Спосіб випробування безпілотного літального апарата
Номер патенту: 74890
Опубліковано: 15.02.2006
Автори: Любарець Андрій Анатолійович, Кузьмін В'ячеслав Павлович, Яковенко Петро Олексійович, Семенов Леонід Антонович, Коростельов Олег Петрович, Доценко Борис Іванович, Шепелєв Юрій Іванович
Формула / Реферат
Спосіб випробування безпілотного літального апарата (ЛА), що включає задання координат цілі, визначення поточних координат ЛА, оцінку відносних поточних координат ЛА-ціль, пуск ЛА у фіксованій точці простору, керування ЛА, наприклад, за методом пропорційного зближення, який відрізняється тим, що поточні координати ЛА визначають за допомогою радіонавігаційної системи супутникової навігації, додатково визначають поточні значення проекцій кутової швидкості лінії візування цілі шляхом обробки поточних координат цілі і ЛА і виробляють керуючий сигнал, еквівалентний сигналу головки самонаведення, при цьому поточні координати ЛА і сигнали системи керування за допомогою телеметричної апаратури передають на станцію приймання і за ними визначають траєкторію польоту ЛА, його динамічні характеристики і якість функціонування його системи керування.
Текст
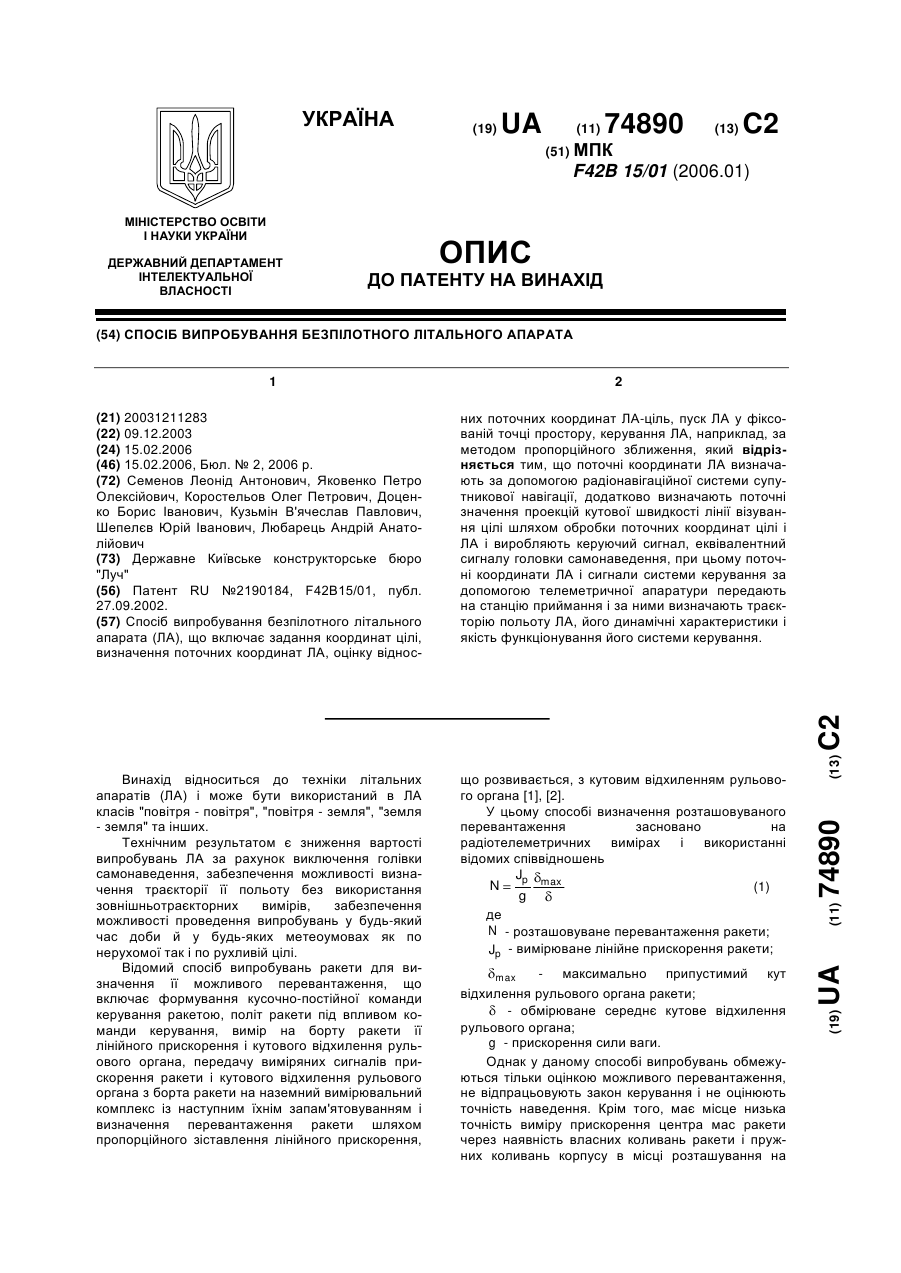
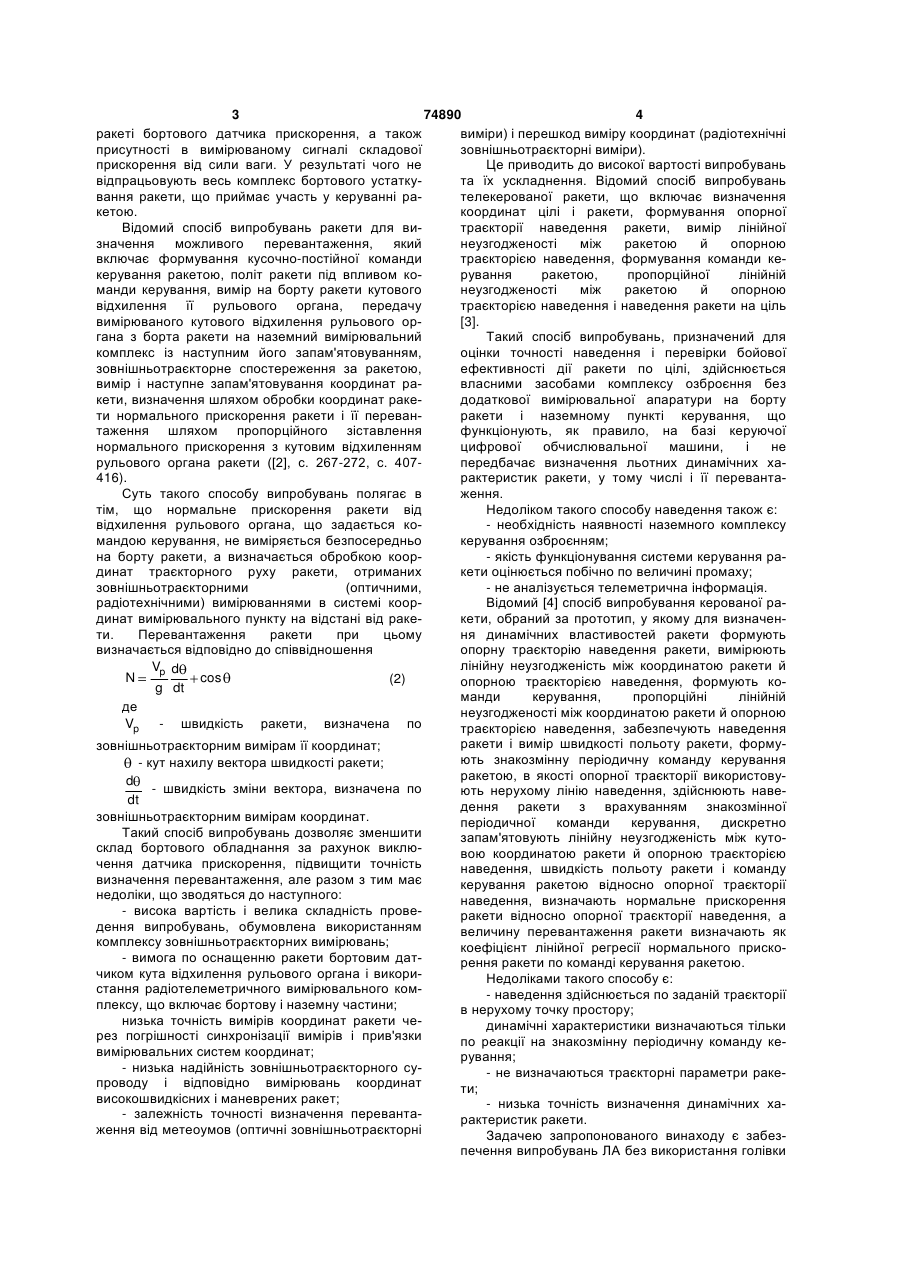
Спосіб випробування безпілотного літального апарата (ЛА), що включає задання координат цілі, визначення поточних координат ЛА, оцінку віднос 3 74890 4 ракеті бортового датчика прискорення, а також виміри) і перешкод виміру координат (радіотехнічні присутності в вимірюваному сигналі складової зовнішньотраєкторні виміри). прискорення від сили ваги. У результаті чого не Це приводить до високої вартості випробувань відпрацьовують весь комплекс бортового устаткута їх ускладнення. Відомий спосіб випробувань вання ракети, що приймає участь у керуванні рателекерованої ракети, що включає визначення кетою. координат цілі і ракети, формування опорної Відомий спосіб випробувань ракети для витраєкторії наведення ракети, вимір лінійної значення можливого перевантаження, який неузгодженості між ракетою й опорною включає формування кусочно-постійної команди траєкторією наведення, формування команди кекерування ракетою, політ ракети під впливом корування ракетою, пропорційної лінійній манди керування, вимір на борту ракети кутового неузгодженості між ракетою й опорною відхилення її рульового органа, передачу траєкторією наведення і наведення ракети на ціль вимірюваного кутового відхилення рульового ор[3]. гана з борта ракети на наземний вимірювальний Такий спосіб випробувань, призначений для комплекс із наступним його запам'ятовуванням, оцінки точності наведення і перевірки бойової зовнішньотраєкторне спостереження за ракетою, ефективності дії ракети по цілі, здійснюється вимір і наступне запам'ятовування координат равласними засобами комплексу озброєння без кети, визначення шляхом обробки координат ракедодаткової вимірювальної апаратури на борту ти нормального прискорення ракети і її переванракети і наземному пункті керування, що таження шляхом пропорційного зіставлення функціонують, як правило, на базі керуючої нормального прискорення з кутовим відхиленням цифрової обчислювальної машини, і не рульового органа ракети ([2], с. 267-272, с. 407передбачає визначення льотних динамічних ха416). рактеристик ракети, у тому числі і її перевантаСуть такого способу випробувань полягає в ження. тім, що нормальне прискорення ракети від Недоліком такого способу наведення також є: відхилення рульового органа, що задається ко- необхідність наявності наземного комплексу мандою керування, не виміряється безпосередньо керування озброєнням; на борту ракети, а визначається обробкою коор- якість функціонування системи керування радинат траєкторного руху ракети, отриманих кети оцінюється побічно по величині промаху; зовнішньотраєкторними (оптичними, - не аналізується телеметрична інформація. радіотехнічними) вимірюваннями в системі коорВідомий [4] спосіб випробування керованої радинат вимірювального пункту на відстані від ракекети, обраний за прототип, у якому для визначенти. Перевантаження ракети при цьому ня динамічних властивостей ракети формують визначається відповідно до співвідношення опорну траєкторію наведення ракети, вимірюють лінійну неузгодженість між координатою ракети й Vp d N cos (2) опорною траєкторією наведення, формують коg dt манди керування, пропорційні лінійній де неузгодженості між координатою ракети й опорною - швидкість ракети, визначена по Vp траєкторією наведення, забезпечують наведення ракети і вимір швидкості польоту ракети, формузовнішньотраєкторним вимірам її координат; ють знакозмінну періодичну команду керування - кут нахилу вектора швидкості ракети; ракетою, в якості опорної траєкторії використовуd - швидкість зміни вектора, визначена по ють нерухому лінію наведення, здійснюють навеdt дення ракети з врахуванням знакозмінної зовнішньотраєкторним вимірам координат. періодичної команди керування, дискретно Такий спосіб випробувань дозволяє зменшити запам'ятовують лінійну неузгодженість між кутосклад бортового обладнання за рахунок виклювою координатою ракети й опорною траєкторією чення датчика прискорення, підвищити точність наведення, швидкість польоту ракети і команду визначення перевантаження, але разом з тим має керування ракетою відносно опорної траєкторії недоліки, що зводяться до наступного: наведення, визначають нормальне прискорення - висока вартість і велика складність проверакети відносно опорної траєкторії наведення, а дення випробувань, обумовлена використанням величину перевантаження ракети визначають як комплексу зовнішньотраєкторних вимірювань; коефіцієнт лінійної регресії нормального приско- вимога по оснащенню ракети бортовим датрення ракети по команді керування ракетою. чиком кута відхилення рульового органа і викориНедоліками такого способу є: стання радіотелеметричного вимірювального ком- наведення здійснюється по заданій траєкторії плексу, що включає бортову і наземну частини; в нерухому точку простору; низька точність вимірів координат ракети чединамічні характеристики визначаються тільки рез погрішності синхронізації вимірів і прив'язки по реакції на знакозмінну періодичну команду кевимірювальних систем координат; рування; - низька надійність зовнішньотраєкторного су- не визначаються траєкторні параметри ракепроводу і відповідно вимірювань координат ти; високошвидкісних і маневрених ракет; - низька точність визначення динамічних ха- залежність точності визначення перевантарактеристик ракети. ження від метеоумов (оптичні зовнішньотраєкторні Задачею запропонованого винаходу є забезпечення випробувань ЛА без використання голівки 5 74890 6 самонаведення, підвищення точності визначення - кут крену ЛА, видаваний системою керудинамічних характеристик ЛА і параметрів його вання. траєкторії, забезпечення можливості проведення Для обчислення на борту ЛА значень сигналів випробувань у будь-який час доби й у будь-яких , 2 необхідні величини в , г (інформація про 1 метеоумовах. кут крену мається на борту ракети). Дані величини Поставлена ціль досягається тим, що в можна визначити за інформацією про параметри способі випробувань ракети, що включає задания відносного руху ЛА і цілі. координат цілі, визначення поточних координат На фіг. 1 показане відносне положення ракети ЛА, оцінку відносних поточних координат ЛА-ціль, і цілі в стартовій системі координат, де Dx , Dy , Dz пуск ЛА з носія у фіксованій точку простору, керування ЛА по методу пропорційного зближення, проекції вектора відносної дальності ЛА-ціль; поточні координати ЛА визначають за допомогою - кути візування цілі відповідно в г, в радіонавігаційної супутникової системи, оцінюють горизонтальній і вертикальній площинах. поточні значення проекцій кутової швидкості лінії На підставі фіг. 1 запишемо: візування шляхом обробки поточних координат ЛА Dy і цілі і виробляють керуючий сигнал, еквівалентний arctg , в сигналу, що видається голівкою самонаведення, Dx (4) при цьому поточні координати ЛА і сигнали систеD arctg z . ми керування за допомогою телеметричної апараг Dx тури передають на наземний пункт і по них визнаДиференціюючи вираз (4) за часом, чають траєкторію її польоту і якість одержуємо: відпрацьовування ракетою керуючих сигналів. VxDz VyD x В якості приймача сигналів супутникової , в навігації може бути використаний D2 D2 x y радіонавігаційний блок «GPS-ГЛОНАСС» [5]. У (5) VxDz VzD x процесі проведення випробувань ЛА з викори, г станням системи супутникової навігації вирішують D2 D 2 x z наступні задачі: де Vx , Vy Vz - проекції вектора відносної - відпрацьовують аеродинамічну схему ЛА; швидкості ЛА-ціль. - відпрацьовують систему стабілізації ракети Параметри відносного руху при старті і на траєкторії польоту; - оцінюють якість наведення як на нерухому, Dx , Dy , Dz , Vx , Vy , Vz . оцінюються за інформацією так і на рухому ціль; про абсолютні параметри руху ЛА, що визнача- відпрацьовують закон наведення; ються системою супутникової навігації, і парамет- використовують системи супутникової рах руху цілі, що задаються апріорно. Відповідно навігації в бортовий телеметричній апаратурі. до [5] запишемо: Застосування системи супутникової навігації D x R3 BР Bц дозволяє зменшити вартість випробувань ЛА за Dz R3 cos LР LР LЦ рахунок виключення дорогої голівки самонаведення і можливості застосування в будь-яких метеоD y HP HЦ умовах і будь-який час доби. При даному способу випробувань функція голівки самонаведення імітується контролером Vx VxP VxЦ (6) обробки навігаційної інформації (бортовим обчисVy VyP VyЦ лювачем) з використанням інформації про задані в часі параметри руху цілі і поточні параметри руху Vz VzP VzЦ ЛА, одержані від системи супутникової навігації. 1 e2 До таких параметрів відносяться координати ЛА і R3 3 цілі і проекції векторів їхніх швидкостей. 1 e2 sin2 BP 2 Функція голівки самонаведення полягає у де R 3 - радіус Землі на широті польоту ЛА; визначенні по відомому співвідношенню проекцій кутової швидкості лінії візування в зв'язаній з ЛА BР , LP , HP - географічні координати ракети, системі координат, що використовуються для кевидавані системою супутникової навігації; рування ЛА по методу пропорційного зближення ( BЦ , LЦ , HУ - географічні координати цілі, що [6], стор. 74-107): задаються апріорно; 1 в cos г sin , VxP , VyP , VzP - проекції вектора швидкості ЛА (3) sin 2 в г cos , видавані системою супутникової навігації; VxЦ, VyЦ, VzЦ - проекції вектора швидкості цілі, де - кутова швидкість лінії візування відповідно по першому і другому каналах керування; - кутова швидкість лінії візування в, г відповідно в стартовій земній системі координат; 1, 2 що задаються апріорно; 6378245м - велика піввісь референц еліпсоїда Землі; е 1 : 298.3 - полярний стиск. Таким чином, маючи інформацію про поточні параметри руху ЛА, по співвідношенням (4), (5), (6) 7 74890 8 за допомогою бортового обчислювача можна швидкості лінії візування і кутів візування, перевідтворити функцію голівки самонаведення, а сигтворення цифрових кодів в аналогові сигнали, аналогічні сигналам голівки самонаведення. нали 1, 2 використовувати для керування ЛА. Сформовані такий чином аналогові сигнали надСтруктурна схема пристрою для реалізації ходять на вхід системи керування 6, де способу випробувань з використанням системи реалізується принцип пропорційного наведення. супутникової навігації приведена на фіг.2. Вихідні сигнали системи керування 6 надходять на До складу пристрою входять: вхід блоку рульових приводів 7, відхилення рулів прийомна антена 1; приймач навігаційної яких приводить до зміни параметрів траєкторії інформації 2; контролер обробки навігаційної польоту ЛА, здійснюється керування рухом ЛА і інформації 3; апаратура бортова телеметрична 4; наведення її на ціль. Координати цілі і параметри джерело живлення 5; система керування 6; блок функціонування системи керування 6, у тому числі рульових приводів 7. і приводів 7, надходять на апаратуру бортову теПриймач навігаційної інформації 2 разом з анлеметричну 4 і передаються на землю, де теною 1 призначений для приймання й обробки здійснюється їхня обробка й аналіз. радіонавігаційних сигналів від супутників. КонтроРеалізований на основі способу, що лер обробки навігаційної інформації 3 (бортовий пропонується, пристрій забезпечує проведення обчислювач) призначений для формування випробувань самонавідного ЛА й одержання сигналів, еквівалентних сигналам голівки самонаінформації для аналізу його динамічних, ведення шляхом перерахування географічних коаеродинамічних і балістичних характеристик. ординат ракети - широти, довготи, висоти над Дане технічне рішення знаходиться на стадії рівнем моря і проекцій її вектора швидкості. Елекекспериментального відпрацювання. троживлення приймача 2 і контролери 3 Література: здійснюється від джерела живлення 5. 1. А. А. Лебедев, Л.С. Чернобровкин. ДинамиПристрій функціонує таким чином. Перед пуска полета. - М.: Машиностроение, 1973. ком ЛА в контролер обробки навігаційної 2. А.А. Дмитриевский, В.П. Казаковцев. Двиінформації (бортовий обчислювач) 3 вводиться жение ракет. - М.: Воениздат, 1968. інформація про параметри руху цілі. Навігаційна 3. А. А. Лебедев, В. А. Карабанов. Динамика інформація від супутників через приймальну антесистем управления беспилотными летательными ну 1 надходить на приймач навігаційної інформації аппаратами. - М.: Машиностроение, 1965. 2, де здійснюється її попередня обробка і 4. Способ испытания телеуправляемой ракевиділення географічних координат ракети. У ты. Патент России № 2190184 контролері обробки навігаційної інформації 3 5. Ю.А. Соловьев. Системы спутниковой навивідповідно до приведених алгоритмів здійснюється гации. Эко-Трендз, М., 2000г. перерахування географічних координат, визна6. Е.И. Кринецкий. Системы самонаведения. чення відносних дальностей і відносних швидкоМ.: Машиностроение. 1970 г. стей ЛА-ціль, розрахунок проекцій кутової Комп’ютерна верстка М. Клюкін Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for testing unmanned aircraft
Автори англійськоюSemenov Leonid Antonovych, Yakovenko Petro Oleksiiovych, Korosteliov Oleh Petrovych, Dotsenko Borys Ivanovych, Kuzmin Viacheslav Pavlovych, Shepelev Yurii Ivanovych
Назва патенту російськоюСпособ испытания беспилотного летательного аппарата
Автори російськоюСеменов Леонид Антонович, Яковенко Петр Алексеевич, Коростелев Олег Петрович, Доценко Борис Иванович, Кузьмин Вячеслав Павлович, Шепелев Юрий Иванович
МПК / Мітки
МПК: F42B 15/01
Мітки: безпілотного, випробування, апарата, спосіб, літального
Код посилання
<a href="https://ua.patents.su/4-74890-sposib-viprobuvannya-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб випробування безпілотного літального апарата</a>
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Величко Надія Вікторівна
МПК: G05D 1/03, B64C 13/00
Мітки: система, стабілізації, апарата, літального, безпілотного
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Антошик Вікторія Миколаївна, Бандура Іван Миколайович, Амелін Сергій Вікторович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, система, стабілізації, безпілотного, літального
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Спосіб подачі компонентів палива в камеру згоряння двигуна літального апарата
Номер патенту: 74847
Опубліковано: 15.02.2006
Автор: Єрмоленко Іван Миколайович
Мітки: камеру, палива, апарата, згоряння, спосіб, двигуна, літального, компонентів, подачі
Формула / Реферат:
Спосіб подачі компонентів палива в камеру згоряння двигуна літального апарата, що включає витіснення компонентів палива з паливних баків під дією газів, що подаються в паливні баки, який відрізняється тим, що гази подають у напрямку, тангенціальному до циліндричної бокової поверхні паливних баків.
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Войченко Оксана Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: вісесиметричного, апарата, швидкостей, літального, демпфірування, кутових, космічного, спосіб
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11855
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Снагіцький Сергій Володимирович
МПК: B64G 1/24
Мітки: вісесиметричного, літального, демпфірування, апарата, космічного, кутових, швидкостей, система
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...