Спосіб наведення літального апарата на ціль
Номер патенту: 100759
Опубліковано: 10.08.2015
Автори: Соченко Петро Степанович, Синєглазов Віктор Михайлович, Калмикова Лариса Миколаївна, Мухіна Марина Петрівна, Власюк Ірина Іванівна, Тупіцин Микола Федорович, Крючков Валерій Валерійович

Формула / Реферат
Спосіб наведення літального апарата (ЛА) на ціль, в якому використовують систему глобального позиціонування штучних супутників Землі, який відрізняється тим, що координати цілі задають при пуску літального апарата (ЛА) і проводять порівняння з координатами поточного положення літального апарата в системі глобального позиціонування штучних супутників Землі.
Текст
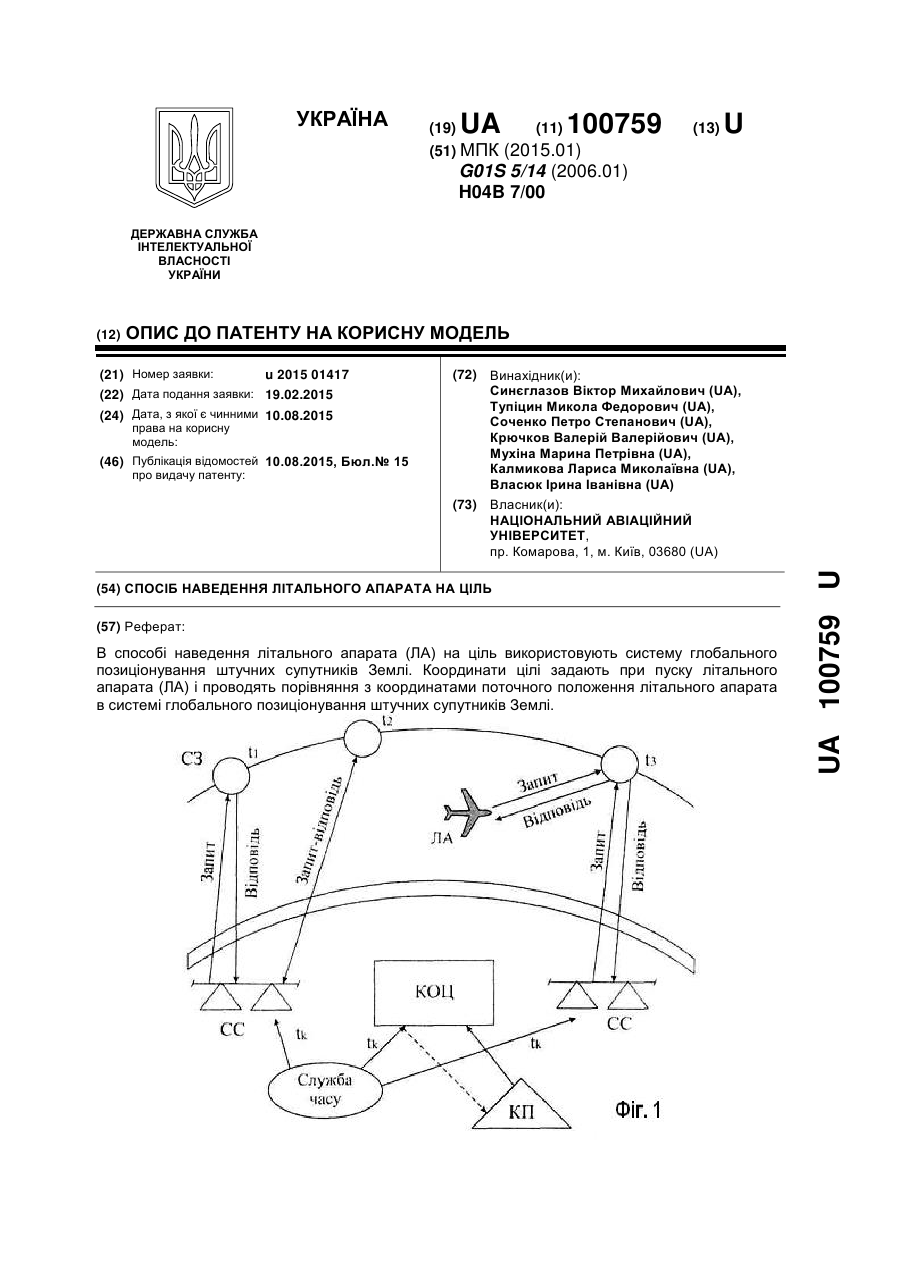
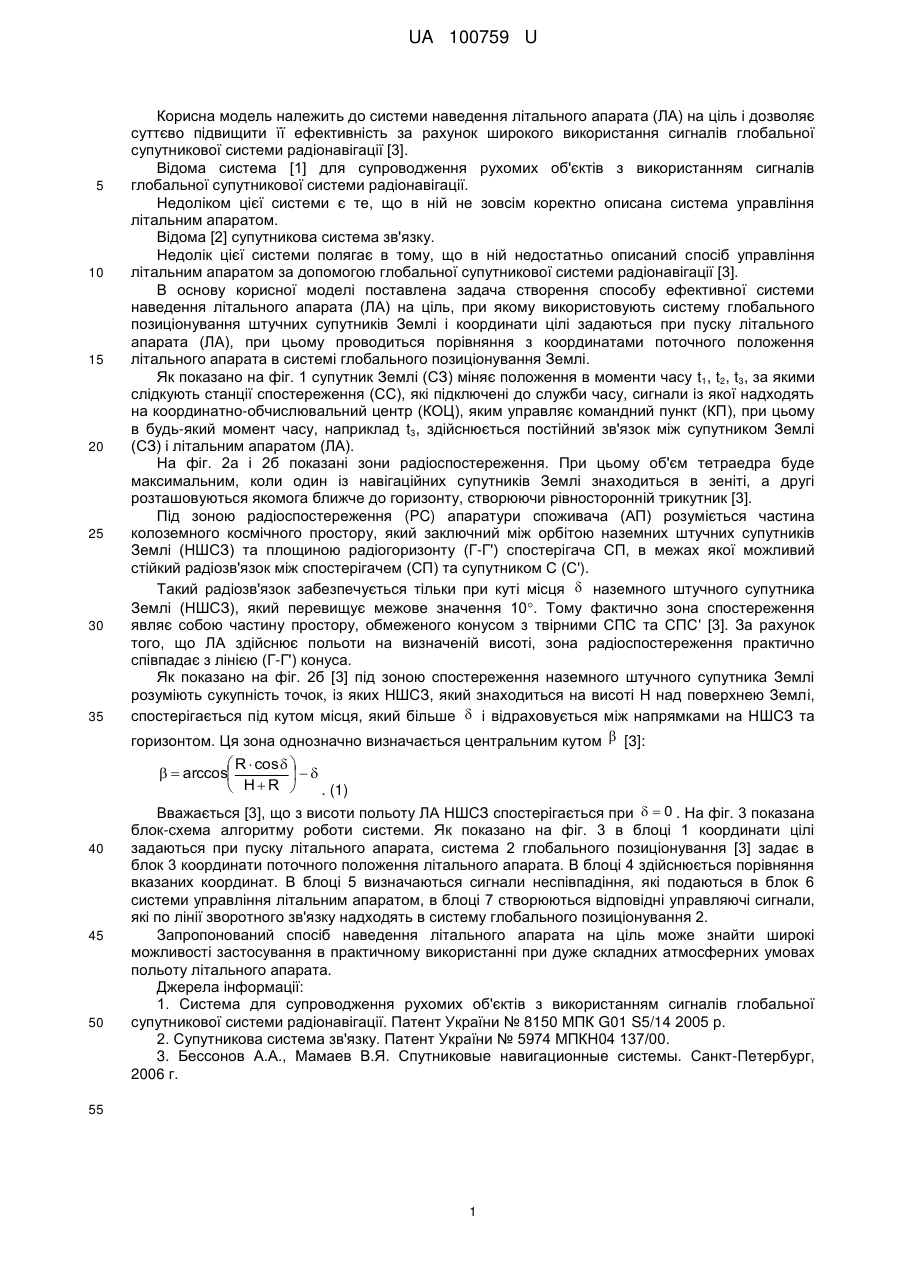
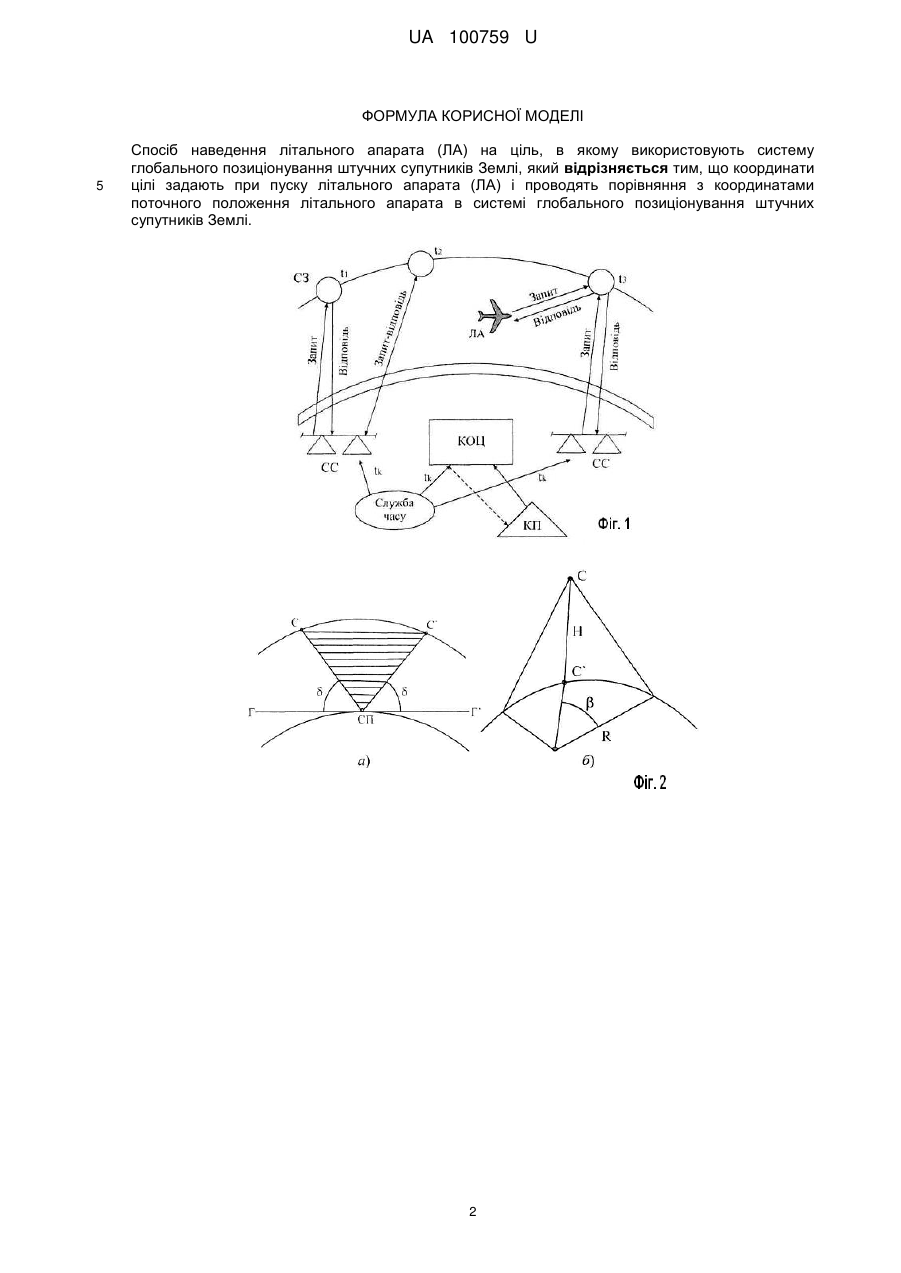
Реферат: В способі наведення літального апарата (ЛА) на ціль використовують систему глобального позиціонування штучних супутників Землі. Координати цілі задають при пуску літального апарата (ЛА) і проводять порівняння з координатами поточного положення літального апарата в системі глобального позиціонування штучних супутників Землі. UA 100759 U (12) UA 100759 U UA 100759 U 5 10 15 20 25 30 35 Корисна модель належить до системи наведення літального апарата (ЛА) на ціль і дозволяє суттєво підвищити її ефективність за рахунок широкого використання сигналів глобальної супутникової системи радіонавігації [3]. Відома система [1] для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації. Недоліком цієї системи є те, що в ній не зовсім коректно описана система управління літальним апаратом. Відома [2] супутникова система зв'язку. Недолік цієї системи полягає в тому, що в ній недостатньо описаний спосіб управління літальним апаратом за допомогою глобальної супутникової системи радіонавігації [3]. В основу корисної моделі поставлена задача створення способу ефективної системи наведення літального апарата (ЛА) на ціль, при якому використовують систему глобального позиціонування штучних супутників Землі і координати цілі задаються при пуску літального апарата (ЛА), при цьому проводиться порівняння з координатами поточного положення літального апарата в системі глобального позиціонування Землі. Як показано на фіг. 1 супутник Землі (СЗ) міняє положення в моменти часу t1, t2, t3, за якими слідкують станції спостереження (СС), які підключені до служби часу, сигнали із якої надходять на координатно-обчислювальний центр (КОЦ), яким управляє командний пункт (КП), при цьому в будь-який момент часу, наприклад t3, здійснюється постійний зв'язок між супутником Землі (СЗ) і літальним апаратом (ЛА). На фіг. 2а і 2б показані зони радіоспостереження. При цьому об'єм тетраедра буде максимальним, коли один із навігаційних супутників Землі знаходиться в зеніті, а другі розташовуються якомога ближче до горизонту, створюючи рівносторонній трикутник [3]. Під зоною радіоспостереження (PC) апаратури споживача (АП) розуміється частина колоземного космічного простору, який заключний між орбітою наземних штучних супутників Землі (НШСЗ) та площиною радіогоризонту (Г-Г') спостерігача СП, в межах якої можливий стійкий радіозв'язок між спостерігачем (СП) та супутником С (С'). Такий радіозв'язок забезпечується тільки при куті місця наземного штучного супутника Землі (НШСЗ), який перевищує межове значення 10. Тому фактично зона спостереження являє собою частину простору, обмеженого конусом з твірними СПС та СПС' [3]. За рахунок того, що ЛА здійснює польоти на визначеній висоті, зона радіоспостереження практично співпадає з лінією (Г-Г') конуса. Як показано на фіг. 2б [3] під зоною спостереження наземного штучного супутника Землі розуміють сукупність точок, із яких НШСЗ, який знаходиться на висоті Н над поверхнею Землі, спостерігається під кутом місця, який більше і відраховується між напрямками на НШСЗ та горизонтом. Ця зона однозначно визначається центральним кутом [3]: R cos arccos HR . (1) 40 45 50 Вважається [3], що з висоти польоту ЛА НШСЗ спостерігається при 0 . На фіг. 3 показана блок-схема алгоритму роботи системи. Як показано на фіг. 3 в блоці 1 координати цілі задаються при пуску літального апарата, система 2 глобального позиціонування [3] задає в блок 3 координати поточного положення літального апарата. В блоці 4 здійснюється порівняння вказаних координат. В блоці 5 визначаються сигнали неспівпадіння, які подаються в блок 6 системи управління літальним апаратом, в блоці 7 створюються відповідні управляючі сигнали, які по лінії зворотного зв'язку надходять в систему глобального позиціонування 2. Запропонований спосіб наведення літального апарата на ціль може знайти широкі можливості застосування в практичному використанні при дуже складних атмосферних умовах польоту літального апарата. Джерела інформації: 1. Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації. Патент України № 8150 МПК G01 S5/14 2005 р. 2. Супутникова система зв'язку. Патент України № 5974 МПКН04 137/00. 3. Бессонов А.А., Мамаев В.Я. Спутниковые навигационные системы. Санкт-Петербург, 2006 г. 55 1 UA 100759 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Спосіб наведення літального апарата (ЛА) на ціль, в якому використовують систему глобального позиціонування штучних супутників Землі, який відрізняється тим, що координати цілі задають при пуску літального апарата (ЛА) і проводять порівняння з координатами поточного положення літального апарата в системі глобального позиціонування штучних супутників Землі. 2 UA 100759 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: наведення, апарата, спосіб, ціль, літального
Код посилання
<a href="https://ua.patents.su/5-100759-sposib-navedennya-litalnogo-aparata-na-cil.html" target="_blank" rel="follow" title="База патентів України">Спосіб наведення літального апарата на ціль</a>
Спосіб визначення місцеположення літального апарата
Номер патенту: 49076
Опубліковано: 12.04.2010
Автори: Герасименко Володимир Вікторович, Блаженний Валерій Іванович, Слєпов Лев Іванович, Щипанський Павло Володимирович
МПК: G01S 5/10
Мітки: апарата, літального, визначення, спосіб, місцеположення
Формула / Реферат:
Спосіб визначення місцеположення літального апарата, при якому визначають місцеположення літального апарата за допомогою використання оглядового радіолокатора, який відрізняється тим, що додатково отримують інформацію про координати місцеположення літального апарата за допомогою двох і більше оглядових радіолокаторів та оцінюють за допомогою формули,і...
Пристрій для посадки літального апарата
Номер патенту: 34342
Опубліковано: 11.08.2008
Автори: Слєпов Лев Іванович, Гладков Віктор Михайлович, Якобінчук Олександр Вікторович, Куровська Тетяна Юріївна, Блаженний Валерій Іванович
МПК: B64F 1/00
Мітки: пристрій, посадки, літального, апарата
Формула / Реферат:
1. Пристрій для посадки літального апарата, який містить посадкову смугу, гальмівний пристрій, який відрізняється тим, що додатково містить транспортну платформу, що містить двигун, пристрій вимірювання координат і швидкості літального апарата, пристрій керування, приймач, при цьому посадкова смуга виконана як пристрій фіксації літального апарата, причому гальмівний пристрій розташовано на транспортній платформі.2. Пристрій для посадки...
Спосіб діагностики зовнішнього обводу літального апарата на основі температурного поля площини літального апарата в польоті
Номер патенту: 73709
Опубліковано: 10.10.2012
Автори: Казак Василь Миколайович, Бабенко Андрій Євгенійович, Казак Владислав Аурелійович
МПК: B64D 45/00, G01N 25/72
Мітки: діагностики, поля, основі, зовнішнього, апарата, польоті, обводу, спосіб, площині, літального, температурного
Формула / Реферат:
Спосіб діагностики зовнішнього обводу літального апарата на основі температурного поля площини літального апарата в польоті, за допомогою якого здійснюють у польоті моніторинг технічного стану зовнішнього обводу літального апарата у реальному часі; визначають момент часу, ступінь і місце виникнення пошкодження, який відрізняється тим, що для його реалізації застосовують теорію теплового поля, будують діагностичні матриці вагових коефіцієнтів...
Спосіб і система для виявлення ушкодження ротора двигуна літального апарата і двигун літального апарата
Номер патенту: 82462
Опубліковано: 25.04.2008
Автори: Еван Філіпп, Компера Патрік
МПК: G01M 1/22, G01H 1/00, F01D 21/00
Мітки: система, виявлення, спосіб, ротора, літального, апарата, ушкодження, двигун, двигуна
Формула / Реферат:
1. Спосіб виявлення ушкодження ротора двигуна літального апарата, який включає вимірювання вібрації і швидкості для збору даних, які характеризують швидкість обертання ротора, а також амплітуду і фазу його вібрації під час контрольованого польоту, який відрізняється тим, щозчитують зібрані дані,на основі зібраних даних обчислюють середній вектор вібрації в вибраному інтервалі швидкостей обертання ротора, причому амплітуда...
Спосіб випробування безпілотного літального апарата
Номер патенту: 74890
Опубліковано: 15.02.2006
Автори: Любарець Андрій Анатолійович, Коростельов Олег Петрович, Семенов Леонід Антонович, Яковенко Петро Олексійович, Доценко Борис Іванович, Шепелєв Юрій Іванович, Кузьмін В'ячеслав Павлович
МПК: F42B 15/01
Мітки: випробування, літального, безпілотного, спосіб, апарата
Формула / Реферат:
Спосіб випробування безпілотного літального апарата (ЛА), що включає задання координат цілі, визначення поточних координат ЛА, оцінку відносних поточних координат ЛА-ціль, пуск ЛА у фіксованій точці простору, керування ЛА, наприклад, за методом пропорційного зближення, який відрізняється тим, що поточні координати ЛА визначають за допомогою радіонавігаційної системи супутникової навігації, додатково визначають поточні значення проекцій...
Попередній патент: Спосіб визначення втомних змін експлуатаційних характеристик покриттів
Наступний патент: Гіроакселерометричний спосіб визначення параметрів кутової орієнтації
Випадковий патент: Спосіб електронно-променевого лиття