Система керування тяговими електродвигунами вагонів метрополітену
Номер патенту: 73295
Опубліковано: 25.09.2012
Автори: Бочкарьов Алєксандр Васільєвіч, Бондарєнко Вячеслав Ігорєвіч, Вавілов Євгєній Ніколаєвіч, Азімов Узген Мадаміновіч
Формула / Реферат
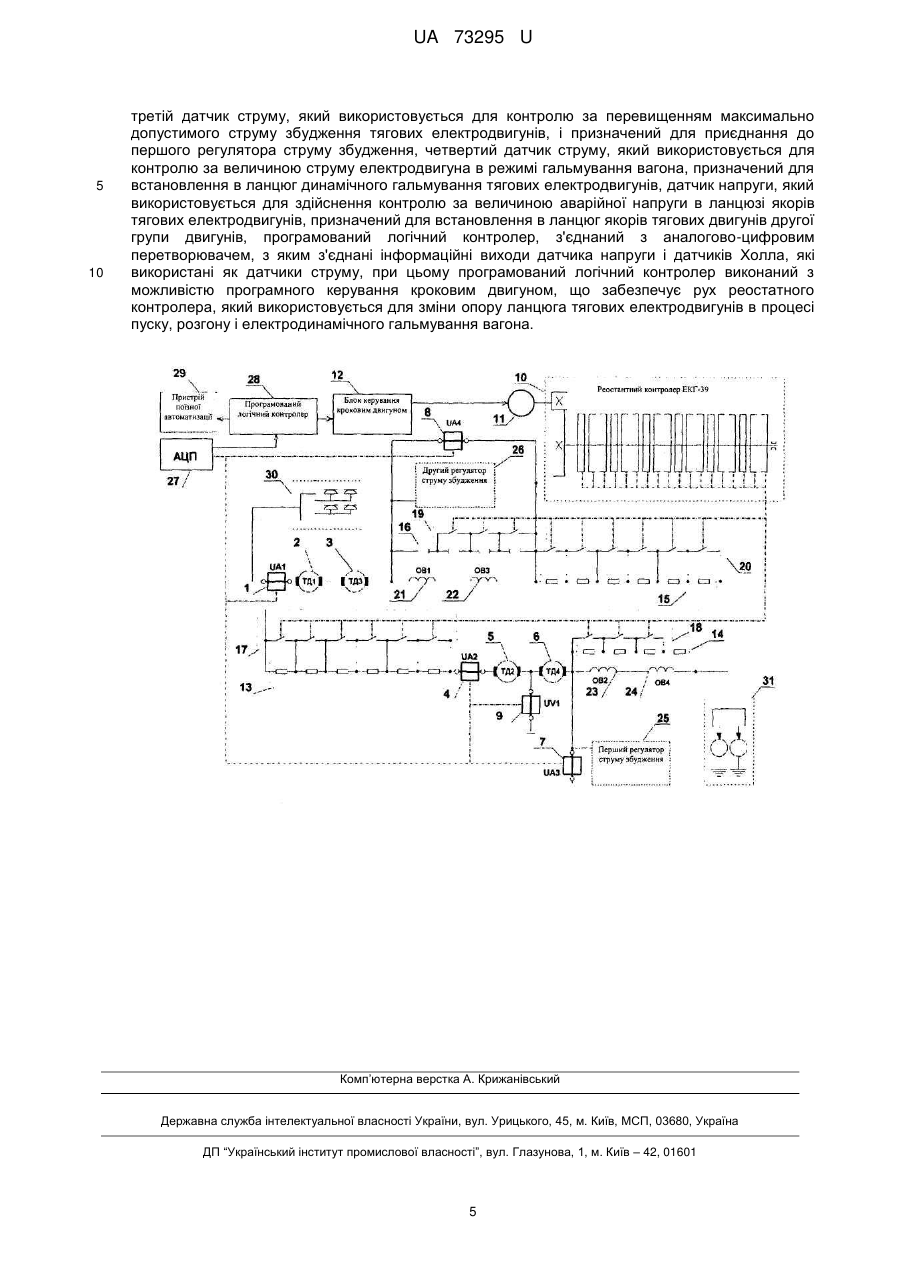
Система керування тяговими електродвигунами вагонів метрополітену, що містить датчики струму і напруги, яка відрізняється тим, що має в своєму складі: перший датчик струму, який використовується для здійснення контролю номінальних і аварійних струмів в першій групі тягових електродвигунів, і призначений для встановлення послідовно з тяговими електродвигунами першої групи двигунів, другий датчик струму, який використовується для здійснення контролю номінальних і аварійних струмів другої групи тягових електродвигунів, призначений для встановлення послідовно з тяговими електродвигунами другої групи двигунів, третій датчик струму, який використовується для контролю за перевищенням максимально допустимого струму збудження тягових електродвигунів, і призначений для приєднання до першого регулятора струму збудження, четвертий датчик струму, який використовується для контролю за величиною струму електродвигуна в режимі гальмування вагона, призначений для встановлення в ланцюг динамічного гальмування тягових електродвигунів, датчик напруги, який використовується для здійснення контролю за величиною аварійної напруги в ланцюзі якорів тягових електродвигунів, призначений для встановлення в ланцюг якорів тягових двигунів другої групи двигунів, програмований логічний контролер, з'єднаний з аналогово-цифровим перетворювачем, з яким з'єднані інформаційні виходи датчика напруги і датчиків Холла, які використані як датчики струму, при цьому програмований логічний контролер виконаний з можливістю програмного керування кроковим двигуном, що забезпечує рух реостатного контролера, який використовується для зміни опору ланцюга тягових електродвигунів в процесі пуску, розгону і електродинамічного гальмування вагона.
Текст
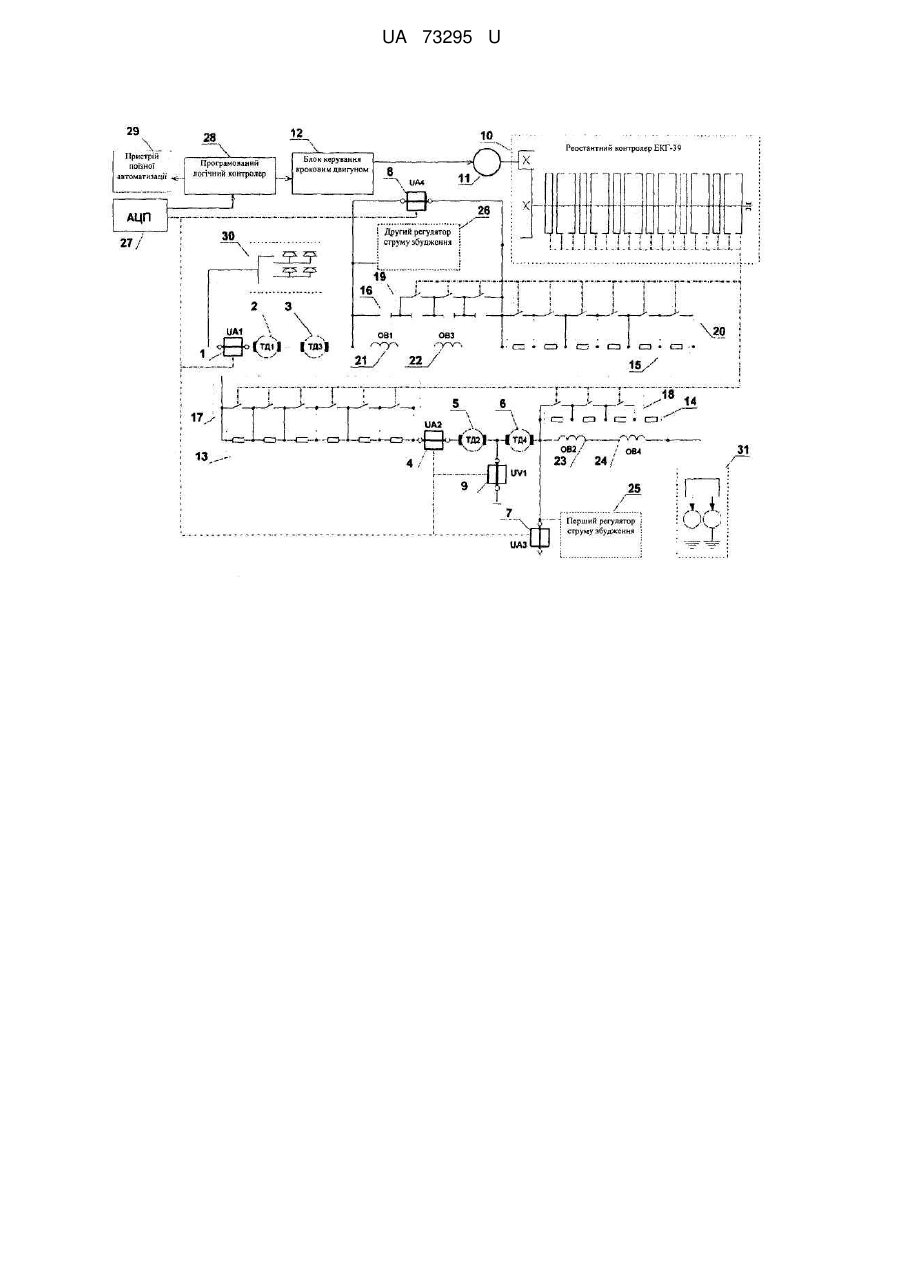
Реферат: Система керування тяговими електродвигунами вагонів метрополітену містить перший датчик струму, другий датчик струму, третій датчик струму, четвертий датчик струму, датчик напруги, програмований логічний контролер, аналогово-цифровий перетворювач, датчик напруги і датчик Холла, кроковий двигун. UA 73295 U (12) UA 73295 U UA 73295 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель стосується електричних систем керування тяговими електродвигунами вагонів метрополітену і є функціональною частиною електричної принципової схеми вагона. Заявляється загальна система керування тяговими електродвигунами вагонів метрополітену і її функціональні частини (підсистеми): система захисту і контролю тягових двигунів і система контролю струму тягових електродвигунів в режимі динамічного гальмування. Як найближчий аналог вибрана Система керування тяговими електродвигунами вагонів метрополітену [Акціонерне товариство "МЕТРОВАГОНМАШ". Посібник по експлуатації вагонів метрополітену моделей 81-717.5 і 81-714.5, - М.: Транспорт, 1993. - С. 193, (Мал. 8.5 Силова схема електричних ланцюгів тягового електроприводу)]. У цій схемі застосовані контактні апарати комутації і контролю, такі як: - реостатний контролер (типу ЕКГ-39) з набором силових контактів РК1-РК26 (типу КЕ-47) і сервоприводом СДРК (типу ПЛ-072Г), що виконує функцію одного з основних комутуючих пристроїв якірних ланцюгів тягових електродвигунів, - реле прискорення і гальмування РПГ (типу Р-52Б), яке використовується для контролю величин пускових і гальмівних струмів в ланцюгах тягових електродвигунів з формуванням вставок їх обмеження з урахуванням режиму роботи силової схеми вагона і його завантаження. - реле перевантаження РГІ (типу РМ-3001) з групою реле струму, яке використовується для контролю величини аварійних струмів в ланцюгах тягових електродвигунів (функція РГІ 1-3, РП2-4, РГІЛ), контролю струму в ланцюзі обмоток збудження тягових електродвигунів (функція РЗ-3), а також наявності аварійної напруги в якірному ланцюгу в гальмівному режимі (функція РЗ-1). - реле контролю гальмівного струму РКГС (типу Р-52Б), яке здійснює контроль величини струму тягових двигунів в режимі електродинамічного гальмування; контакти реле включені в послідовний ланцюг контролю електродинамічного гальмування вагонів поїзда, який впливає на пристрої поїзної автоматики. - реле струму РС2 (типу РЕВ-830), яке здійснює контроль величини струму тягових двигунів в режимі електродинамічного гальмування і при зниженні струму гальмівного контуру здійснює включення вентиля заміщення пневматичного гальма. Використовуване в схемі електромагнітне реле спрацьовує при досягненні порогових величини пускових і гальмівних струмів, і перемикають елементи схеми керування вагоном. Основним недоліком роботи схеми є погрішність спрацьовування електромагнітного реле, що викликається зносом опорних вузлів якорів реле. Крім того, погрішність спрацьовування зумовлюється ручною механічною настройкою, що приводить до порушень режимів керування процесом введення-виведення струмообмежувальних резисторів ланцюга тягових електродвигунів. Для вагонів, обладнаних тяговими двигунами типу ДК-116, перевищення граничних вставок пускових і гальмівних струмів в більшості випадків викликає круговий вогонь по колектору двигуна, особливо в режимі роботи в зоні ослаблення поля. Реостатний контролер призначений для зміни опору ланцюга тягових електродвигунів в процесі пуску, розгону і електродинамічного гальмування вагона. Рух вала реостатного контролера забезпечується сервоприводом, до складу якого входить електродвигун постійного струму (типу ПЛ-072Г). Зусилля від двигуна на кулачковий вал реостатного контролера передається через двоступеневий черв'ячний редуктор і з'єднувальну муфту. У вагонах серії Ε на валу черв'ячного редуктора встановлене дискове електромагнітне гальмо. Задача сервоприводу - забезпечення обертання і точної зупинки вала реостатного контролера в заданих позиціях під впливом елементів загальної схеми керування. У процесі інтенсивної експлуатації механічні елементи приводу, що передають обертання валу реостатного контролера, зношуються, з'являються люфти, що впливають на зниження точності зупинки вала в заданій позиції. Це в свою чергу істотно відбивається на процесі комутації, додатково скорочує термін служби контактів силових ланцюгів РК1-РК26 реостатного контролера і, як правило, спричиняє появу аварійних струмів в ланцюгах тягових двигунів і їх перевантаження. Аналог корисної моделі - Система захисту і контролю тягових електродвигунів, є функціональна частина описаної вище схеми. Представлена на Силовій схемі електричних ланцюгів тягового електроприводу Система захисту і контролю тягових електродвигунів включає описані вище елементи: реле прискорення і гальмування РПГ, реле перевантаження РП з групою реле РПЛ, РШ-3, РП2-4, РЗ-3 і РЗ-1. Ця схема застосовно до вагонів моделей 81717 і 81-714 реалізовується в окремому ящику - ящик ЯР-13. Аналог корисної моделі - Система контролю струму тягових електродвигунів в режимі динамічного гальмування, є інша функціональна частина описаної вище схеми. Аналог цієї системи має в своєму складі два електромагнітних реле: 1 UA 73295 U 5 10 15 20 25 30 35 40 45 50 55 60 - реле контролю гальмівного струму РКГС, - реле струму РТ2 Ця схема застосована до вагонів моделей 81-717 і 81-714 реалізовується в окремому ящику - ящик ЯР-27. У основу корисної моделі поставлена задача розширення арсеналу засобів і створення нової, надійної в експлуатації, системи керування тяговими електродвигунами вагонів метрополітену і підсистем, що входять в неї: системи захисту і контролю тягових електродвигунів і системи контролю струму гальмування тягових електродвигунів. Технічний результат, що досягається, - забезпечення точної зупинки вала реостатного контролера в заданій позиції за рахунок можливості застосування крокового двигуна, що точно позиціонується програмованою електронною схемою керування. Поставлена задача вирішується тим, що система керування тяговими електродвигунами вагонів метрополітену містить датчики струму і напруги, згідно з корисною моделлю, має в своєму складі: - перший датчик струму, що використовується для здійснення контролю номінальних і аварійних струмів в першій групі тягових електродвигунів, і призначений для установлення послідовно з тяговими електродвигунами першої групи двигунів, - другий датчик струму, що використовується для здійснення контролю номінальних і аварійних струмів другої групи тягових електродвигунів, призначений для установлення послідовно з тяговими електродвигунами другої групи двигунів, - третій датчик струму, що використовується для контролю за перевищенням максимально допустимого струму збудження тягових електродвигунів і призначений для приєднання до першого регулятора струму збудження, - четвертий датчик струму, що використовується для контролю за величиною струму електродвигуна в режимі гальмування вагона, призначений для установлення в ланцюг динамічного гальмування тягових електродвигунів, - датчик напруги, що використовується для здійснення контролю за величиною аварійної напруги в ланцюзі якорів електродвигунів, призначений для установлення в ланцюг якорів тягових електродвигунів другої групи двигунів, - програмований логічний контролер, з'єднаний з аналогово-цифровим перетворювачем, з яким з'єднані інформаційні виходи датчика напруги і датчиків струму, як які використані датчики Холла, при цьому програмований логічний контролер виконаний з можливістю програмного керування кроковим двигуном, що забезпечує рух вала реостатного контролера, що використовується для зміни опору ланцюга тягових електродвигунів в процесі пуску, розгону і електродинамічного гальмування вагона. Система захисту і контролю тягових електродвигунів характеризується тим, що містить датчики струму і напруги і від аналога відрізняється тим, що має в своєму складі: - перший датчик струму, що використовується для здійснення контролю номінальних і аварійних струмів в першій групі тягових електродвигунів, і призначений для установлення послідовно з тяговими електродвигунами першої групи двигунів, - другий датчик струму, що використовується для здійснення контролю номінальних і аварійних струмів другої групи тягових електродвигунів, призначений для установлення послідовно з тяговими електродвигунами другої групи двигунів, - третій датчик струму, що використовується для контролю за перевищенням максимально допустимого струму збудження тягових електродвигунів, і призначений для приєднання до першого регулятора струму збудження, - датчик напруги, що використовується для здійснення контролю за величиною аварійної напруги в ланцюзі якорів електродвигунів, призначений для установлення в ланцюг якорів тягових двигунів другої групи двигунів, - програмований логічний контролер, з'єднаний з аналогово-цифровим перетворювачем, з яким з'єднані інформаційні виходи датчика напруги і датчиків струму, за які використані датчики Холла, при цьому програмований логічний контролер виконаний з можливістю програмного керування кроковим двигуном, що забезпечує рух реостатного контролера, що використовується для зміни опору ланцюга тягових електродвигунів в процесі пуску, розгону і електродинамічного гальмування вагона. Система контролю струму тягових електродвигунів в режимі динамічного гальмування характеризується тим, що містить датчик струму, який використовується для контролю за величиною струму тягових електродвигунів в режимі динамічного гальмування вагона, призначений для установлення в ланцюг динамічного гальмування тягових електродвигунів, як датчик струму використаний датчик Холла, інформаційний вихід якого приєднаний через 2 UA 73295 U 5 10 15 20 25 30 35 40 45 50 55 60 аналогово-цифровий перетворювач до програмованого логічного контролера, який виконаний з можливістю програмного керування кроковим двигуном, що забезпечує рух реостатного контролера, що використовується для зміни опору ланцюга тягових електродвигунів в процесі пуску, розгону і електродинамічного гальмування вагона. Для того, щоб краще продемонструвати відмітні особливості корисної моделі, як приклад, що не має якого-небудь обмежувального характеру, нижче описаний переважний варіант реалізації застосовно до вагонів метрополітену моделей 81-717, 81-714 і їх модифікацій. Приклад реалізації ілюструється Фігурою креслення, на якій представлена функціональна схема Системи керування тяговими електродвигунами вагонів метрополітену (в ходовому режимі) і підсистеми, що входять в неї (в ходовому режимі). Перший датчик струму 1 (UA1) встановлений послідовно з тяговими електродвигунами 2, 3 першої групи двигунів, другий датчик струму 4 (UA2) встановлений послідовно з тяговими електродвигунами 5, 6 другої групи двигунів. Датчики 1, 4 призначені для здійснення контролю номінальних і аварійних струмів в цих групах. Третій датчик струму 7 (UA3) ввімкнутий в перший регулятор струму збудження 25 і призначений для контролю за перевищенням максимально допустимого струму збудження тягових електродвигунів. Четвертий датчик струму 8 (UA4) встановлений в ланцюг динамічного гальмування і призначений для здійснення контролю за величиною струму тягових електродвигунів в режимі динамічного гальмування вагона. Як датчики струму (позиції 1, 4, 7, 8) можуть бути використані датчики струму Холла, наприклад, LT500-T7SP93, виробництва ТОВ "ТВЕЛЕМ" м. Твер. Датчик напруги 9 (UV1), наприклад, LV100/SP84 того ж виробника, встановлений в ланцюг якорів тягових двигунів (5, 6) і призначений для здійснення контролю за величиною аварійної напруги в ланцюзі якорів цих двигунів. Реостатний контролер 10 призначений для зміни опору ланцюга тягових електродвигунів в процесі пуску, розгону і електродинамічного гальмування вагона. Рух вала реостатного контролера забезпечується сервоприводом, у вигляді якого використовується кроковий двигун 11 (СДРК), наприклад, FL110STH150, забезпечений блоком керування 12 кроковим двигуном. Паралельно кожному струмообмежувальному резистору чотирьох блоків 13-16 резисторів підключений шунтувальний контакт, відповідно чотирьох блоків 17-20 контактів реостатного контролера. Блок 16 резисторів ввімкнутий паралельно з обмотками збудження 21,22 (031 і 033) тягових електродвигунів 2, 3, блок 14 резисторів - паралельно парі обмоток 23,24 (032 і 034) тягових електродвигунів 5,6; відповідно блок 15 резисторів - послідовно обмоткам збудження 21, 22 (031 і 032) тягових електродвигунів 2,3, а блок 13 резисторів - послідовно якірного ланцюга другої групи тягових електродвигунів 5,6. Паралельно обмоткам збудження 23, 24 підключений перший регулятор 25 струму збудження, а паралельно обмоткам 21, 22 - другий регулятор 26 струму збудження. Регулятори 25, 26 призначені для імпульсного регулювання середнього значення струму збудження тягових електродвигунів в режимі динамічного гальмування. Регулятори 25, 26 струму збудження є елементами функціональної частини загальної системи керування - Системи контролю струму тягових електродвигунів в режимі динамічного гальмування (третій об'єкт корисної моделі). Третій датчик струму 7 приєднаний до першого регулятора струму 25 і здійснює контроль струму в обмотках збудження 23, 24 тягових електродвигунів 5, 6 в режимі динамічного гальмування. Четвертий датчик струму 8 (UA4) встановлений паралельно обмоткам збудження 21 і 22, і, відповідно, другому регулятору 26 струму збудження. Інформаційні виходи датчиків струму 1, 4, 7, 8 і датчика напруги 9 через АЦП 27 приєднані до програмованого логічного контролера 28, один вихід якого приєднаний до блока керування 12 кроковим двигуном реостатного контролера 10, а другий - до пристроїв поїзної автоматики 29 вагона, призначених для автоматичного регулювання швидкості вагона і аварійного відключення силової схеми вагона при несправностях електричної схеми і апаратів. Ланцюг з послідовно з'єднаних: першого датчика струму 1; групи тягових електродвигунів 2,3; послідовно з'єднаних обмоток збудження 21,22 цих двигунів; блоків 15 і 13 струмообмежувальних резисторів; датчика струму 4; групи тягових електродвигунів 5,6; послідовно з'єднаних обмоток збудження 23, 24 цих двигунів - приєднана до струмоприймача 30 і струмовідводу 31. Система захисту і контролю тягових електродвигунів включає в себе: перший датчик струму 1 (UA1), встановлений послідовно групі тягових електродвигунів 2, 3; другий датчик струму 4 3 UA 73295 U 5 10 15 20 25 30 35 40 45 50 (UA2), встановлений послідовно групі тягових електродвигунів 5, 6; третій датчик струму 7 (UA3), приєднаний до першого регулятора 25 струму збудження і здійснює контроль струму в обмотках збудження 23, 24 тягових електродвигунів 5, 6 в режимі динамічного гальмування; датчик напруги 9 (UV1) встановлений в ланцюг якорів тягових електродвигунів (5, 6) і призначений для здійснення контролю за величиною аварійної напруги в ланцюзі якорів цих двигунів. Ця система може бути реалізована в окремому (першому) блоці, що замінює ящик ЯР13 вагонів метрополітену. Система контролю струму тягових електродвигунів в режимі динамічного гальмування включає в себе датчик струму 8 (UA4), встановлений паралельно обмоткам збудження 21 і 22, і, відповідно, другому регулятору 26 струму збудження. Ця система може бути реалізована у другому блоці, що замінює ящик ЯР-27. Загальними пристроями для двох вищеописаних систем є аналогово-цифровий перетворювач 27 і програмований логічний контролер 28. Тому при розділенні загальної системи керування на описані вище підсистеми можливі варіанти реалізації, коли аналоговоцифровий перетворювач 27 і програмований логічний контролер 28 змонтовані в першому або другому блоці (аналога ЯР-13 або аналога ЯР-27). У ходовому режимі вагона система функціонує таким чином: Як описано вище, паралельно кожному струмообмежувальному резистору чотирьох блоків 13-16 резисторів підключений шунтувальний контакт, відповідно чотирьох блоків 17-20 контактів реостатного контролера. Під впливом програмно керованого (блок керування 12) вал реостатного контролера 10 починає обертання і своїми контактами шунтує струмообмежувальні резистори, виводячи їх з якірного ланцюга і ланцюга збудження тягових електродвигунів. Зміна амперажу фіксується датчиками струму 1, 4, 7, їх сигнали надходять на аналогово-цифровий перетворювач 27, оцифровуються і надходять в програмований логічний контролер 28. При перевищенні струму тягових двигунів його номінального значення, величина фіксується датчиками струму 1 і 4, обробляється центральним процесором програмованого логічного контролера 28 і порівнюється з програмно заданою номінальною вставкою струму. При цьому виробляється сигнал зупинки крокового двигуна реостатного контролера, і уривається процес збільшення струму в силовому ланцюгу. У процесі розгону тягових двигунів величина струму зменшується. Датчики струму 1 і 4 фіксують зменшення величини струму в ланцюзі тягових електродвигунів. Сигнал обробляється центральним процесором програмованого логічного контролера і при зниженні поточного значення до величини вставки, заданої програмою, виробляється команда на включення крокового двигуна 11, яка надходить на блок керування 12 кроковим двигуном і процес розгону продовжується. При виникненні несправностей і короткого замикання в ланцюзі тягових електродвигунів датчики струму 1, 4, 7 і датчик напруги 9, фіксують аварійні значення струмів І напруги. Відповідні сигнали з цих датчиків Холла обробляються програмованим логічним контролером 28, порівнюються зі значеннями програмних аварійних уставлень і виробляються керуючі впливи на пристрої поїзної автоматики 29, які проводять аварійне вимкнення силової схеми вагона. У режимі динамічного гальмування контроль за величиною струму здійснюється датчиком струму 8. Сигнали датчика 8 обробляються центральним процесором програмованого логічного контролера 28, який формує керуючий вплив на пристрої поїзної автоматики 29 з урахуванням програмних уставлень. Таким чином, в корисній моделі змінена принципова схема, і електромагнітне реле замінене на датчики Холла. Це дозволило використати програмно керований кроковий двигун для формування закону руху вала реостатного контролера по сигналах зворотного зв'язку, що формуються датчиками. Заміна електродвигуна з редуктором на кроковий двигун підвищує точність позиціонування вала контролера, а також точність і надійність керування тяговими електродвигунами. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 Система керування тяговими електродвигунами вагонів метрополітену, що містить датчики струму і напруги, яка відрізняється тим, що має в своєму складі: перший датчик струму, який використовується для здійснення контролю номінальних і аварійних струмів в першій групі тягових електродвигунів, і призначений для встановлення послідовно з тяговими електродвигунами першої групи двигунів, другий датчик струму, який використовується для здійснення контролю номінальних і аварійних струмів другої групи тягових електродвигунів, призначений для встановлення послідовно з тяговими електродвигунами другої групи двигунів, 4 UA 73295 U 5 10 третій датчик струму, який використовується для контролю за перевищенням максимально допустимого струму збудження тягових електродвигунів, і призначений для приєднання до першого регулятора струму збудження, четвертий датчик струму, який використовується для контролю за величиною струму електродвигуна в режимі гальмування вагона, призначений для встановлення в ланцюг динамічного гальмування тягових електродвигунів, датчик напруги, який використовується для здійснення контролю за величиною аварійної напруги в ланцюзі якорів тягових електродвигунів, призначений для встановлення в ланцюг якорів тягових двигунів другої групи двигунів, програмований логічний контролер, з'єднаний з аналогово-цифровим перетворювачем, з яким з'єднані інформаційні виходи датчика напруги і датчиків Холла, які використані як датчики струму, при цьому програмований логічний контролер виконаний з можливістю програмного керування кроковим двигуном, що забезпечує рух реостатного контролера, який використовується для зміни опору ланцюга тягових електродвигунів в процесі пуску, розгону і електродинамічного гальмування вагона. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of traction motors of subway cars
Автори англійськоюAzimov Uzhen Madaminovich, Bochkariov Alieksandr Vasilievich, Vavilov Yevhienii Nikolaievich, Bondarienko Viacheslav Ihorievich
Назва патенту російськоюСистема управления тяговыми электродвигателями вагонов метрополитена
Автори російськоюАзимов Узген Мадаминович, Бочкарев Александр Васильевич, Вавилов Евгений Николаевич, Бондаренко Вячеслав Игоревич
МПК / Мітки
МПК: B60L 15/00
Мітки: метрополітену, система, керування, вагонів, тяговими, електродвигунами
Код посилання
<a href="https://ua.patents.su/7-73295-sistema-keruvannya-tyagovimi-elektrodvigunami-vagoniv-metropolitenu.html" target="_blank" rel="follow" title="База патентів України">Система керування тяговими електродвигунами вагонів метрополітену</a>
Вибухозахищена система керування електродвигунами
Номер патенту: 25745
Опубліковано: 27.08.2007
Автори: Токарєв Ігор Іванович, Шманьов Сергій Вікторович
МПК: H02P 1/00
Мітки: керування, електродвигунами, система, вибухозахищена
Формула / Реферат:
1. Вибухозахищена система керування електродвигунами, що містить пускачі, автоматичні вимикачі, пристрої плавного пуску, яка відрізняється тим, що всі компоненти системи виконані у вигляді окремих блоків в герметичних нерозбірних оболонках, розмірні параметри яких мінімальні і відповідають габаритам і вимогам компонування внутрішніх елементів, а також оснащені рознімними електричними з'єднаннями з можливістю швидкої заміни блока або його...
Вибухобезпечний пристрій керування електродвигунами

Номер патенту: 69994
Опубліковано: 25.05.2012
Автори: Омельченко Олександр Миколайович, Кац Олександр Борисович, Дубинський Андрій Олександрович, Вареник Євген Олександрович, Бочаров Михайло Костянтинович, Марейченко Іван Вячеславович
МПК: H02B 13/00, H02P 7/00
Мітки: пристрій, керування, електродвигунами, вибухобезпечний
Формула / Реферат:
1. Вибухобезпечний пристрій керування електродвигунами, що містить корпус, який складається з двох послідовно з'єднаних відділень, закритих кришками, в першому з яких розміщені роз'єднувач, блок живлення, апаратура комутації та контролю, блоки керування та захисту, які електрично пов'язані з перетворювачем частоти, що установлений у другому відділенні, в верхній частині першого відділення корпуса розміщена клемна коробка із кабельними...
Комплектний пристрій керування трифазними асинхронними електродвигунами з короткозамкненим ротором, вибухобезпечний
Номер патенту: 48393
Опубліковано: 15.06.2004
Автори: Стаднік Микола Іванович, Ведерніков Олександр Іванович, Сергієв Андрій Володимирович, Мезніков Артур Володимирович
МПК: H02H 11/00
Мітки: вибухобезпечний, асинхронними, ротором, пристрій, комплектний, короткозамкненим, керування, трифазними, електродвигунами
Формула / Реферат:
1. Комплектний пристрій керування трифазними асинхронними електродвигунами з короткозамкненим ротором, вибухобезпечний, що містить задану кількість виконавчих органів, блоків дистанційного керування, блоків контролю опору ізоляції силових приєднань, який відрізняється тим, що містить блок логіки, який оснащений відповідною програмою керування, принаймні один електродвигун з принаймні двома статорними обмотками, при цьому виходи блока логіки...
Пристрій керування трифазними асинхронними електродвигунами з короткозамкненим ротором
Номер патенту: 5815
Опубліковано: 15.03.2005
Автори: Мезніков Артур Володимирович, Полубєдов Микола Анатолійович, Стаднік Микола Іванович
МПК: H02P 6/00
Мітки: асинхронними, електродвигунами, керування, ротором, пристрій, короткозамкненим, трифазними
Формула / Реферат:
1. Пристрій керування трифазними асинхронними електродвигунами з короткозамкненим ротором, що містить блок силовий, що включає модуль силовий, зв'язаний з електродвигуном з n-ою кількістю статорних обмоток, при цьому в модулі силовому розміщена n-а кількість виконавчих органів і блок логіки, оснащений відповідною програмою керування електродвигуном з n-ою кількістю статорних обмоток, який відрізняється тим, що пристрій оснащений модулем...
Мікропроцесорна система керування тяговою передачею локомотива
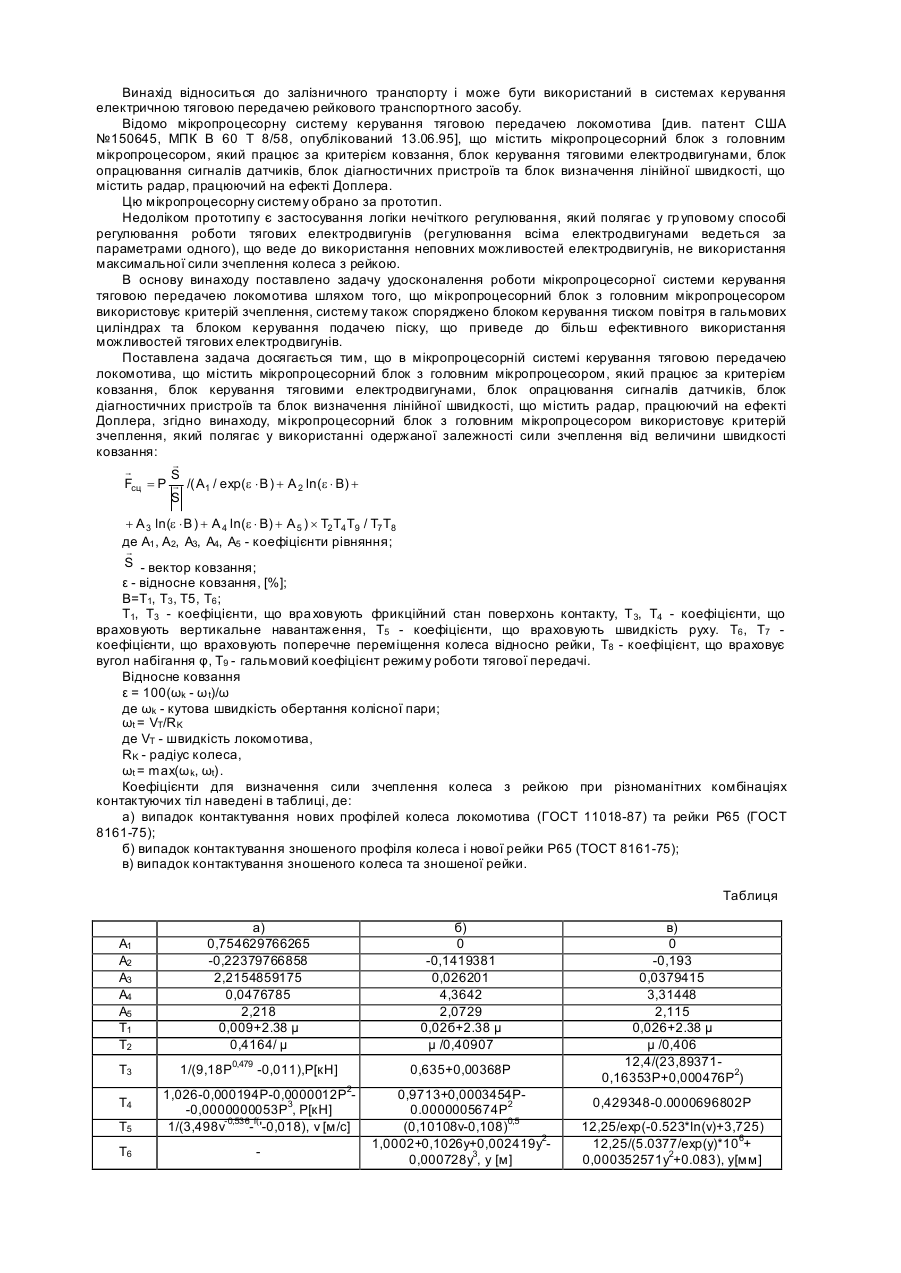
Номер патенту: 65187
Опубліковано: 15.03.2004
Автори: Белозьорова Вікторія Володимирівна, Горбунов Микола Іванович, Спірягін Максим Ігоревич, Поляченко Олена Юріївна, Спірягін Валентин Ігоревич, Кашура Олександр Леонідович, Вівденко Юрій Григорійович
МПК: B60T 8/58
Мітки: передачею, локомотива, керування, тяговою, система, мікропроцесорна
Формула / Реферат:
Мікропроцесорна система керування тяговою передачею локомотива, що містить мікропроцесорний блок з головним мікропроцесором, який працює за критерієм ковзання, блок керування тяговими електродвигунами, блок опрацювання сигналів датчиків, блок діагностичних пристроїв та блок визначення лінійної швидкості, що містить радар, працюючий на ефекті Доплера, яка відрізняється тим, що мікропроцесорний блок з головним мікропроцесором використовує...
Попередній патент: Спіральне свердло
Наступний патент: Спосіб стимуляції росту і регенерації сідничного нерва у щурів після його повного перетину у експерименті із діастазом (модифікація 4)
Випадковий патент: Пристрій для видачі рулонного паперу, що містить основу і щонайменше один перший футляр і один другий футляр, встановлені на основі пристрою для видачі