Спосіб визначення координат вимірювального перетворювача дефектоскопа при скануванні поверхонь об’єктів
Номер патенту: 100762
Опубліковано: 10.08.2015

Формула / Реферат
Спосіб визначення координат вимірювального перетворювача дефектоскопа при скануванні поверхонь об'єктів, який полягає в тому, що поточні координати перетворювача визначають за способом інерційної навігації, який відрізняється тим, що за допомогою оптичного матричного сенсора переміщення отримують значення поточних переміщень в системі координат, зв'язаній з площиною об'єкта, кути орієнтації перетворювача в просторі отримують за допомогою інерційних датчиків - акселерометра, гіроскопа та компаса, за допомогою мікропроцесорного пристрою визначають поточні координати вимірювального перетворювача дефектоскопа в системі координат, зв'язаній з об'єктом.
Текст
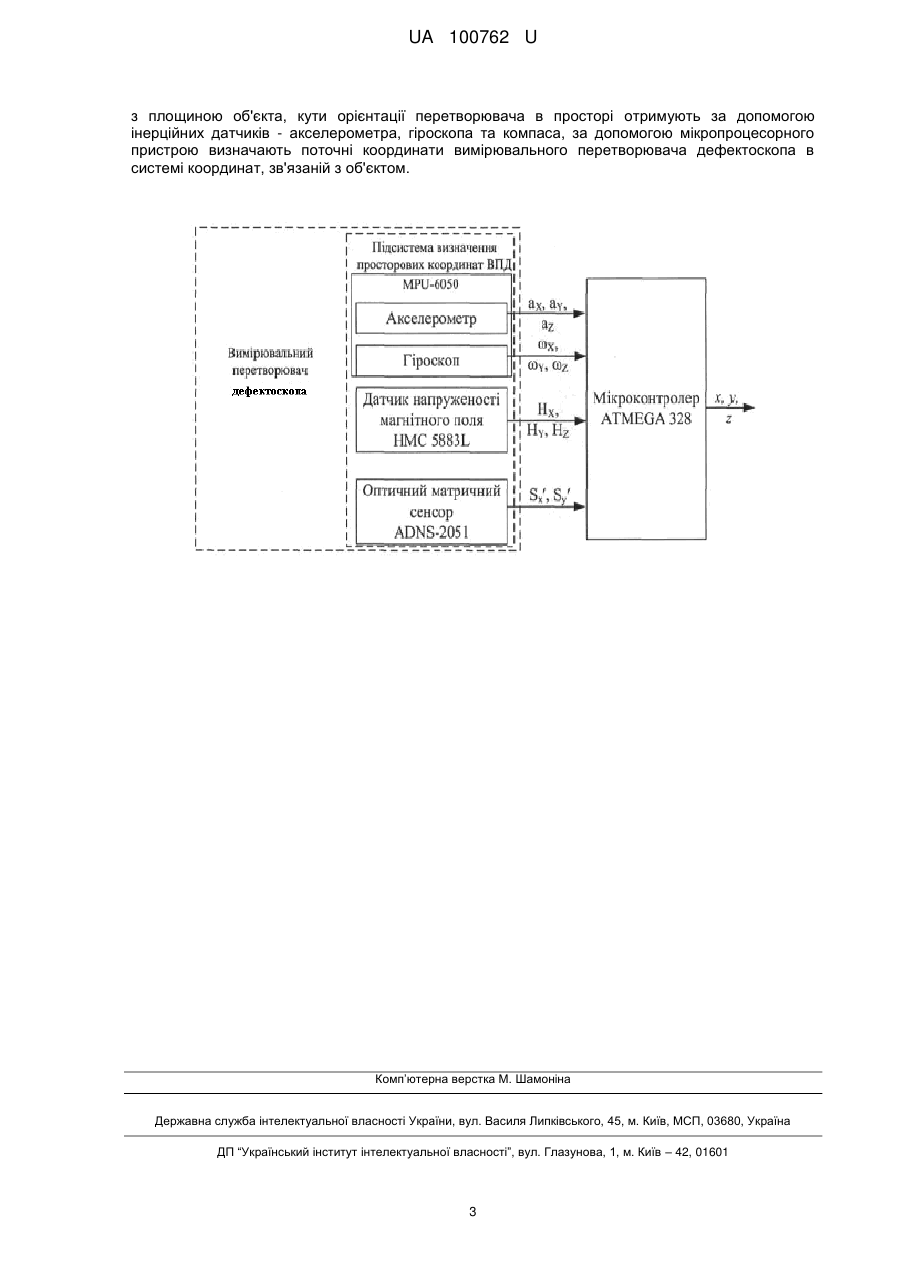
Реферат: UA 100762 U UA 100762 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до вимірювальної техніки і може застосовуватись в інформаційно-діагностичних системах для визначення координат вимірювального перетворювача при скануванні об'єктів складної форми, при автоматизованому неруйнівному контролі для визначення координат дефектів під час сканування об'єктів контролю. Відомі способи визначення координат вимірювального перетворювача дефектоскопа (ВПД) при ручному скануванні об'єктів в задачах неруйнівного контролю (НК) [1]. Їх умовно можна поділити на три групи: оптичні, механічні та радіохвильові. Способи першої групи полягають в оснащенні ВПД точковим джерелом світла, яке сприймається однією або декількома цифровими відеокамерами, розташованими у відповідний спосіб у визначених координатах в зоні проведення контролю (лабораторії), та визначенні координат точкового джерела світла за допомогою програмного аналізу зображень, отриманих з цих відеокамер. Такі способи мають суттєві обмеження на їх застосування за межами обладнаних лабораторій, а точність визначених координат залежить від умов освітлення. Способи другої групи полягають в механічному зв'язку датчика НК із основою в вибраній системі координат (наприклад, столом, на якому проводиться контроль) за допомогою поворотних механізмів із перетворювачами кут повороту - цифровий код. За отриманими кутами визначають координати положення датчика НК. Спосіб також не передбачає можливості проведення випробувань за межами обладнаної лабораторії. Способи третьої групи (методи тріангуляції) полягають у розміщенні навколо місця проведення контролю джерел радіосигналів, а на датчику НК - приймача радіосигналу і за часом запізнення прийнятих сигналів від різних джерел визначають координати приймача (або навпаки - на датчик НК монтується передавач, а навколо розміщують декілька приймачів). Такі способи складніші у застосуванні та мають недостатню роздільну здатність для їх широкого використання в координатних вимірюваннях для НК. Також відомий, вираний за прототип, спосіб визначення координат на основі інерційної навігаційної системи (ІНС) [1,2] який полягає в наступному: 1) використовуючи датчик напруженості магнітного поля Землі, визначають магнітний азимут ВПД (кут рискання); 2) використовуючи датчики прискорення, визначають проекції сумарного прискорення на осі, зв'язаної з об'єктом контролю (ОК); 3) вважаючи, що основною складовою визначеного сумарного прискорення є прискорення вільного падіння, визначають кути нахилу ВПД відносно горизонту (кути крену та тангажу); 4) використовуючи датчики кутових швидкостей, також визначають кути крену, тангажу та рискання; 5) коригують результати вимірювання кутів, використовуючи комплементарний фільтр або фільтр Калмана; 6) використовуючи скориговані кути крену та тангажу та проекції сумарного прискорення, визначають прискорення руху ВПД; 7) визначають швидкість ВПД та відстань, на яку переміщено ВПД шляхом інтегрування визначеного прискорення руху ВПД; 8) враховуючи отриману відстань та напрям руху, знаходять поточні координати ВПД. Недоліки вказаного способу полягають у наступному. По-перше, похибка визначення прискорення залежить від похибки визначення кутів нахилу об'єкта. По-друге, похибка визначення відстані суттєво збільшується за рахунок подвійного інтегрування прискорення. Наприклад, похибка визначення кута нахилу в 0,5° призведе до накопичення похибки визначення відстані до 5 м за 10 хвилин роботи такої навігаційної системи. Ці недоліки можуть бути зменшені шляхом калібрування датчиків, фільтрації їх показів та корекції показів інерційної навігаційної системи показами інших типів навігаційних систем (супутникової чи радіолокаційної). Проте, в задачах визначення координат під час сканування поверхонь ОК такі шляхи не можуть бути застосовані. В основу корисної моделі поставлена задача удосконалення способу визначення координат на основі ІНС шляхом використання нової технології визначення переміщення, що дозволить замінити процедуру подвійного інтегрування прискорення в ІНС та підвищити точність визначення координат ВПД в інформаційно-діагностичних системах при скануванні поверхонь ОК. Поставлена задача вирішується тим, що поточні координати перетворювача визначають за способом інерційної навігації, в якому згідно з корисною моделлю, за допомогою оптичного матричного сенсора переміщення отримують значення поточних переміщень в системі координат, зв'язанійз площиною об'єкта, кути орієнтації перетворювача в просторі отримують за допомогою інерційних датчиків - акселерометра, гіроскопа та компаса, за допомогою 1 UA 100762 U 5 10 15 мікропроцесорного пристрою визначають поточні координати вимірювального перетворювача дефектоскопа в системі координат, зв'язаній з об'єктом. Використання заявлених датчиків накладає певні обмеження на роботу з пристроєм що реалізує запропонований спосіб. А саме, виникає необхідність постійного контакту пристрою із поверхнею об'єкта контролю. Проте зменшується можливість накопичення похибки визначення переміщення, яка характерна для інерційних навігаційних систем. Використання ІНС модифікованої за запропонованим способом для визначення координат під час сканування об'єктів в НК дозволяє підвищити автономність та мобільність систем НК по відношенню до інших способів визначення координат. Заявлений спосіб реалізується таким чином. Використовуючи оптичний матричний сенсор, знаходять відносні переміщення Sx' та Sy' на поверхні ОК. Поверхня ОК розглядається як площина з декартовими координатами X' та Y'. За допомогою інерційних датчиків навігаційної системи (акселерометрів, гіроскопів, датчика напруженості магнітного поля) за відомими алгоритмами ІНС знаходять кути нахилу плати датчиків , , в глобальній системі координат (відносно горизонту та напрямку на північ). Враховуючи отримані поточні мікропереміщення ВПД по поверхні ОК, знаходять вектор переміщення в системі координат, зв'язаній з поверхнею ОК S' S'x ,S'y ,S'z . Використовуючи 20 25 30 35 40 45 кути нахилу , , , знаходять вектор переміщення в глобальній системі координат шляхом повороту вектора S ' на кути нахилу: S S' M,, ,Sx S'x MX ,Sy S'y MY ,Sz S'z MZ , , де M - відповідні матриці поворотів навколо осей X , Y та Z системи координат. 0 0 1 cos 0 sin cos sin 0 M X 0 cos sin , M Y 0 1 0 , MZ sin cos 0 . 0 sin cos sin 0 cos 0 0 1 Поточні значення координат знаходять шляхом інтегрування отриманого значення переміщення по відповідних осях: х=х0+SX; у=у0+SY; z=z0+SZ. Знаходження переміщення за допомогою запропонованої технології забезпечує зменшення накопичення похибки визначення координат в системах інерційної навігації при скануванні поверхонь об'єктів за рахунок відсутності подвійного інтегрування аналітично визначеного прискорення. Приклад. Реалізацію запропонованого способу втілено в експериментальному модулі визначення координат для систем НК, структурну схему апаратної частини якого показано на кресленні. Як інерційні датчики використано інтегральний інерційний датчик MPU-6050, який складається з трьохосьового акселерометра, трьохосьового гіроскопа, 12-бітного АЦП та мікропроцесорного модуля для керування датчиком. Функцію компаса виконує цифровий датчик напруженості магнітного поля HMC5883L. Оптичний матричний сенсор ADNS-2051 використовується в комбінації з сумісною оптичною лінзою HDNS-2100 та модулем світлодіодного підсвічування HDNS-2020. Всі елементи побудовані в інтегральному виконанні, що несуттєво впливає на масогабаритні характеристики перетворювачів НК. Експериментальним шляхом було отримано граничну похибку визначення координат по всіх осях, що не перевищувала 3,5 мм на плоскій поверхні розміром 300×400 мм, що підтверджує досягнення технічного результату при здійсненні заявленого способу. Джерела інформації: 1) Маєвський С.М. Координатна реєстрація в дефектоскопії /С.М. Маєвський, К.М. Серий. Львів: ФМІ ім. Г.В. Карпенка НАН України, 2011. – 116 с. 2) Пат. 2193754 Российская Федерация, МПК7 G01C 21/10. Инерциальная навигационная система [Текст] /Берман З.М., Вайсгант И.Б., Канушин В.М., Короленко А.В., Тупысев В.А., Шарыгин Б.Л.; заявитель и патентообладатель Федеральное государственное унитарное предприятие "Центральный научно-исследовательский институт "Электроприбор". - № 2001117539/28; заявл. 19.06.2001; опубл. 27.11.2002, Бюл. № 33 - 4 с. 50 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 Спосіб визначення координат вимірювального перетворювача дефектоскопа при скануванні поверхонь об'єктів, який полягає в тому, що поточні координати перетворювача визначають за способом інерційної навігації, який відрізняється тим, що за допомогою оптичного матричного сенсора переміщення отримують значення поточних переміщень в системі координат, зв'язаній 2 UA 100762 U з площиною об'єкта, кути орієнтації перетворювача в просторі отримують за допомогою інерційних датчиків - акселерометра, гіроскопа та компаса, за допомогою мікропроцесорного пристрою визначають поточні координати вимірювального перетворювача дефектоскопа в системі координат, зв'язаній з об'єктом. Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01B 7/004
Мітки: скануванні, перетворювача, поверхонь, координат, вимірювального, спосіб, визначення, об'єктів, дефектоскопа
Код посилання
<a href="https://ua.patents.su/5-100762-sposib-viznachennya-koordinat-vimiryuvalnogo-peretvoryuvacha-defektoskopa-pri-skanuvanni-poverkhon-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення координат вимірювального перетворювача дефектоскопа при скануванні поверхонь об’єктів</a>
Спосіб визначення координат спостережуваного об’єкту
Номер патенту: 98725
Опубліковано: 12.05.2015
Автори: Харченко Володимир Петрович, Кондратюк Василь Михайлович, Ковалевський Едуард Олександрович
МПК: G01C 21/00, H01Q 1/00
Мітки: координат, спосіб, об'єкту, визначення, спостережуваного
Формула / Реферат:
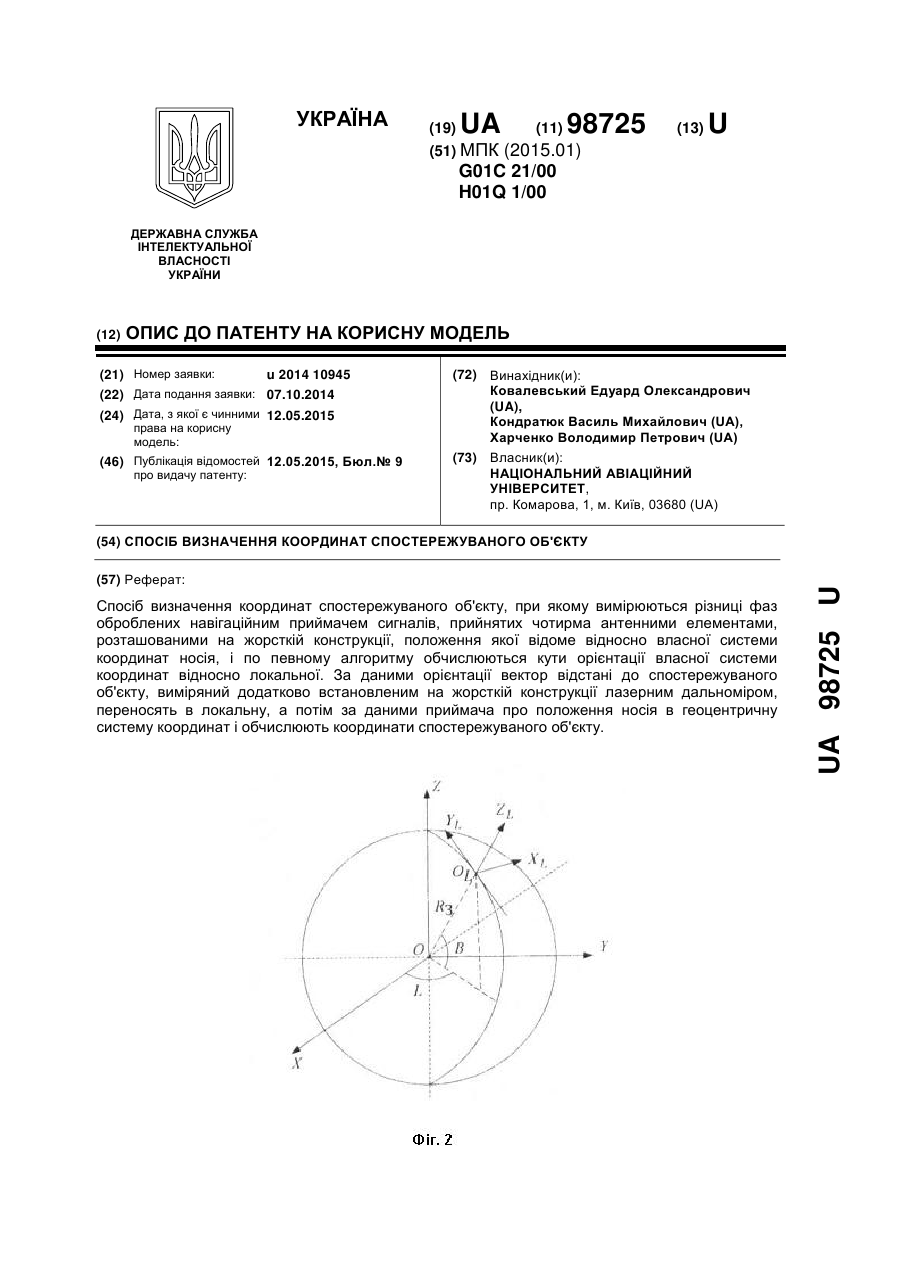
Спосіб визначення координат спостережуваного об'єкту, при якому вимірюються різниці фаз оброблених навігаційним приймачем сигналів, прийнятих чотирма антенними елементами, розташованими на жорсткій конструкції, положення якої відоме відносно власної системи координат носія, і по певному алгоритму обчислюються кути орієнтації власної системи координат відносно локальної, який відрізняється тим, що за даними орієнтації вектор відстані до...
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Карпов Анатолій Стєпановіч, Борісов Андрєй Владіміровіч, Ковалєвскій Міхаіл Марковіч, Іванов Робєрт Константіновіч, Рачук Владімір Сєргєєвіч, Монахов Юрій Владіміровіч
МПК: G01S 5/04, G01S 5/00, G01S 5/02
Мітки: координат, положення, відносної, інерціальної, системі, визначення, варіанти, спосіб, об'єкта, осей, навігаційної, базової
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Спосіб визначення координат сплеску на водній поверхні
Номер патенту: 104562
Опубліковано: 10.02.2014
Автори: Янкелевич Григорій Євсійович, Чепков Роман Ігорович, Дерепа Анатолій Войткович
МПК: G01C 11/00, G01S 5/00, G01C 13/00
Мітки: поверхні, координат, спосіб, сплеску, визначення, водний
Формула / Реферат:
Спосіб визначення координат сплеску на водяній поверхні, за яким розташовують буї навколо очікуваного місця сплеску, кріплячи їх за дно, диференційним методом супутникових вимірів визначають координати даних буїв, роблять фотознімок сплеску на водяній поверхні за допомогою знімальної фотокамери, що встановлена на літальному апараті та визначають координати сплеску, який відрізняється тим, що буї розташовують навколо очікуваного місця сплеску...
Спосіб визначення координат точок поверхні манекена
Номер патенту: 63491
Опубліковано: 15.01.2004
Автори: Михайловський Юрій Броніславович, Мица Вікторія Василівна, Славінська Алла Людвігівна
МПК: A41H 1/00
Мітки: манекена, спосіб, визначення, поверхні, координат, точок
Формула / Реферат:
Спосіб визначення координат точок поверхні манекена, який здійснюється за допомогою градуйованої платформи з манекеном, що обертається, приводів для обертання манекена та переміщення вертикального стержня, механізму фіксування координат точок, який відрізняється тим, що координати точок поверхні манекена - кут повороту манекена, величина переміщення вертикального стержня з механізмом ролика, відстань від поверхні манекена до осі обертання...
Спосіб визначення координат центра мас колісного транспортного засобу

Номер патенту: 42366
Опубліковано: 25.06.2009
Автори: Калінін Олександр Марковійович, Козлинський Мирослав Петрович, Андрієнко Анатолій Михайлович, Сорва Олександр Андрійович, Луньков Артур Володимирович
МПК: B60C 23/00
Мітки: спосіб, визначення, центра, колісного, координат, транспортного, мас, засобу
Формула / Реферат:
Спосіб визначення координат центра мас колісного транспортного засобу, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим та визначення величини вертикальних навантажень на кожне із коліс при прямолінійному нерівномірному русі, за якими визначають положення центра мас у вертикальній площині, який відрізняється тим, що додатково змінюють рух на прямолінійний рівномірний, визначають зміну тиску повітря в...
Попередній патент: Будова з флатерним пристроєм
Наступний патент: Пристрій для визначення зон можливого обледеніння літаків і гелікоптерів
Випадковий патент: Прилад для вимірювання водовіддачі промивальних рідин