Гіроакселерометричний спосіб визначення параметрів кутової орієнтації
Номер патенту: 100760
Опубліковано: 10.08.2015

Формула / Реферат
Гіроакселерометричний спосіб визначення параметрів кутової орієнтації, що включає вимірювання проекцій абсолютного лінійного прискорення з використанням акселерометрів та вимірювання проекцій вектора земної швидкості та складових коріолісового та відносного прискорення з використанням гіроскопічних датчиків кутових швидкостей, який відрізняється тим, що значення крену та тангажа обчислюють за інформацією акселерометрів, що має високочастотну похибку, потім обробляють за схемою компенсації.
Текст
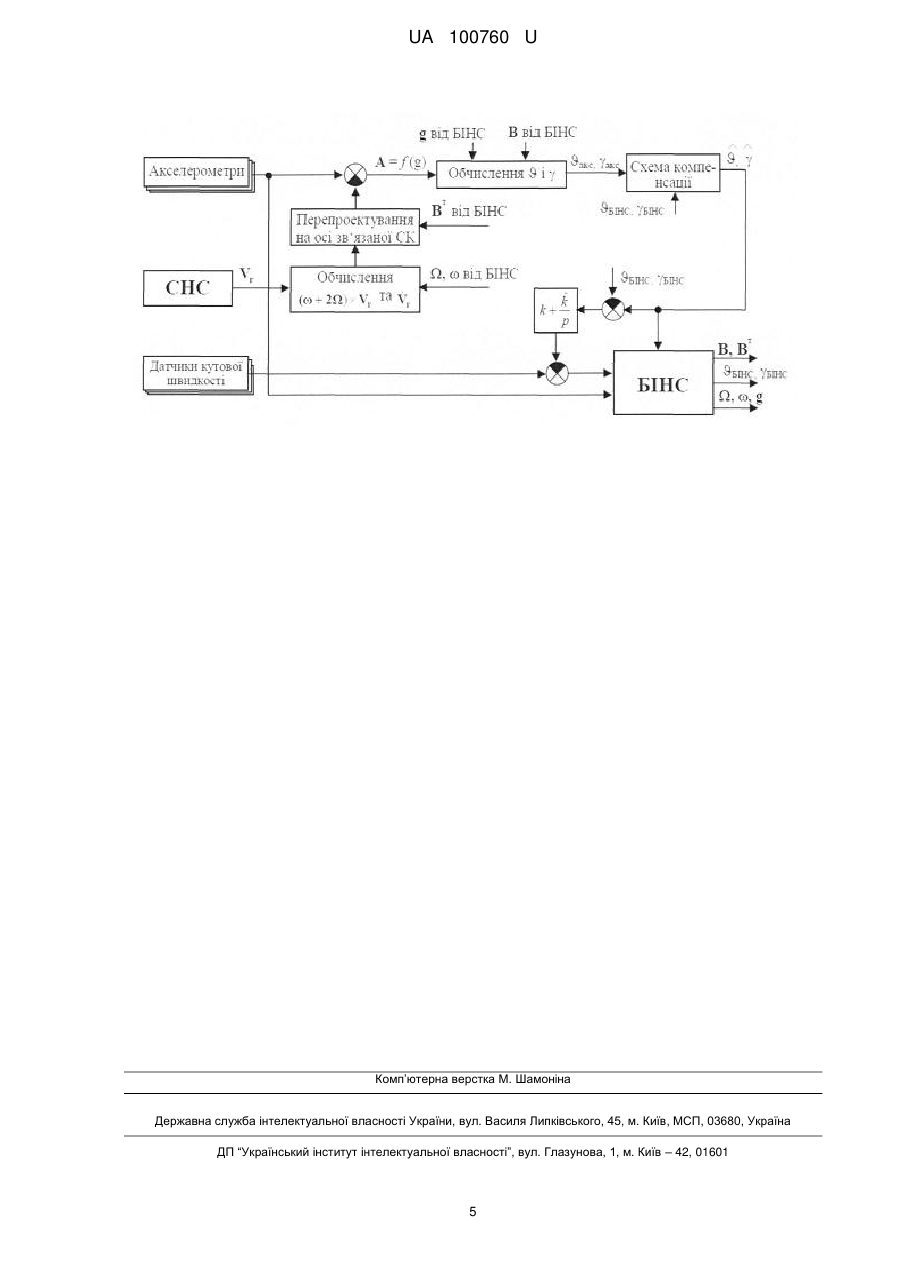
Реферат: Гіроакселерометричний спосіб визначення параметрів кутової орієнтації включає вимірювання проекцій абсолютного лінійного прискорення та вимірювання проекцій вектора земної швидкості, складових коріолісового та відносного прискорення. Значення крену та тангажа обчислюють за інформацією акселерометрів, що має високочастотну похибку, потім обробляють за схемою компенсації. UA 100760 U (54) ГІРОАКСЕЛЕРОМЕТРИЧНИЙ СПОСІБ ВИЗНАЧЕННЯ ПАРАМЕТРІВ КУТОВОЇ ОРІЄНТАЦІЇ UA 100760 U UA 100760 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі навігаційної техніки і може бути використаний при проектуванні інтегрованих інерціально-супутникових навігаційних систем (ІІСН) для різноманітних транспортних засобів, в тому числі і безпілотних авіаційних систем (БАС). Відомий спосіб визначення параметрів кутової орієнтації за [1], заснований на використанні сигналів блока акселерометрів і гіроскопічних датчиків кутових швидкостей і полягає в наступному. Проводять розрахунок матриці направляючих косинусів між зв'язаною і навігаційною системами координат, компенсують похибки акселерометрів за рахунок обліку обертання зв'язаної системи, здійснюють перерахунок показань акселерометрів із зв'язаної в навігаційну систему координат і їх інтегрування для розрахунку поточних швидкостей і прирощення координат. При цьому враховуються різні режими руху об'єкта, які характеризуються параметрами крену, похідною курсу та прискоренням в площині горизонту. Далі ці параметри використовують для обчислення коефіцієнтів підсилення систем, що реалізують індивідуальні закони управління паралельно до обчислюваних матриць направляючих косинусів між зв'язаною і навігаційною системами координат по одних і тих же показаннях акселерометрів і датчиків кутових швидкостей. Для кожної обчислювальної матриці направляючих косинусів визначають власні навігаційні параметри, що мають різний частотний характер помилок. Помилки обчислення кожної з матриць також мають різний частотний спектр залежно від режимів руху носія. Навігаційні параметри для кожної обчислювальної матриці направляючих косинусів подають на входи фільтра, що формує оптимальну комбінацію навігаційних рішень в залежності від частотного діапазону їх помилок, а також від параметрів руху. Недоліком пропонованого методу є необхідність враховувати різні режими руху. Відомий спосіб визначення параметрів кутової орієнтації [2] полягає в удосконаленні інерціально-супутникової системи з комбінованим використанням супутникових даних шляхом заміни дорогих високоточних інерціальних датчиків на більш "грубі" та дешеві, що базуються на MEMS-технології, а також введення додатково блока магнітометра та блока вимірювання висоти, що містить барометричний та ультразвуковий висотоміри. Його недоліком є використання значною мірою інформації супутникової навігаційної системи (СНС), що може бути недоступною в зоні радіомовчання, або коли сигнал супутника навмисно блокується. Відомий спосіб визначення навігаційних параметрів за [3] включає інерціальну систему орієнтації (ІСО) на "грубих" чутливих елементах, яка підключена до обчислювальної платформі і має розташовані по трьох ортогональних осях ІСО три акселерометри і три датчики кутових швидкостей. Обчислюють кути орієнтації шляхом розрахунку матриці направляючих косинусів між зв'язаною і навігаційною системами координат, виконують компенсацію похибок сигналів прискорень акселерометрів, виконують перерахунок прискорень із зв'язаної системи координат в навігаційну систему і визначають поточні швидкості і прирощення координат. Недолік полягає в тому, що помилки у визначенні орієнтації однозначно визначаються точністю датчиків кутових швидкостей (ДКШ) і акселерометрів, тоді як помилки у визначенні координат зростають з плином часу пропорційно швидкості дрейфу ДКШ. Тому через деякий час автономної роботи (це залежить від точності чутливих елементів) обчислена на борту навігаційна система буде відрізнятися від істинної навігаційної системи на великі кути, що фактично веде до непрацездатності способу навігації. Обмеженість цього традиційного методу полягає в тому, що помилки інерціальної системи невіддільні від корисного сигналу (тобто істинних навігаційних параметрів). Цей висновок ґрунтується на тому факті, що помилки інерціальної системи мають низькочастотний характер, так звані шулерівські коливання, які невіддільні від реальних рухів носія, на якому встановлена система. Задачеюкорисної моделі є збільшення точності визначення навігаційних параметрів шляхом корекції параметрів кутової орієнтації шляхом компенсації похибок, які з'являються за рахунок дрейфу гіроскопічних датчиків кутової швидкості. Поставлена задача вирішують тим, що гіроакселерометричний спосіб визначення параметрів кутової орієнтації включає вимірювання проекцій абсолютного лінійного прискорення з використанням акселерометрів вимірювання проекцій вектора земної швидкості та складових коріолісового та відносного прискорення, з використанням гіроскопічних датчиків кутових швидкостей, згідно з корисною моделлю, значення крену та тангажа обчислюють за інформацією акселерометрів, що має високочастотну похибку, потім обробляють за схемою компенсації. Якщо єдиною силою, що діє на об'єкт, є сила земного тяжіння, то акселерометр, вимірюючи проекцію вектора гравітації на власну вісь чутливості Ax g sin , використовують як інклінометр для визначення статичного кута нахилу акселерометра. arcsinAx / g 1 UA 100760 U 5 На практиці на рухомий об'єкт, крім сили гравітації, діють ще й інші сили, викликані прискореннями, обертаннями, трясінням і т. д. Зокрема у польоті до прискорень, що характеризують зміну вектора відносної швидкості Vr , додають коріолісове прискорення 2 Vr , переносне прискорення та прискоренням сил земного тяжіння. Тоді прискорення A , що вимірюються акселерометром, має вигляд: A Vr з 2 Vr R g0 R . Зазвичай, переносне прискорення, обумовлене обертанням Землі R , векторне підсумовують з прискоренням сил земного тяжіння g0 R , утворюючи прискорення сили ваги 10 g g0 R R . Тоді рівняння уявних прискорень центра мас об'єкта, вимірюваних акселерометром, набувають вигляду A Vr з 2 Vr g . 15 20 (1) У вище наведених формулах Vr - вектор відносної швидкості ЛА; R - вектор, що характеризує поточне місце розташування об'єкта у вибраній системі координат (СК); кутова швидкість, яка виникає при обльоті сферичної поверхні Землі, яка, у свою чергу, обертається з кутовою швидкістю . В алгоритмах робочих режимів безплатформенної інерціальної навігаційної системи (БIHС) для того, щоб одержати значення вектора земної швидкості шляхом інтегрування сигналів акселерометрів, спроектованих на осі прямокутної географічної СК OLHB, необхідно з цих проекцій ( aL , aH , aB ) відняти складові проекцій коріолісового прискорення і складові проекцій прискорення сили ваги. Тоді проекції вектора земної швидкості на осі СК OLHB одержують, інтегруючи рівняння VL aL VB H VHB gL ; VH aH VL B VB aB VHL 25 VB L gH ; VL H gB . де складові проекцій B B V 2B , H H V 2H , L L V 2L VB H VHB , VL B VB L , VHL VL H - проекцій коріолісового прискорення; B V , H V , L V - проекції кутової швидкості обертання навігаційної СК OLHB, яка виникає 30 35 при обльоті сферичної поверхні Землі; B зcosB , H зsinB , L 0 - проекції кутової швидкості обертання Землі з на осі навігаційної СК OLHB; VB , VL , VH - проекції вектора швидкості на осі СК OLHB; gL , gB , gH - проекції прискорення сили ваги, які при малих -2 значеннях висоти ( H 100 км ), зберігаючи лише члени порядку малості 10 , розраховують за формулами: gL 0 , gB 0 , 40 45 2H gH g 1 5,2884 10 3 sin 2 B 1 1 e sin 2 B ; a - географічна широта; H - висота польоту; g - прискорення сили ваги на екваторі; a B велика піввісь земного еліпсоїда; e - ексцентриситет земного еліпсоїда. При застосуванні акселерометричного способу визначення параметрів кутової орієнтації застосовують аналогічний підхід. З показань акселерометрів (1) віднімають проекції складових відносного Vr з та коріолісового 2 Vr прискорень центра мас на осі зв'язаної СК, залишивши тільки складові прискорення сили ваги. A g . За величинами цих незбурених іншими силами проекцій прискорення сил ваги й визначають кути крену та тангажа за алгоритмами інклінометра. Складові коріолісового та відносного прискорення в ІССН розраховують або за оціненими з використанням методу компенсації навігаційними параметрами. Отримані параметри кутової орієнтації піддають додатковій обробці із застосуванням інформації від ДКШ, які входять до складу БІНС. 2 UA 100760 U 5 10 15 Структурна схема вимірника кутової орієнтації гіроакселерометричного (ВГА) представлена на кресленні. Тут за даними ІССН про складові вектора земної швидкості та складові коріолісовогота відносного прискорення розраховують їхні проекції на осі зв'язаної СК. Отримані складові віднімають від показань горизонтальних акселерометрів, а за інформацією про незбурені складові прискорення сили ваги, використовуючи матрицю напрямних косинусів та поточне значення прискорення сили ваги, які обчислюють за алгоритмами БIHС, розраховують поточні значення кутів крену та тангажа. Обчислені за інформацією акселерометрів значення крену та тангажа мають високочастотну похибку (шум датчика), тому цю інформацію піддають додатковій обробці з використанням схеми компенсації. При цьому комплексують покази БІНС, з низькочастотною змінною похибкою і показання ВГА з високочастотною сталою похибкою. Отримані оцінки використовують для корекції параметрів кутової орієнтації, які обчислюють за алгоритмами БIHС. Гіроакселерометичний спосіб вимірювання параметрів кутової орієнтації розглядають в алгоритмах роботи двокомпонентної БІНС, які описують тільки поздовжній рух БПЛА, що здійснює політ вздовж екватору. Кінематика обертового руху літака за кутом тангажа в алгоритмах роботи такої БІНС описують наступним чином: t z zдус L З ; 0 z dt , 0 20 а кінематику поступального руху центра мас - руху у вертикальній площині описують рівнянням: кор кор VH aH a H g ; VL aL aL ; L VL / R З , де З 7,27 10 51/ сек ; RЗ 6378388 м ; (2) aH a x sin a y cos ; aL a x cos a y sin ; кор кор aL VH L 2 З ; a H VL L 2 З . Вхідною інформацією для БШС є сигнали інерціальних датчиків z , a x , a y , які з д ус 25 урахуванням їх похибок ( z , a x , a y ), що містять детерміновані и білошумні складові, описують наступними рівняннями: zдус zман Li Зі z , g cos a sin a (3) кор кор a x a xман gi sini aHi sin i aLi sin i a x , a y a yман i i кор Hi sin i кор aLi i y (4) . (5) Тут враховують, що ДКШ, крім кутової швидкості z , яка характеризує маневр БАС, ман 30 вимірює також кутову швидкість обертання Землі Зі та кутову швидкість Li , обумовлену обльотом БАС сферичної Землі (індекс "і" свідчить, що це є істинні, а не розраховані значення). Аналогічно враховують, що акселерометри, крім прискорень a x , a y , які характеризують ман 35 40 ман маневр, вимірюють складові коріолисового прискорення, а також складові прискорення сили ваги. Для реалізації гіроакселерометричного методу вимірювання кута тангажа з показань поздовжнього акселерометра a x віднімають розраховані складові коріолісового прискорення ( aкор sin - aкор cos ), a також розраховані поздовжні прискорення центру мас БАС a x , що H L ман викликані керуючими впливами. Тоді сигнал поздовжнього акселерометра, що залишився, містить тільки проекцію вектора гравітації на власну вісь чутливості, а також детерміновану й білошумну складової помилки цього датчика Ax g sin ax . Складові коріолісового прискорення обчислюють за формулами (2), використовуючи оцінену інформацію про складові вектора земної швидкості ( VH , VL ) й швидкості зміни довготи L , а 3 UA 100760 U також відому величину кутової швидкості обертання Землі з . Для перепроектування цих складових на осі зв'язаної СК використовують скоректоване (гіроакселерометричне) значення кута тангажа . Складову a x розраховують за формулою ман 5 кор aL aL a y sin кор кор g sin aH sin - aL cos . cos Тут складові коріолісового прискорення також обчислюють з використанням оціненої інформації й скоректованого значення кута тангажа. При проектуванні на поздовжню вісь зв'язаної СК горизонтальної складової прискорення центра мас БАС з неї віднімають складову нормального прискорення a y sin і відновлюють раніше виключену складову коріолісового a xман 10 прискорення a кор . Прискорення сили ваги на екваторі - g задають рівним 9,8 м/сек . L 15 Оцінене значення горизонтальної складової прискорення центра мас a L одержують шляхом комплексування інформації БІНС і диференційованого сигналу VL СНС. При диференціюванні зашумленого радіотехнічного сигналу СНС виконують звичайні для таких сигналів процедури фільтрації. За інформацією Ax розраховують поточне значення кута тангажа - акселерометричний кут тангажа акс arcsinAx / g . За різницею поточного значення кута тангажа, яке обчислюють за алгоритмами БІНС, і акселерометричного кута тангажа формують сигнал, що коректує показання ДКШ (списують детерміновану складову похибки датчика). 20 2 ~ K zкор K z z акс . p 25 30 (6) Результатом такої корекції є скоректований (гіроакселерометричний) кут тангажа . Аналогічно обчислюють значення скоректованого (гіроакселерометричного) кута крену. Джерела інформації: 1. Патент РФ № 2348903 Способ определения навигационных параметров бесплатформенной инерциальной навигационной системой, - 2009. 2. Патент України № 79932 Малогабаритна інерціально-супутникова інтегрована навігаційна система, - 2013. 3. Патент США № 5422817 Strapdown inertial navigation system using high order correction, 1995. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 Гіроакселерометричний спосіб визначення параметрів кутової орієнтації, що включає вимірювання проекцій абсолютного лінійного прискорення з використанням акселерометрів та вимірювання проекцій вектора земної швидкості та складових коріолісового та відносного прискорення з використанням гіроскопічних датчиків кутових швидкостей, який відрізняється тим, що значення крену та тангажа обчислюють за інформацією акселерометрів, що має високочастотну похибку, потім обробляють за схемою компенсації. 4 UA 100760 U Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 21/00, G01S 19/00, G01C 21/10
Мітки: визначення, спосіб, параметрів, гіроакселерометричний, орієнтації, кутової
Код посилання
<a href="https://ua.patents.su/7-100760-giroakselerometrichnijj-sposib-viznachennya-parametriv-kutovo-oriehntaci.html" target="_blank" rel="follow" title="База патентів України">Гіроакселерометричний спосіб визначення параметрів кутової орієнтації</a>
Спосіб визначення кутової орієнтації об’єкта
Номер патенту: 36404
Опубліковано: 16.04.2001
Автори: Збруцький Олександр Васильович, Маринич Юрій Михайлович, Нестеренко Олег Іванович
МПК: G01C 19/00
Мітки: орієнтації, спосіб, визначення, кутової, об'єкта
Текст:
...і перпендикулярні головній осі гіроскопа, по кутам відхилення об'єкта відносно головної осі гіроскопа визначають кути і тангажу об'єкта, згідно з винаходом вводиться те, що додатково вимірюють управляючі моменти гіроскопа та визначають кут курсу за формулою: (19) UA (11) 36404 (13) A де K – кут к урсу об'єкта; M y1, M y 2 – управляючі моменти гіроскопа. 36404 K = arctg M y1 M y2 взаємоортогональних площинах у напрямку до...
Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра
Номер патенту: 67704
Опубліковано: 12.03.2012
Автори: Мельникович Володимир Борисович, Горін Іван Ярославович, Коврижкін Ігор Олегович, Коврижкін Олег Георгійович, Лагута Андрій Геннадійович
МПК: G01C 21/08
Мітки: визначення, орієнтації, використанням, сигналів, навігації, апарата, спосіб, супутникової, літального, кутової, магнітометра
Формула / Реферат:
Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра, у якому вимірювання сигналів напруженості магнітного поля Землі здійснюють з використанням трьох магнітометрів, орієнтованих за трьома взаємно перпендикулярними осями зв'язаної з літальним апаратом системи координат, який відрізняється тим, що сигнал курсу
Прилад для визначення кутової орієнтації стебел луб’яних культур у стрічці
Номер патенту: 99022
Опубліковано: 12.05.2015
Автори: Коропченко Сергій Петрович, Петраченко Дмитро Олександрович, Маринченко Ігор Олексійович, Гілязетдінов Рубіль Нуртдінович
МПК: G01B 5/24
Мітки: прилад, орієнтації, луб'яних, стрічці, визначення, культур, стебел, кутової
Формула / Реферат:
Прилад для визначення кутової орієнтації стебел луб'яних культур у стрічці, що містить напрямну, вимірювальну головку, шкалу, лінійку й фіксатор, який відрізняється тим, що напрямна встановлена на дві опори.
Спосіб визначення орієнтації космічного апарата
Номер патенту: 104831
Опубліковано: 11.03.2014
Автори: Кузнєцов Юрій Олексійович, Плаксій Юрій Андрійович, Лабазов Олег Олександрович, Олійник Сергій Вікторович
МПК: B64G 1/24, G01C 21/24
Мітки: визначення, космічного, апарата, спосіб, орієнтації
Формула / Реферат:
Спосіб визначення тривісної орієнтації космічного апарата, який полягає в тому, що після погашення кутової швидкості апарата вимірюють приріст вектора кута повороту космічного апарата і за виміряними значеннями за такт розрахунку обчислюють половину приросту вектора кута повороту за такт, визначають кватерніон повороту за такт шляхом додавання до одиниці половини приросту вектора кута повороту, а потім визначають тривісну орієнтацію...
Спосіб визначення орієнтації осі свердловини

Номер патенту: 30032
Опубліковано: 15.11.2000
Автори: Карпачов Юрій Андрійович, Гусєв Олексій Володимирович, Рудик Юрій Микитович, Анупрієнко Генадій Єфремович
МПК: E21B 47/00, G01C 9/00, E21B 47/02
Мітки: визначення, спосіб, свердловини, орієнтації, осі
Формула / Реферат:
1. Спосіб визначення орієнтації осі свердловини, який містить операції вимірювання проекцій вектора сили тяжіння та проекцій вектора абсолютної кутової швидкості обертання Землі на ортогональні осі системи координат гіроскопічного інклінометра, розташованного в свердловині, який відрізняється тим, що на поверхні свердловини вибирають систему координат oxyz, де вісь oz спрямована по вертикалі Землі, а в площині yoz розташований вектор
Попередній патент: Спосіб наведення літального апарата на ціль
Наступний патент: Будова з флатерним пристроєм
Випадковий патент: Кожухотрубний теплообмінник