Привідний механізм регулювального стрижня для ядерного реактора
Формула / Реферат
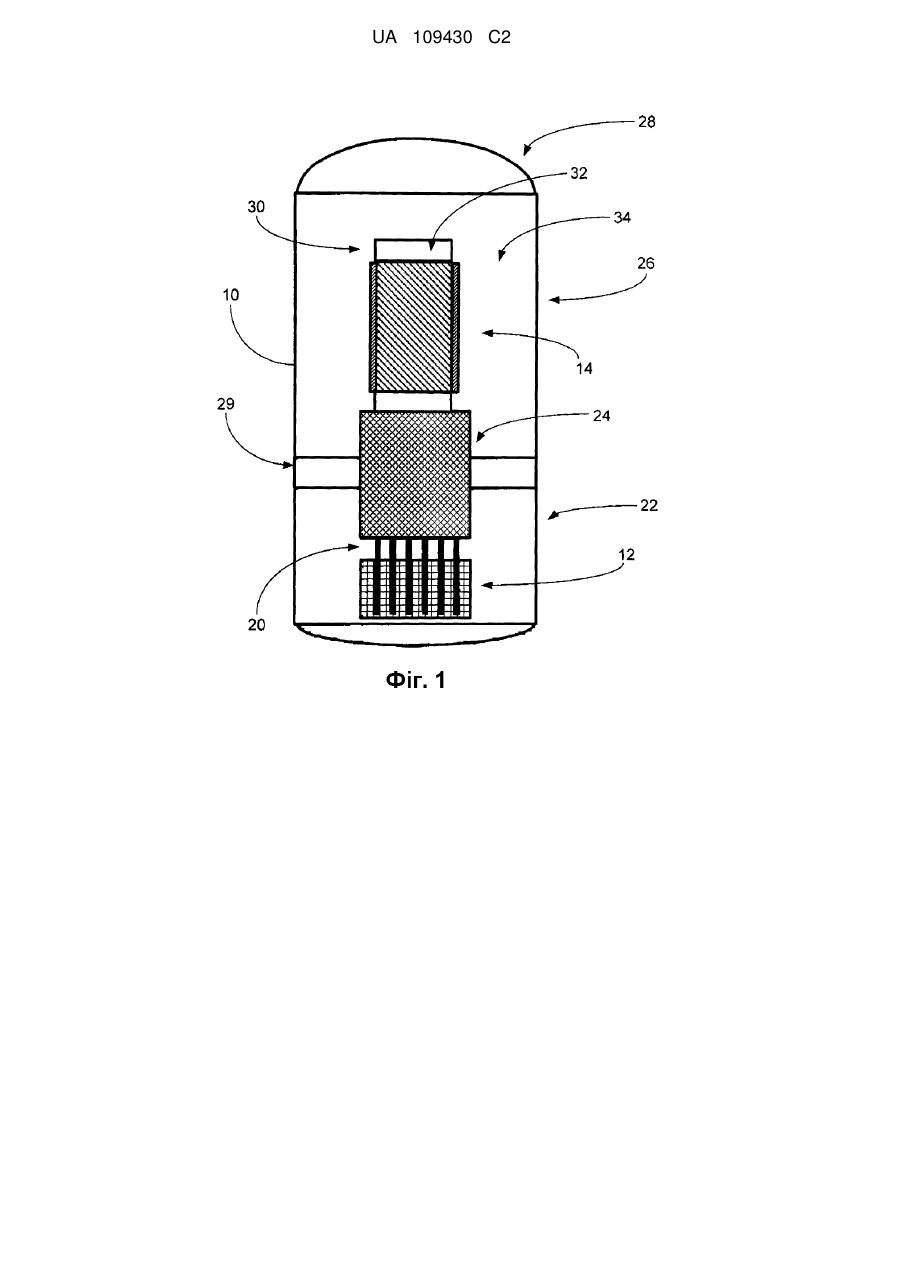
1. Механізм регулювального стрижня для використання у ядерному реакторі, при цьому механізм регулювального стрижня містить:
принаймні один регулювальний стрижень, який має конфігурацію для вставляння в активну зону реактора для поглинання нейтронів;
порожнистий ходовий гвинт;
двигун, який є оперативно з'єднаним з порожнистим ходовим гвинтом, щоб приводити у лінійний рух порожнистий ходовий гвинт у напрямку до активної зони реактора та назад від неї;
з'єднувальний стрижень, з'єднаний з принаймні одним регулювальним стрижнем та розташований частково усередині порожнистого ходового гвинта;
вузол фіксаторів, який має фіксатори, які, коли вони є замкненими, оперативно з'єднують з'єднувальний стрижень та ходовий гвинт, так що, коли фіксатори є замкненими, з'єднувальний стрижень та принаймні один регулювальний стрижень рухаються разом з ходовим гвинтом, коли ходовий гвинт приводиться у рух двигуном; та
механізм вивільнення, який має таку конфігурацію, щоб примушувати фіксатори вузла фіксаторів відкриватися у відповідь на умови аварійної зупинки, для того, щоб від'єднати з'єднувальний стрижень від ходового гвинта, так що з'єднувальний стрижень та принаймні один регулювальний стрижень падають, але при цьому ходовий гвинт залишається оперативно з'єднаним з двигуном та не падає.
2. Механізм регулювального стрижня за п. 1, де принаймні один регулювальний стрижень включає набір регулювальних стрижнів, з'єднаних зі з'єднувальним стрижнем за допомогою принаймні однієї хрестовини та поперечини.
3. Механізм регулювального стрижня за п. 1, де механізм вивільнення має гідравлічний привід та відкривається у відповідь на скидання гідравлічного тиску.
4. Механізм регулювального стрижня за п. 1, де вузол фіксаторів та ходовий гвинт закріплені разом, так що вузол фіксаторів, який містить фіксатори, рухається разом з ходовим гвинтом, коли двигун приводить у лінійний рух ходовий гвинт у напрямку до активної зони реактора або назад від неї.
5. Механізм регулювального стрижня за п. 4, де механізм вивільнення містить:
вузол підйомника;
подовжені елементи, які розташовані паралельно ходовому гвинту та мають таку конфігурацію, щоб їх підіймав вузол підйомника; та
механічне шарнірне з'єднання, яке має таку конфігурацію, щоб примушувати подовжені елементи входити у контакт з фіксаторами вузла фіксаторів та замикати їх при підйомі кулачкових засувів за допомогою вузла підйомника.
6. Механізм регулювального стрижня за п. 5, де подовжені елементи мають подовження, достатнє для того, щоб увійти у контакт з фіксаторами вузла фіксаторів та замкнути їх при будь-якому положенні ходового гвинта, яке можна отримати із використовуванням двигуна.
7. Механізм регулювального стрижня за п. 5, де механічне шарнірне з'єднання включає принаймні один шарнірний чотириланковий механізм.
8. Привідний механізм регулювального стрижня (CRDM), який містить:
ходовий гвинт;
двигун, з'єднаний за допомогою різьби з ходовим гвинтом для того, щоб приводити у лінійний рух ходовий гвинт у напрямку вставляння або у протилежному напрямку виймання;
вузол фіксаторів, прикріплений до ходового гвинта та маючий таку конфігурацію, щоб (і) зчіплюватися зі з'єднувальним стрижнем та (іі) відчіплюватися від з'єднувального стрижня, при цьому з'єднувальний стрижень вільно рухається у напрямку вставляння, коли він є відчепленим; та
механізм вивільнення, який має таку конфігурацію, щоб вибірково відчіплювати вузол фіксаторів від з'єднувального стрижня.
9. CRDM за п. 8, де ходовий гвинт є порожнистим, а частина з'єднувального стрижня розташована усередині порожнистого ходового гвинта.
10. CRDM за п. 9, де CRDM має таку конфігурацію, яка дозволяє вилучати з'єднувальний стрижень з CRDM внаслідок (і) роботи механізму вивільнення, завдяки чому вузол фіксаторів відчіплюється від з'єднувального стрижня, та (іі) виймання з'єднувального стрижня у напрямку виймання крізь CRDM.
11. CRDM за п. 10, де вузол фіксаторів є порожнистим, що дозволяє виймати з'єднувальний стрижень у напрямку виймання крізь вузол фіксаторів.
12. CRDM за п. 8, де механізм вивільнення являє собою гідравлічний механізм, який замикає вузол фіксаторів, коли подається тиск, та відкриває вузол фіксаторів, коли тиск скидається.
13. CRDM за п. 8, де механізм вивільнення містить:
подовжені елементи, розташовані паралельно ходовому гвинту; та
механічне шарнірне з'єднання, яке призначено для того, щоб примушувати подовжені елементи входити у контакт з вузлом фіксаторів та замикати його у відповідь на силу, що прикладається.
14. CRDM за п. 13, де механізм вивільнення далі містить:
механізм підйомника, який може вибірково функціонувати для надання сили, що прикладається.
15. CRDM за п. 14, де механізм підйомника вибраний з групи, що складається з (і) гідравлічного поршня та (іі) електричного соленоїда.
16. CRDM за п. 13, де механічне шарнірне з'єднання включає принаймні один шарнірний чотириланковий механізм.
17. CRDM за п. 8, який далі містить:
принаймні один вузол кулькової гайки, що утворює різьбове з'єднання між двигуном та ходовим гвинтом.
18. Привідний механізм регулювального стрижня (CRDM), який містить:
набір пристроїв CRDM, кожен з яких містить ходовий гвинт та двигун, який має таку конфігурацію, щоб приводити у рух ходовий гвинт; та
опору, на яку спирається набір пристроїв CRDM у корпусі ядерного реактора з двигунами прилеглих пристроїв CRDM, розташованими на різній висоті відносно активної зони реактора корпуса ядерного реактора;
де кожен пристрій CRDM з'єднаний з одним або декількома регулювальними стрижнями, так що двигун, що приводить у рух ходовий гвинт, рухає з'єднані один або декілька регулювальних стрижнів у напрямку до, назад від або усередині активної зони реактора.
19. CRDM за п. 18, де кожен пристрій CRDM далі містить:
вузол фіксаторів, який є скріпленим з ходовим гвинтом та який має таку конфігурацію, щоб замикати з'єднання з'єднувального стрижня та ходового гвинта; та
механізм вивільнення, який має таку конфігурацію, щоб відкривати вузол фіксаторів, щоб роз'єднати з'єднувальний стрижень та ходовий гвинт у відповідь на умови аварійної зупинки.
20. CRDM за п. 18, де ходовий гвинт та двигун кожного пристрою CRDM та опора - усі розташовані повністю усередині корпуса ядерного реактора.
21. Привідний механізм регулювального стрижня (CRDM), який містить:
ходовий гвинт;
вузол приводу, який має таку конфігурацію, щоб приводити у лінійний рух ходовий гвинт у напрямку вставляння або у протилежному напрямку виймання, при цьому вузол приводу містить двигун та принаймні одну незнімну кулькову гайку, з'єднану з ходовим гвинтом; та
вузол фіксаторів, з'єднаний з ходовим гвинтом та маючий (і) стан замкнення, при якому вузол фіксаторів замикає з'єднувальний стрижень, та (іі) стан розімкнення, при якому вузол фіксаторів не замикає з'єднувальний стрижень.
22. CRDM за п. 21, який далі містить:
механізм закриття фіксаторів, який можна оперативно використовувати для вибіркового замикання вузлом фіксаторів з'єднувального стрижня.
23. CRDM за п. 22, де механізм закриття фіксаторів містить один (і) гідравлічний поршень та (іі) електричний соленоїд.
24. CRDM за п. 22, де механізм закриття фіксаторів містить механічне шарнірне з'єднання, яке має довжину, паралельну ходовому гвинту, що є принаймні такою, яка дорівнює одному ходу вузла приводу.
25. CRDM за п. 24, де механічне шарнірне з'єднання включає шарнірний чотириланковий механізм.
26. Механізм регулювального стрижня для використання у ядерному реакторі, при цьому механізм регулювального стрижня містить:
принаймні один регулювальний стрижень;
з'єднувальний стрижень, з'єднаний з принаймні одним регулювальним стрижнем на нижньому кінці з'єднувального стрижня; та
привідний механізм регулювального стрижня (CRDM), який містить:
вузол фіксаторів, який має (і) стан замкнення, при якому вузол фіксаторів замикає верхній кінець з'єднувального стрижня, та (іі) стан розімкнення, при якому вузол фіксаторів не замикає верхній кінець з'єднувального стрижня; та
лінійний привідний механізм, який має таку конфігурацію, щоб приводити у лінійний рух вузол фіксаторів у напрямку до активної зони ядерного реактора або назад від неї.
27. Механізм регулювального стрижня за п. 26, де CRDM має таку конфігурацію, яка дозволяє вилучати з'єднувальний стрижень шляхом введення вузла фіксаторів у стан розімкнення та виймання з'єднувального стрижня з активної зони ядерного реактора крізь CRDM.
28. Механізм регулювального стрижня за п. 27, де CRDM є порожнистим, що дозволяє виймати з'єднувальний стрижень з активної зони ядерного реактора крізь CRDM.
Текст
Реферат: Привідний механізм регулювального стрижня (CRDM) містить ходовий гвинт, двигун, з'єднаний за допомогою різьби з ходовим гвинтом, для того, щоб приводити у лінійний рух ходовий гвинт у напрямку вставляння або у протилежному напрямку виймання, вузол фіксаторів, який є скріпленим з ходовим гвинтом та який має таку конфігурацію, щоб (і) зчіплюватися зі з'єднувальним стрижнем та (іі) відчіплюватися від з'єднувального стрижня, при цьому з'єднувальний стрижень вільно рухається у напрямку вставляння, коли він є відчепленим, та механізм вивільнення, який має таку конфігурацію, щоб вибірково відчіплювати вузол фіксаторів від з'єднувального стрижня. UA 109430 C2 (12) UA 109430 C2 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 Галузь та попередній рівень техніки У реакторі, що охолоджується водою під тиском (PWR), або іншому типі ядерного реактора для регулювання ядерної реакції використовуються рухомі регулювальні стрижні. Регулювальні стрижні включають матеріал, що поглинає нейтрони, та вони мають таку конструкцію, щоб їх можна було вставити в активну зону реактора. Зазвичай, чим далі регулювальні стрижні вставляються в активну зону, тим більше нейтронів поглинається, та тим більше уповільнюється швидкість ядерної реакції. Ретельний контроль глибини вставлення стрижнів та її точне вимірювання є корисним для точного регулювання реактивності. Привідний механізм регулювального стрижня (CRDM) дозволяє здійснювати це регулювання. Під час аварії регулювальні стрижні можна вставити повністю для того, щоб швидко припинити ядерну реакцію. При такому "аварійному зупиненні" корисно мати альтернативний швидкий механізм для вставляння регулювальних стрижнів. Крім того, або альтернативно, відомо, що існують спеціальні регулювальні стрижні, які або повністю вставляються (тим самим "вимикаючи" ядерну реакцію), або повністю виймаються (тим самим "вмикаючи" реактор). У таких системах стрижні, які здійснюють "вмикання/вимикання", іноді називаються "стопстрижнями", тоді як безперервно регульовані регулювальні стрижні іноді називаються "сірими стрижнями". Враховуючи вищезгадане, відомо, що побудовано привідний механізм регулювального стрижня (CRDM), в якому використовується ходовий гвинт, який входить в зчеплення зі знімним вузлом ролика-гайки. Під час нормального функціонування вузол ролика-гайки затискається на ходовому гвинті за допомогою примусової магнітної сили, яка діє проти витискувальних пружин. Внаслідок обертання ролика-гайки ходовий гвинт та, як слідство, і приєднані регулювальні стрижні можна рухати точно регульованим способом у напрямку до активної зони реактора або назад від неї. Під час аварійної зупинки електричний струм вимикається, внаслідок чого зникає магнітна сила, витискувальні пружини відкривають знімний ролик-гайку, та сірий стрижень, включаючи й ходовий гвинт, падає й швидко зупиняє реактор. Приклад такої конфігурації описано, наприклад, у роботі Domingo Ricardo Giorsetti, "Analysis of the Technological Differences Between Stationary & Maritime Nuclear Power Plants", M.S.N.E. Thesis, Massachusetts Institute of Technology (MIT) Department of Nuclear Engineering (1977), яку включено у повному обсязі до цього опису винаходу шляхом посилання. Що стосується суцільного реактора, який охолоджується водою під тиском (суцільний PWR), відомо, що CRDM кріпиться назовні та з'єднується з регулювальними стрижнями усередині силового корпуса за допомогою придатних наскрізних вводів. Для того, щоб зменшити виступ наскрізних вводів, було також запропоновано ввести CRDM усередину силового корпуса. Див., наприклад, роботу Ishizaka et al., "Development of a Built-in Type Control Rod Drive Mechanism (CRDM) For Advanced Marine Reactor X (MRX)", Proceedings of the International Conference on Design and Safety of Advanced Nuclear Power Reactors (ANP '92), October 25-29, 1992 (Токіо, Японія), опубліковану японською Спілкою з атомної енергії (Atomic Energy Society of Japan) в жовтні 1992 р., яку включено у її повному обсязі до цього опису винаходу шляхом посилання. Існуючі конструкції CRDM мають певні недоліки. Ці недоліки зростають, коли вибирається така конструкція внутрішнього CRDM, при якій складний електромеханічний CRDM є внутрішнім відносно середовища з високим тиском та високою температурою усередині силового корпуса. Розташування CRDM усередині силового корпуса також зумовлює проблеми, пов'язані зі складністю конструкції. Знімний ролик-гайка утворює складне з'єднання з ходовим гвинтом, що може шкідливо впливати на точність вставляння сірого стрижня під час звичайного функціонування. Повторне приєднання ролика-гайки до ходового гвинта може бути ускладненим, та його здійснення може не бути швидким, коли знов встановлюється контакт, що викликає виникнення позиційного зсуву після відновлення роботи після аварійної зупинки. Аварійна зупинка ходового гвинта також може спричиняти незворотне руйнування цілісності різьби або структури ходового гвинта. Крім того, зношення з часом може бути проблемою для складного знімного ролика-гайки. Інша проблема - це надійність. Оскільки аварійне зупинення за допомогою стрижня є вирішальним з точки зору безпеки, то він мусить працювати надійно навіть у випадку аварії з втратою теплоносія (LOCA) або в іншому аварійному режимі, який може включати вимкнення електроенергії, великі зміни тиску тощо. Датчик положення регулювального стрижня є також зазвичай складним пристроєм. У деяких системах використовується зовнішній датчик положення, для якого необхідні наскрізні з'єднання крізь стінку силового корпуса. Для внутрішнього CRDM реактора MRX було розроблено складний датчик положення, у якому трансдуктор генерує імпульс деформації скручування, який проходить крізь магніторезистивний хвилевід, та вимірюються взаємодії у магнітному полі для 1 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 того, щоб визначити положення стрижня. Зазвичай внутрішній датчик положення, який працює на основі електричного опору, схильний до помилок, які зумовлюються змінами опору матеріалів, викликаними впливом температури. Суть винаходу В одному аспекті розкриття винаходу механізм регулювального стрижня для використання у ядерному реакторі містить принаймні один регулювальний стрижень, який має конфігурацію для вставляння в активну зону реактора для поглинання нейтронів; порожнистий ходовий гвинт; двигун, оперативно з'єднаний з порожнистим ходовим гвинтом, щоб приводити у лінійний рух порожнистий ходовий гвинт у напрямку до активної зони реактора або назад від неї; з'єднувальний стрижень, з'єднаний з вищезгаданим принаймні одним регулювальним стрижнем та розташований частково усередині порожнистого ходового гвинта; вузол фіксаторів, який має фіксатори, які, коли вони є замкненими, оперативно з'єднують з'єднувальний стрижень та ходовий гвинт, так що, коли фіксатори є замкненими, з'єднувальний стрижень та вищезгаданий принаймні один регулювальний стрижень рухаються разом з ходовим гвинтом, коли ходовий гвинт приводиться у рух двигуном; та механізм вивільнення, який має таку конфігурацію, щоб примушувати фіксатори вузла фіксаторів відкриватися у відповідь на умови аварійної зупинки, для того щоб від'єднати з'єднувальний стрижень від ходового гвинта, так що з'єднувальний стрижень та вищезгаданий принаймні один регулювальний стрижень падають, але при цьому ходовий гвинт залишається оперативно з'єднаним з двигуном та не падає. В іншому аспекті розкриття винаходу привідний механізм регулювального стрижня (CRDM) містить ходовий гвинт; двигун, з'єднаний за допомогою різьби з ходовим гвинтом для того, щоб приводити у лінійний рух ходовий гвинт у напрямку вставляння або у протилежному напрямку виймання; вузол фіксаторів, прикріплений до ходового гвинта та маючий таку конфігурацію, щоб (і) зчіплюватися зі з'єднувальним стрижнем та (іі) відчіплюватися від з'єднувального стрижня, при цьому з'єднувальний стрижень вільно рухається у напрямку вставляння, коли він є відчепленим; та механізм вивільнення, який має таку конфігурацію, щоб вибірково відчіплювати вузол фіксаторів від з'єднувального стрижня. В іншому аспекті розкриття винаходу привідний механізм регулювального стрижня (CRDM) містить набір пристроїв CRDM, кожен з яких містить ходовий гвинт та двигун, який має таку конфігурацію, щоб приводити у рух ходовий гвинт; та опору, на яку спирається набір пристроїв CRDM у корпусі ядерного реактора з двигунами прилеглих пристроїв CRDM, розташованими на різній висоті відносно активної зони реактора корпуса ядерного реактора. Кожен пристрій CRDM з'єднаний з одним або декількома регулювальними стрижнями, так що двигун, що приводить у рух ходовий гвинт, рухає з'єднані один або декілька регулювальних стрижнів у напрямку до, назад від або усередині активної зони реактора. В іншому аспекті розкриття винаходу привідний механізм регулювального стрижня (CRDM) містить ходовий гвинт; вузол приводу, який має таку конфігурацію, щоб приводити у лінійний рух ходовий гвинт у напрямку вставляння або у протилежному напрямку виймання, при цьому вузол приводу містить двигун та принаймні одну незнімну кулькову гайку, з'єднану з ходовим гвинтом; та вузол фіксаторів, з'єднаний з ходовим гвинтом та маючий (і) стан замкнення, при якому вузол фіксаторів замикає з'єднувальний стрижень, та (іі) стан розімкнення, при якому вузол фіксаторів не замикає з'єднувальний стрижень. В одному аспекті розкриття винаходу механізм регулювального стрижня для використання у ядерному реакторі містить принаймні один регулювальний стрижень; з'єднувальний стрижень, з'єднаний з вищезгаданим принаймні одним регулювальним стрижнем на нижньому кінці з'єднувального стрижня; та привідний механізм регулювального стрижня (CRDM), який містить вузол фіксаторів, який має (і) стан замкнення, при якому вузол фіксаторів замикає верхній кінець з'єднувального стрижня, та (іі) стан розімкнення, при якому вузол фіксаторів не замикає верхній кінець з'єднувального стрижня; та лінійний привідний механізм, який має таку конфігурацію, щоб приводити у лінійний рух вузол фіксаторів у напрямку до активної зони ядерного реактора або назад від неї. В іншому аспекті розкриття винаходу у механізмі регулювального стрижня, який описано безпосередньо у попередньому абзаці, CRDM має таку конфігурацію, яка дозволяє вилучати з'єднувальний стрижень шляхом введення вузла фіксаторів у стан розімкнення та виймання з'єднувального стрижня з активної зони ядерного реактора крізь CRDM. Стислий опис ілюстративного матеріалу Винахід може набувати форму у різних компонентах та конфігураціях компонентів, та у різних технологічних процесах та конфігураціях технологічних процесів. Ілюстративний матеріал призначено тільки для ілюстрування переважних варіантів здійснення, та його не слід розглядати як такий, що обмежує цей винахід. 2 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фігура 1 - це схема, на якій зображено, як ілюстрацію, корпус ядерного реактора того типу, що охолоджується водою під тиском (PWR). Фігура 2 - це схема, на якій зображено внутрішні пристрої верхньої секції проілюстрованого корпуса ядерного реактора з Фігури 1. Фігури 3-5 - це схеми, на яких зображено аспекти системи швидкого опускання регулювального стрижня, в якій використовується гідравлічний підйомник. Фігури 6-15 - це схеми, на яких зображено аспекти системи регулювального стрижня з функціонуванням сірого стрижня з використанням електромагніту та системи магнітного фіксатора для функціонування при аварійній зупинці. Фігури 16-21 - це схеми, на яких зображено аспекти системи регулювального стрижня з функціонуванням сірого стрижня з використанням електромагніту та системи фіксаторів, що приводиться у дію гідравлічним підйомником при аварійній зупинці. Фігури 22 та 23 демонструють перспективний або частково перспективний вид у розрізі, відповідно, придатної розстановки CRDM, при якій застосовується східчастий вертикальний порядок розташування двигунів. Фігури 24 та 25 демонструють перспективний вид та перспективне зображення у розібраному вигляді, відповідно, з'єднання нижнього кінця з'єднувального стрижня з вузлом стрижневої збірки з використанням канавки у формі літери "J". Докладний опис переважних варіантів здійснення Звернемося до Фігури 1, на якій схематично зображено ілюстрацію корпуса ядерного реактора того типу, що охолоджується водою під тиском (PWR). Зображений первинний корпус 10 містить активну зону 12, внутрішні спіральні парогенератори 14 та внутрішні регулювальні стрижні 20. Проілюстрований корпус реактора містить чотири основні компоненти, а саме: 1) нижній корпус 22, 2) верхні внутрішні компоненти 24, 3) верхній корпус 26 та 4) кришку 28 верхнього корпуса. Середній фланець 29 знаходиться між відсіком нижнього корпуса 22 та відсіком верхнього корпуса 26. Передбачаються також інші конфігурації корпуса. Зверніть увагу на те, що Фігура 1 - це схема, та вона не містить подробиць, таких як проходки у силовому корпусі для потоку вторинного теплоносія усередину або назовні парогенераторів, електричні проходки для електричних складових тощо. Нижній корпус 22 проілюстрованого корпуса 10 реактора з Фігури 1 містить активну зону 12, яка може мати по суті будь-яку придатну конфігурацію. Одна придатна конфігурація включає попередню структуру активної зони з нержавіючої сталі, яка містить паливні зборки, і є замінною для того, щоб поповнити запас палива реактора, та яка спирається на нижній корпус. Проілюстрований верхній корпус 26 вміщує парогенератори 14 для цього прикладу PWR, який має конструкцію з внутрішніми парогенераторами (іноді позначається як PWR з суцільною конструкцією). На Фігурі 1 парогенератор 14 зображено схематично. Циліндрична внутрішня оболонка або кожух 30 верхнього потоку відокремлює ділянку 32 центральної колони від кільцеподібної зони 34 відводу, де розташовані спіральні парогенератори 14. Проілюстрований парогенератор 14 має конструкцію спіральної котушки, проте передбачаються й інші конструкції. Первинний теплоносій реактора протікає ззовні труб парогенератора 14, а вторинний теплоносій протікає усередині труб парогенератора 14. У звичайній конфігурації циркуляції первинний теплоносій нагрівається активною зоною 12 та підіймається угору через зону 32 центральної колони з наступним виходом зверху кожуха 30, після чого первинний теплоносій повертається назад униз через зону 34 відводу та крізь парогенератори 14. Такий потік первинного теплоносія може рухатися внаслідок природної конвекції, за допомогою внутрішніх або зовнішніх насосів для первинного теплоносія (не зображено) або внаслідок застосування комбінації природної конвекції з допоміжними насосами. Хоча було проілюстровано PWR з суцільною конструкцією, також передбачається, що корпус реактора повинен мати зовнішній парогенератор (не зображено), у разі чого проходки у силовому корпусі дозволять переміщувати первинний теплоносій до зовнішнього парогенератора та від нього. Проілюстрована кришка 28 верхнього корпуса - це окремий компонент. Також передбачається, що кришка корпуса буде суцільною з верхнім корпусом 26, у випадку чого парогенератор 14 та верхній кожух 30 необов'язково підтримуються підвісками на внутрішній частині кришки корпуса. Проілюстрований варіант здійснення - це суцільний PWR, який характеризується тим, що він включає внутрішні парогенератори 14, які зазвичай можуть мати різні геометричні конфігурації, такі як спіралеподібні, вертикальні, нахилені тощо. З метою резервування зазвичай переважно мати більш ніж один парогенератор, трубки або труби якого зазвичай чергуються усередині зони 34 відводу, щоб сприяти тепловій однорідності; проте, передбачається включити тільки єдиний парогенератор. Незважаючи на те, що проілюстровані парогенератори 14 зображено як такі, що розташовані поруч з кожухом 30 або обгортають його, зазвичай парогенератори можуть 3 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 заповнювати суттєвий об'єм зони 34 відводу, а у деяких варіантах здійснення парогенератори можуть суттєво заповнювати кільцеподібний об'єм між зовнішньою поверхнею кожуха 30 та внутрішньою поверхнею силового корпуса 10. Також передбачається, що внутрішні парогенератори або їх частини будуть розташовуватися повністю або частково у зоні 32 центральної колони, над кожухом 30 або будь-де усередині силового корпуса 10. З іншого боку, у деяких варіантах здійснення PWR може не бути суцільним PWR, тобто у деяких варіантах здійснення проілюстровані внутрішні парогенератори можна не включати за рахунок одного або більше зовнішніх парогенераторів. Крім того, проілюстрований PWR - це приклад, а в інших варіантах здійснення можна використовувати ядерний реактор з киплячою водою (BWR) або інші конструкції реакторів, які мають внутрішні або зовнішні парогенератори. Звернемося до Фігури 2, на якій детальніше зображено відсік 24 верхніх внутрішніх компонентів. В проілюстрованій конструкції відсік 24 верхніх внутрішніх компонентів є опорою для привідних механізмів регулювальних стрижнів, або привідних механізмів 40, 42, та напрямних рамок 44 регулювальних стрижнів, та він також є структурою, крізь яку проходять електроенергія для приводу регулювальних стрижнів та сигнали контрольної апаратури. Це дозволяє вилучати верхній корпус 26 та суцільний парогенератор 14 незалежно від приводів регулювальних стрижнів та пов'язаною структурою. Проте, передбачається більш інтегрована конструкція, така, де використовується загальний відсік як для опори CRDM, так і для опори суцільного парогенератора. Звернемо особливу увагу на ілюстрацію варіанта здійснення за Фігурою 2, де конструкція 24 верхніх внутрішніх компонентів включає кошик 46 для верхніх внутрішніх компонентів, опорну конструкцію 48 для CRDM, напрямні рамки 44 регулювальних стрижнів та, власне, привідні механізми 40, 42 регулювальних стрижнів. Кошик 46 для верхніх внутрішніх компонентів є придатною зварною конструкцією, яка включає середній фланець 29 та опорну конструкцію для напрямних рамок 44 регулювальних стрижнів. В одному придатному варіанті здійснення напрямні рамки 44 регулювальних стрижнів - це окремі зварні конструкції з нержавіючої сталі 304L, скріплені болтами на місці, середній фланець 29 - це кована конструкція з вуглецевої сталі SA508 Gr 4N Cl 2, та решта конструкції виготовлена з нержавіючої сталі 304L. Опорна конструкція 48 для CRDM містить опорні елементи решітки для приводів 40, 42 регулювальних стрижнів та напрямну конструкцію для приладдя, що знаходиться в активній зоні. Для виготовлення усього вищезгаданого придатною є нержавіюча сталь 304L. Опорна конструкція 48 для CRDM кріпиться болтами до кошика 46 для верхніх внутрішніх компонентів. Усе це є лише ілюстративними матеріалами та конструкціями, та також передбачаються інші конфігурації та/або сумісні з реактором матеріали. В ілюстративному прикладі за Фігурою 2 застосовуються два типи приводів 40, 42 регулювальних стрижнів: гідравлічний тип приводу 42 регулювального стрижня, який керує стопстрижнями, які або повністю вийняті, або повністю вставлені в активну зону; та електричний тип приводу 40 регулювального стрижня, який керує роботою сірих стрижнів, які вставляються на різні глибини протягом життя активної зони для регулювання швидкості ядерної реакції під час звичайного режиму роботи реактора. Сірі стрижні також мають конфігурацію для аварійної зупинки, тобто, їх можна швидко вставити в активну зону 12 під час певних аварійних умов. В інших варіантах здійснення передбачається зовсім не використовувати стоп-стрижні, у випадку чого сірі стрижні також спричиняють припинення функціонування. Звернемося далі до Фігури 2 та до Фігур 3-5, на яких проілюстровано аспекти стоп-стрижнів. Стоп-стрижні придатним чином розташовані групами, закріпленими на хрестовинах або їм подібному, які усі функціонують в єдиному блоці та які усі пересуваються за допомогою єдиного приводу 42 стоп-стрижнів. На Фігурах 3-5 зображено лише єдиний привід 42 стоп-стрижнів, проте не зображено хрестовини та окремі стоп-стрижні. Про цю конфігурацію відомо, що стопстрижні використовуються у бінарному режимі "включення/виключення", та вони або усі повністю вставляються в активну зону 12 для припинення реакції, або усі повністю виймаються з активної зони 12 для нормального функціонування реактора. Звернемо особливу увагу на Фігуру 3, де привід 42 стоп-стрижнів містить циліндричний корпус 50, кришку 52 циліндра, основну плиту 54 циліндра та з'єднувальний стрижень 56, за допомогою якого здійснюється з'єднання з решіткою стоп-стрижнів (не зображено). Приклад приводу 42 стоп-стрижнів з Фігур 3-5 - це гідравлічний привід, в якому використовується очищена зворотна рідина запасів теплоносія реактора від нагнітальних насосів високого тиску при температурі приблизно 500 °F (260 °C) та тиску 1600 psi (11,03 МПа), для того, щоб утримувати блок стоп-стрижнів поза активною зоною 12. Звернемо особливу увагу на Фігуру 4, на якій зображено вигляд у розрізі ділянки поршня зі стрижнем у позиції, коли його вийнято. У збільшеній частині Фігури 4 зображено дренажний 4 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 отвір 60 кришки 52 циліндра разом з підйомним поршнем 62, кільцями 64 поршня (які у деяких варіантах здійснення є металевими), буфером 66 аварійної зупинки та верхньою пружиною 68 буфера. Позиція, коли стрижні вийняті, зображена на Фігурі 4, відповідає тому, що циліндр приводу 42 стоп-стрижнів знаходиться під тиском. Звернемо особливу увагу на Фігуру 5, на якій зображено вигляд у розрізі ділянки поршня зі стрижнем, який знаходиться у позиції, коли його вставлено. Збільшена частина Фігури 5 демонструє підйомний поршень 62, кільця 64 поршня, буфер 66 аварійної зупинки, або поршень буфера 66 аварійної зупинки, напрямну втулку 70 стрижня та кільця 72 ущільнення стрижня (які у деяких варіантах здійснення є металевими). На збільшеній частині фігури видно, що основна плита 54 циліндра має отвір для тиску, або вхідний отвір 74. Позиція, коли стрижні вставлені, зображена на Фігурі 5, відповідає тому, що циліндр приводу 42 стоп-стрижня не знаходиться під тиском. У деяких варіантах здійснення теплоносій може протікати поза ущільненням 64 поршня та ущільненням 72 вала, та він стає частиною запасу, що повертається до корпуса 10 реактора. Циліндр приводу 42 стоп-стрижнів кріпиться над активною зоною 12. Гідравлічна лінія (не зображено) для активації циліндра 42 проходить крізь фланець 29, а лінії апаратури проходять через герметичний трубопровід до звичайних з'єднань, які також довільно використовуються для приводів 40 сірих стрижнів. Стрижні, які виступають та з'єднують хрестовини регулювальних стрижнів з решіткою стоп-стрижнів, також довільно входять до конфігурації, так що вони будуть ковзати крізь решітку так, що єдина група, яка застряла, не завадить опусканню інших груп регулювальних стрижнів. Крім того, стрижні, що виступають, мають таку конструкцію, щоб вони від'єднувалися від хрестовини регулювального стрижня, так щоб стоп-стрижні залишалися в активній зоні, коли верхні внутрішні компоненти 24 вийняті. Від'єднання та повторне приєднання виконується із застосуванням дистанційного приладдя під час операцій поповнення палива. Під час нормальної роботи реактора стоп-стрижні повністю виймаються з активної зони (тобто, знаходяться у позиції відведення) внаслідок подачі тиску в гідравлічні циліндри 42 стопстрижнів. Наприклад, в одному придатному варіанті здійснення очищена зворотна рідина запасів теплоносія від нагнітальних насосів високого тиску подається при 500 °F (260 °C) та при тиску 1600 psi (11,03 МПа) під циліндричний підйомний поршень 62 через вхідний отвір 74 основної плити 54 циліндра. У цьому прикладі рідина, що є присутньою у циліндрі 50 над поршнем 62, постачається з корпуса 10 реактора крізь дренажний отвір 60 у кришці циліндра та, при умовах корпуса реактора 600°(F) (315 °C) та 1500 psi (10,34 МПа), внаслідок чого на усьому поршні 62 утворюється перепад корисного тиску у 100 psi (689,5 кПа). Розмір поршня вибирається так, щоб перепад тиску, який утворюється, був достатнім для підтримки певного навантаження від стоп-стрижнів та підтримуючих хрестовин та інших пов'язаних компонентів та повністю підіймав блок стоп-стрижнів за один хід циліндра до верхньої зупинки поршня 62. У випадку аварійної зупинки корпуса, що знаходиться під тиском, блок стоп-стрижнів різко вивільняється внаслідок припинення постачання теплоносія під тиском до нижньої сторони підйомного поршня 62 та дренажування лінії постачання до атмосферного тиску. У вищезгаданому прикладі очікується, що тиск корпуса на верхній поверхні підйомного поршня 62 утворює початковий перепад тиску 1500 psi (10,34 МПа) на усьому поршні підйомника, який діє разом з впливом сили тяжіння, штовхаючи рушійний вузол (включаючи підйомний поршень 62, буферний поршень 66 аварійної зупинки, верхню пружину 68, з'єднувальний стрижень 56 та решітку стоп-стрижнів (не зображено) униз до позиції повного вставлення, як показано на Фігурі 5. Під час спуску рушійного вузла сила буферної верхньої пружини 68 утримує буферний поршень 66 за межами розточки підйомного поршня 62, зберігаючи наповнену рідиною буферну порожнину між двома поршнями 62, 66. Коли нижня поверхня буферного поршня 66 ударяє по закріпленій основній плиті 54 вузла циліндра, тоді внаслідок пересування підйомного поршня 62, яке триває, захоплена рідина випускається крізь регульовані дроселі для потоку, внаслідок чого кінетична енергія рушійного вузла розсіюється. Крім того, кінетична енергія розсіюється завдяки пружній деформації компонентів рушійного вузла, особливо через довгий, відносно тонкий з'єднувальний стрижень 56. Передбачаються також інші механізми розсіювання кінетичної енергії. Коли рідина випускається з порожнини, тоді підйомний поршень 62 ударяє по буферному поршню 66, внаслідок чого рушійний вузол зупиняється. Продовжуємо звернення до Фігур 1 та 2 та далі звертаємося до Фігур 6-14, де описано приклад варіанта здійснення сірих стрижнів та пов'язаних привідних механізмів 40. Як видно на Фігурі 6, в проілюстрованому варіанті здійснення існує дві різні конфігурації сірих стрижнів (тип 1 та тип 2). Сірі стрижні 80 розташовуються як групи сірих стрижнів, які, у свою чергу, зчеплені хрестовинами разом у дві або чотири групи та з'єднані з'єднувальними стрижнями 82, як показано на Фігурі 6. Конфігурація за типом 1 також містить противагу 84 на місці однієї одиниці 5 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 з'єднувального стрижня/групи. Детальніше, поперечина 86 з'єднує два з'єднувальні стрижні 82 та противагу 84, утворюючи конфігурацію за типом 1. Поперечина 88 з'єднує три з'єднувальні стрижні 82, утворюючи конфігурацію за типом 2. Приводи 40 сірих стрижнів кріпляться над активною зоною 12. Фігура 7 демонструє стільниковий вигляд позицій розташування приводів 40 сірих стрижнів та підйомного циліндра 50 стоп-стрижнів, відповідно до опорної конструкції 48 для CRDM. Підйомний циліндр 50 стоп-стрижнів розташовується по центру. Чотири зовнішні приводи 40 сірих стрижнів, кожен з яких рухає дві конфігурації за типом 1, включаючи поперечини 86, рухаються одночасно. Два внутрішні приводи 40, кожен з яких рухає чотири конфігурації стрижнів за типом 2, включаючи поперечини 88, рухаються одночасно. Ці різні набори приводів 40 довільно рухаються разом або незалежно. Електричні та сигнальні з'єднання придатним чином спрямовуються крізь герметичний трубопровід або вбудований в активну зону провідник 90 для пристроїв до з'єднань на середньому фланці 29 (на Фігурі 7 не зображено). Як і у випадку зі стоп-стрижнями, стрижні, які виступають та з'єднують хрестовини регулювальних стрижнів з решіткою стрижнів, довільно сконструйовано так, що вони будуть ковзати крізь решітку так, що єдина зчеплена група не буде заважати опусканню інших наборів регулювальних стрижнів. Крім того, стрижні, що виступають, довільно мають таку конструкцію, щоб вони могли від'єднатися від хрестовини регулювальних стрижнів, так щоб сірі стрижні могли б залишитися в активній зоні, коли верхні внутрішні компоненти виймаються або вже вийняті у той час, коли верхні внутрішні компоненти знаходяться на їхній опірній стійці. Два придатних види конструкції для регулювального механізму сірих стрижнів включають тип "магнітний підйомний важіль" та тип "ходовий гвинт". З цих двох типів очікується, що тип "ходовий гвинт" здійснює більш точне регулювання положення груп сірих стрижнів та, отже, проілюстрований варіант здійснення застосовує регулювальний механізм типу "ходовий гвинт". Звернемося до Фігури 8, на якій в одному проілюстрованому варіанті здійснення регулювальний механізм 40 сірих стрижнів застосовує підйомний стрижень у конфігурації кулькової гайки. Фігура 8 демонструє як стан повної вставки (креслення ліворуч), так і стан повного вилучення (креслення праворуч). Креслення Фігури 8 демонструють поперечину 88 конфігурації типу 2; для конфігурації типу 1 поперечину 88 замінюють поперечиною 86. У варіанті здійснення, зображеному на Фігурі 8, нижній вузол 100 упору/буферу кріпиться на опору реактора 101, необов'язково з опорою для вузла електромагнітної котушки на відстані. Нижня та верхня опорні труби 102, 104, які кріпляться до верхівки нижнього упору 100, задають напрямок для вузла ходового гвинта / перетворювача обертання. Вузол 106 кулькової гайки/двигуна кріпиться на верхівці верхньої опорної трубки 104, а вузол 108 електромагнітної котушки кріпиться до верхівки двигуна. Усередині вузла 108 електромагнітної котушки знаходиться фіксуючий вузол 110 підйомного стрижня - ходового гвинта, який, коли його закрито, підтримує вузол 112 підйомного/з'єднувального стрижня (який виступає у стані вставляння, як видно на кресленні ліворуч). Вузол індикатора положення кріпиться на опорних трубках 102, 104 між вузлом 106 кулькової гайки/двигуна та вузлом нижнього упору 100. У деяких варіантах здійснення індикатор положення - це струнний потенціометр, придатним чином закріплений нижче фіксуючого вузла 110, проте передбачаються інші позиції закріплення. Проілюстрований струнний потенціометр містить натяжну котушку 120, закріплену на опорній трубці 102, та "струну" або кабель, або їм подібне, 122, що має кінець, приєднаний до вузла 112 підйомного/з'єднувального стрижня, так що струна або кабель 122 витягується з котушки 120 проти сили натягу, коли вузол 112 підйомного/з'єднувального стрижня (та, як слідство, приєднаних груп сірих стрижнів) рухається у напрямку до активної зони 12 (на Фігурі 8 не показано). Коли рух є зворотним, тоді сила натягу у натяжній котушці 120 примушує струну або кабель 122 намотуватися назад на котушку 120. Обертовий датчик 124 вимірює обертання натяжної котушки 120, застосовуючи кодувальний датчик, який рахує прохід перевіряльних маркерів або інших показників обертання. Закріплення струнного потенціометра може бути іншим від проілюстрованого, доки натяжна котушка 120 кріпиться на позиції, яка не рухається з сірими стрижнями, а струна або кабель 122 є зафіксованими, щоб рухатися разом з сірими стрижнями. Також передбачається поєднати обертовий датчик 124 з натяжною котушкою 120. Струнний потенціометр подає електричний вихідний сигнал, що відповідає положенню з'єднувального стрижня або іншого елемента 112, який рухається з сірим регулювальним стрижнем, тим самим надаючи інформацію про положення сірих регулювальних стрижнів усередині активної зони 12. Електричний сигнал індикації положення передається назовні корпуса 10 реактора через електричні наскрізні з'єднання (не показано), які можуть бути зроблені малими та/або інтегрованими з іншими електричними наскрізними з'єднаннями. Пристрій індикатора положення має конфігурацію та 6 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 калібрування для роботи при температурі та рівні радіації у корпусі реактора. Звернемося далі до Фігури 8 та до Фігур 9-14, на яких проілюстрований варіант здійснення рушійного вузла CRDM 40 сірих стрижнів містить три елементи: вузол ходового гвинта/перетворювача обертання; вузол підйомного/з'єднувального стрижня та фіксуючу систему, яка є оперативно з'єднаною з підйомним стрижнем за допомогою ходового гвинта. Фігура 9 демонструє вузол ходового гвинта/перетворювача обертання в аксонометрії (ліворуч) та у розрізі (праворуч). Вузол двигуна включає корпус 130 статора, який містить статор 132 та ротор 134. Верхня кінцева плита 136 статора та радіальний підшипник 138 з регульованою шайбою 140 складають верхню частину вузла двигуна, у той час коли нижній корпус 142 та опорно-упорний підшипник 144 складають нижню частину вузла двигуна. Нижній вузол 150 кулькової гайки, розташований усередині нижнього корпуса 142, є нагвинченим на ротор 134, та верхній вузол 152 кулькової гайки є також нагвинченим на ротор 134. Обидва вузли 150, 152 кулькових гайок є зчепленими за допомогою різьби з ходовим гвинтом 160 (на Фігурі 9 зображено частково). Фігура 9, крім того, демонструє частини підйомного стрижня 112 та верхньої опорної трубки 104. Звернемося до Фігури 10, на якій проілюстровано фіксуючу систему, яка включає фіксуючий вузол 110 підйомного стрижня з ходовим гвинтом та частину вузла 108 електромагнітної котушки. На Фігурі 10 також зображено кінець 111 підйомного стрижня 112 та ближній кінець ходового гвинта 160, який закінчується біля фіксуючого вузла 110 або в ньому. Фіксатори 170 безпосередньо з'єднують верхній кінець 111 підйомного стрижня 112 з ходовим гвинтом 160 для здійснення нормальної роботи та від'єднують підйомний стрижень 112 під час аварійної зупинки (дивись Фігуру 11). Нижній кінець підйомного стрижня 112 пригвинчується до верхівки з'єднувального стрижня 82 (довільно за допомогою проміжної поперечини 86 або проміжної поперечини 88), тим самим утворюючи безперервний вузол підйомного стрижня/з'єднувального стрижня. Низ з'єднувального стрижня 82 зчіплюється безпосередньо з хрестовинами регулювальних стрижнів, тим самим приєднуючи регулювальні стрижні до механізму. Довільно, магніт 113 розташований поблизу верхівки 111 підйомного стрижня 112, щоб надавати магнітний сигнал для магнітного індикатора положення (дивись Фігуру 21). На Фігурі 10 також зображено частину двигуна, яка містить частини корпуса 130 двигуна, статора 132 та ротора 134, які повністю зображені на Фігурі 9. Фіксатори 170 розташовані у корпусі 172 фіксаторів, який має напрямну для запірної пружини 174. Додаткові компоненти проілюстрованого варіанта здійснення фіксуючої системи включають електромагнітний кожух 176, який містить електромагніти 177, які утворюють стовп з електромагнітних котушок, та постійні магніти 178 на фіксаторах 170. Ходовий гвинт 160 вгвинчено в основу 179 фіксуючої системи корпуса 172 фіксаторів. Фіксатори 170 влаштовано так, щоб вони оберталися навколо обертових позицій 180 для надійної аварійної зупинки під час завантаження стрижнів униз. У цьому варіанті здійснення ходовий гвинт 160 безперервно підтримується вузлом двигунакулькової гайки (краще видно на Фігурі 9), який дозволяє здійснювати дуже точне регулювання положення ходового гвинта та, як слідство, дуже точне регулювання положення вузла регулювальних стрижнів. У проілюстрованому варіанті здійснення двигун (наприклад, статор 132, ротор 134) - це синхронний двигун, у якому ротор 134 - це постійний магніт. Перевага цієї конструкції полягає у компактності та простоті; проте, передбачаються також інші конфігурації двигуна. Ходовий гвинт 160 не падає. Навпаки, під час аварійної зупинки верхній кінець підйомного стрижня 112 вузла підйомного стрижня/з'єднувального стрижня від'єднується від ходового гвинта 160 за допомогою активованої магнітом фіксуючої системи (дивись Фігуру 11). Коли електромагніти 177 відмикаються від електроенергії, тоді надійна фіксуюча система вивільняє вузол підйомного стрижня/з'єднувального стрижня (та, як слідство, вузол регулювального стрижня) від ходового гвинта 160, тим самим розпочинаючи аварійну зупинку. Систему нижнього упора та буфера (не зображено, проте придатним чином є подібною до системи нижнього упора та буфера проілюстрованих стоп-стрижнів, описаних у цьому описі з посиланням на Фігури 4 та 5) включено у вузол основи/буфера для того, щоб розсіяти кінетичну енергію в кінці удару при аварійній зупинці та задати висоту підйому днища стрижня. Перетворювач обертання (не зображено) приєднано до ходового гвинта 160, щоб реагувати на обертання двигуна, тим самим забезпечуючи пересування вузла ходового гвинта/регулювального стрижня. Звичайний стан, тобто стан до аварійної зупинки, зображено на Фігурах 9 та 10. Фігура 9 демонструє вузол кулькової гайки двигуна, та Фігура 10 демонструє фіксуючу систему, що використовується для нормальної роботи. Як видно на Фігурі 10, постійні магніти 178 на 7 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 фіксаторах 170 за допомогою магнітної сили притягуються до електромагнітів 177 електроенергією, тим самим обертаючи фіксатори 170 навколо обертових позицій 180 та здійснюючи зчеплення фіксаторів 170 з відповідною ділянкою підйомного стрижня 112. Отже, фіксатори 170 фіксують підйомний стрижень 112 у нормальному стані, зображеному на Фігурі 10. Крім того, основа 179 фіксуючої системи має різьбу або іншим способом з'єднана з ходовим гвинтом 160. Отже, у нормальному стані за Фігурою 10 підйомний стрижень 112 зчеплений з ходовим гвинтом 160 за допомогою фіксуючої системи, а коли вузол кулькової гайки двигуна, зображений на Фігурі 9, рухає ходовий гвинт 160, тоді підйомний стрижень 112 рухається з ходовим гвинтом 160. Аварійну зупинку описано з посиланням на Фігуру 11, на якій зображено підйомний стрижень 112 та, як слідство, й вузол регулювальних стрижнів, під час аварійної зупинки. Для того, щоб розпочати аварійну зупинку подача електроенергії до електромагнітів 177 припиняється, тобто вона відмикається. Внаслідок цього сила притягання припиняє діяти на постійні магніти 178 на фіксаторах 170, а запірна пружина 174 розпрямляється, обертаючи фіксатори 170 навколо обертових позицій 180 та в бік від ділянки зчеплення підйомного стрижня 112. Внаслідок цього фіксатори 170 від'єднуються від підйомного стрижня 112, та вузол підйомного/з'єднувального стрижня (а, як слідство, й вузол регулювального стрижня) падає у напрямку до реактора 12. На Фігурі 11 видно, що ходовий гвинт 160 все ще знаходиться на попередній висоті виймання (тобто, ходовий гвинт 160 не падає), проте подачу електроенергії до електромагнітних котушок 177 припинено, так що магнітне поле з котушок видалено. Як далі видно на Фігурі 11, обертання фіксаторів 170 навколо обертових позицій 180 зупинено внаслідок зіткнення на позиції 181 з напрямною для пружини корпуса 172 фіксаторів. Продовжуємо звертатися до Фігури 11 та далі до Фігур 12 та 13, на яких зображено повторне зчеплення механізму після аварійної зупинки, де ходовий гвинт 160 рухається до позиції повного вставлення за допомогою двигуна кулькової гайки (див. знов Фігуру 9). Датчик на дні ходового гвинта використовується для підтвердження повної вставки ходового гвинта. Звернемо особливу увагу на Фігуру 12, де ходовий гвинт 160 знаходиться біля положення повної вставки, нахилена криволінійна поверхня 182 на верхівці 111 підйомного стрижня 112, який зупиняється унизу, відведе фіксатори 170 до їхнього положення майже повністю назовні. Звернемо особливу увагу на Фігуру 13, коли відновлюється подача електроенергії до електромагнітів 177, тоді фіксатори 170 будуть знов повністю зчеплені з ділянкою зчеплення підйомного стрижня 112, так що вузол підйомного/з'єднувального стрижня знов з'єднається з ходовим гвинтом 160. Отже, можна передбачати нормальну роботу, як показано на Фігурі 10. Для повтору, Фігура 12 демонструє ходовий гвинт 160, який відведено назад до положення повної вставки під час приготування до повторного зчеплення з підйомним стрижнем 112. Електроенергія до електромагнітних котушок 177 все ще не подається, а фіксатори 170 все ще не зчеплені. Нахилені криволінійні поверхні 182 на верхівці 111 підйомного стрижня 112 замикають фіксатори 170 назад до часткового зчеплення з верхівкою 111 підйомного стрижня 112. Фігура 13 демонструє ходовий гвинт 160, який все ще знаходиться унизу, проте подачу електроенергії до електромагнітних котушок 177 відновлено. Відновлене електромагнітне поле тепер знов зчіплює фіксатори 170 з ділянкою зчеплення підйомного стрижня 112. Фігура 9 схематично демонструє придатний варіант здійснення вузла 106 кулькової гайки/двигуна, який включає нижній та верхній вузли 150, 152 кулькових гайок. Взагалі, по суті можна застосовувати будь-який тип двигуна, який має конфігурацію, придатну для функціонування у середовищі силового корпуса. Звернемося до Фігур 14 та 15, де зображено приклад варіанта здійснення, де використовується керований електронікою безщітковий двигун 184 постійного струму (BLDC) з нижчим вузлом 185 кулькової гайки. Вузол 184, 185 - це приклад варіанта здійснення вузла 106 кулькової гайки/двигуна. Звернемо особливу увагу на Фігуру 14, на якій приклад двигуна 184 BLDC включає вузол 186 намотаного сердечника статора, розташованого між зовнішньою оболонкою 187 статора та внутрішньою оболонкою 188 статора та закріпленого верхнім корпусом 189 статора та нижнім корпусом 190 статора. Постійний магнітний ротор 191 містить постійні магніти 192. Двигун 184 BLDC виробляє обертовий момент від взаємодії магнітного потоку магнітів 192 ротора та кондукторів статора, по яких йде струм, вузла 186 сердечника статора. Нижчий вузол 185 кулькової гайки є аналогічним до нижчого вузла 150 кулькової гайки з Фігури 9, але у прикладі вузла з Фігури 14 нема верхнього вузла кулькової гайки, який відповідає верхньому вузлу 152 кулькової гайки з Фігури 9. Вузол з Фігури 14 також містить радіальний підшипник 193, упорний підшипник 194, закріплений стопорною гайкою 195 упорного підшипника, та верхню кришку 196 двигуна. Ізольоване та стійке до навколишнього середовища електричне з'єднання з двигуном здійснюється за допомогою ущільнення 197 вивідного дроту. 8 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 Наприклад, деякі придатні ізольовані ущільнення вивідного дроту є доступними від Conax® Technologies (Buffalo, New York, США). Звернемо особливу увагу на Фігуру 15, на якій двигун 184 BLDC та вузол 185 нижньої кулькової гайки проілюстровано у контексті привідного механізму регулювального стрижня (CRDM) з Фігур 10-13. Приклад CRDM за Фігурою 15 також містить попередньо описаний вузол 177 електромагнітної котушки, вузол 110, який прикріплює підйомний стрижень до ходового гвинта, ходовий гвинт 160 та підйомний стрижень 112. Вузол 185 кулькової гайки зчіплює ходовий гвинт 160 так, що ходовий гвинт 160 рухається лінійно, коли двигун 184 обертає постійний магнітний ротор 191 та закріплений вузол 185 кулькової гайки. Звернемося знов до Фігур 1 та 2, на яких показано, що перевага описаної конструкції реактора полягає у тому, що середній відсік включає опірний фланець внутрішніх частин, або "середній фланець" 29. Цей відсік можна зробити відносно тонким, та він надає опору для привідного механізму регулювального стрижня та напрямних механізмів для приладів усередині активної зони. Цей відсік забезпечує електричним та гідравлічним входом для привідних механізмів регулювального стрижня (CRDM). Дренажна проходка теплоносія реактора (не зображено) довільно також включена до цього відсіку. Ця дренажна лінія, якщо вона є, довільно від'єднується внутрішнім клапаном, коли реактор знаходиться під тиском, щоб обмежити або усунути його спроможність до втрати теплоносія при аварії (LOCA). Проілюстровані верхні внутрішні компоненти 24, включаючи CRDM, не містять зображення теплоізоляції. Проте, передбачається ізолювати ці компоненти, застосовуючи ізоляційну систему, спроможну протистояти температурі конструкції, яка становить принаймні 650 °F (343 °C). Внаслідок застосування ізоляційної системи зовнішня охолоджувальна вода не буде обов'язковою, проте її також можна довільно використовувати. Наприклад, охолоджувальну воду можна подавати до електричних приладів, щоб зменшити проблеми, які виникають під час роботи при високих температурах у робочому середовищі. Ізоляційна система спрощує розташування електричного CRDM усередині силового корпуса, що зменшує загальну висоту корпуса 10 реактора, суттєво зменшує кількість проходок у корпус 10 реактора та дозволяє транспортувати укомплектований модуль реактора як суцільну установку. Інша перевага полягає у зменшенні загальної висоти конструкції ковпака (не зображено). Незважаючи на те, що наявність ізоляції вважають перевагою, інші передбачені розв'язання проблеми включають застосування охолодження водою та/або вибір матеріалів, спроможних протистояти високим робочим температурам без ізоляції. Проілюстрований варіант здійснення реактора - це конфігурація суцільного реактора, що охолоджується водою під тиском (PWR). Проте також очікується, що один або більше з описаних способів, пристроїв тощо можна придатним чином використовувати в інших типах корпусів ядерних реакторів, таких як реактори з киплячою водою (BWR), які можуть з перевагою включати внутрішні вузли CRDM, ефективні датчики положення регулювальних стрижнів тощо. Конфігурація СDRM за Фігурами 2-15 забезпечує два окремі механізми аварійної зупинки: гідравлічну аварійну зупинку, що забезпечується стоп-стрижнями, описаними з посиланням на Фігури 3-5; та механізм аварійної зупинки з магнітними фіксаторами, описаними з посиланням на Фігури 6 – 15, з системою магнітних фіксаторів, описаною з особливим посиланням на Фігури 10-15. Перевагою цієї конфігурації є можливість резервного застосування гідравлічного та магнітного механізмів аварійної зупинки, внаслідок чого зменшується ймовірність помилкової повної аварійної зупинки у випадку аварії з втратою теплоносія (LOCA) або в іншому пов'язаному з безпекою випадку. Звернемося до Фігур 16-20, на яких зображено інший варіант здійснення системи регулювального стрижня, який пропонує функціонування сірого стрижня з використанням електромагніту та систему гідравлічного фіксатора для функціонування при аварійній зупинці. Подібно до системи регулювального стрижня за Фігурами 6-15, система регулювального стрижня за Фігурами 16-20 дозволяє надійно здійснювати аварійну зупинку групи регулювальних стрижнів без аварійної зупинки ходового гвинта. Звернемося особливо до Фігури 16, на якій зображено застосування вузла двигуна/кулькової гайки з Фігури 15, так що ходовий гвинт 200 постійно з'єднаний з вузлом 185 кулькової гайки, внаслідок чого відбувається осьовий рух ходового гвинта 200, який приводиться у рух двигуном 184. Група регулювальних стрижнів (не зображено на Фігурі 16) з'єднується з ходовим гвинтом 200 за допомогою з'єднувального стрижня або вузла 204 з'єднувального стрижня та вузла 206 фіксаторів. Ходовий гвинт 200 є суттєво порожнистим, а вузол 204 з'єднувального стрижня коаксіально збігається з внутрішнім діаметром ходового гвинта 200, та він вільно пересувається вертикально усередині ходового гвинта 200. Вузол 206 фіксаторів з двома фіксаторами, навантаженими пружинами, міцно приєднаний до верхівки ходового гвинта 200. Коли фіксатори 9 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 зчіплюються зі з'єднувальним стрижнем 204, тоді вони приєднують з'єднувальний стрижень 204 до ходового гвинта 200, а коли фіксатори відчеплені, тоді вони вивільняють з'єднувальний стрижень 204 від ходового гвинта. У проілюстрованому варіанті здійснення зчеплення та відчеплення фіксатора відбувається за рахунок застосування кулачкової системи шарнірного чотириланкового механізму, яка містить два кулачкові засуви 208 та принаймні дві (та у проілюстрованому варіанті здійснення чотири) куліси 209 кулачкового засува на один кулачковий засув 208. Додаткові куліси кулачкового засува є опорою для кулачкового засува. Коли кулачкові засуви 208 рухаються угору, тоді куліси 209 кулачкового засува шарнірного чотириланкового механізму також відводять усередину кулачкові засуви 208, тим самим примушуючи фіксатори обертатися у позицію зчеплення зі з'єднувальним стрижнем 204. У проілюстрованому варіанті здійснення вузол 210 гідравлічного підйомника використовується для підйому вузлів кулачкових засувів 208. В альтернативному варіанті здійснення (не зображено) підйомна система з електричним соленоїдом використовується для підйому вузлів кулачкового засува. Коли підйомна сила прикладається до кулачкової системи, тоді рух кулачкових засувів 208 угору та усередину обертає фіксатори у позицію зчеплення, тим самим з'єднуючи з'єднувальний стрижень 204 з ходовим гвинтом 200. Це примушує групу регулювальних стрижнів рухатися з ходовим гвинтом. Коли підйомна сила усувається, тоді кулачкові засуви 208 відводяться вниз та назовні за допомогою куліс 209 кулачкового засува шарнірного чотириланкового механізму, тим самим дозволяючи фіксаторам обертатися та виходити з позиції зчеплення зі з'єднувальним стрижнем 204. Внаслідок цього з'єднувальний стрижень 204 від'єднується від ходового гвинта 200, що призводить до падіння групи регулювальних стрижнів. Під час аварійної зупинки ходовий гвинт 200 залишається у своєму положенні поточного утримання. Після аварійної зупинки ходовий гвинт 200 приводиться у рух униз, доки він не зіткнеться з дном, за допомогою електричного двигуна 202. Коли підйомна сила знов прикладається до кулачкової системи за допомогою вузла 210 гідравлічного підйомника, тоді фіксатори знов зчіплюються, та з'єднувальний стрижень знов з'єднується з ходовим гвинтом 200, та звичайне функціонування може відновитися. Крім того, передбачаються інші способи приводу фіксаторів, такі як пневматичний привід фіксаторів, при якому пневматичний тиск замінює гідравлічний тиск у проілюстрованому вузлі 210 підйомника. Продовжимо звертатися до Фігури 16, на якій для ілюстрації зображено ходовий гвинт 200 у положенні, коли його часткового витягнуто. На Фігурі 16 можна побачити, що фіксуючий вузол 206 приєднаний до верхівки ходового гвинта 200. На Фігурі 16 фіксатори зчеплені зі з'єднувальним стрижнем 204, який приєднаний до ходового гвинта та який також знаходиться у такому ж самому положенні часткового витягнення, що і ходовий гвинт 200. Кулькова гайка 185 та двигун 184 знаходяться біля дна привідного механізму регулювального стрижня (CRDM), кулачкові засуви 208 фіксатора простягаються на повну довжину одного ходу механізму, та система 210 гідравлічного підйомника розташовується зверху цього механізму. У деяких варіантах здійснення CRDM за Фігурами 16-20 - це інтегрований CRDM, у якому увесь механізм, включаючи електричний двигун 184 та кулькову гайку 185, систему 206 фіксаторів та індикатор положення (не зображено на Фіг. 16), розташований усередині силового корпуса 10 реактора в умовах повної робочої температури та повного робочого тиску. Звертаємося до Фігур 17 та 18, на яких з додатковими подробицями проілюстровано нижній кінець привідного механізму регулювального стрижня (CRDM), що містить вузол 206 фіксаторів. Вузол 206 фіксаторів включає кожух 212 для фіксаторів та фіксатори 214. Кожух 212 для фіксаторів включає рамку або опору для позицій 216 точок обертання (наприклад, осей повороту або поворотних стрижнів), навколо яких фіксатори 214 можуть обертатися. На Фігурі 16 з'єднувальний стрижень 204 витягнуто, тобто фіксатори 214 вузла 206 фіксаторів повернуті усередину у позицію зчеплення з ділянкою стикування на верхньому кінці 215 з'єднувального стрижня 204. У проілюстрованому варіанті здійснення верхівка з'єднувального стрижня 204 містить необов'язковий магніт 113 для подачі магнітного сигналу індикатору положення, основаному на застосуванні магніту (див. Фігуру 21). Фігура 17 демонструє з'єднувальний стрижень 204 при аварійній зупинці, так що фіксатори 214 повернулися назовні так, щоб від'єднатися від ділянки стикування на верхньому кінці 215 з'єднувального стрижня 204, так що з'єднувальний стрижень 204 механічно від'єднується від ходового гвинта 200 та може вільно рухатися усередині внутрішнього діаметра ходового гвинта 200. Від'єднаний таким способом, як показано на Фігурі 17, з'єднувальний стрижень 204 (та внаслідок цього і пучок або пучки регулювальних стрижнів, прикріплені до з'єднувального стрижня 204), падає у напрямку до активної зони 12 реактора під впливом сили тяжіння. Як на Фігурі 16, так і на Фігурі 17 знов зображено, що ходовий гвинт 200 є злегка витягнутим до випадкового положення, і, як видно на Фігурі 17, ходовий гвинт 200 не падає. 10 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 Звернемося особливо до Фігури 17, на якій зображено, що два кулачкові засуви 208 досягли свого максимального внутрішнього (тобто, контактного) положення. Внаслідок руху усередину кулачків кулачкових засувів 208, який спричиняється кулісами 209 кулачкового засува, фіксатори 214 обертаються або повертаються усередину у позицію повного зчеплення з ділянкою стикування на верхньому кінці 215 з'єднувального стрижня 204. Під час руху усередину до повного контакту кулачкові засуви 208 спираються по всій своїй довжині на кришку 222 кожуха для кулачкових засувів, яка зумовлює жорсткий упор проти руху усередину кулачкових засувів 208. У центрі кришки 222 кожуха для кулачкових засувів є прорізи на повну довжину ходу механізму, щоб пальці 224 або інші елементи фіксаторів, що виступають назовні, проходили крізь кришку 222 кожуха кулачкового засува та контактували з кулачковими засувами 208 у положенні, коли ходовий гвинт 200 є витягнутим. В проілюстрованому варіанті здійснення існують два фіксатори 214 та два кулачкові засуви 208, по одному на кожен фіксатор. Проте, передбачається інша кількість фіксаторів та кулачкових засувів. Як інший приклад, може бути чотири фіксатори та чотири відповідні кулачкові засуви, розташовані з інтервалами 90° навколо центральної осі ходового гвинта 200/з'єднувального стрижня 204. Проілюстровані два кулачкові засуви 208 приводять у рух відповідні два фіксатори 214 при спареному обертово-симетричному розташуванні відносно центральної осі ходового гвинта 200/з'єднувального стрижня 204. Знов, більш узагальнено, передбачається, що кількість кулачкових засувів/фіксаторів буде більшою ніж два, при цьому кількість кулачкових засувів/фіксаторів вибирається, та вони розташовуються так, щоб забезпечити фіксаторами збалансовану опору для з'єднувального стрижня 204. Нижні частини Фігур 17 та 18 також демонструють верхню частину двигуна 184, який докладно описано з посиланням на Фігуру 14 цього опису. Знов таки, показаний двигун 184 є тільки ілюстративним прикладом, та можна використовувати різні типи двигунів, такі як проілюстрований керований електронікою безщітковий двигун 184 (BLDC) постійного струму з намотаним сердечником статора та з ротором з постійним магнітом, який виробляє крутний момент внаслідок взаємодії магнітного потоку та кондукторів статора, що несе струм, або шаговий двигун з перемінним магнітним опором (VRS), який має намотаний сердечник статора та ротор з плакованої сталі, який виробляє крутний момент внаслідок змін у магнітному опорі як функцію від положення ротора, або гібридний шаговий двигун (HBS), який є комбінацією типів BLDC та VRS та в якому використовуються постійні магніти у роторі та компонент з магнітним опором для виробництва крутного моменту тощо. У деяких варіантах здійснення передбачається уникнути застосування окремих вузлів кулькових гайок та замість цього або додатково використовувати зчеплення з ходовим гвинтом безпосередньо за допомогою ротора, утворюючи різьбові зчеплення на поверхні внутрішнього діаметра ротора. Крім того, пропонується перетворювач обертання (не зображено) для запобігання обертанню ходового гвинта 200, яке виникає внаслідок роботи двигуна 184. У деяких придатних варіантах здійснення кришка 222 кожуха для кулачкових засувів включає напрямні компоненти (не зображено), які зачіплюють кожух 212 для фіксаторів, щоб запобігти обертанню кожуха 212 для фіксаторів, та, таким чином, вони служать перетворювачем обертання для запобігання обертанню ходового гвинта 200, що зумовлюється роботою двигуна 202 кулькової гайки. При такій конструкції ходовий гвинт 200 є придатним чином скріпленим з нижньою частиною 226 кожуха 212 для фіксаторів, так що попередження обертанню кожуха 212 для фіксаторів також дозволяє запобігти обертанню ходового гвинта 200. Знов особливо звернемося до Фігури 17, на якій зображено, що кулачкові засуви 208, коли повернуті усередину, утворюють колію примусового повного ходу для спрямовування зчеплених фіксаторів 214 за допомогою відведення пальців 224 фіксаторів проти кулачкових засувів 220, коли рушійний вузол (включаючи ходовий гвинт 200, кожух 212 для фіксаторів, та фіксатори 214, та замкнений з'єднувальний стрижень 204) є витягнутим (тобто, пересунутим угору) або вставленим (тобто, пересунутим униз). Гідравлічний підйом кулачкових засувів 208 зумовлює дію шарнірного чотириланкового механізму через куліси 209 кулачкових засувів, які з'єднують кулачкові засуви 208 з корпусом 232 опори кулачкових засувів. Кожна куліса 209 кулачкового засува поворотним чином прикріплена до корпуса 232 опори кулачкових засувів через позиції 234 точок обертання та до кулачкового засува 208 через позиції 235 точок обертання. Таким чином, дві куліси 209 кулачкового засува разом з частиною корпуса 232 опори кулачкового засува між позиціями 234 точок обертання куліс кулачкового засува та частиною кулачкового засува 208 між позиціями 235 точок обертання куліс кулачкового засува разом визначають шарнірний чотириланковий механізм. Довільно, можна використовувати більш ніж дві куліси 209 кулачкового засува на один кулачковий засув 208 - у проілюстрованому прикладі використовуються чотири куліси 209 кулачкового засува на один кулачковий засув 208 (див. 11 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фігуру 16). Гідравлічний підйом кулачкових засувів 208 примушує куліси 209 кулачкового засува обертатися угору навколо позицій 234 точок обертання, тим самим примушуючи кулачкові засуви 208, що підіймаються, рухатися усередину, завдяки позиціям 235 точок обертання. Коли кулачкові засуви 208 рухаються до свого кінцевого внутрішнього положення, тоді куліси 209 кулачкового засува є найближчими до горизонтального положення, проте розташовуються нижче нього, наприклад під мінімальним кутом 20° від горизонталі у деяких передбачених варіантах здійснення, що зменшує ймовірність того, що шарнірний чотириланковий механізм може застрягнути у горизонтальній мертвій точці. Тепер особливо звернемося до Фігури 18, на якій зображено, що кулачкові засуви 208 знаходяться унизу у своєму максимально зовнішньому положенні. Знов стисло кажучи, гідравлічне опускання кулачкових засувів 208 (або гравітаційне, під дією пружини та/або інше опускання кулачкових засувів 208, зумовлене усуненням гідравлічної підйомної сили) примушує куліси 209 кулачкових засувів обертатися униз навколо позицій 234 точок обертання, таким чином примушуючи кулачкові засуви 208, що підіймаються, рухатися назовні внаслідок дії шарнірного чотириланкового механізму. Рух назовні кулачкових засувів 208 дозволяє фіксаторам 214 вільно обертатися або повертатися назовні навколо позицій 216 точок обертання та відчіплюватися від з'єднувального стрижня 204, щоб розпочати падіння з'єднувального стрижня 204 та, як слідство, регулювальних стрижнів, з'єднаних зі з'єднувальним стрижнем 204. Аварійна зупинка є надійною, оскільки вага з'єднувального стрижня 204 разом з пружинами 240 фіксаторів роз'єднує фіксатори 214. Конкретніше, пружини 240 фіксаторів є стиснутими між кожухом 212 для фіксаторів та верхніми частинами фіксаторів 214 (вище позицій 216 точок обертання), так що вони відхиляють верхні частини фіксаторів 214 усередину та, внаслідок цього, відхиляють назовні нижні частини фіксаторів 214 (нижче позицій 216 точок обертання, тобто включаючи пальці 224 фіксаторів). Коли кулачкові засуви 208 рухаються назовні до повного роз'єднання, тоді вони спираються уздовж своєї усієї довжини на корпус 232 опори кулачкових засувів, який утворює жорсткий упор проти їхнього руху назовні. Коли кулачкові засуви 208 рухаються до своїх кінцевих зовнішніх положень, тоді куліси 209 кулачкових засувів є найближчими до вертикалі, проте не точно вертикальними, наприклад, під мінімальним кутом 20° від вертикалі у деяких варіантах здійснення, що зменшує ймовірність того, що шарнірний чотириланковий механізм може застрягнути у вертикальній мертвій точці. Звернемося до Фігур 19 та 20, на яких з додатковими подробицями проілюстровано верхній кінець привідного механізму регулювального стрижня (CRDM), включаючи систему 210 гідравлічного підйомника. Система 210 гідравлічного підйомника містить гідравлічний циліндр 250 та гідравлічний поршень 252. Підвіски 254 кулачкових засувів з'єднані з верхівкою поршня 252, а з'єднувальні куліси 256 простягаються униз від підвісок 254 кулачкових засувів до верхніх частин кулачкових засувів 208. Під час звичайного функціонування (Фігура 19) гідравлічний циліндр 250 знаходиться під тиском, так щоб підняти поршень 252, тим самим піднімаючи кулачкові засуви 208 за допомогою з'єднувальних елементів 254, 256. Це примушує фіксатори 214 зчіплюватися з верхнім кінцем 215 з'єднувального стрижня 204, як описано у цьому описі з посиланням на Фігуру 17. Під час аварійної зупинки (Фігура 20) у гідравлічному циліндрі 250 знижується тиск, так що поршень 252, з'єднувальні елементи 254, 256 та кулачкові засуви 208 падають під впливом сили тяжіння. Це примушує фіксатори 214 відчіплюватися від з'єднувального стрижня 204, як описано у цьому описі з посиланням на Фігуру 18. У системі гідравлічного підйомника, проілюстрованій на Фігурах 19 та 20, аварійна зупинка є надійною, внаслідок включення допоміжної пружини 260 аварійної зупинки, яка відводить поршень 252 униз, внаслідок стиснення допоміжної пружини 260 між поршнем 252 та кришкою 262 гідравлічного вузла. На Фігурах 19 та 20 для ілюстрації зображено, що ходовий гвинт 200 знаходиться у положенні повного витягнення, так що систему фіксаторів можна також побачити на Фігурах 19 та 20. Проте, функціонування системи 210 гідравлічного підйомника, як описано з посиланням на Фігури 19 та 20, можна використовувати для будь-якого положення ходового гвинта 200. Звернемося особливо до Фігури 19, як було раніше описано з посиланням на Фігуру 17, на якій зображено, що у звичайному (замкненому) стані кулачкові засуви 208 є піднятими та, завдяки дії куліс 209 кулачкових засувів, знаходяться у своєму максимальному внутрішньому положенні. Внаслідок руху кулачкових засувів 208 усередину, фіксатори 214 обертаються або повертаються у повне зчеплення з верхнім кінцем 215 з'єднувального стрижня 204. Крім того, коли кулачкові засуви 208 рухаються усередину до повного зчіплювання, тоді вони спираються по всій своїй довжині на кришку 222 кожуха для кулачкових засувів, яка утворює жорсткий упор для їхнього руху усередину. 12 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 Продовжимо звертатися до Фігури 19, на якій зображено, що в умовах зчеплення гідравлічний поршень 252 знаходиться у положенні повного підняття внаслідок прикладання тиску до гідравлічного циліндра 250. Коли поршень підіймається, тоді підвіска 254 кулачкових засувів підіймається поршнем 252 та тягне угору пару з'єднувальних куліс 256, які, у свою чергу, підіймають кулачкові засуви 208. Поршень 252 також підіймається проти сили, яка спрямована униз та яка утворюється допоміжною пружиною 260 аварійної зупинки. У деяких передбачених варіантах здійснення підйомний вузол гідравлічного поршня функціонує при перепаді тиску тільки 5,5 psi (37,9 кПа)), хоча також передбачається конструкція для роботи при більш високому перепаді тиску. Звернемо особливу увагу на Фігуру 20, як було описано раніше з посиланням на Фігуру 18, на якій показано, що у стані аварійної зупинки (відкритий стані) кулачкові засуви 208 опускаються та, внаслідок дії куліс 209 кулачкових засувів шарнірного чотириланкового механізму, знаходяться у своєму максимальному зовнішньому положенні. Рух назовні кулачкових засувів 208 дозволяє фіксаторам 214 вільно повертатися або повертатися та від'єднуватися від з'єднувального стрижня 204. На проілюстрованій Фігурі 20 з'єднувальний стрижень 204 аварійно зупинений у положенні повного вставлення, та, як слідство, з'єднувальний стрижень 204 не зображено на Фігурі 20. Коли кулачкові засуви 208 рухаються назовні до повного відчеплення, тоді вони спираються по всій своїй довжині на корпус 232 опори кулачкових засувів, внаслідок чого утворюється жорсткий упор проти їхнього руху назовні. Продовжуємо звертатися до Фігури 20, на якій зображено, що для аварійної зупинки тиск в гідравлічному циліндрі 250 на нижньому боці поршня 252 скидається, що дозволяє поршню 252 опускатися. При придатному підході скидання тиску виконується за допомогою клапана подвійної дії (не зображено), який одночасно припиняє постачання тиску до поршня 252, при цьому здійснюючи відвід з порожнини під поршнем до середовища реактора. Якщо клапан не спрацьовує, то для надійності аварійної зупинки передбачено, що він є відкритим до розвантажувального боку. Клапан зони великого потоку необов'язково використовується для того, щоб здійснити швидке виведення (зазвичай невеликого об'єму) з порожнини поршня. Коли тиск скидається, тоді спільна вага кулачкових засувів 208, з'єднувальних елементів 254, 256 та поршня 252 примушує кулачкові засуви 208 опускатися під впливом сили тяжіння, внаслідок чого фіксатори 214 відчіплюються. Необов'язково, як у проілюстрованому варіанті здійснення, передбачена допоміжна пружина 260 аварійної зупинки усередині вузла гідравлічного підйомника або поруч з ним, щоб сприяти опусканню поршня 252 та кулачкових засувів 208. Аварійна зупинка є переважно також надійною, що зумовлюється тим, що спільна дія ваги з'єднувального стрижня та пружин фіксаторів від'єднує фіксатори. Відвідна дія куліс 209 кулачкових засувів також виштовхує кулачкові засуви 208 назовні до від'єднання. Повторне зчіплювання вузла 206 фіксаторів зі з'єднувальним стрижнем 204 після аварійної зупинки можна виконати подібно до процесу повторного зчіплювання, описаного з особливим посиланням на Фігури 12 та 13 для варіанту здійснення за Фігурами 6-15. Електричний двигун 184 приводиться у рух для того, щоб рухати вузол 206 фіксаторів та ходовий гвинт 200 (які теж є з'єднаними разом) униз у напряму до верхівки 215 з'єднувального стрижня 204, який упав. Гідравлічний циліндр 250 залишається без тиску, а фіксатори 214 залишаються у положенні відчеплення внаслідок розтиснення пружин 240 фіксаторів, як показано на Фігурі 18. Отже, фіксатори 214 можна приводити у рух униз за допомогою двигуна 184 так, щоб вони на одному рівні з ділянкою стикання на верхньому кінці 215 з'єднувального стрижня 204. У проілюстрованому варіанті здійснення магніт 113, розташований на або біля верхівки 215 з'єднувального стрижня 204, магнітно виявляється за допомогою індикатора положення (не зображено) у вузлі 206 фіксаторів для того, щоб виявити, коли фіксатори 214 будуть розташовані на одному рівні з ділянкою стикання на верхньому кінці 215 з'єднувального стрижня 204. Коли фіксатори 214 розташовуються на одному рівні з ділянкою стикання на верхньому кінці 215 з'єднувального стрижня 204, тоді до гідравлічного циліндра 250 знов подається тиск, щоб підняти гідравлічний поршень 252 та тим самим підняти кулачкові засуви 208 та знов привести у зчеплення фіксатори 214. Після цього електричний двигун 184 може працювати для того, щоб привести у рух ходовий гвинт 200 та знов зчеплений з'єднувальний стрижень 204 уверх до бажаного робочого положення. В альтернативному варіанті здійснення систему 210 гідравлічного підйомника, описану з посиланням до Фігур 19 та 20, можна замінити будь-яким вузлом підйомника з електричним соленоїдом, наприклад, придатним чином розташованим на верхівці привідного механізму регулювального стрижня (CRDM) замість проілюстрованого вузла 210 гідравлічного підйомника. Такий вузол підйомника з електричним соленоїдом можна придатним чином поєднати з проілюстрованою системою фіксаторів з шарнірними чотириланковими механізмами, а вузол 13 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 206 фіксаторів при цьому функціонує, як описано у цьому описі. У цьому альтернативному варіанті здійснення замість прикладання тиску до гідравлічного поршня 252, для того щоб утворити підйомну силу для зчіплювання вузлів кулачкових засувів, підйомна сила утворюється внаслідок застосування електричного струму до соленоїда. Коли подача електричного струму припиняється, тоді підйомна сила миттєво втрачається, при цьому кулачкові засуви від'єднують фіксатори та група регулювальних стрижнів падає, як описано у цьому описі. Звернемося знов до Фігури 17 та далі звернемося до Фігури 21, де розріз S, вказаний на Фігурі 17, зображено на Фігурі 21. Розріз S проходить крізь з'єднання між кожним кулачковим засувом 208, та однією з його з'єднувальних куліс 209 кулачкового засува, та крізь палець 224 кожного фіксатора 214, та крізь магніт 113 датчика положення. Розріз S, зображений на Фігурі 21, містить корпус 232 опори кулачкового засува та вузол 232а підтримуючого кожуха для кулачків, та кожух 212 для фіксаторів, та верхівку 215 з'єднувального стрижня 204 з розрізом крізь магніт 113 датчика положення. Вигляд у розрізі S далі включає розріз крізь два кулачкові засуви 208 та пальці 224 фіксаторів та демонструє куліси 209 кулачків та позиції 234 їх точок обертання, з'єднанні з корпусом 232 опори кулачкових засувів, з розрізом крізь позиції 235 їх точок обертання, які з'єднуються з кожухом 212 для фіксаторів. Як видно на Фігурі 21, позиції 234, 235 точок обертання придатним чином утворені шпильками. Вигляд у розрізі S також демонструє проілюстрований вузол 270 магнітного індикатора положення, який виявляє магніт 113 на верхньому кінці 215 з'єднувального стрижня 204 на основі магнітного сполучання між вузлом 270 індикатора та магнітом 113. Як вже згадувалося, з'єднувальний стрижень 204 з'єднаний на своєму нижньому кінці з пучком регулювальних стрижнів. Необов'язково, це з'єднання здійснюється за допомогою одного або більше проміжних з'єднувальних елементів, наприклад, проілюстрованих поперечин 86, 88, які зображено на Фігурі 6. Звернемося до Фігур 22 та 23, на яких ядерний реактор зазвичай містить решітку або інший набір груп регулювальних стрижнів, які приводяться у дію відповідними привідними механізмами регулювальних стрижнів, які спираються на придатну опорну рамку 274 (наприклад, як показано більш докладно на Фігурі 2). У деяких варіантах здійснення електричний двигун 184 є найбільш громіздким елементом CRDM. У проілюстрованій решітці, зображеній на Фігурах 22 та 23, громіздкі двигуни 184 влаштовані у вигляді компактної решітки завдяки вертикальному східчастому розташуванню положень двигунів 184, так що двигуни 184 будь-яких двох сусідніх CRDM знаходяться не на одному рівні по вертикалі або висоті. Це дозволяє зробити решітку більш компактною порівняно з традиційними способами розташування, у яких усі двигуни знаходяться на одному вертикальному рівні або висоті. Варіанти здійснення CRDM, описані з посиланням на Фігури 6-21, переважно пропонують як спроможність східчастого регулювання "сірих стрижнів", так і спроможність ефективної аварійної зупинки, внаслідок чого вони можуть виконувати завдання, зазвичай призначені для спеціальних стоп-стрижнів (наприклад, як описано у цьому описі з посиланням на Фігури 3-5). Отже, передбачається уникнути застосування спеціальних стоп-стрижнів та замість них повністю покластися на такі регулювальні стрижні за варіантами здійснення цього винаходу, які описано з посиланням на Фігури 6-21, наприклад, розташовані, як показано на Фігурах 22 та 23. У варіанті здійснення цього винаходу для того, щоб мати додатковий резерв під час LOCA або іншої аварійної події, передбачається застосовувати конфігурацію, яка включає: (і) неспеціальні стоп-стрижні; (іі) перший набір регулювальних стрижнів з гідравлічним підйомником, як описано у цьому описі з посиланням на Фігури 16-21, так щоб у випадку аварії стрижні виконували функцію зупинення за допомогою гідравлічного механізму; та (ііі) другий набір регулювальних стрижнів з такою конфігурацією, щоб виконувати функцію зупинення за допомогою електромагнітного механізму. Останній набір (ііі) можна втілити, наприклад, за допомогою регулювальних стрижнів, що відповідають варіанту здійснення, описаному у цьому описі з посиланням на Фігури 6-15, або, альтернативно, за допомогою регулювальних стрижнів, що відповідають варіанту здійснення, описаному у цьому описі з посиланням на Фігури 16-21, але система 210 гідравлічного підйомника при цьому заміщена системою підйомника з соленоїдом. При такому влаштуванні переважно використовуються (або можуть використовуватися) усі доступні регулювальні стрижні для регулювання реактивності, при цьому також утворюється подвійна резервна (гідравлічна або електромагнітна) система безпеки. Знов звернемося до варіантів здійснення CRDM за Фігурами 6-20, на яких перевага застосування фіксатора для від'єднання з'єднувального стрижня 204 від ходового гвинта 200 (та, внаслідок цього, від'єднання з'єднувального стрижня 204 від CRDM) полягає у тому, що CRDM може мати конфігурацію, придатну для видалення з'єднувального стрижня 204 крізь CRDM без видалення спочатку CRDM. Для здійснення такої спроможності CRDM будують з 14 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 порожнистою центральною зоною, яка забезпечує наскрізний прохід, крізь який може проходити з'єднувальний стрижень 204, коли він від'єднаний від ходового гвинта 200. Циліндричний отвір 280 (див. Фігури 18 та 20) у вузлі фіксаторів робиться достатньо великим для проходження крізь нього з'єднувального стрижня 204, коли фіксатори 214 є відкритими. У варіанті здійснення за Фігурами 6-15, такий отвір можна влаштувати за рахунок заміщення розташованої по центру пружини 174 фіксатора розташованим збоку відхиляючим механізмом, подібним до пружин 240 фіксаторів варіанта здійснення за Фігурами 16-21. Для варіанта здійснення за Фігурами 16-21 циліндричний отвір 282 також забезпечений у системі 210 гідравлічного підйомника (див. Фігури 19 та 20). Обидва отвори 280, 282 роблять достатньо великими для проходження крізь них з'єднувального стрижня 204, коли фіксатори 214 є відкритими. Що стосується останнього отвору 282, то допоміжна пружина 260 аварійної зупинки є відповідною кільцевою пружиною, що відповідає отвору 282, та поршень 252 також придатним чином виготовляється порожнистим з необхідним внутрішнім діаметром. У випадку альтернативного підйомного механізму, такого як соленоїдний підйомник, соленоїд є, відповідно, порожнистим. Звернемося до Фігур 24 та 25, на яких зображено, що для того, щоб з'єднувальний стрижень 204 можна було б вилучати крізь CRDM, він мусить мати таке рознімне з'єднання з хрестовиною або іншою механічною структурою регулювального стрижня, щоб (і) зверху CRDM його можна було б від'єднати від хрестовини та щоб (іі) зовнішній діаметр з'єднувального стрижня 204 на рознімному з'єднанні не був надмірно великим, щоб не заважати вилучанню нижнього кінця з'єднувального стрижня 204 крізь отвори 280, 282. Фігури 24 та 25 демонструють одне придатне рознімне з'єднання, у якому низькопрофільна "J-канавка" з'єднує з'єднувальний стрижень 204 з пучком регулювальних стрижнів. У цьому проілюстрованому рознімному з'єднанні одна або більше канавок 300 у формі перевернутої літери "J" утворені у нижньому кінці з'єднувального стрижня 204. Оскільки ці канавки прорізані у з'єднувальному стрижні 204, то J-канавки 300 не збільшують зовнішній діаметр з'єднувального стрижня 204 на нижньому кінці. Підтискувальна пружина 302 закінчується на кінці, близькому до з'єднувального стрижня 204, завдяки застосуванню елемента 304 спрямовування/захоплення пружини, а елементи 302, 304 розташовуються усередині зазвичай циліндричної нарізної кришки 306 групи стрижнів, яка кріпиться до верхівки групи 310 стрижнів. Кришка 306 групи включає стикувальні виступи 312, які мають такий розмір та таке положення, щоб ковзати у канавках 300 у формі перевернутої літери "J" з'єднувального стрижня 204. Для того, щоб здійснити з'єднання, довгі вертикальні частини канавок 300 у формі перевернутої літери "J" ставлять навпроти стикувальних виступів 312 кришки 306 групи, а потім з'єднувальний стрижень 204 штовхають униз проти сили пружини 302, так що виступи 312 входять у довгі вертикальні частини канавок 300. Коли з'єднувальний стрижень 204 заштовхують униз достатньо далеко для того, щоб виступи 312 досягли горизонтальних частин канавок 300 у формі перевернутої літери "J", тоді з'єднувальний стрижень обертають за допомогою обертання 314 (по часовій стрілці на Фігурах 24 та 25), доки виступи 312 не стануть на одному рівні з короткими вертикальними частинами канавок 300 у формі перевернутої літери "J". На цьому етапі усування спрямованої униз сили дозволяє спрямованій угору пружній силі, яка створюється пружиною 302, виштовхувати з'єднувальний стрижень 204 угору для того, щоб замкнути виступи 32 у коротких вертикальних частинах канавок 300 у формі перевернутої літери "J". Процес є зворотнім, щоб від'єднати з'єднувальний стрижень 204 від групи 310 стрижнів. Після припинення дії зовнішньої сили пружина 302 та елемент 304 спрямовування/захоплення утримуються у групі 310 стрижнів за допомогою кришки 306 групи. Отже, приєднання/від'єднання з'єднувального стрижня 204 та групи 310 стрижнів можна з перевагою здійснювати за допомогою фіксаторів 214, які є відчепленими, так щоб з'єднувальний стрижень 204 можна було б встановити або видалити, тоді як CRDM залишається на місці роботи. Це є можливим, оскільки ходовий гвинт 200 та з'єднувальний стрижень 204 не з'єднані разом безпосередньо, але вони з'єднуються за допомогою вузла 206 фіксаторів. Коли фіксатори 214 відчеплені, тоді з'єднувальний стрижень 204 може вільно рухатися усередині по суті порожнистого ходового гвинта 200, та з'єднувальний стрижень 204 може також проходити крізь вузол 210 гідравлічного підйомника, якщо гідравлічний поршень 252 (або порожнистий соленоїд у випадку електромагнітного підйомного механізму) також є по суті порожнистим, а гідравлічний циліндр 250 має форму кільця з достатньо великим внутрішнім діаметром. Отже, при встановленні з'єднувального стрижня 204 можна вставляти з'єднувальний стрижень 204 в отвір CRDM та штовхати його униз, доки він не стисне пружину 302 (див. Фігури 24 та 25), з наступним обертанням з'єднувального стрижня 204, таким як проілюстроване обертання 314, та вивільненням з'єднувального стрижня 204, так що сила пружини 302 завершує замикання з'єднання. Для того, щоб видалити з'єднувальний стрижень 204, процес 15 UA 109430 C2 5 виконують у зворотному порядку. Було проілюстровано та описано переважні варіанти здійснення винаходу. Очевидно, що після прочитання та розуміння попереднього докладного опису у читача можуть виникнути модифікації та зміни. Ми наполягаємо, що винахід було створено як такий, що включає усі такі модифікації та зміни, доки вони відповідають обсягу формули винаходу, що додається, або еквівалентам вказаного. ФОРМУЛА ВИНАХОДУ 10 15 20 25 30 35 40 45 50 55 60 1. Механізм регулювального стрижня для використання у ядерному реакторі, при цьому механізм регулювального стрижня містить: принаймні один регулювальний стрижень, який має конфігурацію для вставляння в активну зону реактора для поглинання нейтронів; порожнистий ходовий гвинт; двигун, який є оперативно з'єднаним з порожнистим ходовим гвинтом, щоб приводити у лінійний рух порожнистий ходовий гвинт у напрямку до активної зони реактора та назад від неї; з'єднувальний стрижень, з'єднаний з принаймні одним регулювальним стрижнем та розташований частково усередині порожнистого ходового гвинта; вузол фіксаторів, який має фіксатори, які, коли вони є замкненими, оперативно з'єднують з'єднувальний стрижень та ходовий гвинт, так що, коли фіксатори є замкненими, з'єднувальний стрижень та принаймні один регулювальний стрижень рухаються разом з ходовим гвинтом, коли ходовий гвинт приводиться у рух двигуном; та механізм вивільнення, який має таку конфігурацію, щоб примушувати фіксатори вузла фіксаторів відкриватися у відповідь на умови аварійної зупинки, для того, щоб від'єднати з'єднувальний стрижень від ходового гвинта, так що з'єднувальний стрижень та принаймні один регулювальний стрижень падають, але при цьому ходовий гвинт залишається оперативно з'єднаним з двигуном та не падає. 2. Механізм регулювального стрижня за п. 1, де принаймні один регулювальний стрижень включає набір регулювальних стрижнів, з'єднаних зі з'єднувальним стрижнем за допомогою принаймні однієї хрестовини та поперечини. 3. Механізм регулювального стрижня за п. 1, де механізм вивільнення має гідравлічний привід та відкривається у відповідь на скидання гідравлічного тиску. 4. Механізм регулювального стрижня за п. 1, де вузол фіксаторів та ходовий гвинт закріплені разом, так що вузол фіксаторів, який містить фіксатори, рухається разом з ходовим гвинтом, коли двигун приводить у лінійний рух ходовий гвинт у напрямку до активної зони реактора або назад від неї. 5. Механізм регулювального стрижня за п. 4, де механізм вивільнення містить: вузол підйомника; подовжені елементи, які розташовані паралельно ходовому гвинту та мають таку конфігурацію, щоб їх підіймав вузол підйомника; та механічне шарнірне з'єднання, яке має таку конфігурацію, щоб примушувати подовжені елементи входити у контакт з фіксаторами вузла фіксаторів та замикати їх при підйомі кулачкових засувів за допомогою вузла підйомника. 6. Механізм регулювального стрижня за п. 5, де подовжені елементи мають подовження, достатнє для того, щоб увійти у контакт з фіксаторами вузла фіксаторів та замкнути їх при будьякому положенні ходового гвинта, яке можна отримати із використовуванням двигуна. 7. Механізм регулювального стрижня за п. 5, де механічне шарнірне з'єднання включає принаймні один шарнірний чотириланковий механізм. 8. Привідний механізм регулювального стрижня (CRDM), який містить: ходовий гвинт; двигун, з'єднаний за допомогою різьби з ходовим гвинтом для того, щоб приводити у лінійний рух ходовий гвинт у напрямку вставляння або у протилежному напрямку виймання; вузол фіксаторів, прикріплений до ходового гвинта та маючий таку конфігурацію, щоб (і) зчіплюватися зі з'єднувальним стрижнем та (іі) відчіплюватися від з'єднувального стрижня, при цьому з'єднувальний стрижень вільно рухається у напрямку вставляння, коли він є відчепленим; та механізм вивільнення, який має таку конфігурацію, щоб вибірково відчіплювати вузол фіксаторів від з'єднувального стрижня. 9. CRDM за п. 8, де ходовий гвинт є порожнистим, а частина з'єднувального стрижня розташована усередині порожнистого ходового гвинта. 16 UA 109430 C2 5 10 15 20 25 30 35 40 45 50 55 60 10. CRDM за п. 9, де CRDM має таку конфігурацію, яка дозволяє вилучати з'єднувальний стрижень з CRDM внаслідок (і) роботи механізму вивільнення, завдяки чому вузол фіксаторів відчіплюється від з'єднувального стрижня, та (іі) виймання з'єднувального стрижня у напрямку виймання крізь CRDM. 11. CRDM за п. 10, де вузол фіксаторів є порожнистим, що дозволяє виймати з'єднувальний стрижень у напрямку виймання крізь вузол фіксаторів. 12. CRDM за п. 8, де механізм вивільнення являє собою гідравлічний механізм, який замикає вузол фіксаторів, коли подається тиск, та відкриває вузол фіксаторів, коли тиск скидається. 13. CRDM за п. 8, де механізм вивільнення містить: подовжені елементи, розташовані паралельно ходовому гвинту; та механічне шарнірне з'єднання, яке призначено для того, щоб примушувати подовжені елементи входити у контакт з вузлом фіксаторів та замикати його у відповідь на силу, що прикладається. 14. CRDM за п. 13, де механізм вивільнення далі містить: механізм підйомника, який може вибірково функціонувати для надання сили, що прикладається. 15. CRDM за п. 14, де механізм підйомника вибраний з групи, що складається з (і) гідравлічного поршня та (іі) електричного соленоїда. 16. CRDM за п. 13, де механічне шарнірне з'єднання включає принаймні один шарнірний чотириланковий механізм. 17. CRDM за п. 8, який далі містить: принаймні один вузол кулькової гайки, що утворює різьбове з'єднання між двигуном та ходовим гвинтом. 18. Привідний механізм регулювального стрижня (CRDM), який містить: набір пристроїв CRDM, кожен з яких містить ходовий гвинт та двигун, який має таку конфігурацію, щоб приводити у рух ходовий гвинт; та опору, на яку спирається набір пристроїв CRDM у корпусі ядерного реактора з двигунами прилеглих пристроїв CRDM, розташованими на різній висоті відносно активної зони реактора корпуса ядерного реактора; де кожен пристрій CRDM з'єднаний з одним або декількома регулювальними стрижнями, так що двигун, що приводить у рух ходовий гвинт, рухає з'єднані один або декілька регулювальних стрижнів у напрямку до, назад від або усередині активної зони реактора. 19. CRDM за п. 18, де кожен пристрій CRDM далі містить: вузол фіксаторів, який є скріпленим з ходовим гвинтом та який має таку конфігурацію, щоб замикати з'єднання з'єднувального стрижня та ходового гвинта; та механізм вивільнення, який має таку конфігурацію, щоб відкривати вузол фіксаторів, щоб роз'єднати з'єднувальний стрижень та ходовий гвинт у відповідь на умови аварійної зупинки. 20. CRDM за п. 18, де ходовий гвинт та двигун кожного пристрою CRDM та опора - усі розташовані повністю усередині корпуса ядерного реактора. 21. Привідний механізм регулювального стрижня (CRDM), який містить: ходовий гвинт; вузол приводу, який має таку конфігурацію, щоб приводити у лінійний рух ходовий гвинт у напрямку вставляння або у протилежному напрямку виймання, при цьому вузол приводу містить двигун та принаймні одну незнімну кулькову гайку, з'єднану з ходовим гвинтом; та вузол фіксаторів, з'єднаний з ходовим гвинтом та маючий (і) стан замкнення, при якому вузол фіксаторів замикає з'єднувальний стрижень, та (іі) стан розімкнення, при якому вузол фіксаторів не замикає з'єднувальний стрижень. 22. CRDM за п. 21, який далі містить: механізм закриття фіксаторів, який можна оперативно використовувати для вибіркового замикання вузлом фіксаторів з'єднувального стрижня. 23. CRDM за п. 22, де механізм закриття фіксаторів містить один (і) гідравлічний поршень та (іі) електричний соленоїд. 24. CRDM за п. 22, де механізм закриття фіксаторів містить механічне шарнірне з'єднання, яке має довжину, паралельну ходовому гвинту, що є принаймні такою, яка дорівнює одному ходу вузла приводу. 25. CRDM за п. 24, де механічне шарнірне з'єднання включає шарнірний чотириланковий механізм. 26. Механізм регулювального стрижня для використання у ядерному реакторі, при цьому механізм регулювального стрижня містить: принаймні один регулювальний стрижень; з'єднувальний стрижень, з'єднаний з принаймні одним регулювальним стрижнем на нижньому кінці з'єднувального стрижня; та 17 UA 109430 C2 5 10 привідний механізм регулювального стрижня (CRDM), який містить: вузол фіксаторів, який має (і) стан замкнення, при якому вузол фіксаторів замикає верхній кінець з'єднувального стрижня, та (іі) стан розімкнення, при якому вузол фіксаторів не замикає верхній кінець з'єднувального стрижня; та лінійний привідний механізм, який має таку конфігурацію, щоб приводити у лінійний рух вузол фіксаторів у напрямку до активної зони ядерного реактора або назад від неї. 27. Механізм регулювального стрижня за п. 26, де CRDM має таку конфігурацію, яка дозволяє вилучати з'єднувальний стрижень шляхом введення вузла фіксаторів у стан розімкнення та виймання з'єднувального стрижня з активної зони ядерного реактора крізь CRDM. 28. Механізм регулювального стрижня за п. 27, де CRDM є порожнистим, що дозволяє виймати з'єднувальний стрижень з активної зони ядерного реактора крізь CRDM. 18 UA 109430 C2 19 UA 109430 C2 20 UA 109430 C2 21 UA 109430 C2 22 UA 109430 C2 23 UA 109430 C2 24 UA 109430 C2 25 UA 109430 C2 26 UA 109430 C2 27 UA 109430 C2 28
ДивитисяДодаткова інформація
Автори англійськоюDeSantis, Paul, K.
Автори російськоюДеСантис Пол К.
МПК / Мітки
МПК: G21C 7/00
Мітки: стрижня, привідний, реактора, ядерного, механізм, регулювального
Код посилання
<a href="https://ua.patents.su/44-109430-prividnijj-mekhanizm-regulyuvalnogo-strizhnya-dlya-yadernogo-reaktora.html" target="_blank" rel="follow" title="База патентів України">Привідний механізм регулювального стрижня для ядерного реактора</a>
Привідний механізм регулювального стрижня для ядерного реактора
Номер патенту: 105667
Опубліковано: 10.06.2014
Автори: Стамбаух Кевін Дж., Макков'як Аллан Ар., МакЛафлін Джон П., ДеСантіс Пол К.
МПК: G21C 7/00
Мітки: регулювального, ядерного, стрижня, реактора, привідний, механізм
Формула / Реферат:
1. Механізм регулювального стрижня для використання у ядерному реакторі, який містить:регулювальний стрижень, який має конфігурацію для вставляння в активну зону реактора для поглинання нейтронів;з'єднувальний стрижень, який має нижній кінець, з'єднаний з регулювальним стрижнем;привідний механізм, який включає пустотілий ходовий гвинт, зчеплений з гайкою, яка приводиться у рух за допомогою двигуна, і встановлений з...
Ядерний реактор, активна зона ядерного реактора, спосіб управління активною зоною ядерного реактора, осередок “ядро-оболонка” паливних елементів ядерного реактора
Номер патенту: 42847
Опубліковано: 15.11.2001
Автор: Радковскі Елвін
Мітки: ядро-оболонка, реактор, ядерного, управління, зона, ядерний, елементів, спосіб, осередок, активною, реактора, зоною, активна, паливних
Формула / Реферат:
1. Ядерний реактор, що включає активну зону з великою кількістю осередків "ядро-оболонка", причому кожен з осередків "ядро-оболонка" має центральну зону ядра, яка містить паливні елементи ядра, виготовлені зі здатного до ядерного розпаду матеріалу, що включає U-235, U-238, та сповільнювач, і кільцеподібну зону оболонки, яка оточує зону ядра і містить паливні елементи оболонки, які включають торій і збагачений уран або їх...
Каркас тепловидільної збірки ядерного реактора, спосіб виготовлення каркаса з паливними елементами та тепловидільна збірка ядерного реактора (варіанти)
Номер патенту: 93369
Опубліковано: 10.02.2011
Автори: Кребтрі Гері К., Альошин Юрій, Сперроу Джеймс А.
МПК: G21C 3/00
Мітки: збірки, каркас, ядерного, паливними, тепловидільної, виготовлення, варіанти, каркаса, спосіб, збірка, елементами, тепловидільна, реактора
Формула / Реферат:
1. Каркас тепловидільної збірки ядерного реактора, який відрізняється тим, що він містить:головку;хвостовик;набір достатньо довгих трубок напрямних каналів, розташованих в осьовому напрямку, причому ці трубки розташовані на певній відстані одна від одної, паралельні одна одній і тягнуться в осьовому напрямку від головки до хвостовика;набір дистанціонуючих решіток, розташованих послідовно одна за одною між головкою...
Вставка стрижня магнітопроводу електричного реактора
Номер патенту: 62647
Опубліковано: 15.09.2006
Автори: Попов Андрій Григорович, Юрков Олексій Іванович, Машошин Владислав Васильович, Кобилецький Анатолій Андрійович
МПК: H01F 27/26, H01F 3/00, H01F 27/24
Мітки: реактора, магнітопроводу, стрижня, вставка, електричного
Формула / Реферат:
Винахід відноситься до аналітичної хімії, а саме до способів фотометричного визначення нітробензойних кислот і може бути використаний у заводських, науково-дослідних і хіміко-аналітичних лабораторіях.Спосіб екстракційно-фотометричного визначення нітробензойних кислот, який включає в себе утворення іонного асоціату нітробензойних кислот з органічною основою, екстракцію його органічним розчинником і наступне фотометрування екстрактів,...
Регулюючий стрижень корпусного водоохолоджуваного ядерного реактора

Номер патенту: 29541
Опубліковано: 15.11.2000
Автори: Ряховскіх Віктор Івановіч, Пономарєнко Віктор Борісовіч, Чернишов Владімір Міхайловіч, Маковскій Владімір Даніловіч, Васільчєнко Іван Нікітовіч, Осадчій Алєксандр Івановіч, Лунін Глєб Лєонідовіч, Пославскій Алєксандр Олєговіч
Мітки: ядерного, регулюючий, реактора, стрижень, водоохолоджуваного, корпусного
Текст:
...що вступає в реакцію з нейтронами (n, g), використаний карбід бору, а в якості матеріалу, що вступає в реакцію з нейтронами (n, g), ви користаний монотитанат диспрозію (Dy2О 3 x TiO 2) і/або дититанат диспрозію (Dy2O 3 x TiO7), і/або гафнат диспрозію (Dy2O 3 x HfO2). Карбід бору і матеріал на основі диспрозію можуть бути застосовані в вигляді порошку і/або в вигляді таблеток. При застосуванні карбіду бору в вигляді порошку доцільно...
Попередній патент: Похідні імідазолу для лікування раку
Наступний патент: Скляна пробка для закриття пляшок
Випадковий патент: Панель, зокрема панель для підлоги