Спосіб керування тяговими електродвигунами послідовного збудження при виникненні надлишкового ковзання колісних пар
Номер патенту: 98440
Опубліковано: 27.04.2015
Автори: Андрійченко Володимир Павлович, Шпіка Микола Іванович, Бесараб Андрій Іванович

Формула / Реферат
Спосіб керування тяговими електродвигунами послідовного збудження при виникненні надлишкового ковзання колісних пар, в якому електродвигуни включені послідовно-паралельно і живляться від мережі постійного струму через імпульсні перетворювачі, зменшення тягового зусилля відбувається шляхом зменшення задання, який відрізняється тим, що задання зменшується пропорційно величині надлишкового ковзання колісних пар за допомогою зворотного зв'язку, який діє на той імпульсний перетворювач, що живить тягові електродвигуни, які зв'язані з колісними парами, що мають надлишкове ковзання.
Текст
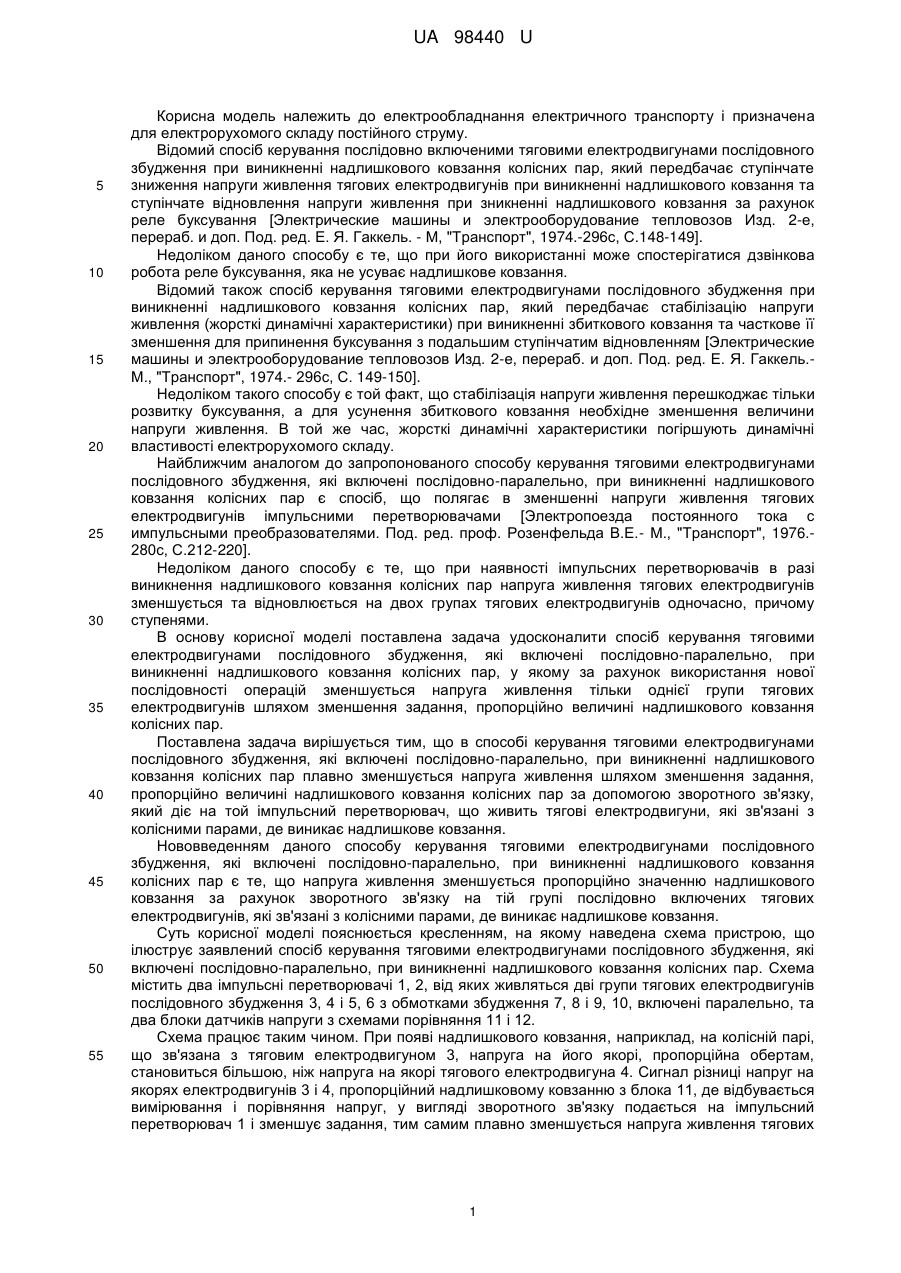
Реферат: Спосіб керування тяговими електродвигунами послідовного збудження при виникненні надлишкового ковзання колісних пар, в якому електродвигуни включені послідовно-паралельно і живляться від мережі постійного струму через імпульсні перетворювачі, зменшення тягового зусилля відбувається шляхом зменшення задання. Задання зменшується пропорційно величині надлишкового ковзання колісних пар за допомогою зворотного зв'язку, який діє на той імпульсний перетворювач, що живить тягові електродвигуни, які зв'язані з колісними парами, що мають надлишкове ковзання. UA 98440 U (54) СПОСІБ КЕРУВАННЯ ТЯГОВИМИ ЕЛЕКТРОДВИГУНАМИ ПОСЛІДОВНОГО ЗБУДЖЕННЯ ПРИ ВИНИКНЕННІ НАДЛИШКОВОГО КОВЗАННЯ КОЛІСНИХ ПАР UA 98440 U UA 98440 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до електрообладнання електричного транспорту і призначена для електрорухомого складу постійного струму. Відомий спосіб керування послідовно включеними тяговими електродвигунами послідовного збудження при виникненні надлишкового ковзання колісних пар, який передбачає ступінчате зниження напруги живлення тягових електродвигунів при виникненні надлишкового ковзання та ступінчате відновлення напруги живлення при зникненні надлишкового ковзання за рахунок реле буксування [Электрические машины и электрооборудование тепловозов Изд. 2-е, перераб. и доп. Под. ред. Е. Я. Гаккель. - М, "Транспорт", 1974.-296с, С.148-149]. Недоліком даного способу є те, що при його використанні може спостерігатися дзвінкова робота реле буксування, яка не усуває надлишкове ковзання. Відомий також спосіб керування тяговими електродвигунами послідовного збудження при виникненні надлишкового ковзання колісних пар, який передбачає стабілізацію напруги живлення (жорсткі динамічні характеристики) при виникненні збиткового ковзання та часткове її зменшення для припинення буксування з подальшим ступінчатим відновленням [Электрические машины и электрооборудование тепловозов Изд. 2-е, перераб. и доп. Под. ред. Е. Я. Гаккель.М., "Транспорт", 1974.- 296с, С. 149-150]. Недоліком такого способу є той факт, що стабілізація напруги живлення перешкоджає тільки розвитку буксування, а для усунення збиткового ковзання необхідне зменшення величини напруги живлення. В той же час, жорсткі динамічні характеристики погіршують динамічні властивості електрорухомого складу. Найближчим аналогом до запропонованого способу керування тяговими електродвигунами послідовного збудження, які включені послідовно-паралельно, при виникненні надлишкового ковзання колісних пар є спосіб, що полягає в зменшенні напруги живлення тягових електродвигунів імпульсними перетворювачами [Электропоезда постоянного тока с импульсными преобразователями. Под. ред. проф. Розенфельда В.Е.- М., "Транспорт", 1976.280с, С.212-220]. Недоліком даного способу є те, що при наявності імпульсних перетворювачів в разі виникнення надлишкового ковзання колісних пар напруга живлення тягових електродвигунів зменшується та відновлюється на двох групах тягових електродвигунів одночасно, причому ступенями. В основу корисної моделі поставлена задача удосконалити спосіб керування тяговими електродвигунами послідовного збудження, які включені послідовно-паралельно, при виникненні надлишкового ковзання колісних пар, у якому за рахунок використання нової послідовності операцій зменшується напруга живлення тільки однієї групи тягових електродвигунів шляхом зменшення задання, пропорційно величині надлишкового ковзання колісних пар. Поставлена задача вирішується тим, що в способі керування тяговими електродвигунами послідовного збудження, які включені послідовно-паралельно, при виникненні надлишкового ковзання колісних пар плавно зменшується напруга живлення шляхом зменшення задання, пропорційно величині надлишкового ковзання колісних пар за допомогою зворотного зв'язку, який діє на той імпульсний перетворювач, що живить тягові електродвигуни, які зв'язані з колісними парами, де виникає надлишкове ковзання. Нововведенням даного способу керування тяговими електродвигунами послідовного збудження, які включені послідовно-паралельно, при виникненні надлишкового ковзання колісних пар є те, що напруга живлення зменшується пропорційно значенню надлишкового ковзання за рахунок зворотного зв'язку на тій групі послідовно включених тягових електродвигунів, які зв'язані з колісними парами, де виникає надлишкове ковзання. Суть корисної моделі пояснюється кресленням, на якому наведена схема пристрою, що ілюструє заявлений спосіб керування тяговими електродвигунами послідовного збудження, які включені послідовно-паралельно, при виникненні надлишкового ковзання колісних пар. Схема містить два імпульсні перетворювачі 1, 2, від яких живляться дві групи тягових електродвигунів послідовного збудження 3, 4 і 5, 6 з обмотками збудження 7, 8 і 9, 10, включені паралельно, та два блоки датчиків напруги з схемами порівняння 11 і 12. Схема працює таким чином. При появі надлишкового ковзання, наприклад, на колісній парі, що зв'язана з тяговим електродвигуном 3, напруга на його якорі, пропорційна обертам, становиться більшою, ніж напруга на якорі тягового електродвигуна 4. Сигнал різниці напруг на якорях електродвигунів 3 і 4, пропорційний надлишковому ковзанню з блока 11, де відбувається вимірювання і порівняння напруг, у вигляді зворотного зв'язку подається на імпульсний перетворювач 1 і зменшує задання, тим самим плавно зменшується напруга живлення тягових 1 UA 98440 U 5 електродвигунів 3, 4, що приводить до поновлення щеплення. У міру поновлення щеплення плавно збільшується напруга живлення тягових електродвигунів 3, 4. Таким чином, запропонований спосіб забезпечує ефективне керування тяговими електродвигунами послідовного збудження, які включені послідовно-паралельно, при виникненні надлишкового ковзання колісних пар. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Спосіб керування тяговими електродвигунами послідовного збудження при виникненні надлишкового ковзання колісних пар, в якому електродвигуни включені послідовно-паралельно і живляться від мережі постійного струму через імпульсні перетворювачі, зменшення тягового зусилля відбувається шляхом зменшення задання, який відрізняється тим, що задання зменшується пропорційно величині надлишкового ковзання колісних пар за допомогою зворотного зв'язку, який діє на той імпульсний перетворювач, що живить тягові електродвигуни, які зв'язані з колісними парами, що мають надлишкове ковзання. Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюAndriichenko Volodymyr Pavlovych
Автори російськоюАндрийченко Владимир Павлович
МПК / Мітки
МПК: B60L 3/10
Мітки: збудження, колісних, спосіб, надлишкового, електродвигунами, ковзання, керування, виникненні, послідовного, пар, тяговими
Код посилання
<a href="https://ua.patents.su/4-98440-sposib-keruvannya-tyagovimi-elektrodvigunami-poslidovnogo-zbudzhennya-pri-viniknenni-nadlishkovogo-kovzannya-kolisnikh-par.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування тяговими електродвигунами послідовного збудження при виникненні надлишкового ковзання колісних пар</a>
Система керування тяговими електродвигунами вагонів метрополітену
Номер патенту: 73295
Опубліковано: 25.09.2012
Автори: Бочкарьов Алєксандр Васільєвіч, Вавілов Євгєній Ніколаєвіч, Азімов Узген Мадаміновіч, Бондарєнко Вячеслав Ігорєвіч
МПК: B60L 15/00
Мітки: тяговими, вагонів, електродвигунами, керування, система, метрополітену
Формула / Реферат:
Система керування тяговими електродвигунами вагонів метрополітену, що містить датчики струму і напруги, яка відрізняється тим, що має в своєму складі: перший датчик струму, який використовується для здійснення контролю номінальних і аварійних струмів в першій групі тягових електродвигунів, і призначений для встановлення послідовно з тяговими електродвигунами першої групи двигунів, другий датчик струму, який використовується для здійснення...
Спосіб протибуксувального впливу на тяговий двигун послідовного збудження
Номер патенту: 94488
Опубліковано: 10.11.2014
Автори: Матвійчук Дмитро Анатолійович, Петренко Олександр Миколайович, Андрійченко Володимир Павлович
МПК: H02P 7/00
Мітки: тяговий, спосіб, збудження, двигун, послідовного, впливу, протибуксувального
Формула / Реферат:
Спосіб протибуксувального впливу на тяговий двигун послідовного збудження, що полягає у збільшенні струму в послідовній обмотці збудження шляхом підживлення обмотки, який відрізняється тим, що збільшення струму в послідовній обмотці здійснюють за допомогою DC-DC перетворювача, вхід якого під'єднують від еквіпотенціальних вузлів паралельно ввімкнених двигунів, а вихід під'єднують паралельно обмотці буксуючого двигуна.
Спосіб ослаблення поля тягових електродвигунів послідовного збудження
Номер патенту: 90544
Опубліковано: 26.05.2014
Автори: Мовчан Анастасія Миколаївна, Бесараб Андрій Іванович, Андрійченко Володимир Павлович, Шпіка Микола Іванович
МПК: H02P 7/00
Мітки: тягових, поля, спосіб, ослаблення, електродвигунів, збудження, послідовного
Формула / Реферат:
Спосіб ослаблення поля тягових електродвигунів послідовного збудження, які включені паралельно, що полягає у зменшенні струму в послідовних обмотках збудження за допомогою DC/DC перетворювача шляхом шунтування входом цього DC/DC перетворювача обмотки збудження першого електродвигуна та розмагнічення виходом цього ж DC/DC перетворювача обмотки збудження другого електродвигуна, який відрізняється тим, що здійснюють додаткове розмагнічення...
Пристрій для ослаблення поля тягових електродвигунів послідовного збудження
Номер патенту: 92990
Опубліковано: 10.09.2014
Автори: Андрійченко Володимир Павлович, Шпіка Микола Іванович, Бесараб Андрій Іванович, Мовчан Анастасія Миколаївна
МПК: H02P 7/00
Мітки: ослаблення, збудження, електродвигунів, послідовного, тягових, пристрій, поля
Формула / Реферат:
Пристрій для ослаблення поля тягових електродвигунів послідовного збудження, включених паралельно, в якому вхід DC/DC перетворювача підключений до обмотки збудження першого електродвигуна, а вихід - до обмотки збудження другого електродвигуна, який відрізняється тим, що додатково введено другий DC/DC перетворювач, вхід якого підключений до обмотки збудження другого електродвигуна, а вихід підключено до акумуляторної батареї та ланцюгів...
Пристрій для випробування електричних машин постійного струму послідовного збудження
Номер патенту: 75689
Опубліковано: 10.12.2012
Автор: Афанасов Андрій Михайлович
МПК: H02K 51/00
Мітки: збудження, пристрій, машин, випробування, струму, послідовного, електричних, постійного
Формула / Реферат:
Пристрій для випробування електричних машин постійного струму послідовного збудження, який містить електричні двигун та генератор, вали яких з'єднані між собою, електричне джерело живлення, до якого підключено паралельно обмотку якоря генератора та з'єднані послідовно між собою обмотку якоря двигуна, обмотку збудження двигуна та обмотку збудження генератора, який відрізняється тим, що паралельно обмотці збудження двигуна підключено регулятор...
Попередній патент: Пристрій для перфораційного посіву
Наступний патент: Люмінесцентні координаційні сполуки тербію зеленого світіння для захисту цінних паперів та документів від підробок
Випадковий патент: Безалкогольний напій "чорничка"