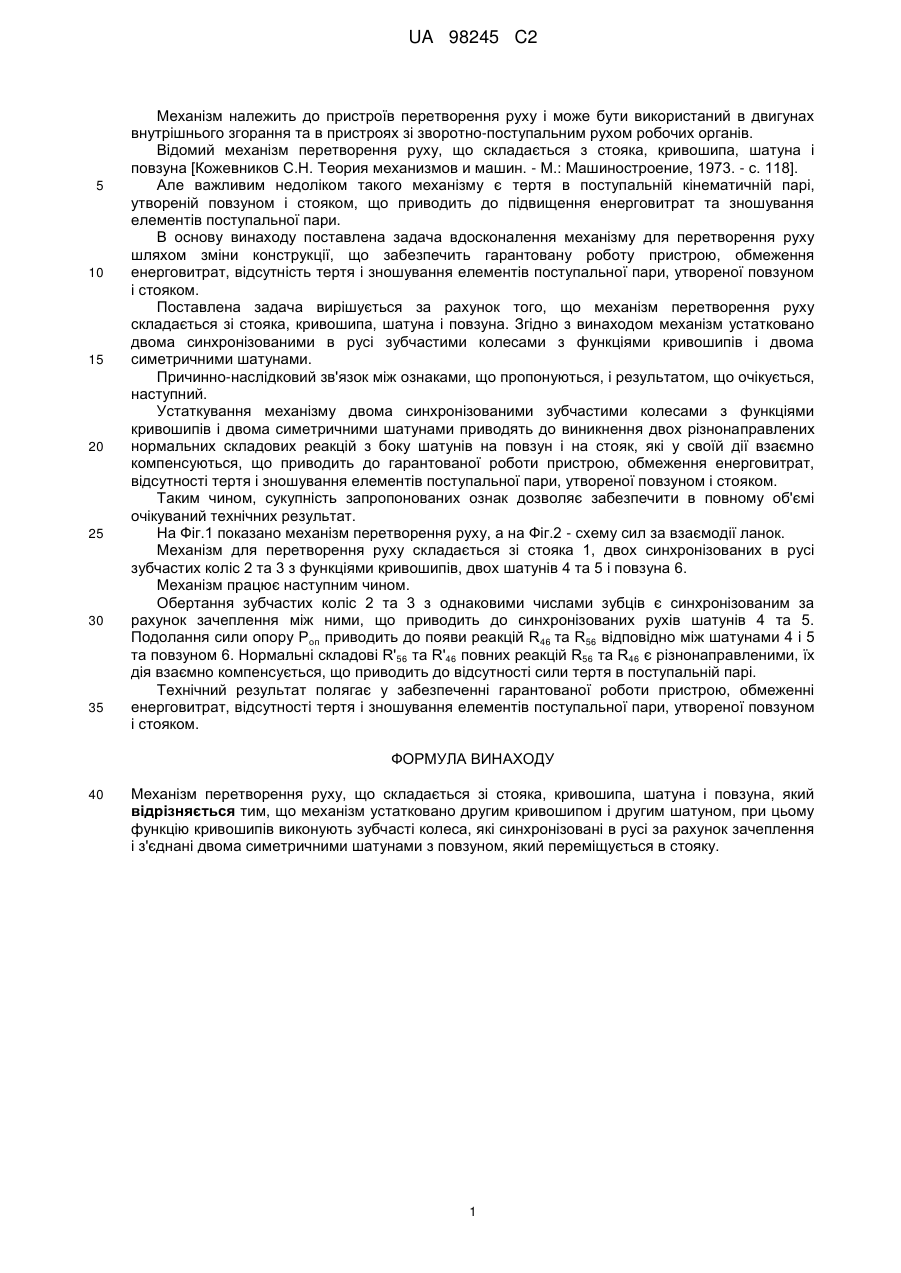
Реферат: Механізм належить до пристроїв перетворення руху і може бути використаний в двигунах внутрішнього згорання та в пристроях зі зворотно-поступальним рухом робочих органів. Механізм перетворення руху складається з стояка, кривошипа, шатуна і повзуна. Механізм устатковано двома синхронізованими в русі зубчастими колесами з функціями кривошипів і двома симетричними шатунами. Досягаються забезпечення гарантованої роботи пристрою, обмеження енерговитрат, відсутність тертя і зношування елементів поступальної пари, утвореної повзуном і стояком. UA 98245 C2 (12) UA 98245 C2 UA 98245 C2 5 10 15 20 25 30 35 Механізм належить до пристроїв перетворення руху і може бути використаний в двигунах внутрішнього згорання та в пристроях зі зворотно-поступальним рухом робочих органів. Відомий механізм перетворення руху, що складається з стояка, кривошипа, шатуна і повзуна [Кожевников С.Н. Теория механизмов и машин. - М.: Машиностроение, 1973. - с. 118]. Але важливим недоліком такого механізму є тертя в поступальній кінематичній парі, утвореній повзуном і стояком, що приводить до підвищення енерговитрат та зношування елементів поступальної пари. В основу винаходу поставлена задача вдосконалення механізму для перетворення руху шляхом зміни конструкції, що забезпечить гарантовану роботу пристрою, обмеження енерговитрат, відсутність тертя і зношування елементів поступальної пари, утвореної повзуном і стояком. Поставлена задача вирішується за рахунок того, що механізм перетворення руху складається зі стояка, кривошипа, шатуна і повзуна. Згідно з винаходом механізм устатковано двома синхронізованими в русі зубчастими колесами з функціями кривошипів і двома симетричними шатунами. Причинно-наслідковий зв'язок між ознаками, що пропонуються, і результатом, що очікується, наступний. Устаткування механізму двома синхронізованими зубчастими колесами з функціями кривошипів і двома симетричними шатунами приводять до виникнення двох різнонаправлених нормальних складових реакцій з боку шатунів на повзун і на стояк, які у своїй дії взаємно компенсуються, що приводить до гарантованої роботи пристрою, обмеження енерговитрат, відсутності тертя і зношування елементів поступальної пари, утвореної повзуном і стояком. Таким чином, сукупність запропонованих ознак дозволяє забезпечити в повному об'ємі очікуваний технічних результат. На Фіг.1 показано механізм перетворення руху, а на Фіг.2 - схему сил за взаємодії ланок. Механізм для перетворення руху складається зі стояка 1, двох синхронізованих в русі зубчастих коліс 2 та 3 з функціями кривошипів, двох шатунів 4 та 5 і повзуна 6. Механізм працює наступним чином. Обертання зубчастих коліс 2 та 3 з однаковими числами зубців є синхронізованим за рахунок зачеплення між ними, що приводить до синхронізованих рухів шатунів 4 та 5. Подолання сили опору Роп приводить до появи реакцій R46 та R56 відповідно між шатунами 4 і 5 та повзуном 6. Нормальні складові R'56 та R'46 повних реакцій R56 та R46 є різнонаправленими, їх дія взаємно компенсується, що приводить до відсутності сили тертя в поступальній парі. Технічний результат полягає у забезпеченні гарантованої роботи пристрою, обмеженні енерговитрат, відсутності тертя і зношування елементів поступальної пари, утвореної повзуном і стояком. ФОРМУЛА ВИНАХОДУ 40 Механізм перетворення руху, що складається зі стояка, кривошипа, шатуна і повзуна, який відрізняється тим, що механізм устатковано другим кривошипом і другим шатуном, при цьому функцію кривошипів виконують зубчасті колеса, які синхронізовані в русі за рахунок зачеплення і з'єднані двома симетричними шатунами з повзуном, який переміщується в стояку. 1 UA 98245 C2 Комп’ютерна верстка А. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюMotion converting mechanism
Автори англійськоюSokolenko Anatolii Ivanovych, Piddubnyi Volodymyr Antonovych
Назва патенту російськоюМеханизм преобразования движения
Автори російськоюСоколенко Анатолий Иванович, Поддубный Владимир Антонович
МПК / Мітки
МПК: F16C 7/00
Мітки: руху, перетворення, механізм
Код посилання
<a href="https://ua.patents.su/4-98245-mekhanizm-peretvorennya-rukhu.html" target="_blank" rel="follow" title="База патентів України">Механізм перетворення руху</a>
Механізм перетворення руху
Номер патенту: 65933
Опубліковано: 26.12.2011
Автори: Соколенко Анатолій Іванович, Піддубний Володимир Антонович
МПК: F16C 7/00
Мітки: руху, перетворення, механізм
Формула / Реферат:
Механізм перетворення руху, що складається зі стояка, кривошипа, шатуна і повзуна, який відрізняється тим, що механізм обладнано двома однаковими синхронізованими в русі за рахунок зачеплення і симетрично встановленими відносно лінії переміщення повзуна зубчастими колесами з функціями кривошипів і двома симетричними шатунами.
Механізм щелкунова для перетворення обертального руху в коливальний
Номер патенту: 29369
Опубліковано: 16.10.2000
Автори: Прищепа Микола Петрович, Щелкунов Єгор Єлисейович, Вороной Віталій Степанович
МПК: F16H 21/40
Мітки: коливальний, перетворення, руху, механізм, щелкунова, обертального
Формула / Реферат:
1. Механізм для перетворення обертального руху в коливальний, що містить кривошип, кінематично зв’язаний з коромислом, який відрізняється тим, що кінематичний зв’язок кривошипа з коромислом здійснено за допомогою шарніра, причому плечі коромисла мають можливість одночасно взаємодіяти з робочою поверхнею введеного у пристрій копіра, що має можливість обертатися, і рівні по довжині з радіусом кривошипа.2. Механізм за п. 1, який...
Механізм для перетворення обертового руху в поступальний

Номер патенту: 31151
Опубліковано: 15.12.2000
Автори: Маркович Юрій Іванович, Сиротюк Віктор Володимирович, Бойко Олександр Валерійович
МПК: H01Q 3/00, F16H 25/20
Мітки: руху, механізм, поступальний, обертового, перетворення
Текст:
...в отворі корпусу з можливістю осьового переміщення в ньому, зубчасті колеса додаткового кінематичного ланцюга встановлені на направляючій з можливістю обертання на ній і підпружинені в осьовому напрямі, гайка одним кінцем встановлена в підшипнику вихідної ланки механізму, а вал -також одним кінцем встановлений в підшипнику корпуса, при цьому число додаткових кінематичних ланцюгів не менше трьох. На фіг.1 зображено загальний вид...
Механізм для перетворення зворотно-поступального руху в обертальний і навпаки
Номер патенту: 3457
Опубліковано: 15.11.2004
Автор: Мущинський Анатолій Климович
МПК: F16H 21/16
Мітки: обертальний, зворотно-поступального, руху, перетворення, навпаки, механізм
Формула / Реферат:
1. Механізм для перетворення зворотно-поступального руху в обертальний і навпаки, що складається з поршня, шатуна і колінчастого вала, який відрізняється тим, що кривошип виконаний у вигляді планетарної передачі, яка складається з епіциклічної еліпсоїдної і внутрішньої шестерень із шевронними зубами, що знаходяться в постійному зачепленні.2. Механізм за п. 1, який відрізняється тим, що колінчастий вал виконаний простим і прямим,...
Механізм для перетворення зворотно-поступального руху в обертовий та навпаки і машина(варіанти), яка містить цей механізм
Номер патенту: 37285
Опубліковано: 15.05.2001
Автор: Адахан Кармелі
МПК: F01B 9/00, F04B 35/00
Мітки: навпаки, перетворення, машина(варіанти, яка, зворотно-поступального, руху, обертовий, містить, механізм
Формула / Реферат:
1. Механізм для перетворення зворотно-поступального руху в обертовий та навпаки, установлений між засобом обертання і засобом зворотно-поступального руху, один з яких є ведучим, а другий видимим, для того, щоб обертовий рух у засобі обертання відповідав зворотно-поступальному руху в засобі зворотно - поступального руху, який містить корпус» зворотно-поступальний елемент, що установлений з можливістю зворотно-поступального руху уздовж...
Попередній патент: Насос відцентровий
Наступний патент: Спосіб обробки та знешкодження осадів стічних вод
Випадковий патент: Установка промислової підготовки вуглеводневого газу