Інформаційно-вимірювальна система
Номер патенту: 115187
Опубліковано: 25.09.2017
Автори: Конельський Віктор Анатолійович, Манжело Валерій Олександрович, Конельский Олексій Володимирович, Конельський Володимир Анатолійович
Формула / Реферат
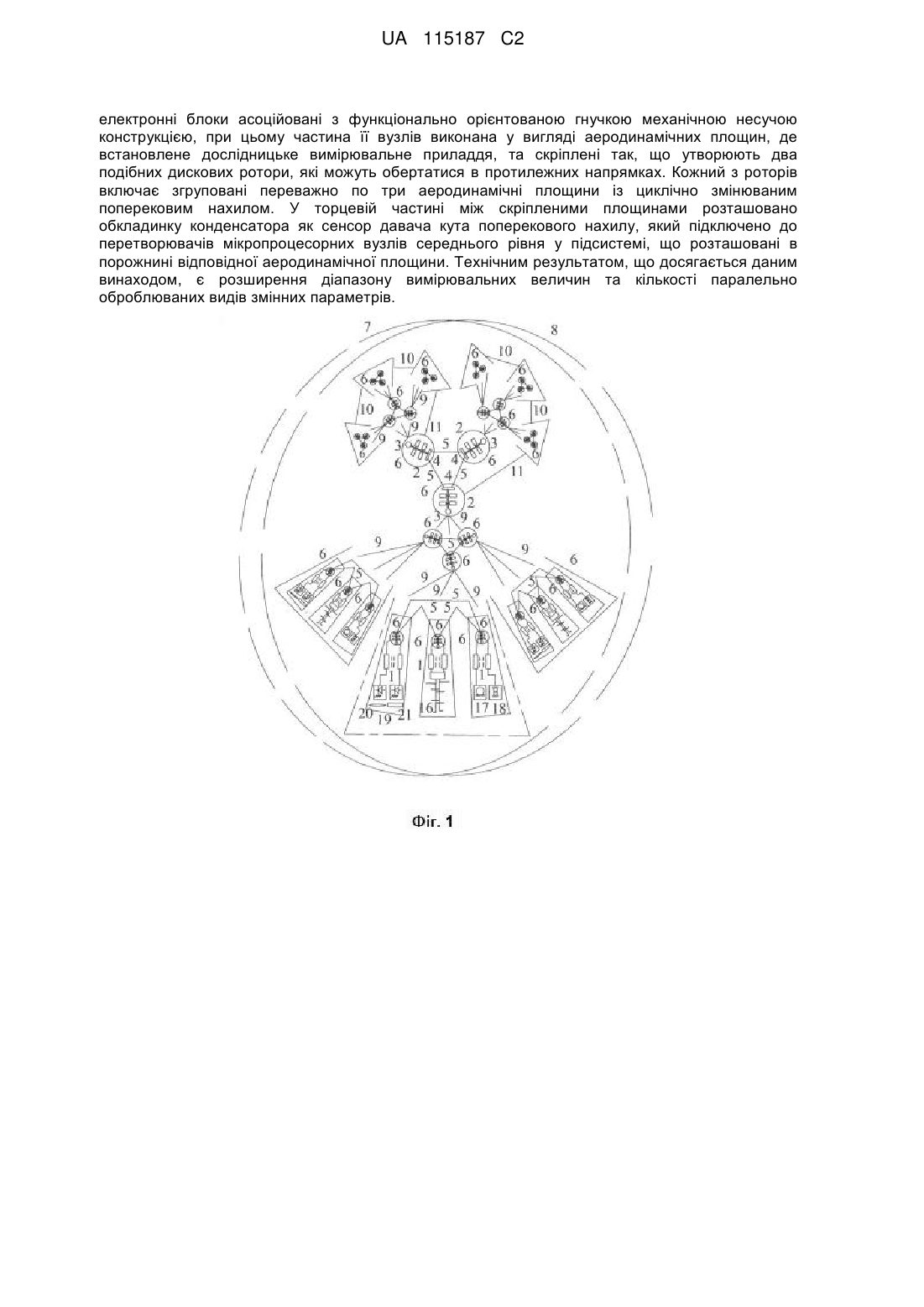
1. Інформаційно-вимірювальна система, що включає давачі (1) з вимірювальними перетворювачами (2) та мікропроцесори (3) з інтерфейсними пристроями (4), і з них сформовано основу мікропроцесорного вузла, а також канали міжвузлових зв'язків, із залученням яких у межах системи утворено автономну мережу передавання цифрових кодів, в якій мікропроцесорні вузли розподілені на окремі функціональні рівні, та мікропроцесорні вузли для кожного з цих рівнів з'єднані каналами (5) міжвузлових зв'язків по три в одному кластері, і в загальній структурі мережа об'єднана в дві окремі подібні підсистеми (7, 8), де мікропроцесорні вузли (6) кластерів верхнього рівня кожної з підсистем підключені до трьох мікропроцесорних вузлів (12), що складають спільний кластер супервізорного рівня, коли частина електронних блоків безпосередньо асоційована як із структурною одиницею для всієї системи з функціонально орієнтованою гнучкою механічною несучою конструкцією, а сенсори давачів механічних зрушень її деталей виконані як інтегровані конденсатори функціонально змінюваної ємності, і при цьому частина вузлів механічної конструкції виконана у вигляді двох типів аеродинамічних площин, адаптованих для розміщення в їх межах базового дослідницького вимірювального приладдя, яка відрізняється тим, що усі функціональні аеродинамічні площини першого (24) і другого (28) типів скріплені між собою з використанням їх торцевих частин (26, 30) так, що вони зорієнтовані відцентрово по радіусах і утворюють два окремих подібних один до одного дискових ротори (64, 65), які обертаються в протилежних напрямках, а кожний з роторів включає згруповані по три аеродинамічні площини (24) першого типу, циклічно переміщувані з поперековим нахилом так, що кожну, з обмеженням у границях гострого кута вільного обертання із віссю (27) кріплення, перпендикулярною до задніх торцевих частин (26) та співпадаючою із радіусом ротора, приєднано до зовнішньої торцевої частини (30) кожної однієї з набору аеродинамічних площин (28) другого типу, коли остання встановлена із постійним кутом атаки та закріплена по її ближчій до центру внутрішній торцевій частині (29) перпендикулярно до утворюючих ліній одного з двох циліндричних двостінних стаканів (71), які в робочому режимі вимірювань здатні до постійного вільного обертання навколо їх центральної геометричної осі, що є загальною для гнучкої механічної несучої конструкції і спільною із осями обох роторів та додаткового внутрішнього циліндра (73), котрий виконаний як центральна опора для рухомих частин, де він є закритим з обох боків по його торцях кришками (78) із решітчастими подовженнями у вигляді радіальних спиць (79), які скріплені на зовнішніх краях, розташованих в тій самій площині діелектричним кільцем (80) із поперековим перерізом коробчастої форми, у якому стінка його внутрішнього контуру виходить за межі круга обертання зовнішніх торцевих частин (30) аеродинамічних площин (28) другого типу, а стінка його зовнішнього контуру не перекриває задніх торцевих частин (26) аеродинамічних площин (24) першого типу, у яких в межах фізичного обсягу їх внутрішніх порожнин постали змонтованими по одному мікропроцесорному вузлу (6) кожного кластера найнижчого рівня одної підсистеми (7, 8) із приналежними до цього вузла перетворювачами (2) та давачами (1) разом з їх сенсорами або у вигляді мініатюрних спрямованих радіоантен (16), або мікрофонних капсулів (17, 18), або чутливих поверхонь оптичного блока (19), коли в кожному обсязі порожнин аеродинамічних площин (28) другого типу розміщено по три мікропроцесорних вузли (6) одного кластера середнього рівня підсистеми, а у вільному обсязі між боковими поверхнями кожного циліндричного двостінного стакана (71), де за допомогою нерухомого кріплення на його зовнішній стінці зібрано у єдиний блок повний набір аеродинамічних площин (24, 28) одного з двох роторів (64, 65), встановлені мікропроцесорні вузли (6) кластера верхнього рівня цієї підсистеми разом із засобами для їх інформаційного бездротового оптичного зв'язку із інтерфейсними пристроями (4) мікропроцесорних вузлів (12) кластера супервізорного рівня, складові якого в об'єднанні разом із джерелами електроживлення усієї системи розташовано в межах внутрішнього циліндра (73), та, крім цього, до механічно зв'язаних з ним частин несучої конструкції включено додаткові електромагніти (45-48), що є змонтованими у внутрішніх коробах діелектричних кілець (80), котрі скріпили кінцівки радіальних спиць (79) решітчастих кришок (78) і разом з ними несуть електричні провідники, через які електромагніти (45-48) підключені до джерел електроживлення так, що під керуванням сигналами від мікропроцесорних вузлів (12) кластера супервізорного рівня із дією струмових імпульсів (66-68) усі разом створили пари синхронних лінійних електродвигунів, за допомогою яких шляхом цілеспрямованої зміни активації струмом живлення котушок електромагнітів (45-48) у кожну миттєвість роботи усієї системи встановлено послідовно задану у відповідності із комп'ютерною програмою кутову позицію по кругу та поперековий нахил для кожної з аеродинамічних площин (24) першого типу.
2. Інформаційно-вимірювальна система за п. 1, яка відрізняється тим, що у аеродинамічних площинах (24) першого типу по лініях радіусів ротора біля їх ближчих до центру задніх торцевих частин (26) є по дві пари вертикальних діелектричних магнітожорстких керамічних стрижнів (39) із осьовою поляризацією намагнічування, встановлених так, що окружності їх розташування близькі до відповідних окружностей вертикальних геометричних осей полюсних закінчень електромагнітів (45-48) лінійних синхронних електродвигунів із своїми котушками та підковоподібними діелектричними магнітом'якими керамічними магнітопроводами, коли їх горизонтальні частини орієнтовані по продовженнях ліній радіальних спиць (79) у кільцях (80) кожної решітчастої кришки (78), і при цьому крок розміщення самих електромагнітів через довжину контуру кільця виражено дробом із знаменником, кратним до кількості аеродинамічних площин (24) першого типу в одному роторі, а в діелектричному діамагнітному матеріалі, який скріплює магнітожорсткі керамічні стрижні в єдиний блок, у вигляді пластинчатої каретки (38), розміщено додатково дві котушки (40) із діелектричними магнітом'якими керамічними магнітопроводами (41), кінці кожної з яких приєднано через напівпровідникові випрямляючі мости до обкладинок конденсаторів інтегруючих чарунок (42), які підключено так, що струм їх періодичного розряду через електронні стабілізатори спрямовано для живлення мікропроцесорних вузлів (6) з приєднаними у їх складі перетворювачами (2) і давачами (1), котрі є розташованими в суміжних порожнинах аеродинамічних площин (24) першого і (28) другого типів, а також приладів із кластерів у циліндричному двостінному стакані (71).
3. Інформаційно-вимірювальна система за пп. 1-2, яка відрізняється тим, що у безпосередній близькості до зовнішньої торцевої частини (30) аеродинамічної площини (28) другого типу та паралельно із площиною суміжного з нею бокового торця пластини (37) каретки (38) розташовано провідникову поверхню обкладинки (43) конденсатора відкритого коливального контуру додаткового високочастотного генератора (44) давача кута поперекового нахилу для кожної однієї з трьох аеродинамічних площин (24) першого типу, які тут встановлені рухомими з обмеженням обертання в границях гострого кута їх пустотілої осі (27) кріплення у втулках (36), а високочастотні генератори (44) підключені до перетворювачів (2) мікропроцесорних вузлів (6) одного кластера середнього рівня підсистеми, який розташовано в порожнині цієї аеродинамічної площини (28) другого типу.
Текст
Реферат: Винахід належить до інформаційно-вимірювальних систем, а саме засобів вимірювання фізичних величин. Інформаційно-вимірювальна система включає давачі з вимірювальними перетворювачами та мікропроцесори з інтерфейсними пристроями, а також канали міжвузлових зв'язків, із залученням яких утворено автономну мережу передавання кодів, в якій мікропроцесорні вузли розподілені на окремі функціональні рівні по три в одному кластері, а мережа об'єднала дві окремі підсистеми із спільним кластером супервізорного рівня, причому UA 115187 C2 (12) UA 115187 C2 електронні блоки асоційовані з функціонально орієнтованою гнучкою механічною несучою конструкцією, при цьому частина її вузлів виконана у вигляді аеродинамічних площин, де встановлене дослідницьке вимірювальне приладдя, та скріплені так, що утворюють два подібних дискових ротори, які можуть обертатися в протилежних напрямках. Кожний з роторів включає згруповані переважно по три аеродинамічні площини із циклічно змінюваним поперековим нахилом. У торцевій частині між скріпленими площинами розташовано обкладинку конденсатора як сенсор давача кута поперекового нахилу, який підключено до перетворювачів мікропроцесорних вузлів середнього рівня у підсистемі, що розташовані в порожнині відповідної аеродинамічної площини. Технічним результатом, що досягається даним винаходом, є розширення діапазону вимірювальних величин та кількості паралельно оброблюваних видів змінних параметрів. UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до засобів вимірювання фізичних величин, а саме до систем, складених із пристроїв, що здатні під час вимірювання сприймати фізичну взаємодію середовища з чутливими органами (сенсорами) вхідних блоків цих пристроїв (давачів), формуючи функціонально визначений електричний сигнал, а також потім останній перетворювати у відповідний математично обчислений цифровий код (цифрове вимірювальне перетворення). Мікропроцесорні пристрої та канали зв'язку між ними забезпечують в системі автоматичну реалізацію наперед заданої програми вимірювань та передавання отриманої інформації у вигляді потоку даних (цифрових кодів) на адресу інших приймачів, включаючи і такі, що знаходяться на віддалені від місця базової обробки основного масиву даних. Інформаційно-вимірювальна система з наданими вище ознаками може використовуватися в промисловості та науково-дослідницькій діяльності при забезпеченні якісної технічної підтримки широкого кола реальних задач автоматичних вимірювань у тому числі і таких, які переважно викликані геофізичними та діагностичними роботами, пов'язаними із вивченням миттєвих відгуків довкілля на дію швидкоплинних збуджуючих процесів або спостереженням за джерелами акустичних чи електромагнітних хвиль та іонізуючого випромінювання, коли їх прояв гранично обмежений у часі існування через зміну умов сприйняття сигналів, наприклад, із погіршенням "видимості" об'єктів над лінією горизонту. Такі дослідження виконують із розташуванням сенсорів вимірювальних приладів переважно на висоті над поверхнею Землі безпосередньо у товщі атмосферного шару. Подібні вимірювання також потрібні при проведенні екстрених пошукових та рятувальних операцій, де по одиничних оптичних спалахах або коротких сеансах активності аварійного радіообладнання чи специфічних акустичних шумових сигналах у непрогнозовані часові інтервали необхідно максимально точно визначити напрямок (пеленг) їх сприйняття та можливий характер можливого досить швидкого переміщення в горизонтальній площині виявлених об'єктів. Тут нагальна потреба в отриманні досить великих масивів узгоджених даних одночасних вимірів миттєвих величин у швидкоплинних процесах з проявами відмінного фізичного змісту (радіохвильового, оптичного та акустичного) від значної кількості паралельно діючих давачів з мінімальною затримкою у часі може бути викликана унікальними обставинами нестримних природних явищ чи техногенних руйнівних процесів, коли фактор трудомісткості вимірювань та часу на обробку потрібної для класифікації альтернативних ситуацій кількості послідовно отриманих результатів впливу довкілля на сенсори може бути критичним для ефективної організації рятувальних заходів та якості подальших дій. В будь-якому типовому застосуванні при вирішенні періодично виникаючих задач екологічного моніторингу такі вимірювання мають бути проведені із мінімальним ризиком ушкоджень для людей та інфраструктури, що знаходяться на приповерхневих висотних рівнях поблизу об'єктів дослідження за умови завжди забезпечувати повний комплекс одночасно отриманих сумісних даних та відносно низькі витрати фінансових і матеріальних ресурсів для організації кількох серій із послідовно виконуваних як планові достатньо дорогих натурних експериментів, які передбачають фіксацію швидкоплинних змін фізичного стану чи розташування окремих об'єктів спостереження чи їх складових. Системи з названими якостями проектують як такі, що забезпечують високий рівень готовності, оперативності налаштувань та достовірності даних, належну надійність та ремонтопридатність технічних засобів в умовах обмежених сервісних ресурсів, що загалом дозволяє їх використання у так званих "важких" умовах експлуатації для гарантування потрібного рівня метрологічного забезпечення та інших видів інформаційного обслуговування визначеного кола процесів отримання інформації реального часу в межах визначених завдань. За характером місця проведення таких експериментів вони найчастіше постають віддаленими від постійних джерел електроживлення, відбуваються у будь-який час та за різних погодних умов. Конструктивне забезпечення експериментів та використане інше приладдя перебувають в екстремальних погодно-кліматичних умовах із кількох діючих повсякчасно несприятливих факторів, включаючи прямий нагрів сонячними променями, інтенсивний обдув забрудненим повітрям, проникнення атмосферної вологи, значні лінійні та кутові прискорення із швидко змінюваним напрямком їх вектора тощо. Усе це значно підвищує ризики суттєвої фрагментації достовірних даних у масивах їх сполучених послідовностей. Для уникнення проявів такого в цій системі прийняті спеціальні структурні та конструктивні заходи. Важливою особливістю саме запропонованої системи є функціонально та конструктивно передбачена як основна експлуатаційна можливість цілком автономної роботи в автоматичному режимі із достатньо швидким самостійним переміщенням усього комплексу сенсорів давачів у межах кутових позицій в площині із визначенням азимуту спостереження. Такі умови є попередньо запрограмованими для вимірів у визначеній множині точок в межах 1 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 досліджуваного просторового обсягу, але насамперед під час достатньо швидкого циклічного обертання утримувачів самих сенсорів на довільну кількість повних кіл у площині, яку можливо змінювати в межах гострого кута відносно лінії горизонту. Крім цього передбачено наявність діючих засобів для слідування цієї системи як закінченого виробу трасою маршруту у заданому просторі по певним лініям (ізолініям), де один із визначених вимірювальних параметрів, наприклад, інтенсивність сигналу, що надходить від обраного об'єкта дослідження, зберігає близьке до постійного значення, яке програмно встановлене за певними ознаками, у тому числі і такими, що є оперативно виробленими та зафіксованими завдяки здатності до адаптації. Також відмінністю даного технічного рішення є реалізована можливість досягнення необхідного у кількісному вимірі числа задіяних у процесах автоматичних вимірів спеціалізованих давачів із сенсорами різного типу для створення повнофункціонального діючого технічного комплексу, що може включати метеорологічні, радіологічні та хіміко-токсикологічні засоби визначення параметрів довкілля. Підключення додаткових малогабаритних вимірювальних блоків та автономних геофізичних приладів чи інших функціональних пристроїв при діагностичному дослідженні довкілля в приповерхневому повітряному шарі стає досягнутим в режимах із прикріпленням до троса підвісу транспортуючого повітряного судна, або ж навпаки, при тимчасовому встановленні на верхівці вежі, конструктивному підвищенні на даху капітальної будівлі, башти чи на іншій висотній споруді. Таке розташування сенсорів суттєво розширює діапазон вимірюваних величин та кількість паралельно оброблюваних видів змінних параметрів при досягненні найвищих показників по точності та швидкодії обробки даних. Сучасні інформаційно-вимірювальні системи, як відокремлені компоненти у комплексах більш складних і розгалужених телеметричних систем, обов'язково мають канали зв'язку, що автоматично згідно із діючою програмою роботи розподіляють і направляють сигнали від сенсорів давачів у напрямку до засобів для їх послідовної обробки та оперативного накопичення, а також відображення інформації в спеціально розроблених екранних формах і друкованих протоколах. Задіяні в них мікропроцесори як пристрої широкого кола застосувань є заздалегідь пристосованими ефективно працювати в подібних засобах автоматизації вимірювань та трансляції необхідних обсягів даних за умови створення функціонально достатніх та надійних структур зв'язків між приладами, що дійсно відповідають особливостям експлуатації. Більшість відомих інформаційно-вимірювальних систем, що використовують мікропроцесори як ключовий компонент програмного керування засобами цифрових вимірювальних перетворювань, мають як базове технічне рішення для передавання цифрових кодів застосування як спільного каналу зв'язку реверсивної "загальної шини". Це технічне рішення дуже добре зарекомендувало себе в абсолютній більшості обладнання, що є наземним та встановлюваним стаціонарно. Воно забезпечує інформаційну досяжність до будь-якого із давачів системи з його сенсорами із мінімальними витратами технічних ресурсів, задовільним часовим інтервалом очікування трансляції даних та відносно простою дисципліною організації доступу. Відомими прикладами є пристрої з HP-Bus [1, 2], крейтом КАМАК (САМАС) та інші. Давачі як обов'язкові складові в такій системі є підключеними безпосередньо або через керований комутатор до досконалих вимірювальних перетворювачів типу "аналог-код", а вони в свою чергу з'єднані з мікропроцесорами [3], що в такій структурі, окрім іншого обладнання, мають інтерфейсні пристрої для взаємодії із засобами організації системних каналів зв'язку. У найбільш сучасних варіантах виробів цього типу пристрої найчастіше є лише доповненими технічними засобами використання інтерфейсів до інших вживаних у приладобудуванні каналів вже для зіркоподібного об'єднання окремих пристроїв чи їх збірок, як наприклад, ЕІА RS 485 [4] чи USB 2.0, або навіть USB 3.0 [5], що вже став новим стандартом та достатньо широко доступний для підключення швидкодіючих пристроїв. Але принциповий недолік будь-якої структури як "загальної шини" - послідовний характер обслуговування через такий канал для з'єднаних інформаційних системи та висока імовірність блокування усіх інформаційних обмінів в разі виходу з ладу лише одного канального контролера, який постав у стан, коли він потребує обслуговування, залишився неподоланим у більшості практичних реалізацій. Натомість окремого значення набули пристрої та вбудовані засоби доступу до мережевих каналів зіркоподібних структур, наприклад, із дисципліною Ethernet 10/100/1000 [6]. В системах з підтримкою локальних мереж, коли особливо за протоколом TCP/IP для обміну блоками даних в доменах Internet досягнуто функціональної незалежності в роботі устроїв як передавачів та приймачів, подібно до дисципліни, що передбачена в найбільш перспективних застосуваннях усе більше поширених із часом "хмарних технологій" (cloud computing; CTIS-Cloud Technologies of Information Services: Software-as-a-Service, Platform-as-a-Service, Infrastructure-as-a-Service) [7]. Суттєвим, при цьому є те, що із таким підходом в єдиному інформаційному комплексі 2 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 виступають об'єднаними в єдине ціле як точні вимірювальні перетворювачі, так і досконалі зв'язкові засоби інтеграції підсистем до глобальних мереж [8]. Завдяки методам мікромініатюризації при створенні складових каналів (інтерфейсних контролерів) та вимірювальних перетворювачів високого класу точності ці ж структурні одиниці є зменшеними до таких фізичних розмірів, що дозволяють будувати на їх основі дійсно портативні вузли та вироби [9]. Саме портативні спеціалізовані вимірювальні та керуючі прилади стає можливим застосувати як засоби для авіоніки [10] щоб їх розташовувати безпосередньо на борту різноманітних літальних апаратів, коли вагові та габаритні показники стають вирішальними поряд із рівнем енергоємності. Виключно значним є крок в досягненні справжньої портативності надвисокочастних та багатьох інших мікрохвильових зв'язкових систем, сучасним прикладом чого можуть бути розміри та функціональна здатність сучасних смартфонів [11], які підтримують у автоматичному режимі роботу в кількох стандартах стільникових мобільних систем передачі даних та готові до здійснення потужної внутрішньої обробки інформаційних потоків, що складають, наприклад, мультимедійний контент [12]. Однак їх реальні оцінки готовності до роботи та загальної надійності тут і досі у більшості форм і конструкцій цифрової техніки залишаються недостатніми для тих сфер застосування, де головними постають вимоги до часу реакції, продуктивність паралельної обробки інформації від кількох десятків джерел інформації та практичне виключення ситуацій із так званими "зависаннями" [13] при роботі програмних засобів та хоча б частковими відмовами апаратної частини. Серед іншого для сучасних складових розгалужених спеціалізованих систем спостереження виключною вимогою є безупинність роботи та дійсно круговий огляд відносно до периметра простору, де можуть відбуватися процеси чи з'явитися об'єкти, стосовно яких оперативними дослідженнями комплексу характеристик слід без зайвої затримки з'ясувати категорію приналежності та прогноз можливих критичних станів або ушкоджень як наслідків їх появи в "полі зору" [14]. Для охоронних систем, що є одним з видів систем безпеки об'єктів, де вказані вимоги теж постають ключовими, як правило досить чітко визначені границі охоронного периметра та особливості кутів видимості при спостереженні. Крім цього, в основному відомі швидкості переміщення у просторі [15] та маса фізичних об'єктів потенційного вторгнення. Відомо багато прикладів раціонального розміщення відеоматриць з підібраними об'єктивами, давачів руху та радіо- чи акустичних імпульсних засобів тестування відбиваючої здатності середовища в межах гострих кутів у встановленому азимуті разом із захищеними безпровідними лініями комунікацій, і це стає цілком достатньо для задовільного обслуговування внутрішніх приміщень чи навіть обмежених надійною огорожею надвірних територій. У зовсім інших умовах мають працювати системи так званого "загального" спостереження, наприклад, покликані вчасно виявляти осередки загоряння на полях, в степу, на торф'яниках, а тим більше у лісових масивах. Для вирішення таких задач вже розроблені відповідні теоретичні підстави [16] та розвинена апаратна база, що включає поряд з авіаційними ще й супутникові системи. Тут час виявлення, визначення напрямку та класифікації події є критичним як за числовим виміром, так і за точністю розпізнання та обчислення показників динаміки розвитку ситуації, що стрімко змінюються. Граничними можливостями по роздільній здатності та мінімальному часу існування досліджуваного об'єкта в полі зору системи спостереження мають військові контрбатарейні радіолокаційні системи [17]. Характерною особливістю їх типової конструкції [18] є "віяло" з кількох радіолокаційних спрямованих антен або ж поворотна площина у вигляді складного комплексного блока із фазованою антенною решіткою. Очевидно, що така базова конструкція антени радара як сенсора взаємодії з довкіллям забезпечує спостереження хоча і в межах досить широкого розгорнутого кута, але ж лише за умови раніше встановленого основного напрямку спостереження, що є заданим головним азимутом як постійним налаштуванням. Іншим прикладом ефективного обладнання такого призначення є переносна система AN/TPQ-48(V)2A виробництва фірми SRC (Syracuse Research Corporation) США, до складу якої входять антенна система кругового сприйняття з приймачем та передавальним пристроєм і швидкодіючий процесор цифрової обробки отриманих радіолокаційних сигналів. Разом ці частини встановлені на триопорному штативі, а також комплексі є окремий виносний портативний комп'ютер оператора, який можливо віднести в укриття на відстань до 1 км від антени, яка може бути обстріляною супротивником. Для живлення комплексу, що важить менше 30 кг достатньо моторного генератора потужністю біля 1 кВт [18]. Для спостереження у небесній півсфері по колу є екземпляри відповідних дійсно унікальних споруд із трьох, чотирьох або шести велетенських антенних решіток, розташованих по гранях призми [19]. Безумовно, про мобільність тут не говорять. За іншою концепцією для виявлення 3 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 швидкісних літальних апаратів як цілей наступного спостереження, що можуть з'являтися із будь-яким пеленгом відносно іншого літака-розвідника, що несе систему оповіщення, широко відомі конструкції унікальних за характеристиками повітряних суден, що були розроблені ще на початку 60-х років в СРСР - комплекс радіонавігаційного обладнання "Ліана" [20] на борту Ту126 як модифікація велетенського Ту-114, та діючий до тепер носій антен системи AWACS (США) [21]. Окрім надпотужного електрогенератора для живлення радарного устаткування, ці літаки вирізняються громіздким диском над фюзеляжем, де розташована система спрямованих антен, які у польоті здатні обертатися на повне коло лише за кілька десятків секунд, забезпечуючи таким чином круговий огляд навколишнього простору. Виходячи із розмірів перших діючих зразків таких літаків очевидною була тенденція до суттєвого зменшення обладнання, що знайшло відгук в реальній конструкції літального апарата АН-71, виконаного за розробками КБ "Антонов" [20], та відомого поки що як проект, але він вже є на стадії експериментально-дослідницької роботи у Китаї [22], котрий вважають таким, що випередив сучасні аналоги із США та Європи. Однак фізичним обмеженням для ефективної мініатюризації таких конструкцій постає досить велика дистанція, на якій має бути виявленим цільовий об'єкт, а також його відбиваюча здатність та швидкість у змінах кутових координат в зоні спостереження. Малогабаритні цілі у вигляді протиповітряних ракет, які рухаються із "мертвої зони" спостереження по крутій траєкторії (майже вертикально) або ж під гострим кутом у площині назустріч напрямку обертання антенної установки, за час їх підльоту до неї подібна система спостереження практично не фіксує через принципові обмеження у її реальній конструкції. Тому й використовується літальний апарат як носій спеціалізованого громіздкого обладнання виключно поза зоною імовірного ураження за лінією зіткнення на відповідно достатньо великому віддаленні від епіцентру подій, що безумовно зменшує ефективність в оперативній обстановці як вимірювального засобу реального часу. Для відпрацювання завдань, наприклад, радіоспостереження безпосередньо у колоні ударних вертольотів розроблено систему на основі Sikorsky UH-60 Black Hawk [23]. Саме обладнання YEH-60B спрямовано швидко виявляти засоби протиповітряної оборони, a MH-60G з його метеорадаром та іншими НВЧ радіосистемами спеціалізовані для рятувальних операцій. Як і SH-2F для системи LAMPS Mk.l (Light Airborne Multipurpose System) на базі вертольота UH2A із доступним навантаженням у 1814 кг - усе це досить великі та дуже дорогі повітряні транспортери із обов'язковими відповідними наземними засобами експлуатаційного забезпечення. При цьому як на землі (чи на кораблі), так і на борту самого літального апарата в роботі по виконанню оперативних спостережень обов'язково задіяні одночасно у сумі більше десятка фахівців. Прикладом безпілотних засобів спостереження, що досить стрімко зайняли свою функціональну позицію серед технічних засобів, стали крилаті літальні апарати (БПЛА) із загальною назвою "дрони" [24]. Сучасний парк таких засобів спостереження став дуже широким, хоча і не змінив принципово свого початкового призначення. Фізичні показники сучасних безпілотних літальних засобів лежать у достатньо широких межах: від геометричних розмірів у три-чотири рази більших за бойовий винищувач чи близьких або менших за нього [25] із збереженням основного типового оснащення. Якщо "великі" БПЛА в основному обладнані бойовою системою ураження (включаючи лазерну) та відповідними засобами виявлення та супроводження цілей, то "малі" (із розмахом крил у 2…5 метрів) і особливо зовсім мініатюрні дійсно орієнтовані в основному тільки на оптичний огляд поверхні з висоти пташиного польоту (до 2000 м) та сканування частот радіохвильової активності. Типовими серед них є вітчизняні зразки: безпілотний літальний апарат контейнерного старту багаторазового застосування "Сокіл-2", призначений для ведення розвідки в режимі реального часу з можливістю запам'ятовування та наступного перегляду відеоінформації, а також А-3 "Ремез", який призначено для економічного вирішення цивільних задач спостереження, наприклад, оцінки пожежної чи паводкової ситуації в межах видимості на 5…15 км з часом перебування у повітрі цього 9 кг апарата безперервно до 2 годин. Презентовано навіть безпілотника-поженого [26], що має штучний "інтелект" обходити аварійно небезпечні зони інтенсивного полум'я. Однак усі названі зразки БПЛА як і більшість інших мають сенсори, що переважно спрямовані по курсу польоту чи відхиляються для спостереження у бокових напрямках в обмежених границях обзору за допомогою окремої керованої системи обертання у просторі кутових координат, як це видно на фотографії головної частини Boeing Insitu RQ-21A Blackjack [27]. Така ж особливість притаманна й іншому класу малогабаритних автономних літальних засобів для відеозйомки, відомих як мультироторні літальні апарати чи квадрокоптери [28]. Для зміни кутового положення корпусу такого літального апарата разом із апаратурою 4 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 спостереження потрібно виконати політ по дузі кола, хоча і значно меншого радіуса, ніж для крилатого засобу. Інший спосіб маневру із зміною курсу без зрушення з позиції зависання є характерним для центрально роторних машин, відомих як гелікоптери або гвинтокрили. Серед них особливе місце займають достатньо складні літальні апарати із конструкцією суміщених на одній геометричній осі двох роторів, типовим прикладом яких є машини Ка-25 (Ка-27) та Ка-50 [29]. Такі транспортні засоби мають теоретично найвищі показники кутової маневреності і стабільності положення корпусу при зависанні в заданій точці над поверхнею за рахунок технічної можливості досконалого керування зміною кута постави кожної лопаті для обох роторів [30]. В реальності таке досягнуто використанням достатньо вразливої як для зовнішніх ушкоджень механічної важільно-тягової та обертальної кулісної системи із ковзаючими каретками при зміні кута атаки лопаті ротора (для подвійного "перекосу") залежно від її поточної позиції відносно корпусу судна під час виконання будь-якого одиничного оберту [31]. Проблеми, що викликані великою кількістю рухомих обертових з'єднань, не знайшли задовільного вирішення навіть при застосуванні так званої реактивної лопаті із соплом, закріпленим на її зовнішньому закінченні [32], коли струмінь газу із великою швидкістю витікання може не тільки її розкручувати навколо осі, спрямованої через центр маси повітряного судна, але також коливально та синхронно відхиляти на певний кут відносно повздовжньої осі самої лопаті, наприклад, завдяки періодичній зміні важелями векторів механічних сил [33] або ж примусово під дією дистанційних сервомеханізмів від електромеханічної системи керування курсом і набором висоти підняття. При цьому подовження лопаті та її профіль [34] з урахуванням діапазону допустимих змін кута атаки та циклічності руху у просторі створюваних струменів зовнішнього газового середовища відіграють вирішальну роль у досягненні необхідних варіацій спрямування тягових зусиль і, як наслідок, загальної стабільності руху корпуса, оснащеного приладами спостереження. Саме поліпшення показника стабільності поряд із забезпеченням необхідної керованості та із одночасним суттєвим спрощенням приводів механізмів постало значним технологічним проривом при використанні квадрокоптерів як базової платформи для створення практичного пристрою за призначенням "літаючої камери" [35]. Хоча постійні спроби об'єднати переваги крилатих та гвинтокрилих машин для транспортування апаратури спостереження кожного разу надають нові приклади оригінальних реалізацій з боку літальних апаратів першого типу, що забезпечують найбільш стабільний і швидкий прямолінійний пліт, але не втрачають здатність для короткого злету (завдяки зміні положення самого крила) [36], чи конвертипланів (Sikorsky S72) на основі несучого Х-гвинта [37], який може бути заблокованим для обертання із лопатями у положенні найбільшої створюваної ними аеродинамічної сили під час горизонтального польоту. При цьому навіть значне збільшення кількості "малих" роторів як у літаючому "скейборді" [38], а також форми їх розташування на корпусі досі не вирішили проблеми потрібної горизонтальної і курсової стабільності саме під час маневру керованого вертикального злету хоча б на рівні, що є подібним для апаратів із змінюваною питомою вагою обсягу їх оболонки - аеростатів (газонаповнених воднем або гелієм, або ж інших - повітряних термічних монгольферів). Нестабільність положення платформи з приладами при висотних маневрах без спеціальних додаткових пристроїв збереження орієнтації здатна призводити до тимчасової втрати у вузькому полі зору сприймаючого приладу поточного відображення об'єктів спостереження, особливо при їх малих кутових розмірах чи невеликій відмінності яскравості від фону, коли автоматичне супроводження є проблематичним через перешкоди видимості (як то задимленість) чи особливості зміни швидкості та напрямку руху. Серед шляхів пошуку при розв'язанні означеної проблеми вже виявилися спроби створення дископодібних апаратів із аеродинамічним профілем, який не має суттєвих відмінностей по колу (у полярних координатах із спільним з екіпажною частиною геометричним центром). Поряд із явно фантастичними (як на цей час) пропозиціями вже існують практичні технічні рішення [39], які покладені в основу цілком сучасних і патентоздатних рішень [40], у тому числі придатних для натурних випробувань космічної техніки [41] і тих, що вже виведені на рівень діючих моделей та очікують серійного виробництва. Рекламують "літаючий робот" [42] цікавий тим, що тут лише один і дуже простий по конструкції ротор закрито зовні безпечним корпусом із рухомими коробами-каналами для керованого пропуску маси повітря, яка при витіканні створює підйомну та тягові складові рушійної сили, і саме вони зміщують виріб у просторі за вкладеною у його мікропроцесорний керуючий вузол робочою програмою. Оснащення відеокамерою, як вказувалося раніше, є цілком слушним заходом, а от оголошений в складі переміщуваних вимірювальних приладів чутливий магнітометр, що є розташованим у корпусі та безпосередньо поряд із достатньо 5 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 потужним електродвигуном в загальному обсязі за розмірами "футбольного м'яча", для відстані в 0.7…2 метри від досліджуваної поверхні - це постає лише демонстраційною "іграшкою", як і досягнута поки що фактична можливість утримуватися у польоті навіть без вантажу та в умовах закритої зали не більше 10 хвилин. Таке підтверджує принципову можливість, але принижує надбану функціональну здатність подібного виробу як вимірювального пристрою, що має бути застосований у відкритому просторі, наприклад, в разі ефективного металошукача при визначенні траси підземного трубопроводу. Пояснення для цього факту є досить очевидним - класичний електродвигун із звичайним (за фотографією) пропелером та "тісними" тунелями для розщеплення на чотири частини і пропуску саме таким чином усього обсягу прискореного повітря завдяки втратам його потужності за надмірним тертям та інші витрати енергії (і заряду дорогої батареї акумуляторів) через невідповідну аеродинаміку корпусу постають найгіршим варіантом практичної реалізації цієї гарної ідеї як спеціалізованого літального апарата. Більш вдалим прикладом послідовності трансформацій у запропонованих конструкціях безпечного літального апарата може слугувати останній (як на цей час) варіант мініатюрного, але досить потужного дрона як "повітряного транспортера" фірми AMAZON [43], де один практично відкритий несучий горизонтальний ротор доповнено частинами рами його корпусу, що слугують іншими аеродинамічними площинами для створення підйомної сили, та керуючим пропелером тяглової складової для маневрування і достатньо швидкого горизонтального переміщення по трасі на заданій висоті. Вочевидь постають потрібними нові реальні заходи, що мають принципове значення для поліпшення якісних показників таких видів виробів у застосуваннях як повітряних носіїв точних вимірювальних приладів. В цьому плані з появою відносно легких акумуляторів став остаточним вже визначений раніше відхід від теплових двигунів з хімічним перетворенням енергії шляхом окислювальних процесів у різних видах палива в напрямку до більш сучасних і спеціалізованих електромеханічних перетворювачів для отримання механічної потужності, де в першу чергу досягнуто дійсно ефективної та цілеспрямованої взаємодії магнітних полів у середовищі дрібнодисперсних феромагнітних структур разом із застосуванням керованих безконтактних комутаторів струмів збудження електромагнітів. Тут в цілому стає досягнутим конструктивно близьке до теоретично граничного прогнозованого рівня використання маси матеріалу двигунів [44] та ємності джерел живлення для забезпечення необхідних (особливо при вертикальному злітанні апарата) питомих співвідношень пікової потужності та ваги екіпажної частини. При цьому сама конструкція електродвигунів має бути найбільш адаптованою для приводу до руху саме визначених видів елементів аеродинамічних площин у складі апарата - як активних, що саме формують опорні струмені повітря, так і пасивних для використання різниці швидкості та тиску на поверхнях для динамічного керування без зайвого штучного гальмування потоків через надмірне тертя на зламах форми у межах корпусів та інших замикаючих обсяг стінках повітряних тунелів. І такі розробки поки що як прототипи вже досягли всесвітньої виставки досягнень в галузі електроніки CES в Лас-Вегасі (січень 2016 p.). За даними виробника з Гуанчжоу (КНР), електричний квадрокоптер Ehang 184 [45] вагою в 200 кг здатний досягати висоти у 3000 м при швидкості руху в 100 км на год. Характерним також є повна автоматизація керування апаратом без пілота із вантажем чи одним пасивним (!) пасажиром, яке виконується, наприклад, за допомогою планшетного комп'ютера Microsoft Surface із спеціальним програмним пакетом для його операційної системи. Завдяки такому технічному рішенню зовнішня як певний технологічний додаток до гнучкої несучої конструкції самого літального апарата і органічно вбудована та сполучена з ним через рухомі деталі механізмів керування система комп'ютерного (мікропроцесорного) забезпечення стабільності польоту набуває здатності дійсно швидко та в повному обсязі компенсувати виявлені відхилення у поточній позиції апарата в просторі, швидко протидіяти релаксаційним та резонансним коливанням в межах елементів тонкостінної оболонкової конструкції. Але головне у цьому призначенні - із мінімальним запізненням відносно часу отримання сигналів від вимірювальних давачів та алгоритмічних аналізаторів саме вона із виробленими сигналами керування має повертати увесь корпус апарата як носія апаратури спостереження навколо будь-якої з локальних геометричних осей для надійного утримання виявленого об'єкта в точці "перехрестя" ліній прицілювання, доки не будуть закінчені хоча б головні розпізнавальні операції для визначення приналежності такого віддаленого об'єкта до категорій розшукуваних чи потенційно небезпечних, а з плином часу також потім визначені усі деталізовані параметри як результат програмованої послідовності дистанційних вимірів. При цьому стає недостатнім наявність механічних приводів, що здійснюють лише обертальний рух роторів, хоча із 6 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 оперативно регульованою швидкістю чи навіть кутом їх обертання у межах більших за один оборот як у поширених в автоматиці видів крокових імпульсних електродвигунів. На цей час є добре відомими керовані електричними сигналами механізми не тільки обертального, але і повздовжнього переміщення - так звані "лінійні двигуни" [46] у тому числі і для рухів на інструментальній площині, де вже досягнуто субмікронної лінійної точності постави каретки завдяки надшвидкісному (порівняно із впливом інерційної маси прискорюваних рухомих частин) динамічному коливальному режиму. Для формування і подальшої взаємодії із статичними полями в складній системі постійних магнітів найчастіше використано металевий [47] або більш технологічний керамічний діелектричний феромагнетик з великою коерцитивною силою в стані фіксованого намагнічування, та з другого боку з метою керування їх рухом вжито цілеспрямоване змінювання за напрямком і силою електричний струм через котушки, магнітопроводи яких виконані з магнітом'якого матеріалу, найчастіше керамічного із мінімальними порівняно із шихтованим втратами енергії на збудження замкнених локальних вихрових струмів Фуко. Уся така площинна чи у перерізі коробчаста (або трубчаста, що охоплює весь стрижень штока) конструкція [48] моторного модуля спрямована в першу чергу для компенсаційного балансування ваги і стабілізації зазорів у суміщених поверхнях (магнітна левітація) рухомих частин та їх контрольоване лінійне переміщення в просторі з чітким дотриманням координат. Стосовно до самих засобів спостереження виходить, що нагальна на цей час вимога створення малогабаритних засобів отримання достатньо точних вимірів трасових показників для об'єктів, що мають мінімальну відбиваючу здатність, дуже швидко рухаються в повітрі та можуть бути розпізнаними по площинному оптичному контурі як цятку видимістю у чверть кутового градуса, або ж яким-небудь іншим частковим ознакам, як то незначна відмінність яскравості плями від фону, своє генероване чи відбите мікрохвильове радіовипромінювання та навіть характерний акустичний шум, має усі об'єктивні ознаки бути задоволеною з боку існування окремих загальних конструктивних прийомів, а також наявності відповідних інших забезпечень, наприклад, матеріалів з потрібними якостями, способів їх обробки та з'єднання в нерухомі та рухомі блоки. При цьому виглядає необхідним, щоб для розширення горизонту, в межах якого мають бути виконаними названі спостереження, сенсори вимірювальної частини системи були програмовано піднятими на певну висоту хоча б до кількох сотень метрів, де вплив висотних споруд та підйоми профілю земної поверхні вже не відіграють ключової ролі як екрани сприйняття на деяких напрямках. Також дуже важливо, щоб самі утримувачі сенсорів мали знаходитися у стабільно визначеному стані, який має бути достатнім для гарантування вчасного погашення осьових чи просторових коливань, інших механічних вібрацій тощо завдяки засобам комп'ютерної обробки первинних сигналів, які надходять безпосередньо від давачів. Маючи на увазі зазначене принциповим рішенням виглядає оснащення дійсно малогабаритного та вузькоспеціалізованого автоматичного літального апарата гранично швидкодіючими пристроями для вимірювання параметрів довкілля у будь-якому напрямку в межах повного кола за умови забезпечення його перебування на висоті у визначеному місці простору та у якісно стабілізованому стані з погляду випадкових змін локальних координат протягом достатнього часу (на рівні однієї-двох годин), наприклад, до поки його не замінить у цій позиції спостереження аналогічний черговий виріб як засіб автоматичного отримання оперативної інформації найбільш широкого фізичного змісту. Реально вже маємо дуже різке зменшення розмірів та ваги приладдя, що є потрібним для виконання множини базових функцій програмованого чи адаптивного спостереження та одночасного керування польотом. Таке стало можливим завдяки суттєвому поліпшенню головних якостей спеціалізованих електронних компонентів, їх глибокій сумісній інтеграції у вигляді закінчених широкодіапазонних приладів, достатньо універсальних конструктивних модулів і окремих пристосувань, а також відповідне зниження ваги джерел живлення, які й досі складають біля половини геометричного обсягу та до двох третин ваги порівняно із функціональними пристроями. Прикладами вже існуючих виробів можуть слугувати відеокамери спостереження із надвисокою роздільною здатністю, подібні до тієї, яка має в галузі найменшу за геометричними розмірами матрицю у 13 мегапікселів [49] із максимальною швидкістю формування повного зображення у 120 кадрів на секунду, і вона займає менше чверті кубічного сантиметра. Це означає, що коли матриця оснащена "нормальним" об'єктивом із кутом охоплення поля зору біля 45 градусів (1/8 повного кола) на формування кругової панорами з восьми кадрів знадобиться усього 8/120 або 1/15 секунди (близько 66 мілісекунд). Тоді гіпотетичний механізм для кругового спостереження, який гарантує циклічне та стабільне обертання навколо центральної вертикальної осі для такої матриці з її об'єктивом як давача у вигляді відеокамери, 7 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 може рухатися із кутовою швидкістю до рівня у 900 обертів на хвилину. А це кутова швидкість, що порівнювана із обертанням ротора невеликого гвинтокрила, тоді як для роторів квадрокоптерів цей показник кутової швидкості постає у 3….8 разів більшим. Вже виготовлено фірмою NanoLambda оптичний спектрометр у формі мікрочипа [50], що має розмір усього 552 мм. Як інший приклад діючого мініатюрного оптичного сенсора для інфрачервоного діапазону виступає виріб ESA Proba-V бельгійскої компанії Xenics [51], що його з успіхом вже використовують для дослідження відбиваючої здатності смуги рослинності на Землі завширшки у 1400 миль, коли супутник огинає на орбіті її поверхню. Для сприйняття й вимірювання потоку електромагнітної енергії, у якому довжина хвилі є не набагато більшою за інфрачервоне випромінювання, розроблені мікромініатюрні елементи як активні антенні пристрої з випрямлячами [52], що загалом мають дуже високий рівень ефективності перетворення у струм мікрохвильових енергетичних процесів і здатні в наборі з кількох сотень тисяч навіть підживлювати силові акумулятори. Іншим сучасним прикладом, але наземного стаціонарного засобу радіоспостереження є South Pole Telescope (SPT) [53], спрямований у небесну півсферу на Південному полюсі Землі для дослідження реліктового мікрохвильового випромінювання із космосу. Характерною ознакою його сенсорів є набір площин у вигляді кремнієвих інтегрованих мікроелектронних активних антен. Саме це забезпечує унікальну чутливість у вибраному напрямку, цілком достатню для виконання наукових досліджень. Про інформативність сучасних методик, які ґрунтуються на цілеспрямованому аналізі викривлень, що виникають при розповсюдженні стандартизованих мікрохвильових потоків із зв'язкових сигналів маємо отримати уяву через вже досягнуту можливість визначити кількість та положення людей у закритому приміщенні за стіною будівлі [54] через послідовні виміри при сприйнятті сигналів від працюючої там цифрової мережі Wi-Fi (нижній діапазон несучої 2.4 ГТц, а довжина чверть хвильового диполя найпростішої антени тут складає біля 30 мм). Зниження ціни (до 5 доларів за процесорну одиницю [55]) та їх розмірів (мікрочип закінченого комп'ютера обсягом усього 4…8 куб. міліметрів [56]) для промислового мікропроцесорного обладнання при постійному підвищенні його обчислювальної потужності завдяки освоєній 22 нм та переходу до 14 нм промислових мікротехнологій, коли вже зараз є 10 обчислювальних ядер в одному модулі мікропроцесора для багатоканального зв'язкового пристрою [57], відкрило широкі перспективи для реалізації надмініатюрних виробів, складених із давачів разом з обробляючим поточні сигнали цифровим обчислювальним комплексом у вигляді однієї пластини з кераміки із кількома інтерфейсними периферійними мікроконтактами [58], де їх загальний габаритний розмір тепер цілком залежить тільки від хвильових особливостей зовнішнього сигналу, наприклад, як у мініатюрному промисловому модулі достатньо чутливого GPS приймача компанії OriginGPS, орієнтованого на встановлення у мобільних приладах. За цих умов цілком реальною виглядає сприйняття та обробка таких сигналів із довкілля, які раніше дуже важко було виділити на тлі різних за характером маскуючих їх шумів чи взагалі сприймати через відсутність спеціалізованих сенсорів. Це в першу чергу стосується акустичних процесів, наприклад, у повітрі, які досить швидко затухають та змінюють властивості із збільшенням відстані до джерела, а також точні виміри градієнта радіаційної складової з урахуванням напрямку надходження іонізуючого випромінювання, особливо коли джерело чи приймач рухомі. До останнього часу чутливі до напрямку надходження переважно сцинтиляційні детектори випромінювання разом із обчислювальним комплексом для проведення рентгенотомографічних досліджень були дуже громіздким стаціонарним обладнанням, але вже сучасні розробки переважно новітніх багатошарових плівкових структур [59], що у поєднані із вбудованими напівпровідниковими підсилювачами оптичних спалахів для генерації пропорційних електричних сигналів, зменшилися у кілька сотень разів і дозволяють їх застосування у мобільній апаратурі. В такому призначенні особливе місце здобуло приладне забезпечення для натурного дослідження робочих місць, виробничих площ, а також місць постійного зібрання людей та вимірювання там іонізуючого потоку з визначенням або самого джерела, або хоча б переважного спрямування на нього (чи до кількох різних точок) у шляху надходження такого виду найшкідливішого за наслідками прихованого забруднення [60] довкілля. Виходячи із фактично існуючої тенденції з одного боку - до збільшення переліку видів джерел і їх просторового розміщення (від плям на звалищах відходів до деталей технологічного устаткування, наприклад, у системі водоканалу), а також з другого боку - до розширення діапазону інтенсивності потоку від випромінюючих часток (починаючи з одиниць 8 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 кілоелектронвольтів і до десятків мегаелектронвольтів), потреба у приладах оперативного вимірювання швидко зростає, та і сам арсенал засобів для твердотільної дозиметрії [62] стає все більш розвиненим та досконалим. Але серед детекторів все ж превалюють ті, що побудовані на засадах перетворення генерованих іонізуючими частками оптичних процесів - у вигляді коротких спалахів, чи навпаки, тимчасової втрати прозорості для поляризованого світла у чутливій плівці - в електричні явища на вихідній стороні давача [63, рис. 1], саме наслідки яких вже в подальшому підлягають цифровій обробці як типові сигнали в електричних колах. Спільною та негативною рисою у радіаційних, багатьох радіотехнічних та акустичних малогабаритних сенсорів є їх зовсім мала часткова роздільна здатність при визначеннях напрямку, звідки надходить відповідне збудження, коли розгляд ведуть в разі оснащення ними приладів для спрямованого спостереження, а не тільки працюючих на визначення рівня фонової складової. Найчастіше реальний графік просторової кутової діаграми для визначення направленості [64] у полярних координатах "рівень чутливості-кут спрямування" має форму "краплини", що є вкладеною до конуса із розкривом у вершині у межах кута 25…60 градусів (азимут або кут місця) симетрично відносно до центральної лінії його висоти, коли вона є також перпендикуляром до площини у чутливій частині давача. Тобто безпосередньо точний напрямок (з похибкою у 0.2…3 кутових градуси) на об'єкт спостереження можливо визначити тільки шляхом покрокового порівняння поточних амплітуд сигналу на виході давача при сприйняті первинного сигналу вимірювальним приладом, коли подібний сенсор примусово (переважно механічно) періодично змінює орієнтацію коливально чи по колу, проходячи увесь вказаний кут, встановлений за попереднім налаштуванням націленим на можливий генеральний напрямок для надходження шуканого сигналу. Наслідком виходить, що за необхідності сприйняття та вимірювання інтенсивності рівня іонізуючого випромінювання, інфрачервоних променів від площ з нагрітими тілами, мікрохвильової активності, яка не пов'язана безпосередньо з потужним точковим джерелом, а є результатом, наприклад, зовнішнього "підсвічування" і спричиняє розсіяне відбиття із слабовираженим центром його формування, а також хвиль акустичних шумів, якічерез багаторазове відлуння частково маскують напрямок на об'єкти, які його породжують, - усі чутливі засоби сприйняття для вимірювання із визначенням лінії максимуму сигналу мають механічно рухатися у просторі так, щоб їх орієнтація увесь час закономірно змінювалася проходячи біля визначеного напрямку на досліджувані об'єкти. Для підводних ультразвукових сонарних [65] та наземних [18] і повітряних (AWACS) [21] радарних систем, де вузько спрямоване джерело збудження тестового сигналу та антенна система для сприйняття відголоску об'єднані в одній конструкції та рухаються синхронно і діють в одому напрямку, сучасні приклади таких технічних рішень або їх практичних реалізацій у вигляді крупногабаритних оглядових систем є широко відомими, але і вони також в перспективі потребують нових принципових вдосконалень [22]. Натомість для малогабаритних комплексних багатоканальних засобів пасивного оглядового спостереження по кількох фізичних параметрах одночасно подібних до цих прикладів успішних систем практично немає мабуть через виключно різнорідні та одночасно досить високі вимоги до чутливості, роздільної здатності (потужності та інформаційної продуктивності), надійності у режимі безперервної роботи, потрібної їх мобільності, навіть у автотранспортному варіанті [66]. Це стосується також необхідності суттєвого зниження ціни виробничої реалізації та експлуатаційного обслуговування [67], які були би по рівню поточних витрат цілком прийнятними для дійсно широкого як професійного (науково-дослідного), так і громадського (індустріального, моніторингового або навчального) застосування. Дуже яскравим прикладом виключно високої користі інформації, отриманої безпосередньо від багатьох сотень камер спостереження в офісах та на підприємствах, ввімкнених камер відеорегістраторів в автомобілях чи взагалі сенсорів в мобільних телефонах перехожих на вулицях, які змогли одночасно зафіксувати оптичні та акустичні прояви такого унікального космічного явища, як вибух у стратосфері Челябинського метеороїда. Наступні порівняльні дослідження у часовій та просторовій розгортках із даними від стаціонарних постів виявлення сейсмічної активності з усією очевидністю довело, що таке «… дозволило вивчити цю подію більш детально, ніж це зазвичай вдавалося зробити» [68] коли-небудь раніше. Нагальна потреба у створенні дійсно малогабаритних та автоматичних засобів комплексного кругового спостереження є цілком актуальною хоча б з позицій оперативної локації завад чи радіоперешкод зв'язку від мобільних радіо випромінювачів на транспортній базі, яка рухаючись генерує характерний акустичний шум моторного чи колісно-гусеничного знаряддя приводу пересування. Не менш важливим постає одночасне отримання сигналу від теплового чи радіоактивного сліду такого об'єкта, що наприклад без дозволу пройшов через 9 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 закриту аварійну територію, де ще не ліквідовані наслідки забруднення, а тепер сам вже є носієм випадково отриманого небезпечного "вантажу" на екіпажній частині. Про спроби розробити щось подібне у вигляді "літаючої лабораторії" для оперативних досліджень довкілля по кількох параметрах одночасно, а за розмірами придатного для "ручного" запуску у повітря допоки інформація взагалі відсутня. Як доводить аналіз, тут проблема полягає не стільки у браку будь-яких часткових рішень і висвітленні окремих сторін можливих шляхів розв'язання задачі, а в оптимізованій інтеграції та у гармонійному за його технічними ознаками виробі, який надійно і продуктивно об'єднує засоби виконання мінімуму необхідних функцій за умов майже цілковитого виключення зайвих конструктивних утворень, які складають додаткову злітну масу, та інших споживачів непродуктивних витрат енергоживлення. Серед обов'язкових для впровадження у перспективний виріб на перший план виходить добре адаптована, розвинена та надійна багатофункціональна комп'ютерна система, що при досягнутих мінімальних фізичних розмірах блоків здатна як досконало об'єднати розгалужений набір вимірювальних засобів з їх обов'язково коливально чи обертально рухомими утримувачами необхідних сенсорів, так і повністю забезпечити адекватне оперативне керування стабілізованим програмованим переміщенням у просторі за даними поточної обробки координат геопозиціювання самого літального апарата в умовах будь-якої допустимої експлуатаційної турбулентності у масах повітря та відхиляючих його від траси бічних вітрових навантаженнях. Вже відомі пропозиції створення потужних інформаційно-вимірювальних систем, серед яких є багатомашинна мікропроцесорна система із оснащенням у максимальній конфігурації тридцятьма дев'ятьма основними (можливо багатоядерними) мікропроцесорними вузлами [69], де гарантована як базова можливість об'єднати в одній структурно резервованій для забезпечення необхідних для польового застосування апаратної та інформаційної надійності цілком достатнього для реальних вимірів набору потрібних сенсорів. При цьому швидкодія по одночасному отриманню даних вимірів в такій ієрархічній системі порівняно із однорівневою постає збільшеною у три рази із досягненням поточного дублювання отриманих результатів, що надає практичний шлях для оперативного порівнювання усіх даних від різних джерел та наступного алгоритмічного блокування потрапляння до кінцевих масивів окремих технічно недосконалих відліків, які можуть спотворювати результат процесів цифрової апроксимації на окремих інтервалах часу вимірювання. Таке надає гарантію задовільно зберігати функціональну здатність по окремих каналах при вкрай невигідному співвідношенні "сигнал-шум" на виходах первинних сенсорів чи навіть просуваючись далі по ланцюжку обробки аналогових сигналів у блоках адаптивних давачів. Більш складна інформаційно-вимірювальна система, в якій можуть бути фізично об'єднаними за допомогою міжвузлових каналів та логічно зв'язаними через усуспільнені потоки даних вимірювальної інформації дві [70] або суттєво більше окремих автономних систем [71], побудованих за раніше вказаною базовою структурою системи [69], коли вони мають виступати підсистеми в межах однієї "гіперсистеми". Прикладом застосування одиничної системи із базовою структурою [69] для побудови вдосконаленої станції радіоспостереження із точним вимірювання параметрів сигналів за рахунок введенням корекції для визначення фактичного спрямування променю чутливості по рівню діючого струму в котушках керуючих приладів постає пропозиція такої побудови [72], що орієнтована на одночасну обробку отриманих сигналів від кількох окремих груп різнотипних давачів. Також вже маємо приклад застосування досконалої багаторівневої мікропроцесорної "гіперсистеми" [70], що є невід'ємною та органічною складовою у комплексній конструкції малогабаритної "літаючої лабораторії" [73] для автономного дослідження складу та властивостей аерозолів, коли вона у безмоторному режимі у ширяючому самокерованому польоті знаходиться безпосередньо у межах вільно дрейфуючої хмаринки, склад якої треба оперативно визначити. Досліджуваними об'єктами підвищеної небезпеки та негативного впливу на оточуюче повітряне середовище будуть в першу чергу промислові забруднювачі, серед яких є хімічні чи металургійні виробничі комплекси. Особливий ефект від автоматичних вимірів без залучення людей як операторів може бути досягнуто над зонами пожеж, коли виникає значний ризик активації викидів із порушеного звалища відходів чи підпалу торф'яників, або ж у місцях розливу через якусь транспортну аварію летючих хімічних речовин тощо. Відмінністю означеного вище технічного рішення [73] є спроба досягти найбільшої автономності і переважно пасивності відносно до оточуючого повітряного простору, щоб не зруйнувати закономірно сформований висхідними потоками вигляд просторової структури розподілу матеріалу аерозолів та природної концентрації виявлених твердих та газових домішок, де з урахуванням появи можливих отруйних сполук похибка у вимірах і недооцінка їх 10 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 фактичної кількості чи локальної концентрації може мати катастрофічні наслідки. Окрім факультативного оснащення моторними гондолами з найпростішими пропелерами (як у квадрокоптерів), що мають відділятися при досягненні потрібної початкової висоти, тут не передбачені які-небудь інші засоби для створення обертального руху деталей чи важливих блоків Таке є попередньою вимогою функціонування для практичного виключення впливу збурених від пропелерів моторів струменів повітря. При розпізнаванні часток та у визначеннях складу аерозолів із їх прив'язкою до окремих місць загального рельєфу довкілля у відомій системі [73] використано лише жорстко встановлені у межах її рам оптичні сенсори. Тим не менше за характером саме базового оснащення, що включає спеціально створену гнучку несучу механічну конструкцію з аеродинамічними площинами двох типів, які змінюють поставу примусово рухаючись завдяки електромеханічним перетворювачам під дією сигналів керування, що надходять від електронних пристроїв і зв'язаних з ними наборів поєднаних мікропроцесорних вузлів, а також спеціалізованих засобів вимірювання величин механічних рухів та їх представлення у вигляді інформаційних сигналів для контролю стабільності положення у просторі під час автономного польоту, ця комплексна інформаційно-вимірювальна система для дослідження аерозолів у повітрі прийнята за прототип, як найбільш близький аналог до запропонованого у цій заявці технічного рішення для побудови системи з іншою формою спеціалізації за призначенням. Але у названій інформаційно-вимірювальній системі [73], що виступає як прототип, відсутні описи стосовно цілого ряду принципових чи конструктивно-технологічних технічних рішень, які вкрай потрібні для побудови системи спостереження із властивостями, що були означені раніше. Тут в першу чергу немає жодної відповіді для низки питань із забезпеченням у активних механічних елементах системи достатньо швидких та синхронізованих циклічних рухів тих деталей, що у межах кожного блока здійснюють кріпленням різних за фізичною основою сенсорів для виконання ними точного сканування простору довкілля, наприклад, в найбільш економічному режимі із рівномірним обертанням по повному колу. Також відсутні описи будьяких функціональних засобів для встановлення та наступного збереження орієнтації відповідного сенсора у напрямку на об'єкт, котрий може досить швидко зміщуватися у просторі, але захоплений в полі зору під час спостереження може стати ціллю тільки на дуже короткий час. У зв'язку з цим треба ще знайти прийнятні принципові рішення, коли постає проблема технічної реалізації засобів хоча б задовільного супроводження цільового об'єкта як відображення на робочій площині сенсора, де він за сучасних обставин може мати кутову швидкість зміщення у межах сектору видимості до кількох сотень градусів за секунду. Сформульоване інакше таке означає технічно, що інтервал часу сприйняття сенсорами рухомого об'єкта може бути обмеженим лише кількома десятками мілісекунд, наприклад, від самого випадкового моменту появи і до наступного повного зникнення за горизонтом чи будівлею, яка екранує фізичну "видимість". Так само існує ще цілий ряд різних додаткових технічних проблем, які не є характерними для функціонування вибраного прототипу як виробу, а тому їх можливі розв'язання ніде не висвітлені в його описі. Однак без наявності позитивних пропозицій по розв'язанню навіть таких часткових проблем нова конструкція може бути не тільки обмеженою у наборі виконуваних основних функцій, а можливо і повністю недієздатною. Із викладеного слід зробити висновок, що задача створення інформаційно-вимірювальної системи як малогабаритної автоматичної "літаючої лабораторії" для дослідження та супроводження об'єктів, що у випадковий інтервал часу з'являються та швидко зміщуються в межах будь-якого кута у круговому полі зору сенсорів, де ці об'єкти спостереження мають прояви оптичного чи радіаційного, мікрохвильового, а також акустичного (шумового) енергетичного випромінювання, достатнього для сприйняття в умовах підняття як літального апарата над поверхнею ґрунту до кількох сотень метрів і його знаходження там під дією потоків повітря від спеціалізованих двигунів, дійсно має позитивне рішення в сучасних умовах розвитку техніки. Та для цього треба знайти нові принципові рішення як діяти спираючись на відомі результати наукових досліджень із залученням вже наявних сучасних технічних засобів. Для одержання саме таких наслідків технічного проектування конкретних виробів з означеними властивостями, що можуть мати практичне застосування, необхідні суттєво новітні конструктивні пропозиції, мають бути інші, ніж це досі відомо, зв'язки між визначеними для застосування в прототипі [73] головними елементами, приладами і пристроями, або ж взагалі слід виробити низку зовсім інших часткових рішень, що мають бути описаними окремо як принципові чи в необхідних деталях для з'ясування тієї взаємодії елементів, що саме надає бажаний ефект. Загальним для конструктивних ознак найближчого аналога та інформаційно-вимірювальної системи, яка запропонована згідно із цією заявкою на отримання патенту виглядає те, що у цих 11 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 пропозиціях є давачі з вимірювальними перетворювачами та мікропроцесори з інтерфейсними пристроями, і з них сформовано основу мікропроцесорного вузла, а також канали міжвузлових зв'язків, із залученням яких у межах системи утворено автономну мережу передавання цифрових кодів, в якій мікропроцесорні вузли розподілені на окремі функціональні рівні, та мікропроцесорні вузли для кожного з цих рівнів з'єднані каналами міжвузлових зв'язків по три в одному кластері, і в загальній структурі мережа об'єднала дві окремі подібні підсистеми, де мікропроцесорні вузли кластерів верхнього рівня кожної з підсистем підключені до трьох мікропроцесорних вузлів, що складають спільний кластер супервізорного рівня, коли частина електронних блоків безпосередньо асоційована як із структурною одиницею для всієї системи з функціонально орієнтованою гнучкою механічною несучою конструкцією, а сенсори давачів механічних зрушень її деталей переважно виконані як інтегровані конденсатори функціонально змінюваної ємності, і при цьому частина вузлів механічної конструкції виконана у вигляді двох типів аеродинамічних площин, адаптованих для розміщення в їх межах базового дослідницького вимірювального приладдя Суттю винаходу є технічне рішення для подолання раніше обговорених принципових недоліків, характерних для відомих аналогів, а саме прийняті заходи для отримання достатньо спрощеної для економічно обґрунтованої реалізації конструкції у вигляді малогабаритного виробу спеціалізованої системи і підвищення її надійності та ремонтопридатності при одночасному поліпшенню загальної функціональності, досягнення оперативності та достовірності даних як потоку цифрових кодів в системі, що отримані при одночасному виконанні послідовних вимірів оптичного чи радіаційного або ж мікрохвильового, а також акустичного (шумового) енергетичного випромінювання під час автоматично керованого автономного польоту як в режимі моторного підтримання заданої висоти підняття, так і з можливим використанням природних термічних висхідних струменів повітря для заощадження заряду електробатареї, що живить бортове електронне обладнання та спеціалізовані двигуни. Таке стає можливим в разі досконалої інтеграції між собою функціональних вузлів різного спрямування та реалізації логічних зв'язків як між самими мікропроцесорними вузлами, так і ними та сенсорами давачів різноманітного призначення завдяки тому, що усі функціональні аеродинамічні площини першого і другого типів скріплені між собою переважно з використанням їх торцевих частин так, що вони зорієнтовані відцентрово по радіусах і утворили два окремих подібних один до одного дискових ротори, які можуть обертатися в протилежних напрямках, а кожний з роторів включає згруповані переважно по три аеродинамічні площини першого типу циклічно переміщувані з поперековим нахилом так, що кожну з обмеженням у границях гострого кута вільного обертання із віссю кріплення перпендикулярною до задніх торцевих частин та співпадаючою із радіусом ротора приєднано до зовнішньої торцевої частини кожної однієї з набору аеродинамічних площин другого типу, коли остання встановлена переважно із постійним кутом атаки та закріплена по її ближчій до центру внутрішній торцевій частині перпендикулярно до утворюючих ліній одного з двох циліндричних двостінних стаканів, які в робочому режимі вимірювань здатні до постійного вільного обертання навколо їх центральної геометричної осі, що є загальною для гнучкої механічної несучої конструкції і спільною із осями обох роторів та додаткового внутрішнього циліндра, котрий виконаний як центральна опора для рухомих частин, де він є закритим з обох боків по його торцях кришками із решітчастими подовженнями у вигляді радіальних спиць, які скріплені на зовнішніх краях розташованим в тій самій площині діелектричним кільцем із поперековим перерізом переважно коробчастої форми, у якому стінка його внутрішнього контуру виходить за межі кругу обертання зовнішніх торцевих частин аеродинамічних площин (28) другого типу, а стінка його зовнішнього контуру не перекриває задніх торцевих частин аеродинамічних площин першого типу, у яких в межах фізичного обсягу їх внутрішніх порожнин постали змонтованими переважно по одному мікропроцесорному вузлу кожного кластера найнижчого рівня одної підсистеми із приналежними до цього вузла перетворювачами та давачами разом з їх сенсорами або у вигляді мініатюрних спрямованих радіоантен, або мікрофонних капсулів, або чутливих поверхонь оптичного блоку, коли в кожному обсязі порожнин аеродинамічних площин другого типу розміщено по три мікропроцесорних вузли одного кластера середнього рівня підсистеми, а у вільному обсязі між боковими поверхнями кожного циліндричного двостінного стакана, де за допомогою переважно нерухомого кріплення на його зовнішній стінці зібрано у єдиний блок повний набір аеродинамічних площин одного з двох роторів, встановлені мікропроцесорні вузли кластера верхнього рівня цієї підсистеми разом із засобами для їх інформаційного бездротового переважно оптичного зв'язку із інтерфейсними пристроями мікропроцесорних вузлів кластера супервізорного рівня, складові якого в об'єднанні разом із джерелами електроживлення усієї системи розташовано в межах внутрішнього циліндра, та, крім цього, до механічно зв'язаних з 12 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 ним частин несучої конструкції включено додаткові електромагніти, що є змонтованими переважно у внутрішніх коробах діелектричних кілець, котрі скріпили кінцівки радіальних спиць решітчастих кришок і разом з ними несуть електричні провідники, через які електромагніти підключені до джерел електроживлення так, що під керуванням сигналами від мікропроцесорних вузлів кластера супервізорного рівня із дією струмових імпульсів усі разом створили пари синхронних лінійних електродвигунів, за допомогою яких шляхом цілеспрямованої зміни активації струмом живлення котушок електромагнітів у кожну миттєвість роботи усієї системи встановлено послідовно задану у відповідності із комп'ютерною програмою кутову позицію по кругу та поперековий нахил для кожної з аеродинамічних площин першого типу. Крім цього, потрібної ефективності при спрощенні конструкції досягнуто тим, що у аеродинамічних площинах першого типу по лініях радіусів ротора біля їх ближчих до центру задніх торцевих частин є переважно по дві пари вертикальних діелектричних магнітожорстких керамічних стрижнів із осьовою поляризацією намагнічування встановлених так, що окружності їх розташування близькі до відповідних окружностей вертикальних геометричних осей полюсних закінчень електромагнітів лінійних синхронних електродвигунів із своїми котушками та підковоподібними діелектричними магнітом'якими керамічними магнітопроводами, коли їх горизонтальні частини орієнтовані переважно по продовженням ліній радіальних спиць у кільцях кожної решітчастої кришки, і при цьому крок розміщення самих електромагнітів через довжину контуру кільця виражено дробом із знаменником, кратним до кількості аеродинамічних площин першого типу в одному роторі, а в діелектричному діамагнітному матеріалі, який скріплює магнітожорсткі керамічні стрижні в єдиний блок у вигляді пластинчатої каретки, розміщено додатково переважно дві котушки із діелектричними магнітом'якими керамічними магнітопроводами, кінці кожної з яких приєднано через напівпровідникові випрямляючі мости до обкладинок конденсаторів інтегруючих чарунок, які підключено так, що струм їх періодичного розряду через електронні стабілізатори спрямовано для живлення мікропроцесорних вузлів з приєднаними у їх складі перетворювачами і давачами, котрі є розташованими в суміжних порожнинах аеродинамічних площин першого і другого типів, а також приладів із кластерів у циліндричному двостінному стакані. При цьому точність позиціювання рухомих частин забезпечено тим, що у безпосередній близькості до зовнішньої торцевої частини аеродинамічної площини другого типу та паралельно із площиною суміжного з нею бокового торця пластини каретки розташовано провідникову поверхню обкладинки конденсатора відкритого коливального контуру додаткового високочастотного генератора давача кута поперекового нахилу для кожної однієї з трьох аеродинамічних площин першого типу, які тут встановлені рухомими з обмеженням обертання в границях гострого кута їх пустотілої осі кріплення у втулках, а високочастотні генератори підключені до перетворювачів мікропроцесорних вузлів одного кластера середнього рівня підсистеми, який розташовано в порожнині цієї аеродинамічної площини другого типу. Позитивний техніко-економічний ефект забезпечують підвищені експлуатаційні характеристики інформаційно-вимірювальної системи як малогабаритного та мобільного комплексного вимірювального засобу, що мають бути отримані при її використанні в автоматичному режимі в будь-яких погодних умовах при автономній роботі під час самокерованого польоту, де окрім фотометричних сенсорів для дослідження оптичних проявів потенційних об'єктів спостереження, працюють давачі виміру радіохвильової та акустичної активності. Досягнуте врезультаті збільшення кількості узгоджено діючих давачів і розворот їх сенсорів із спрямуванням при різних значеннях кута азимуту відносно положення конструкції апарата надає потрібну інформацію про можливу появу сторонніх об'єктів, їх стан як випромінювачів та параметри руху за умов збереження сталого напрямку та програмованої орієнтації усієї системи у просторі. Крім того, завдяки оперативній паралельній обробці усього масиву даних, що надходять під час вимірів, стає можливим як самостійна адаптація до реальних умов довкілля, так і організація безпосереднього діалогу наявних апаратних засобів із загальним центром керування та накопичення даних через радіо чи оптичний інформаційний канал, підтримуваний мікропроцесорами кластера супервізорного рівня системи, як для заміни загальних програм дії для автоматичного вимірюванням властивостей об'єктів спостереження, так і корекції поточних налаштувань залежно від виявлених особливостей автономної роботи. Усе це досягнуто при загальному спрощенні та зменшенні габаритів і ваги конструкції для системи з такими властивостями, а також при можливості зниження її виробничої вартості. Усе це складає передумови використовувати подібний виріб без високих експлуатаційних витрат на відновлення в разі цілком імовірного руйнування окремих зовнішніх деталей через випадкові 13 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 аварійні ситуації із зіткненням з предметами оточуючого середовища або падіння з невеликої висоти на ґрунт та деформації зовнішніх елементів конструкції. Умовне просторове зображення на фіг. 1 надає спрощену функціональну схему приєднання сенсорних частин давачів в межах деталізованої лише однієї із двох подібних підсистем інформаційно-вимірювальної системи, де на кожному із трьох рівнів є кластери, які сформовані з трьох мікропроцесорних вузлів та каналів міжвузлових зв'язків між інтерфейсними пристроям. На фіг. 2 у вигляді, подібному до наданої на фіг. 1 умовної просторової проекції відображено яким чином в межах несучої конструкції виконано розташування двох підсистем та сполучення додатковими каналами міжвузлових зв'язків множин кластерів у довершеній інформаційновимірювальній системі як в одній комплексній "гіперсистемі", що реалізує в єдиному оперативному та нерозривному інформаційному процесі всі функції збору первинної інформації. На площинному кресленні, що подане на фіг. 3, показано у двох проекціях із розрізами взаємне розташування аеродинамічних площин першого і другого типів в межах одного сектора ротора і границі поперекового нахилу при керуванні кутами постави (кутами атаки) площин першого типу та послідовні за перерізом зміни спрямування центральних ліній профілю для площин другого типу. Аксонометричні зображення на фіг. 4 надали уяву про форму і орієнтацію при розміщенні у вільному просторі між верхньою та нижньою оболонковою покрівлею аеродинамічних площин першого типу різноманітних за своїм призначенням блоків давачів із сенсорами, що спрямовані переважно назовні по радіусу, а також підключеного до них за допомогою відповідного перетворювача самого мікропроцесорного вузла. Аксонометричні проекції, що подані на фіг. 5, є ілюстрацією фрагмента зовнішнього вигляду конструкції із запропонованим варіантом повністю зібраного з'єднання аеродинамічних площин першого та другого типів, що включає насаджену на спільну радіальну пустотілу вісь одну каретку лінійного двигуна із стрижневими магнітами і провідниковими поверхнями сенсора давачами кута постави, а також схематичне зображення лише однієї групи котушок з магнітопроводами і розташування під час руху стрижневих постійних магнітів з пластиною каретки відносно полюсів електромагнітів. Фіг. 6 із фрагментом лінійного двигуна та суміщеними з його елементами часовими діаграмами струмів у системі котушок розкриває особливість роботи механізму зміни кута нахилу каретки при її переміщенні по дузі кола і встановленні програмованої величини кута атаки аеродинамічної площини першого типу у відповідності із її перебуванням в певному секторі кола під час обертового руху. Прямокутні проекції на фіг. 7 із розрізами та додатковою деталізацією у вигляді окремих аксонометричних проекцій аеродинамічних площин другого типу відображають стан виробу в зібраному стані із електронно-оптичними засобами безпровідної передачі інформаційних сигналів між рухомими роторними частинами та опорною центральною основою цієї рухомої несучої конструкції інформаційно-вимірювальної системи. На фіг. 8 у формі, що є подібною до використаної на фіг. 5 і фіг. 7, подано збільшений вигляд сегмента, складеного із однієї площини другого типу та прикріплених до її зовнішнього торця трьох площин першого типу разом із частковою кількістю котушок лінійного двигуна у конструкції, яка є придатною для використання в автономному польоті чи тимчасово закріпленої на верхівці телескопічної вежі з метою виконання подовженого кругового спостереження із стаціонарної позиції. Спрощені діаграми типових імпульсів на фіг. 9 показують у формі аналогових сигналів сплесків напруги на виходах давачів - їх часове розташування, коли сенсори примусово та синхронно зміщуються за допомогою керованих лінійних двигунів у протилежні боки, і це розкриває принципову різницю у подовженості їх існування (по відрізку на осі машинного часу) в разі спостереження сталого і рухомого швидкісного об'єктів залежно від напрямку його переміщення у полі зору сенсорів. Відомості, які підтверджують можливість здійснення винаходу. Сенсорними частинами давачів 1 (Фіг. 1), тобто тими частинами конструкції (сенсорами), що є чутливими до безпосередньої фізичної дії на них з боку досліджуваного середовища, у цих спеціалізованих давачах в запропонованій конструкції інформаційно-вимірювальної системи виступають цілеспрямовано створені такі компоненти, для яких зміна енергетичного впливу (мікрохвильового електромагнітного поля, освітлення чи пружних акустичних хвиль) спонукає до відповідної функціональної зміни еквівалентного імпедансу (опору, ємності чи індуктивності) або ж генерованої напруги на вихідних клемах цього пристрою і є в подальшому підсиленим до потрібного рівня. В такому разі це стає тим, що розуміють під сигналом від давача: слугує носієм інформаційної складової аналогового сигналу. У кінцевому розгляді сам давач 1 на 14 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 постійній основі є підключеним, як це здійснено у прототипі, до відповідних входів вимірювального перетворювача 2. Електричним сигнальним виходом перетворювачів 2 вже виступає переважно складена із кількох паралельних гальванічних ліній шина зі змінюваним у часі станом розподілу потенціалів на її дротах, де вони у сукупності в кожну мить відтворюють заданий правилом дискретного перетворення поточний математичний код, що в обраному форматі в системі прийнято визначати як діючий фізично цифровий вираз для вибраної величини в її первинній аналоговій формі у вхідній системній змінній. Виходи цифрових ліній вимірювальних перетворювачів 2 (навіть коли вони відображають так званий "послідовний" у часі код) в свою чергу приєднані до вхідних пристроїв, наприклад, приймальних регістрів, керованих мікропроцесором 3 через наявні в типовій конструкції мікропроцесорного комплексу специфічні шини для сприйняття сигналів його вхідних даних. Також до мікропроцесора 3 (на фіг. 1 як у прототипі він зображений невеличким колом) приєднаний через набір його внутрішніх шин інтерфейсний пристрій 4, від якого відгалужені зовнішні відносно мікропроцесори 3 лінії передавання переважно послідовних за формою цифрових кодів, наданих зміною електричних потенціалів на сигнальних дротах або в іншому зв'язковому середовищі - радіо- чи оптичному - згідно з протоколом в одному із відомих стандартизованих форматів, і вони разом утворюють канали 5 зв'язків. Відповідно до прототипу кожний комплекс, де є функціональні блоки, позначені позиціями 2, 3 та 4, існує в цій системі як основа її базового пристрою - мікропроцесорного вузла 6, що графічно на фіг. 1 позначений більшим колом (наприклад, як у центрі схеми), в складі якого також можуть бути включені інші відомі блоки чи модулі. Це можуть бути додаткові пристрої пам'яті чи будь-які інші цифрові засоби, у тому числі і адаптовані для керування командапаратом вихідних пристроїв, що дивлячись зі сторони мікропроцесора 3 технічно виглядають як споріднена пара адресованих регістрів для прийому та для видачі назовні сформованих кодів, коли від мікропроцесора 3 надходить відповідна множина електричних сигналів, що означає команду виконання поточного обміну інформацією. Канали 5 зв'язків, які вийшли із інтерфейсного пристрою 4 одного мікропроцесорного вузла 6, на іншому закінченні постали приєднаними до такого ж інтерфейсного пристрою другого подібного мікропроцесорного вузла, тому в цій системі, як і у прототипі, вони виступили каналами міжвузлових зв'язків. Загалом усі разом вони фізично і логічно утворили спеціалізовану за використаними засобами мережу передавання даних вимірювання у вигляді цифрових кодів так, що усюди реалізовано з'єднання створених інформаційних потоків із сигналів за естафетним принципом переважно порціями по окремих ланках від вузла до вузла як "точка-точка" ("point-to-point" або "port-to-port"). Три канали 5 міжвузлових зв'язків з'єднали між собою три мікропроцесорних вузли 6 в єдине конструктивне угрупування, яке в прототипі і в цьому описі носить назву "кластер". В межах кластера кожний з його мікропроцесорних вузлів 6 є підключеним до двох сусідніх так, що на практиці реалізовано надсилання та приймання від них цифрових кодів через канали 5 міжвузлових зв'язків та відповідні інтерфейсні пристрої 4 незалежно від технічного стану або режиму активності того з мікропроцесорних вузлів 6 цього кластера, який в таку мить не приймає участі в поточному інформаційному обміні. Особливість прототипу та цієї системи полягає у тому, що вся множина наявних в системі мікропроцесорних вузлів 6 з необхідною кількістю швидкодіючих давачів 1 утворюють дві окремі, але подібні за структурою та складені з однакових компонентів інформаційновимірювальні підсистеми, які на фіг. 1 кожна окреслена умовним графічним овалом із позиційними позначеннями 7 або 8. При цьому надана на фіг. 1 функціональна схема 7 фактично віднесена лише до однієї з означених підсистем, у той час як таке ж саме зображення для іншої підсистеми 8 є умовно перекритим для зору, тому що воно графічно перебуває знизу під наданим деталізованим зображенням. Мікропроцесорні вузли 6 у кожній з підсистем розподілені по трьох функціональних рівнях так, що на вищому рівні існує лише один кластер, який об'єднує відповідні три мікропроцесорних вузли 6 в окрему функціональну структуру - кластер верхнього рівня. На фіг. 1 його зображено в центральній частині схеми трохи вище, а нижче під ним подано один із трьох кластерів середнього рівня, де його мікропроцесорні вузли як кола для графічного виділення умовно накреслені трохи меншого діаметра. Ще трохи нижче та по усій периферії схеми умовними колами із різним, але найменшим діаметром, показані мікропроцесорні вузли 6 найнижчого рівня, що зібрані у свої кластери разом із приналежними до них давачами 1 та їх сенсорами, які надані умовними графічними позначеннями для електросхем в межах трапецієвидних подовжених рамок. 15 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 Як у прототипі, усі ці кластери складені із трьох мікропроцесорних вузлів 6, що існують на нижчому функціональному рівні та є приєднаними лише до одного відповідного до них мікропроцесорного вузла у кластері на більш високому рівні шляхом з'єднання трьох інтерфейсних пристроїв 4 каналами 9 міжвузлових зв'язків з одним мікропроцесорним вузлом 6 на вищому рівні. При описаній формі фізичного з'єднання канали 9 міжвузлових зв'язків логічно з'єднали ці мікропроцесорні вузли 6 між собою за принципом "точка-точка" та забезпечили трансляцію усіх даних у формі цифрових кодів, отриманих від давачів 1 приналежних будьякому з мікропроцесорних вузлів кластера на нижчому рівні, до відповідного мікропроцесорного вузла 6 на вищому рівні (Фіг. 1), а також надали постійно існуючий інформаційний зв'язок між мікропроцесорними вузлами 6 транслюванням будь-яких цифрових кодів через один безпосередній шлях, що їх з'єднує, напряму, та при необхідності через чотири додаткові альтернативні шляхи. Іншими передбаченими в конструкціях підсистем 7 та 8 каналами 10 міжвузлових зв'язків (на фіг. 1 вони, як приклад, показані лише у верхній частині схеми) з'єднано мікропроцесорні вузли 6 суміжних кластерів, приналежних одному логічному рівню, що створив це угрупування (у прототипі це угрупування назване "домен" відповідного рівня). При цьому з'єднання каналами 5 та 10 міжвузлових зв'язків виконано так, що вони підключені послідовно по черзі. Тоді на кінцевому кроці вказаної форми підключення стає утвореним постійно існуючий спільний для трьох кластерів кільцевий шлях з шести каналів (5, 10, 5, 10, 5, 10) міжвузлових зв'язків для передавання цифрових кодів між будь-якою парою мікропроцесорних вузлів 6 цього домену фактично незалежно від стану можливого "розриву" будь-якого з каналів 5 міжвузлових зв'язків. У кожній із двох описаних структур, що є використаними для побудови підсистем 7 та 8, за допомогою діагональних міжрівневих каналів 11 міжвузлових зв'язків з'єднано три мікропроцесорні вузли 6 кластерів одного із доменів на нижчому функціональному рівні, які ще не були задіяні в формуванні кільцевого шляху за допомогою каналів 5 та 10, з трьома мікропроцесорними вузлами 6 одного кластера вищого рівня (на фіг. 1 для прикладу відображено лише два з них). Так забезпечено форму з'єднання в усій цій мережі, що гарантує постійне існування достатньої кількості альтернативних шляхів для передавання цифрових кодів в кожній з підсистем 7 та 8 в разі будь-якого технічного чи аварійного виключення із числа наявних навіть кількох суміжних мікропроцесорних вузлів 6 та множини приналежних до цієї групи каналів 5 міжвузлових зв'язків або блокування дії їх інтерфейсних пристроїв 4 через перевантаження сигналами. У підсистемах 7 та 8 на їх верхньому функціональному рівні існують утворені разом у сумі два повних кластери із мікропроцесорних вузлів 6 (по одному для підсистеми), де кожний з них має технічно надійний та досконалий по продуктивності інформаційний зв'язок із будь-яким зі своїх суміжних мікропроцесорних вузлів 6 на кожному з нижніх функціональних рівнів цих підсистем. Тобто в комплексній конструкції, що складена у вказаний спосіб із подібних підсистем, досягнуто апаратними засобами і реалізовано в кожному часовому перерізі загальну нерозривність блоків даних у потоці вимірювальної інформації, яка виникає на нижчих рівнях від усіх давачів, і при цьому таке завжди діє при передаванні її в напрямку до верхніх функціональних рівнів. Характерно, що так само нерозривним є і зворотний шлях для передавання команд керування чи констант налаштування через адресовані елементи будьякої з підсистем. Зв'язок між самими підсистемами 7 та 8, який відповідає належній високій якості та стійкості до випадкових руйнівних дій або інформаційного перевантаження каналів, виконано через закономірне активне резервування додаткових каналів передачі даних, що було зроблено раніше у прототипі. Згідно з цією пропозицією теж за допомогою додаткових трьох мікропроцесорних вузлів 12 утворено спільний кластер супервізорного рівня (Фіг. 2), що показаний на схемі в центрі в межах просторового циліндра. Канали 13 міжвузлових зв'язків підключені з обох кінців тільки до кожного з мікропроцесорних вузлів 12 за принципом "точкаточка" і забезпечують трансляцію цифрових кодів між будь-якою парою з них незалежно від стану третього мікропроцесорного вузла цього кластера супервізорного рівня так само, як це передбачено і у кластерах, складених із мікропроцесорних вузлів 6 в окремих підсистемах 7 та 8. З іншого боку кожний з мікропроцесорних вузлів 6 кластерів верхнього рівня будь-якої з підсистем 7 та 8 є підключеним до суміжних з ними мікропроцесорних вузлів 12 кластера супервізорного рівня за допомогою шістьох прямих каналів 14 та шістьох діагональних каналів 15 міжвузлових зв'язків, і це зроблено так само як у прототипі (центральна частина зображення на фіг. 2 для спрощення графіки у прикладі надає лише по два таких канали). У згаданій спільній для двох підсистем зоні комплексної інформаційно-вимірювальної системи (як 16 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 "гіперсистеми") утворено шість трикутних (за своєю логічною структурою замкнених) "кільцевих" шляхів для передавання даних, де вони послідовно каналами 13, 14 та 15 міжвузлових зв'язків сполучили мікропроцесорні вузли 6 через посередництво мікропроцесорних вузлів 12 кластера супервізорного так, що завжди забезпечено постійно існуючі технічні засоби для просування та реплікації цифрових кодів в будь-якому напрямку практично незалежно від реального стану дієздатності окремих каналів чи мікропроцесорних вузлів. При цьому інформаційний (логічний) зв'язок постає нерозривним, коли навіть два із загального числа каналів (5, 13, 14 чи 15) міжвузлових зв'язків або мікропроцесорних вузлів 6 та 12 в поточну миттєвість можуть бути визнаними як такі, що є функціонально непрацездатні ("заблоковані"), або вони знаходяться тимчасово через особливість циклічної форми зв'язку в стані нездатності миттєво передавати сигнали. Мікропроцесорні вузли 12 кластера супервізорного рівня безпосередньо фізично не взаємодіють ні з самими перетворювачами (2) та давачами (1), а ні тим більше з їх сенсорними частинами. Натомість вони постійно є сполученими з ними у логічному плані через потік канальних інформаційних сигналів. В запропонованій конструкції це виконано так, що будь-який первинний аналоговий сигнал у його цифровому відображенні є досяжним для схоронення та аналізу через його цілеспрямовану реплікацію в запам'ятовуючих пристроях у проміжних мікропроцесорних вузлах (6) на шляху передавання цих копій на всіх відповідних функціональних рівнях кожної з двох підсистем (7, 8) незалежно від того, давачі (1) якої з них є джерелами для формування оригіналів цих вимірів. В запропонованій інформаційно-вимірювальній системі як комплексній "гіперсистемі" кожний із мікропроцесорних вузлів (12) кластера супервізорного рівня має періодично отримувати частково оброблену інформацію, яка відображає змінювані сигнали з давачів (1) відповідно до енергетичного впливу на різні за своїм характером чутливості первинні сенсори (Фіг. 1 та Фіг. 2). Згідно із цією пропозицією, як на відміну від прототипу, до складу різноманітних типів сенсорів включено радіоантени 16 для сприйняття мікрохвильових електромагнітних процесів, капсулі 17 спрямованого та диференційного 18 мікрофонів, а також елементи оптичного блока 19, де зосереджено переважно узгоджені за напрямом ліній максимуму чутливості оптичні фотометри 20 та 21 із різною апертурою. Фотометр 20 переважно налаштований для сприйняття сфокусованого на площині його чутливої частини пучка променів, які надходять із зовнішнього простору у межах гострого кута (орієнтовно 10…30 градусів). Інакше є виконаним фотометр 21, де його високочутлива поверхня здатна сприймати усією своєю відкритою площею дуже короткі світлові імпульси ("спалахи") незалежно від їх відстані та кутового спрямування на джерело, яке видиме в розкритому отворі корпусу в межах розгорнутого кута у 100…140 градусів. Як показано на обох схемах (на фіг. 1 у нижній частині зображення сенсорів умовно збільшено) кожний вид давачів 1 із його сенсорами (16-19) підключено до відповідних аналогово-цифрових перетворювачів 2, що входять до складу лише одного з трьох мікропроцесорних вузлів 6, але тільки свого кластера найнижчого рівня (саме його для виразності виділено штрих пунктирною лінією). Таке обумовлено головним напрямом, який тут вибрано при побудові конструкції типового функціонального модуля: кожен з них має переважно один вид оснащення сенсорами фізичного поля, наприклад, як оптичний блок 19 чи пристрій іншого призначення. Типовий модуль (Фіг. 3 та Фіг. 4) виконаний у вигляді окремої та цілком самостійної частини в загальній конструкції системи, оформлений для всіх його різновидностей використаних сенсорів (Фіг. 4) з єдиною загальною масою, переважно рівним її розподілом у горизонтальній площині і однаковим положенням центра ваги в межах одних для всіх сталих габаритних розмірів, а також оснащений нормалізованими в межах системи взаємно замінними засобами з'єднання з іншими механічними частинами системи. Будь-який з таких модулів, що складають стабільну кількість у цій системі, в разі виходу з ладу стає заміненим на інший аналогічний із ремонтного комплекту шляхом доволі простих збиральних операцій без принципової зміни базових налаштувань. Кожний функціональний модуль описаного типу (Фіг. 4) має обов'язково присутнім у його складі мікропроцесор 3 зі своїм інтерфейсним пристроєм 4, а також один чи декілька (по числу каналів сприйняття фізичного збудження) перетворювачів 2. На нижній частині фіг. 3 (проекція у плані) та у трьох окремих аксонометричних видах на фіг. 4 ці особливості розкриті більш детально. Головна відмінність між окремими конструкціями типових функціональних модулів полягає виключно в їх оснащенні різними за призначенням і відповідними до характеру первинних сигналів давачами (1) та змонтованими тут їх сенсорами (16-19). Крім цього, наприклад, в склад 17 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 оптичного блока 19 як вхідного елемента давача (1) для розширення діапазону застосувань його чутливих сприймаючих частин - фотометрів (поз. 20 та 21) - передбачено введення (як доданих деталей залежно від форм комплектування) одного із набору кількох швидкозмінних об'єктивів 22 в однакових типових оправах, але із різною фокусною відстанню для встановлення потрібного масштабу видимості об'єкта, а також одного із багатьох підібраних за оптичними якостями і встановленого у типовій оправі плівкового світлофільтра 23 з метою виділення певної зони спектру збуджуючого випромінювання. В одному із варіантів передбачених застосувань є доданим подібний за формою, схожою до плівкової частини світлофільтра 23 такий спеціальний площинний багатошаровий композитний матеріал (наприклад, із зовнішньою металевою часткою, отриманою вакуумним напилюванням), що має шар із властивостями сцинтиляційної речовини. Саме при бомбардуванні її поверхні крізь найтонший шар щільного оптичного екрана іонізуючими частками така речовина сприймає їх енергію та перетворює її в збудження електромагнітної хвилі, генеруючи таким чином на тлі затемненої пластини "спалахи" в діапазоні вже видимого світла, які далі стають сприйнятими ширококутним дуже чутливим фотометром 21. Особливістю даної пропозиції є те, що будь-який визначений за своїм призначенням функціональний модуль описаного типу за зовнішнім виглядом оформлений як відносно тонка пластина із слабкоопуклими оболонковими частинами з аеродинамічним профілем у її перерізі. На фіг. 3 в правій колонці знизу як приклад надана її спрощена форма у вигляді плаского овалу. Аеродинамічний профіль перерізу створено тому, що при русі в середовищі повітря під час обтікання ним пластини саме через обрану форму оболонок задано необхідну різницю швидкостей струменів знизу та зверху, а із визначеною обрахунком параметрів руху поточну міру нахилу постави та за умови штучного утримання позитивного кута атаки, вона відіграє роль функціональної аеродинамічної площини, завдяки якій в межах цієї ділянки гнучкої механічної конструкції системи виникає контрольована вертикальна (підйомна) складова діючих розподілених сил. У запропонованій із такою відмінністю механічній частині конструкції описані пластини, що одночасно є фактично також базовими функціональними модулями першого типу (саме вони несуть у собі давачі 1) в наступному тексті та на відповідних зображеннях (Фіг. 3 і далі) означені як аеродинамічні площини 24 першого типу. У кожній з аеродинамічних площин 24 першого типу виділено окремими конструктивними утвореннями передню 25 та задню 26 торцеві частини (Фіг. 4), які є принципово відмінними за своїм оснащенням і функціональними особливостями через те, що вони теж тут складають своєрідні базові блоки інформаційно-вимірювальної системи. Передня торцева частина (25) виступає як елемент для надійного механічного кріплення та виконання можливої юстировки за орієнтацією при проведенні налаштувань відповідних частин сенсорів давачів (1): радіоантени 16, звукопроводу мікрофонного капсуля 17 спрямованого мікрофона, а також переднього звукопроводу мікрофонного капсуля 18 диференційного мікрофона. Крім самого засобу, для юстировки та кріплення оптичного блока 19, передня торцева частина (25) аеродинамічних площин (24) першого типу є оснащеною спеціалізованими затискачами для швидкозмінного об'єктива 22, а також оправи плівкового світлофільтра 23 (Фіг. 4). Задню торцеву частину 26 (вона є ближчою до центру усієї конструкції інформаційновимірювальної системи) виконано переважно як жорсткий фланець із тією особливістю, що разом із віссю 27 кріплення усього модуля та його внутрішніми елементами набору жорсткості (кількома радіальними стрижнями і нервюрами, що задають зовнішню форму модуля як пластини у будь-якому перерізі) забезпечено кероване обертання усієї зібраної як одне ціле аеродинамічної площини (24) першого типу навколо її геометричної осі (визначеної у подовженому напрямку) із мінімальним збудженням крутильних коливань та можливим спотворенням статичної форми під дією направлених по різному струменів повітряних навантажень. За допомогою осі (27) кріплення кожна аеродинамічна площина (24) першого типу приєднана як рухома деталь до іншого фігурного елемента механічної конструкції системи, де ним виступає аеродинамічна площина 28 другого типу. На проекції в плані (Фіг. 3) ця збиральна одиниця конструкції має загальну форму, подібну до кутового сектора із радіусною круговою вибіркою у тій частині цієї самої аеродинамічної площини, що є ближчою до центру загальної конструкції. Форма внутрішньої торцевої частини 29 визначена так, що завдяки округленню досягнуто її досконале суміщення із циліндричною поверхнею відповідного радіуса, коли вона розташована перпендикулярно до утворюючої лінії циліндра. Цим вона кардинально відрізняється від зовнішньої торцевої частини 30 аеродинамічної площини (28) другого типу, яка 18 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 в плані в основному зберігає контур кола радіусом, рівним відстані до центра цього сектора. Від правильної циліндричної поверхні на боковій поверхні абрис зовнішньої торцевої частини (30) аеродинамічної площини вирізняють три невеликих площинних зрізи, які на проекції в плані утворюють три хорди, що розташовані рівномірно по контуру сектора. Починаючи з внутрішньої торцевої частини (29) уся ця пластина має спеціальний аеродинамічний профіль перерізу із тією особливістю, що центральна лінія подовженої осі кожного овалу відповідних нервюр її набору жорсткості (саме вони утворюють форму перерізу) є нахиленою до горизонтальної площини проекцій під різним за величиною гострим позитивним кутом 31 (Фіг. 3). Тут він виступив геометричним виразом кута атаки при зрушенні аеродинамічної площини (28) другого типу, наприклад, у напрямку справа наліво, де саме для такого випадку, як прикладу, виконано зображення у центральній частині правої колонки на фіг. 3. Величину кута атаки передбачено підтримувати у межах статичних значень нахилу (31) цього генерального профілю як закономірно змінювану величину, що є функцією лише відстані відповідної нервюри від центра описаного кола сектора. В такому разі ефективний кут атаки уздовж всього набору профілів виконано монотонно зменшуваним. Біля зовнішньої торцевої частини (30) нахил центральної лінії нервюри (перерізу профілю) є зменшеним і досяг переважно нульової величини. На фіг. 3 це показано у нижньому прикладі положень нервюр для всього набору перерізів (чотири типових профілі подані у правій колонці). Від внутрішньої торцевої частини (29) зовнішню торцеву частину (30) аеродинамічної площини (28) другого типу відрізняє також її оснащення жорсткою рамою чи коробом з трьома переважно циліндричними заглибленнями 32 чи кількома отворами у вертикальному наборі із спільною віссю, виконаних у міцному матеріалі цієї частини конструкції для пропуску в утворених порожнинах кінцевої частини осей (27) кріплення аеродинамічних площин (24) першого типу. Суміщення обох аеродинамічних площин за допомогою осей (27) кріплення виконано так, що для будь-якої із набору з трьох аеродинамічних площин (24) першого типу, яка є приєднаною до однієї зовнішньої торцевої частини (30), для неї забезпечена можливість вільно обертатися відносно спрямленого зрізом кінцевого профілю цієї аеродинамічної площини (28) другого типу, але лише в границях визначеного гострого кута 33. Конструктивними засобами є чітко встановленими як постійні значення налаштувань крайні границі для обмежувачів напрямків середньої лінії контуру нервюр у положенні максимуму позитивного 34 та цієї ж лінії у положенні максимуму негативного 35 відхилення для динамічно змінюваного значення кута атаки. Примусовий рух аеродинамічної площини (24) першого типу та поточна фіксація кута атаки у вказаних межах в запропонованій інформаційно-вимірювальній системі є реалізацією керування величиною створюваної підйомної сили при постійній швидкості повітряного струменя, що спрямований їй назустріч. При цьому весь час робочого режиму кожна з аеродинамічних площин (24) першого типу перебуває в стані динамічного визначення шляхом обчислень на підставі виміру змінюваних параметрів середовища та встановлення керованим нахилом актуального на цю мить саме для неї значення кута атаки 33, величина якого ніколи не виходить за обмеження - положення по лінії максимуму позитивного 34 або лінії максимуму негативного 35 відхилення (Фіг. 3). Вказане суміщення та рухоме з'єднання трьох аеродинамічних площин (24) першого типу з однією із аеродинамічних площин (28) другого типу виконано із використанням переважно трьох (але не менше двох) еластичних втулок 36 (Фіг. 5), у внутрішньому отворі яких є затисненою подовжена кінцева частини осі 27 кріплення. Переважно жорсткий стакан у кожній із втулок 36 закріплено в рамі, коробі чи міцному тілі кількох нервюр цієї зовнішньої торцевої частини (30) аеродинамічної площини (28) другого типу (на фіг. 5 нервюри умовно показані тільки їх частковими контурами, які окреслюють поверхню). Подібна форма кріплення як технологічний прийом є широко використаним в сучасній техніці при побудові різноманітних об'єднань елементів рам у гнучких несучих конструкціях виробів, де стає досягнутим довговічне пружне (амортизоване) рухоме з'єднання, коли конструктивно кути обертання встановлено відносно невеликими через чітке обмеження граничних величин. В цих вузлах при знятті деформуючого зусилля зрушена частина виробу зразу відновлює попереднє положення деталей через передбачену вибором матеріалу пружність еластичних елементів з'єднання. Застосування кількох втулок (36) для кріплення обертового елемента гарантує мінімальне відхилення від початкового положення уздовж геометричної осі при накладанні довільних поперекових зусиль. Особливо таке стосується виступаючого зовнішнього кінця осі (27) 19 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 кріплення, до якого в цьому місці нерухомо приєднано аеродинамічну площину (24) першого типу, що діє на з'єднання подібно механічному важелю. В своїй середній частині вісь (27) кріплення має насаджену на неї нерухомо діелектричну пластину 37 з фігурними вирізами. Вона є основою у специфічної для запропонованої системи збірної одиниці (складного вузла), якою тут виступає каретка 38 (Фіг. 5). Діелектричну пластину (37) (вона відображена контурними лініями) переважно виконано так, що в її чотирьох кутах у відповідних технологічних отворах затиснені нерухомо чотири керамічні стрижні 39, які виготовлені переважно із міцного діелектричного (керамічного або термічно спресованого) матеріалу з високим значенням коерцитивної сили і магнітною поляризацією уздовж центральної осі симетрії. Виконано осьове намагнічування, що створене при виробництві завдяки відомій технологічній операції. Це забезпечило постійне існування на торцях стрижнів (39) як чітко означених частинах магнітопроводів магнітних полюсів (N - "North", S - "South"). За вибраним конструктивним принципом встановлення стрижнів вони розташовані парами із розворотом магнітної по черзі так, що загалом утворюють у відповідних кутах на різних сторонах діелектричної пластини (37) дві пари магнітних блоків із взаємно протилежною поляризацією (на фіг. 5 ці магніти зображені як циліндри із позначеннями полюсів на площині пластини). Іншою важливою особливістю запропонованої конструкції каретки (38) постало виконаним укріплення в самому діелектричному матеріалі пластини (37) безпосередньо між намагніченими стрижнями (39), перпендикулярно до їх центральних (подовжених) осей симетрії та паралельно із віссю симетрії самої механічної осі (27) кріплення переважно двох котушок 40 і відносно коротких магнітом'яких магнітопроводів 41 як стрижневих осередків для них. Котушки (40) із своїми магнітопроводами (41) - стрижнями із пресованого фериту - розташовані в межах взаємодії магнітних полів, які створені постійними магнітами - стрижнями 39 у кутах пластини (37). Але сумарний статичний магнітний потік уздовж стрижневих керамічних магнітопроводів 41 при вказаному розташуванні є значно меншим через часткову індукцію тому, що стрижні (41) є практично притисненими з боку саме до середньої частини (по довжині утворюючих ліній циліндрів) відповідних намагнічених стрижнів (39), де перпендикулярна складова вектора індукції має значення модуля близьке до нуля. Конструктивно вісь (27) кріплення виконана так, що її центральна частина є порожнистою та здатна (як трубчаста конструкція) до механічного проведення наскрізь неї необхідних елементів ліній електричних з'єднань, складених із кількох (переважно восьми та більше) високочастотних коаксіальних мікрокабелів чи симетричних звитих пар тонких ізольованих дротів для фізичної реалізації середовища, де утворені канали (5) міжвузлових з'єднань інтерфейсних пристроїв (4) мікропроцесорних вузлів (6) у кластерах найнижчого та середнього рівнів окремих підсистем (7 чи 8) інформаційно-вимірювальної системи. Як варіант спрощеного виконання конструкції каретки (38) при певному зниженні кількісних показників, але без порушення основних функцій, центральна частина довжини порожнистої вісі (27) кріплення, що займає передбачену для монтування додаткових деталей прямокутну вибірку діелектричного матеріалу (на фіг. 5 показана в пластині (37) контуром паралелепіпедів), із зовні є охопленою з'єднаними разом півкільцями із керамічного діелектричного магнітного матеріалу із високим значенням магнітної сталої (наприклад, середньочастотного фериту). Вони у сукупності склали достатньо ефективний магнітом'який осередок, де на його зовнішній циліндричній поверхні намотано витки з дроту котушки 40, цілком подібний до одного стрижня магнітопроводу 41. Через такий модифікований магнітопровід в центральні частині відбулося замикання у всіх його змінах значної частки магнітного потоку, що є створеним одночасно усіма чотирма постійними магнітами - керамічними стрижнями (39), але у помітно меншому обсязі через наявні тут вимушені конструктивні діамагнітні зазори із діелектричного матеріалу пластини (37) каретки (38). Переважно безпосередньо біля закінчення осі (27) кріплення біля задньої торцевої частини (26) аеродинамічної площини (24) першого типу розташована інтегруюча чарунка 42, яка є електротехнічним пристроєм, де в складі його конструктивних елементів обов'язково є конденсатори, здатні до накопичення енергії від періодичного надходження до їх обкладинок електричних імпульсів. Інтегруюча чарунка (42) розташована переважно у вільному фізичному обсязі у середині зовнішньої оболонки кожної аеродинамічної площини (24) першого типу. До котушок 40 її підключено переважно дротовим монтажним з'єднанням через посередництво мініатюрного напівпровідникового випрямляючого мосту. На фіг. 5 він не показаний як елемент, що за фізичними розмірами може бути вмонтованим в кабель у точці передбаченого для цього розриву його дротів. Подібний вид електричного зв'язку виключає зворотний струм та розряд конденсатора інтегруючої чарунки (42) через дуже малий внутрішній активний опір приєднаної 20 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 котушки (40) у той час, коли її електрорушійна сила на дротових виводах є меншою за різницю потенціалів від заряду на обкладинках самого конденсатора. На передній торцевій частині (30) аеродинамічної площини (28) другого типу паралельно до геометричної площини зрізу, тобто перпендикулярно до лінії осі (27) кріплення, розташовано провідникову поверхню обкладинки 43 конденсатора відкритого коливального контуру додаткового високочастотного генератора 44 давача кутового нахилу (кута атаки) для кожної з трьох аеродинамічних площин (24) першого типу. На фіг. 5 на зовнішньому контурі паралелепіпеда, який відображає мікросхему високочастотного генератора (44), затемнена його частка є символом винесеної назовні обкладинки (43) конденсатора. Із протилежного до нею боку на частині діелектричної поверхні торця пластини (37) каретки (38), яка безпосередньо перекриває у своїй проекції обкладинку (43) конденсатора, нанесено (наприклад, осадженням плівкового шару) смужку провідникового покриття, що у свою чергу переважно дуже тонким дротом приєднано до загальної приладної шини (корпусного терміналу для усіх приладів системи, "заземлено"). Розташування та ширина такої смужки (вона через обмеження графіки не показана на фіг. 5) вибрані такими, щоб повне перекриття проекції з обкладинкою (43) конденсатора високочастотного генератора (44) було досягнутим тільки в одному з крайніх положень, наприклад, при найбільшому негативному куті обертання (куті атаки) при нахилі аеродинамічних площини (24) першого типу. За цим відомим принципом дії конденсатора механічно змінюваної ємності аналогічну конструкцію ємнісного сенсора у давачі зміни положення рухомих механічних деталей використано також у прототипі. В запропонованій системі створений із провідних поверхонь як з обкладинок конденсатор із функціонально змінюваною ємністю в будь-яких проміжних положеннях забезпечив чисельне значення вимірів площ взаємного перекриття проекцій "заземленої" смужки з обкладинкою (43) конденсатора високочастотного генератора (44). Коли ця площа, наприклад, є меншою, а значить і меншою постає ємність створеного таким чином вимірювального конденсатора, це закономірно збільшує частоту автоколивань генератора (44) як вихідного сигналу давача (1), а таке шляхом визначення ємності відображає поточну величину кута нахилу обертанням відносно подовженої осі (27) кріплення, тобто фактичного кута атаки аеродинамічної площини із залежністю виду: більший кут атаки - більша частота на виході давача (1). Через підключений до нього перетворювач (2) типу "частота-код" поточний вимір стає переданим на приймальний регістр мікропроцесора (3) мікропроцесорного вузла (6). Для більшої точності та стабільності вимірів в умовах вібрацій, а також для забезпечення необхідної надійності самої апаратної складової запропонованої інформаційно-вимірювальної системи, що за призначенням перебуває у несприятливих умовах експлуатації, передбачено встановлення трьох і більше таких давачів (1) (див. поз. 43, 44), які усі підключено до перетворювачів (2) на входах мікропроцесорів (3) переважно різних мікропроцесорних вузлів (6) кластерів середнього рівня системи. Таким чином через постійне порівняння досягнуто більш точного вимірювання показника миттєвого стану тієї частини гнучкої несучої конструкції, що пов'язана із взаємним положенням та динамікою руху аеродинамічних площин (24) першого та (28) другого типів. Така оперативна інформація про фактичні числові значення відхилень існує у повсякчасно оновлених файлах спочатку у запам'ятовуючих пристроях мікропроцесорних вузлів (6) тільки кластерів на середньому рівні. Але ця інформаційна складова процесу керування не постає пов'язаною безпосередньо із самим механізмом миттєвого встановлення нахилу аеродинамічних площин першого типу. Вона лише створює ту частину комплексної картини із показників навколишнього середовища, яка стосується реального миттєвого відгуку при зміні постави аеродинамічних площин (24) першого типу на вироблені в системі та надіслані до засобів керування комплекси із сигналів, що досягли відповідних механізмів. У склад елементів механізму для здійснення програмованого руху аеродинамічних площин 24 першого типу у відокремленій від них через відсутність простого кінематичного зв'язку частині несучої конструкції включено додаткові елементи, а саме групи електромагнітів, що показані на фіг. 5 із позиціями 45-48 та 49-52. Вони є розташованими з орієнтацією магнітопроводів по радіусах кругу та послідовно один за одним уздовж контуру, а також є переважно змонтованими у спеціально створених для цього коробах із П-подібним перерізом, де їх ближня до центру та більш віддалена вертикальні стінки мають форму концентричних кілець. Усі означені електромагніти (45-52) підключені до джерела живлення системи так, що під керуванням з боку мікропроцесорних вузлів 12 кластера супервізорного рівня завдяки програмованій активації відповідних котушок через вплив на кожну з них струмових імпульсів, що сформовані швидкодіючими ключовими напівпровідниковими комутаторами командапарата, вони разом створили специфічну конструкцію, що в електротехніці відома як статор 21 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 синхронного електродвигуна. Наслідком активації достатньо великим імпульсним струмом (як для вибраних фізичних розмірів цих приладів) у межах кожної з котушок електромагнітів (45-52) постає встановленим потужне та швидко змінюване у часі магнітне поле, показники якого у кожну миттєвість задані програмою керування. Саме цим змінним полем здійснено керуючий вплив силовим шляхом через його взаємодію безпосередньо із відносно статичним магнітним полем від керамічних стрижнів (39), що їх змонтовано і механічно закріплено у діелектричній пластині (37) каретки (38). На фіг. 5 внизу надано просторове зображення фрагмента описаного статора із розміщеними між його електромагнітами діелектричними стрижнями (39), що можуть бути зрушеними як намагнічені деталі тільки разом із пластиною (37) каретки (38). Групи переважно по чотири електромагніти 45-48 та 49-52 із своїми котушками та їх підковоподібними магнітопроводами розташовано на площинах по контуру кільця зверху та знизу відносно спільної центральної площини так, що обернені один до одного вертикальні стрижневі частини із їх осями магнітопроводів електромагнітів мають спільними геометричні вертикальні осі їх симетрії, тобто проекції цих частин у площинах в середній зоні між ними переважно співпадають. При такому розташуванні горизонтальні частини підковоподібних магнітопроводів з котушками переважно приналежні лише двом паралельним площинам поза центральної зони та орієнтовані там по радіусах відносно спільного центра геометричних кілець, утворених електромагнітами (45-52). Відстань вздовж радіуса між вертикальними осями діелектричних керамічних стрижнів 39 із осьовою поляризацією намагнічування та вертикальними осями кожного електромагніта 45-52, встановленого також в напрямку відповідних радіусів, у обох групах, де в них котушки розташовані переважно на горизонтальних частинах їх магнітопроводів, складає практично рівні величини. Величина кроку у вимірі довжини дуги розташування вертикальних осей стрижнів цих електромагнітів та керамічних стрижнів (39) як магнітів у пластині (37) каретки (38) відносно до довжини кривої лінії у відповідних геометричних кільцях є однаковою, та її виражено дробом із знаменником кратним до кількості аеродинамічних площин (24) першого типу, використаних у запропонованій конструкції інформаційно-вимірювальної системи. Величина кроку у вимірі довжини дуги має бути встановленою згідно із наступною математичною формулою. С=2*p*R/n*K; де: С - довжина кроку по дузі у лінійному вимірі, мм; р=3.14159265 (закруглено); R - радіус кільцевої лінії розташованих по колу вертикальних осей стрижнів електромагнітів, мм; n=3 (або 4, або 6 - залежно від вибраної кількості послідовності фаз збудження групи електромагнітів статора електричного двигуна); К - кількість аеродинамічних площин (24) першого типу, розміщених в межах одного кола. Кожна з кареток 38 із вмонтованими в її пластині 37 керамічними стрижнями 39 в якості достатньо потужних постійних магнітів розташована у горизонтальній геометричній площині в системі так, що між усіма її деталями, оберненими до закінчень вертикальних частин підковоподібних магнітопроводів будь-якого з електромагнітів (45-52), існують завжди гарантованими повітряні зазори між їх площинними частинами (Фіг. 5, зображення в нижній частині). При цьому площинні закінчення керамічних стрижнів 39 є найбільш наближеними, але і вони мають проходити у таких передбачених конструкцією технологічних просвітах при зрушенні кареток 38 у горизонтальному напрямку по дузі кільця проміж вказаних пласких закінчень вертикальних полюсних частин усіх магнітопроводів. Вказані зазори у просвітах є змінювані за величиною і розраховані як мінімальні позитивні, коли вони встановлені для кожного із керамічних стрижнів (39) каретки (38) при її утриманні від радіального зміщення еластичними втулками (36) та під час обертання разом із віссю (27) кріплення до граничного спрямування по лініях або максимального позитивного (34) та негативного (35) відхилення (Фіг. 3) у межах допустимого кута (33) атаки при поточних коливаннях відносно центрального положення. Починаючи рух із центрального положення, що зображене на фіг. 5 в його нижній частині, керамічні стрижні 39 каретки 38 не торкаючись жодного конструктивного елемента проходять вільно усі можливі проміжні кутові положення як у горизонтальному (уздовж дуги кільця), так і у вертикальному напрямках, зміщуючись по досить короткій дузі із центром на осі (27) кріплення. Стартовим постає розташування намагнічених керамічних стрижнів (39) навпроти конструктивно визначеної кількості вертикальних стрижнів магнітопроводів (Фіг. 5), а завдяки магнітному тяжінню воно існує збереженим деякий час доти, поки хоча б на один з іншого числа електромагнітів (45-52) не надходить струмовий імпульс активації його котушки та збудження цим програмованих змін розподілу напруженості і магнітного потоку в окресленій зоні. 22 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 На фіг. 6 у верхній частині, як приклад, показані графіки на часових діаграмах струму, що пояснюють процес послідовної імпульсної активації електромагнітів. Типовий для запропонованої системи імпульс має специфічну форму його огинаючої на часовій діаграмі, тому що він є складеним із періодичного швидкозмінного струму, який за характеристиками близький до синусоїдального, що діє на полиці подовженого (відносно постійного у масштабі періодичного швидкозмінного струму) зміщення із заданою відповідно до програми руху каретки (38) різницю потенціалів при позитивному 53 чи негативному 54 імпульсі за напрямком електричного струму через вибрану котушку (40). Швидкозмінна складова струму у поперекових котушках 40 як у електромагнітному трансформаторі із Ш-подібним магнітопроводом, де стрижні 41 фактично замикають цю спільну складову магнітного потоку від найближчих котушок 45-52, які тут є насадженими і на верхні, і на нижні периферійні частини цього об'єднаного магнітопроводу, створила достатньо велику за амплітудою наведеної гармонійної електрорушійної сили взаємоіндукції потугу на її виводах. З котушок 40 випрямлена напівпровідниковим мостом нестаціонарна складова струму через навантаження призвела до монотонного зростання заряду і спонукала до відповідного підвищення напруги на конденсаторі інтегруючої чарунки - наростаюча частина графіку на епюрі 55. Накопичення заряду на конденсаторі практично не залежить від полярності полиці у постійній складовій магнітної активації - полярності напруги імпульсу, тому що трансформатор змінного струму передав на його вихід з котушки 40 лише швидко змінювану складову потоку електромагнітної енергії. Згідно із пропозицією використано діелектричні керамічні магнітні матеріали, що забезпечило мінімальні втрати електромагнітної енергії при збудженні вихрових струмів Фуко та паразитного розігріву конструктивних деталей магнітопроводів. Залишковий рівень магнітної сталої у поляризованому (намагніченому при виробництві) матеріалу з великою коерцитивною силою та циклічно перемагнічених магнітом'яких феритів постає цілком достатньою для роботи вказаної конструкції як ефективного електромагнітного трансформатора із описаними магнітопроводами та діамагнітними зазорами вже при середній (від однієї до двох сотень кілогерців) частоті первинного швидкозмінного струму у котушках (45-52). Цим засобом постійно та надійно забезпечене електроживлення наявних електронних блоків мікропроцесорних вузлів (6) шляхом керованого розряду накопичувальних конденсаторів інтегруючих чарунок (42) через змонтовані поруч з ними та включені вже у силову мережу локальні стабілізатори напруги в якості додаткових технічних складових в конструкції (на кресленнях вони не показані так само, як інші типові засоби живлення мікропроцесорів та підключених до них вхідних блоків). Напрям окремих струмів - фазування та їх часова синхронізація - для усіх котушок пар електромагнітів 45 і 49, 46 і 50 та інших, які розташовані на протилежних сторонах від геометричної площини кільця руху каретки (38) з її керамічними стрижнями (39) як постійними магнітами, виконано при керуванні цим процесом групою мікропроцесорних вузлів 12 кластера супервізорного рівня, до яких підключені вхідні сигнальні кола ключових комутаторів струму живлення, розташованих у відповідних команд-апаратах. Ця частина конструкції не описана окремо як така, що ґрунтується на добре відомих технічних рішеннях та має стандартне промислове приладне забезпечення для засобів автоматизованого керування, наприклад, для устаткування із станками числового програмного управління. Взаємно узгоджений струм в імпульсах 53 чи 54 від діючих полиць напруги направлено через вибрані котушки так, що вектори сил магнітної взаємодії спрямовані в один бік, коли вертикальні осі магнітопроводів (45 і 49, 46 і 50) майже співпадають із положенням осей керамічних стрижнів (39) каретки (38). У вказаному фрагменті динамічного режиму в межах електромагніта 45 існує силове поле, яке збуджене, наприклад, негативним струмовим імпульсом 54, і це спонукало до виникнення в конструкції відштовхуючої сили із вектором 56. Вектор сили взаємодії у магнітному полі умовно показано розширеною стрілкою в середній частині фіг. 6. У цей самий час пропущений через котушку інший негативний струмовий імпульс, який за умови конструктивно почергово оберненого розташування полюсів стрижнів (39) відносно магнітного потоку в магнітопроводі електромагніта 49, збудив силу взаємодії із іншим спрямуванням - з вектором 58 сили взаємного тяжіння цих деталей. Синхронно із вказаним фрагментом процесу протягування та відштовхування керамічних стрижнів біля протилежної сторони каретки (38) із розташованою тут іншою парою керамічних стрижнів (39) постає розгорнутим паралельний фрагмент процесу вже їх магнітної взаємодії з полем, що збуджено електромагнітами пари 46 та 50, які постали з протилежних сторін площини кругу. Спрямовані в один бік струми через котушки у цих електромагнітів викликали сили магнітної взаємодії із відповідними векторами 59 та 60, які за напрямком діють протилежно 23 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 до сил з векторами 56 та 58. Електромагніти 47 і 49 та 46 і 50 розташовані безпосередньо в зоні найбільш потужної взаємодії із намагніченими керамічними стрижнями 39 однієї пластини 37 каретки 38. Рівнодіюча сил з векторами 59 та 60 разом із рівнодіючою сил з векторами 56 та 58 спрямовані в різні боки і викликали в основному саме обертаючий момент із центром, який є дуже наближеним до центральної геометричної лінії осі (27) кріплення пластини (37) каретки (38). Як результат цього силового втручання і досить сталого стану із поступовим обертальним зрушенням вузол каретки (38), а з нею і прикріплена жорстко уся аеродинамічна площина (24) першого типу постали потроху повернутими та зайняли положення із гострим кутом відносно горизонтальної площини, близьким за величиною до граничного. У графічному прикладі, який подано на зображені в нижній частині фіг. 6, цей стан спрямування площини (24) першого типу відповідає орієнтації подовженої осі еліпса профілю її нервюр по лінії 35 (Фіг. 3) із негативним кутом поперекового нахилу. При зміні сигналів керування на інші подібні, струми через котушки електромагнітів набули прямо протилежних до вказаних раніше напрямків, а сама каретка (38) разом із прикріпленою до неї аеродинамічною площиною (24) першого типу тепер зайняла своє майже крайнє положення із поворотом до набуття найбільшого позитивного кута атаки по лінії 34 (зображення на тлі контуру кола обертання на фіг. 6). Подальша активація котушок електромагнітів 45 і 49 та 46 і 50 із вказаним розподілом напрямків струмів (полиць напруги імпульсів) створило умови, за яких діючі сили магнітного поля змогли би достатньо міцно заблокувати будь-який подальший рух каретки (38) та зв'язаної з нею аеродинамічної площини (24) першого типу. Тому для забезпечення в наступній фазі руху надбання нового положення цих з'єднаних з віссю (27) кріплення конструктивних утворень стало необхідним в першу чергу нейтралізувати гальмівні магнітні сили між постійними магнітами та електромагнітами, що були активовані струмом. Саме для досягнення ефекту відштовхування для найшвидшого зменшення гальмуючих сил із векторами 56, 58 та 59, 60 використано протилежні за напрямами, які існували до цього моменту, інші збудження імпульсами струму котушок 45, 49 та 46, 50. Намагнічені керамічні стрижні (39) відносно до П-подібних магнітопроводів в цей час мають перебувати практично навпроти них так, коли б їх чотири геометричні осі майже співпадали, але в цей час при зрушенні осі стрижнів так і не досягли центрального положення. Зміна на протилежне положення полиці напруги в одному з імпульсів, що веде до протилежного напряму струму активації котушки, наприклад, позначеному позицією 61, обернула раніше діючу тут силу тяжіння до найближчих полюсних магнітопроводів на силу їх взаємного відштовхування. Таке суттєво зменшило результуючу силу утримування каретки (38), яка існувала для збереження раніше набутого максимального значення кута поперекового обертання аеродинамічної площини. Наслідком такого вже під дією зовнішньої сили, якою тут виступає сила опору повітряного середовища, що завжди діє під час руху на нахилену аеродинамічну площину (24) першого типу, остання постає трохи оберненою навколо вісі (27) кріплення до отримання нового просторового положення. Через відносно повільне поступове спадання та наступне зростання струму через фізичну властивість індуктивності котушки електромагніту, а також програмовану штучну подовженість паузи (відсутність дії струмового імпульсу) просторовий стан аеродинамічної площини (24) першого типу незмінно набуває нового виду, коли через примусову зміну розподілу величин зазорів між полюсними закінченнями магнітопроводів та керамічних стрижнів (39) знову буде відновлено рівновагу між силою аеродинамічного опору та магнітними силами-антагоністами. Вони збуджені електромагнітами із протилежними у порівнянні з раніше встановленим напрямком струмів 54 та 57, але у цей час поступово зростає струм у котушці під дією полиці напруги в імпульсі 61 як початок нової фази в подовженому процесі керування і наступному за часом існування імпульсу 57. У цей самий час струм 62 через іншу котушку діє так, наче подовжено ефект від струму в імпульсі 54 для її активації, який ще не поміняв свою спрямованість. Збережена у цей час сила від збудженого ним магнітного потоку в магнітопроводі слугує ефективним демпфером, наприклад, від різкого обертання та зміни цим самим наступного поперекового нахилу аеродинамічної площини (24) першого типу під дією прикладеної зовнішньої сили аеродинамічного опору. Наслідком вказаного розвитку змін у фазах процесу керування постає існування деякий час певного проміжного положення із таким нахилом (кутом атаки) площини (24) першого типу, який для цього було попередньо обчислено із застосуванням мікропроцесора при реалізації тієї частини програми, де результатом обрахунку обумовлено цілеспрямований перехід до шуканого поточного стану гнучкої конструкції. 24 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 Динамічна зміна подовженості часу існування сталих полиць струмових імпульсів - широтноімпульсна модуляція - у межах циклічно повторюваного періоду та їх програмований перехід з позитивного напрямку активації відповідних котушок на негативний і навпаки забезпечили динамічно збалансовану протидію змінюваним в результаті руху величинам сили аеродинамічного опору при встановлених попередньо обрахованих (прогнозованим за програмним аналізом) значенням кутів атаки як результату комплексного автоматичного керування шляхом цілеспрямованих послідовних змін у величинах миттєвого поперекового нахилу для кожної аеродинамічної площини (24) першого типу. Описаний вище фрагмент реалізації процесу керування відображає певний ідеалізований розгляд динаміки станів руху будь-якої каретки (38), але тільки коли її керамічні стрижні (39), як постійні магніти, розташовані на відносно малій відстані по дузі від центрів полюсних закінчень активованих електромагнітів. На ці стрижні в такому режимі діють механічні сили через програмовано змінюваний по закону керування електричний струм активації, коли його спрямованість встановлено, наприклад, відомим підключенням котушок в одну із діагоналей мостового електричного кола, де по сторонах постають почергово ввімкненими керовані по парам ключові комутатори команд-апарата, а у другій діагоналі діє постійна напруга від джерела живлення. Суттєво більшу частину часу керамічні стрижні (39) у вигляді вмонтованих в пластину (37) її активних деталей разом із кареткою (38) та віссю (27) кріплення існують у чітко визначеному динамікою процесу проміжному стані. Тут геометрично вони перебувають поза зоною найбільш потужного силового впливу магнітного поля із найбільшим значенням його часткової напруженості. Але взаємодія магнітів у цій зоні не обмежена тільки вертикальними складовими векторів напруженості через віддаленість від площин зрізів магнітопроводів котушок 45, 49 та 46, 50, а відповідає результату впливу рівнодіючої від суми магнітних сил із довільно орієнтованим спрямуванням її вектора. У цьому стані такий вектор 63 (Фіг. 6, середина шляху руху каретки) виглядає спрямованим із нахилом до вертикальної і горизонтальної площин тому, що у порівнянні із його вертикальною складовою (в положенні між електромагнітами вона взагалі може бути зменшеною майже до нуля) існуюча горизонтальна складова рівнодіючої сили магнітного тяжіння або відштовхування є невеликою, але на відстані від закінчень магнітопроводів із зростанням дистанції її модуль набагато повільніше зменшує свою величину із зміщенням по дузі. В цій зоні одночасно усі шість із восьми електромагнітів, які у такому прикладі конструкції безпосередньо з усіх боків оточують чотири намагнічених керамічних стрижні (39) спонукають каретку (38), а з нею як саму аеродинамічну площину (24) першого типу, так і зв'язану з нею через вісь (27) аеродинамічну площину (28) другого типу, зрушити по дузі великого кола в горизонтальному напрямку. Це явище умовно позначено дуговою стрілкою як вираз поступового розвороту напрямку вектора сумарної сили взаємодії при переміщенні каретки з магнітами. Такий ефект і описана форма руху є характерними для лінійного синхронного електродвигуна як досить специфічної за функцією електричної машини. У запропонованій конструкції моторної частини системи передбачено розміщення усіх кареток (38) рівномірно по контуру кільця на однаковій та відносно великій відстані від геометричного центра так, що разом із усіма спрямованими відцентрово по радіусах і скріпленими разом по групах аеродинамічними площинами (24 та 28) усі елементи утворили два окремих, але подібних за формою один до одного дискових ротори 64, 65 (Фіг. 7 та Фіг. 8), які здатні обертатися у протилежних напрямках. На фіг. 6 в нижній частині креслення умовно як множину прямих та кільцевих ліній, по яких розміщена лише ближча до спостерігача частина керамічних стрижнів 39, показано принципову форму одного з них, як сукупність головних геометричних напрямків розміщення активних деталей. Інший ротор 65 із таким самим набором керамічних стрижнів (39) є розташованим у паралельній площині, і він так само оснащений набором кареток (38), які з вказаними раніше гарантованими зазорами мають конструктивну можливість руху проміж пласких полюсних закінчень магнітопроводів, але вже своїх електромагнітів (45-52) із набору, тотожного першому. Цей ротор так само зміщується під дією засобів збудження руху завдяки змінюваному розподілу складових загального магнітного поля навколо постійних магнітів керамічних стрижнів (39) разом із віссю (27) кріплення та пластиною (37) каретки (38), але для нього такий поступальний рух є завжди протилежним за напрямком відносно першого ротора 64. Обидва ротори (64, 65) розташовані так, що вони мають спільну центральну вертикальну геометричну вісь, яка є перпендикулярною до їх площин, та можуть обертатися навколо неї в протилежних напрямках під сумісною дією як сил від взаємодії магнітних полів, так інших сил на 25 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 зразок сил інерції та ще й тих, які виникають при переміщенні в середовищі повітря із численними струменями, що з різними швидкостями потоків у їх межах обтікають з'єднані разом у цих роторах аеродинамічні площини (24) першого та другого (28) типів. Розгін (збільшення кутової швидкості) роторів, обертальний рух із постійною швидкістю, гальмування набутого за інерцією обертання чи зміна його характеру залежно від впливу струменів повітря на аеродинамічних площинах в запропонованій конструкції системи здійснено шляхом безперервного формування різних за подовженістю та їх полярністю струмових імпульсів активації котушок електромагнітів, де превалюють послідовності із кількох подібних блоків переважно згрупованих як знакозмінні імпульси (показані на фіг. 6 із позиціями 66, 67 та 68), де їх генерація за діючими фрагментами паралельних програм руху забезпечена наявними трьома мікропроцесорними вузлами (12) кластера супервізорного рівня інформаційновимірювальної системи, що діють узгоджено завдяки резервованій структурі їх об'єднання каналами (13) міжвузлових зв'язків. Кілька подібних блоків із електричних струмових імпульсів у кожній серії складають у циклічно безперервному потоці енергії збудження найменшу функціональну частку в межах як часового, так і кутового кванту дії із рухом кареток по дузі свого кола. При цьому таке одиничне квантове і практично лінійне геометричне зміщення каретки 38 з одночасним поворотом її пластини 37 разом із аеродинамічною площиною 24 першого типу навколо центру осі 27 кріплення є суттєво меншим за довжину розрахункового кроку розташування електромагнітів. Для кожного вказаного кванта функціонування відповідно з кутовим положенням означеної каретки (за її номером у кожному роторі) в межах сектора круга обертання одночасно засобами трьох мікропроцесорних вузлів (12) кластера супервізорного рівня і паралельно з отриманими даними, надісланими як результат роботи аналогово-цифрових перетворювачів (2), що відображає фактичне поточне просторове положення пластини 37 каретки 38 (дані надходять від мікропроцесорів 3 на середньому логічному рівні у підсистемах 7 та 8), постали обчисленими у кожну миттєвість машинного часу через відповідні внутрішні параметри для встановлення провідності струмових ключів у виконуючих команд-апаратах керування. Також в цю миттєвість із певною часовою затримкою (але не більшою, ніж обчислювальна операційна) кожним з цих команд-апаратів розпочато генерацію серії поточних струмових імпульсів, при якій будь-коли у реальному часі є досягнутим встановлення нових значень зрушень (із обрахованою величиною корекції) для заданого кута атаки як поперекового нахилу приєднаної до каретки аеродинамічної площини 24 першого типу. При цьому її кругова позиція у вигляді кута розвороту по колу обертання є визначеною, наприклад, відносно ключового ("нульового") електромагніта, в складі імпульсів керування у якому конструктивно завжди є відсутньою швидкозмінна складова синусоїдального збудження. Тому при обертанні ротора факт проходження біля нього кожної з кареток (38) стає визначеним по відсутності у серії одного з імпульсів (55) на виводах котушки 49, енергія якого конструктивними засобами спрямована для циклічного збільшення напруги від заряду на конденсаторі інтегруючої чарунки 42. Змінними параметрами інформаційного середовища для безперервних обчислень в робочому режимі виступили: набута кутова швидкість обертання кожного з роторів; відхилення усієї конструкції від програмованого напрямку переміщення в просторі; поточна орієнтація відносно горизонту площини обертання роторів і кут загального розвороту механічної несучої конструкції системи як спрямування її локальних осей координат; фактично досягнуте положення з координатами у глобальному просторі та інше. До цього переліку мають бути включеними також показники операційної потужності обчислювального комплексу та частотні характеристики реактивних (індуктивних) елементів електромагнітів як органів для здійснення автоматичного управління. Залежно від фактично існуючої на момент обрахунку конфігурації шляхів передавання інформаційних сигналів каналами (5,9-11, 13-15) міжвузлових зв'язків показник продуктивності при обчисленнях можливо постає змінюваним чисельно, але завдяки активному резервуванню технічних складових передавальних конструкцій та інформаційних масивів із вимірів, загальний діючий інформаційний потік даних для реалізації програм аналізу довкілля та керування завжди є безперервним. Напрямок обертання ротора (за годинниковою стрілкою чи проти неї) вплинув на особливості виконання аеродинамічних площини 28 другого типу, а саме на спрямування у протилежні боки нахилу середніх ліній нервюр, які утворюють профіль, де він має найбільшу відмінність в задній торцевій частині (29). Орієнтовна загальна форма аеродинамічних площин (28) другого типу залежно від різновиду як для лівого гвинта 69, так і правого гвинта 70 показані на фіг. 7 справа вгорі. Характерними є підняття в зоні задньої торцевої частини 29 тільки тієї кромки профілю, що спрямована назустріч по ходу обертання. У обох цих профілів стан підйому 26 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 для передньої торцеві частини (30) виконаний мінімальним і практично однаковими через необхідність приєднання в їх заглибленнях 32 осей 27 кріплення на одному геометричному рівні у площині обертання роторів. Різновиди аеродинамічних площин (28) другого типу, означені як 69 та 70 у зібраній конструкції системи, представлені набором із переважно 9 одиниць кожної форми для утворення базової центральної частини одного з двох роторів (показані на фіг. 7 у центрі). Саме із такою формою профілю за відомими закономірностями в аеродинаміці вони створюють при обертанні разом у протилежних напрямках інтенсивний подвійний потік повітря у напрямку донизу, цілком здатний компенсувати вагу маси конструкції та утримувати її в стані польоту весь час, який обмежено лише ресурсом джерел живлення електромагнітів. До складу підйомної сили за певних умов може бути доданою складова сили, що виникає при обдуванні прискореним повітрям нижнього ротора як суцільної плескатої поверхні. Це явище також впливає на застосований обчислювальний алгоритм при керуванні. Крім самих аеродинамічних площин до інших рухомих з обертанням частин у кожному з роторів увійшов один циліндричний двостінний стакан 71, до якого перпендикулярно до утворюючих ліній його зовнішньої циліндричної поверхні по радіусах на рівній відстані у кутовому поділі прикріплено своїми задніми торцевими частинами (29) аеродинамічні площини (28) другого типу. В обох різновидах роторів (залежно від формами 69 або 70 для площин 28) порожнина між зовнішньою та внутрішньою стінками циліндричного двостінного стакана 71 разом із конструктивними порожнинами між зовнішніми оболонками відповідних аеродинамічних площин (28) другого типу переважно постала зв'язаною через отвір у фіксуючій втулці 72 (Фіг. 7, розріз на фронтальній проекції). Використавши вказаний технологічний центральний отвір у втулці 72 прокладено провідникові лінії: силові для живлення мікропроцесорів та високочастотні мережеві коаксіальні мікрокабелі чи симетричні звиті пари. Це виконано так само, як і при з'єднанні віссю 27 кріплення між собою аеродинамічних площин (24) першого та другого (28) типів, де проводи проходять наскрізь центральною порожниною від елементів каретки (38), коли частина з них з'єднує споживачів електроструму із накопичувальними конденсаторами інтегруючих чарунок 42 та котушок 40 для відновлення заряду під дією імпульсів 55. На відміну від приєднання аеродинамічних площин (24) першого типу, яке в системі за конструкцією гарантує обертання у межах гострого кута, для збереження належної постійної орієнтації в роторі для аеродинамічної площини (28) другого типу через недопущення її самовільного обертання навколо центру своєї фіксуючої втулки (72) під дією будь-яких сторонніх сил використано додаткове закріплення по радіусу фланця задньої торцевої частини (29), наприклад, штифтом, встановленим у передбаченому отворі. Обидва циліндричні двостінні стакани (71) насаджені на протилежні кінцеві частини внутрішнього циліндра 73, котрий виконаний як центральна опора для усіх рухомих частин у гнучкій несучій конструкції інформаційно-вимірювальної системи. Самі циліндричні двостінні стакани (71) з'єднані із внутрішнім циліндром 73 так, що вони можуть вільно і з мінімальним тертям обертатися, але при цьому їх зміщення в осьовому напрямку уздовж спільної центральної осі є надійно заблокованим конструктивними елементами. З боку внутрішньої стінки циліндричних двостінних стаканів 71 та зовнішньої стінки внутрішнього циліндра 73 утворено достатньо великий просторовий зазор. У цьому спеціально передбаченому зазорі проміж фіксуючими кільцями, наприклад, в проточці циліндричних корпусів як деталей (поз. 71 та 73 на фіг. 7 справа) вставлено внутрішню та зовнішню обойми підшипників катання 74. В запропонованій конструкції передбачено по одній парі підшипників катання 74 на кожному циліндричному двостінному стакані (71), які виконані як радіально-упорні із переважно подвійними рядами елементів катання, наприклад, кульок 75 та спільним упорним елементом гребенем - між ними у середній частині кожної обойми. Між електронними пристроями, які розташовані у внутрішньому циліндрі (73), а ними є мікропроцесорні вузли 12 кластера супервізорного рівня, і шістьома мікропроцесорними вузлами 6 кластерів вищого рівня із обох підсистем (7 та 8) для їх надійного інформаційного з'єднання відповідні канали 14 та 15 міжвузлового зв'язку виконано як безумовно бездротові за конструкцією та переважно оптичні за принципом їх фізичної форми дії. Але як функціонально здатні альтернативні реалізації можливе створення електроакустичних (ультразвукових) чи електротехнічних (ємнісних або індуктивних) передавально-приймальних пар приладів. Найбільшу продуктивність та надійність з числа 27 UA 115187 C2 5 10 15 20 25 30 35 40 45 50 55 60 можливих альтернатив мають показувати радіочастотні вузько смугові бездротові розв'язки як набір із частотно-вибіркових інформаційних каналів. Для забезпечення належної якості взаємного кутового зрушення у вигляді необмеженого у часі вільного обертання циліндричних двостінних стаканів (71) навколо внутрішнього циліндра (73) на довільну кількість обертів у протилежних напрямках швидкісний дуплексний зв'язок фізично здійснений у спеціальній зоні, що є закритою від зовнішніх світлових променів. Це виконано переважно в зоні між парами підшипників катання 74, де деталі внутрішнього циліндра 73 та двох однакових циліндричних двостінних стаканів 71 є найбільш наближеними та розташованими на відстані, яка за конструктивним виконанням постає практично незмінною (на фіг. 7 подано збільшений розріз у правій колонці всередині). Стабільність збереження радіальної (горизонтальної) та вертикальної відносних позицій трьох з'єднаних рухомих корпусних частин гнучкої несучої конструкції інформаційновимірювальної системи фактично цілком залежить лише від якості виконання та стійкості до зносу підшипників (74), що на сьогодні із використанням сучасних матеріалів та застосуванням технологій прецезійного формоутворення механічних деталей для цих розмірів не становить будь-якої суттєвої проблеми. Орієнтовна максимальна швидкість обертання описаного вище ротора в запропонованій системі лежить в діапазоні (залежно від габаритів) від 500 до 3000 обертів на хвилину чи це 3000…18000 градусів в секунду. Граничні експлуатаційні навантаження становлять не більше 490 Η (50 кгс) при радіусі внутрішнього циліндра близько 75 мм. За таких параметрів слід очікувати можливі неконтрольовані відносні симетричні зміщення на рівні не більше за 0.05 мм. Таке дозволило використання відомих достатньо ефективних та швидкодіючих оптоелектронних гальванічних розв'язок для безпровідних каналів передавання даних, що розташовані у "розривах" електричних з'єднань, із практично повним збереженням потрібної продуктивності інформаційного обміну між мікропроцесорними вузлами (12) кластерів на супервізорному рівні та із іншими логічними рівнями у підсистемах (7 та 8) в межах запропонованої системи. Як варіант конструктивної реалізації спеціалізованої оптоелектронної пари, де вона переважно складена із суміжно розташованих рухомих корпусів у вигляді двох пар кілець, що виконані із прозорого пластику, наприклад акрилу чи спеціального оптичного матеріалу, як CR39 для виготовлення лінз гарячим пресуванням. Кільця виконано у відповідності із внутрішнім діаметром циліндричних двостінних стаканів (71) та зовнішнім діаметром внутрішнього циліндра (73). Подвійний набір із оптоелектронних пар складають такі прозорі кільця, де в передавальному комплекті 76 внутрішнє кільце, яке охоплює внутрішній циліндр (73), оснащене не менш ніж трьома кільцевими групами випромінюючих світлодіодів для передавання світловими імпульсами інформаційних сигналів від мікропроцесорних вузлів (12) кластера супервізорного рівня в напрямку до мікропроцесорних вузлів 6 через посередництво суміжного з ним у приймальному комплекті 77 іншого аналогічного кільця трохи більшого діаметра, оснащеного групами швидкодіючих діодних фотоприймачів. Саме кільце з фотоприймачами є закріпленим нерухомо у внутрішньому діаметрі отвору циліндричного двостінного стакана (71) та обертається разом із ним. Аналогічно та протилежно за функціональним призначенням, у приймальному комплекті 77, що є орієнтованим на отримання інформації від нижчих, ніж супервізорний, логічних рівнів системи, внутрішнє прозоре кільце оснащене наборами трьох груп швидкодіючих діодних фотоприймачів, а зовнішнє кільце - світлодіодами, підключеними до мікропроцесорних вузлів 6 верхнього рівня в одній із підсистем (7 або 8), коли воно розташоване навпроти внутрішнього кільця в отворі циліндричного двостінного стакана(71). В порожнині циліндричних двостінних стаканів (71) між їх стінками зосереджені, наприклад, на збірних платах технічні засоби трьох мікропроцесорних вузлів 6 та їх інтерфейсні пристрої 4 із адаптерами до оптичних елементів. Живлення струмом для створення світлового потоку у світлодіодах, а також сприйняття сплесків напруги від фотодіодів забезпечене підключенням цих елементів електронних мікросхем до формуючих засобів інтерфейсних пристроїв 4 відповідних мікропроцесорних вузлів. Згідно із цією конструктивною пропозицією в системі реалізовані на фізичному рівні канали 14 та 15 міжвузлових зв'язків між кластерами на вищих логічних рівнях підсистем 7 і 8 та кластером із мікропроцесорних вузлів 12 на супервізорному рівні інформаційно-вимірювальної системи так, що це повністю задовольняє вимоги по продуктивності та надійності: гранична швидкодія обміну сигналами досягає 5 гігабіт за секунду, а по 6…18 оптичних діодів, які розміщено у кожній з трьох проточок у прозорому матеріалі по контуру будь-якого з кілець практично виключають перерив у зв'язку через відключення одногодвох з них або помітну втрату початкової прозорості у технологічному матеріалі. 28
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01D 1/00, G01D 9/00, G01S 1/02
Мітки: система, інформаційно-вимірювальна
Код посилання
<a href="https://ua.patents.su/49-115187-informacijjno-vimiryuvalna-sistema.html" target="_blank" rel="follow" title="База патентів України">Інформаційно-вимірювальна система</a>
Інформаційно-вимірювальна система для гідрогеологічних свердловин
Номер патенту: 54528
Опубліковано: 10.11.2010
Автори: Цибулевський Юрій Євгенович, Азарян Альберт Арамаісович, Дрига Володимир Володимирович
МПК: G01F 23/00
Мітки: система, гідрогеологічних, інформаційно-вимірювальна, свердловин
Формула / Реферат:
Інформаційно-вимірювальна система для гідрогеологічних свердловин, що містить датчики температури та мінералізації води, які через свої АЦП з'єднані з входами мікропроцесора, вихід якого через радіопередавач з'єднано з реєструючим пристроєм, яка відрізняється тим, що вона обладнана блоком керування живленням системи і датчиком контакту корпуса зонда з водою, виходи якого з'єднано з командним входом мікропроцесора і блоком керування живленням...
Інформаційно-вимірювальна система
Номер патенту: 111941
Опубліковано: 11.07.2016
Автори: Конельський Володимир Анатолійович, Конельський Віктор Анатолійович, Манжело Валерій Олександрович
МПК: G01D 21/00
Мітки: інформаційно-вимірювальна, система
Формула / Реферат:
Інформаційно-вимірювальна система, що включає давачі (1) з вимірювальними перетворювачами (2) та мікропроцесори (3) з інтерфейсними пристроями (4), і з них сформовано основу мікропроцесорного вузла (6), а також канали міжвузлових зв'язків із залученням яких у межах системи утворено автономну мережу передавання цифрових кодів, яка відрізняється тим, що мікропроцесорні вузли (6) розподілені на окремі функціональні рівні системи і в межах...
Інформаційно-вимірювальна система
Номер патенту: 111957
Опубліковано: 11.07.2016
Автори: Конельський Володимир Анатолійович, Конельський Віктор Анатолійович, Манжело Валерій Олександрович
МПК: G01D 21/00
Мітки: система, інформаційно-вимірювальна
Формула / Реферат:
Інформаційно-вимірювальна система, що включає давачі (1) з вимірювальними перетворювачами (2) та мікропроцесори (3) з інтерфейсними пристроями (4), і з них сформовано основу мікропроцесорного вузла (6), а також канали міжвузлових зв'язків, із залученням яких у межах системи утворено автономну мережу передавання цифрових кодів, в якій мікропроцесорні вузли розподілені на окремі функціональні рівні в межах системи, і мікропроцесорні вузли для...
Лазерна інформаційно-вимірювальна система
Номер патенту: 23214
Опубліковано: 10.05.2007
Автор: Коломійцев Олексій Володимирович
МПК: G01S 17/66, G01S 17/42
Мітки: лазерна, інформаційно-вимірювальна, система
Формула / Реферат:
Лазерна інформаційно-вимірювальна система, що містить приймач-передавач (ПРМ-ПРД), пристрій формування каналів, пристрій формування сигналів, пристрій формування сигналів похибки, виконавчі механізми по кутах азимута і місця та вимірювальні канали похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β', яка відрізняється тим, що додатково після ПРМ-ПРД введений інформаційний...
Інформаційно-вимірювальна система
Номер патенту: 111968
Опубліковано: 11.07.2016
Автори: Манжело Валерій Олександрович, Конельський Володимир Анатолійович, Конельський Віктор Анатолійович
МПК: G01D 1/00, G01D 21/00
Мітки: інформаційно-вимірювальна, система
Формула / Реферат:
Інформаційно-вимірювальна система, що включає давачі (1) з вимірювальними перетворювачами (2) та мікропроцесори (3) з інтерфейсними пристроями (4), з них сформовано основу мікропроцесорного вузла (6), а також канали міжвузлових зв'язків, із залученням яких утворено автономну мережу передавання цифрових кодів, де в межах системи мікропроцесорні вузли розподілені на окремі функціональні рівні, і мікропроцесорні вузли для кожного з цих рівнів...
Попередній патент: Ентропійне кодування різниць векторів руху
Наступний патент: Спосіб комбінованого лікування раку прямої кишки
Випадковий патент: Спосіб вимірювання стисливості твердих тіл