Пристрій для визначення зон можливого обледеніння літаків і гелікоптерів
Номер патенту: 100763
Опубліковано: 10.08.2015
Автори: Пітерцев Олександр Андрійович, Яновський Фелікс Йосипович
Формула / Реферат
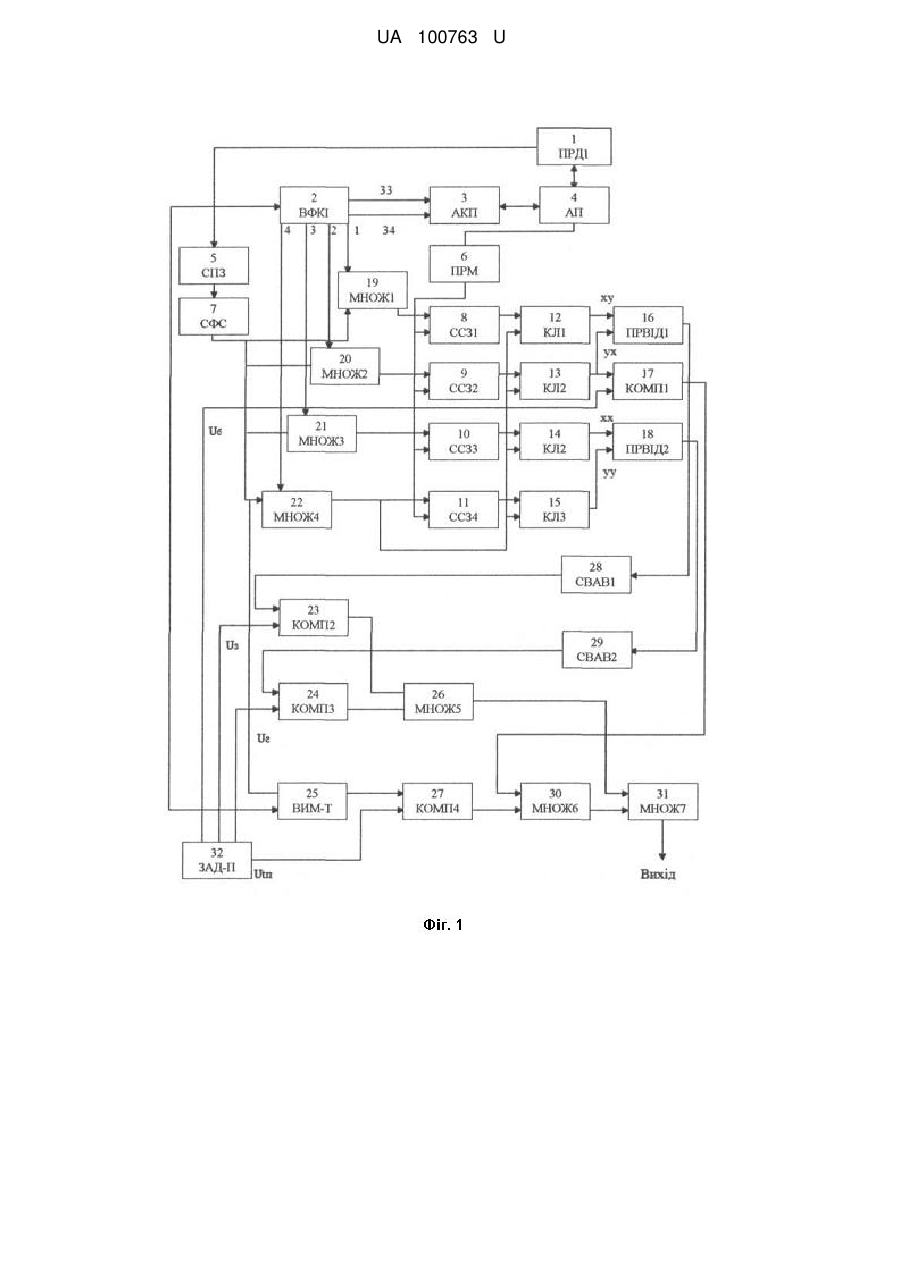
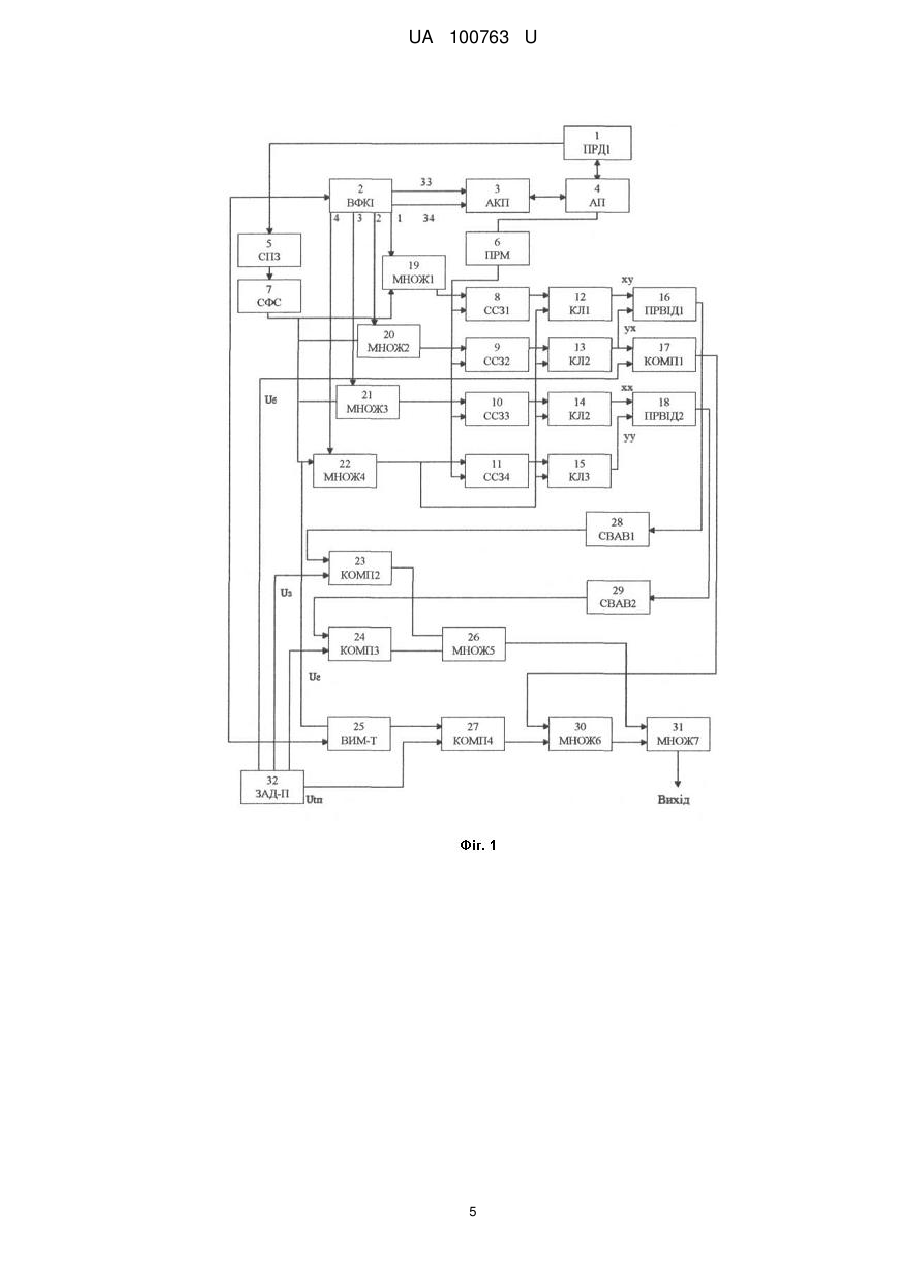
Пристрій для визначення зон можливого обледеніння літаків і гелікоптерів, який складається із блока 1 - передавача (ПРД1), блока 3 - антени, блока 4 - антенного перемикача (АП), блока 6 - приймача (ПРМ), який відрізняється тим, що до схеми введено наступні елементи: блок 2 - вузол формування керуючих імпульсів (ВФКІ), блок 3 - антена з керованою поляризацією (АКП), введено блок 4 - антенний перемикач (АП), блок 5 - схема перемінної затримки (СПЗ), блок 7 - схема формування строба (СФС), блоки 8, 9, 10 та 11 - відповідно перша, друга, третя й четверта схеми спостереження-зберігання (ССЗ), блоки 12, 13, 14 та 15 - відповідно перший, другий, третій та четвертий аналогові ключі (КЛ), блок 16 - перший пристрій віднімання (ПРВІД), блок 17 - перший аналоговий компаратор (КОМП), блок 18 - другий пристрій віднімання, блоки 19, 20, 21 і 22 - відповідно перша, друга, третя та четверта схеми логічного множення (схеми логічного І), блоки 23 і 24 - другий і третій аналогові компаратори, блок 25 - вимірювач температури метеорологічного об'єкта (ВИМ-Т), блок 26 - п'ята схема логічного множення (І), блок 27 - четвертий аналоговий компаратор, блоки 28 і 29 - перша і друга схеми виділення абсолютної величини сигналу (СВАВ), блоки 30 і 31 - шоста і сьома схеми логічного множення (І), блок 32 - задавач порогів (ЗАД-П).
Текст
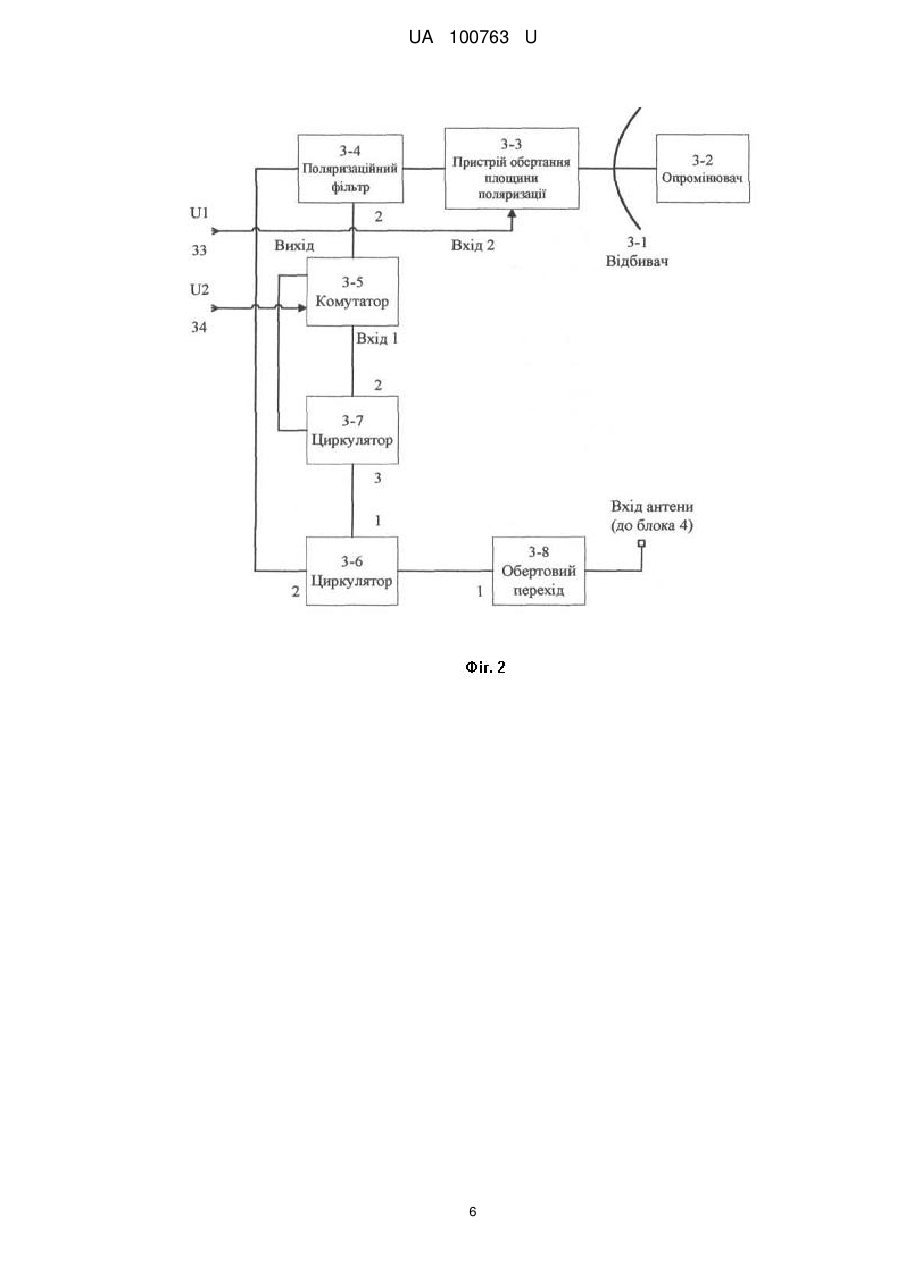
Реферат: UA 100763 U UA 100763 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до радіотехнічної галузі, а саме до метеорологічної радіолокації, і може бути використана для дистанційного безконтактного визначення зон можливого обледеніння літальних апаратів за допомогою бортового метеорологічного радіолокатора. Відомі пристрої для попередження екіпажу повітряного судна (ПС) про загрозу обледеніння ПС за допомогою радіоізотопних сигналізаторів обледеніння, наприклад, РІО-3, датчики яких встановлюють у повітрозбірниках двигунів АІ-25 [1]. У датчиках можуть використовуватись також інші фізичні принципи детектування наявності шару льоду на поверхні ПС. Зокрема відомі тепломірні, вібраційні, оптичні, акустичні та конденсаторні сигналізатори обледеніння. Однак відомим пристроям властиві недоліки, що полягають у низькій надійності і несвоєчасності подачі сигналів про загрозу обледеніння для інформування екіпажа і вмикання протиобледенілої системи і виникаючі у зв'язку з тим, що відомий пристрій принципово працездатний тільки тоді, коли ПС вже потрапило у зону можливого обледеніння (ЗМО) і процес обледеніння почався. Через зазначені недоліки автоматичний режим роботи протиобледенілої системи на практиці часто не використовують, а вмикання протиобледенілої системи в режим обігріву виконують в умовах можливого обледеніння, яке прогнозується за повідомленнями рейсових екіпажів і прогнозами синоптиків [1]. Найбільш близьким до пропонованого пристрою по своїй технічній суті є бортовий метеонавігаційний радіолокатор, що працює у режимі виявлення гідрометеоутворень. Цей режим полягає у формуванні голчастої діаграми спрямованості антени, випромінюванні імпульсів електромагнітних коливань (звичайно з вертикальною поляризацією), прийому відбитих сигналів (тієї ж поляризації), детектуванні обвідної сигналів, посиленні їх і яскравішим відображенні на екрані пристрою відображення метеонавігаційного радіолокатора з радіальносекторною (радіально-коловою) системою координат. При скануванні антеною відбитий від гідрометеоутворення сигнал створює на екрані характерні засвічування, що вирізняються оператором або пілотом. Оскільки ЗМО пов'язані з наявністю хмарності, то місце розташування можливих зон обледеніння ототожнюють із місцем розташування хмар, що виявляються у відомому способі [2]. Однак і цей пристрій для виявлення ЗМО має недолік, який полягає в тому, що практично всі хмари, що виявляються у відомому способі, можна вважати ЗМО, у той час як відомо, що обледеніння ПС відбувається тільки при наявності переохолоджених водяних крапель [3]. Зазначений недолік приводить до невиправдано високого рівня фіктивних тривог при локалізації ЗМО за допомогою відомого пристрою, що знижує регулярність польотів і тягне погіршення економічних показників повітряного транспорту. В основу корисної моделі поставлена задача підвищення достовірності виявлення ЗМО радіолокаційними засобами. Для цього потрібно забезпечити можливість відрізняти зони, що мають небезпеку для повітряних суден з точки зору можливості обледеніння, а саме: - містять дрібні водяні краплі у достатній кількості; - мають температуру повітря нижче 0 °C, від інших гідрометеорологічних утворень, які не мають ознак зони можливого обледеніння повітряного судна, таких, наприклад, як дощова хмара або хмара, що складається з кристалів льоду та снігу. Пристрій для визначення зон можливого обледеніння літаків і гелікоптерів, який складається із блока 1 - передавача (ПРД1), блока 3 - антени, блока 4 - антенного перемикача (АП), блока 6 приймача (ПРМ). Згідно з корисною моделлю, до схеми введено наступні елементи для забезпечення можливості вимірювання поляризаційних складових відбитого від цілі сигналу: блок 2 - вузол формування керуючих імпульсів (ВФКІ), блок 3 - антена з керованою поляризацією (АКП), введено блок 4 - антенний перемикач (АП), блок 5 - схема перемінної затримки (СПЗ), блок 7 - схема формування строба (СФС), блоки 8, 9, 10 та 11 - відповідно перша, друга, третя й четверта схеми спостереження - зберігання (ССЗ), блоки 12, 13, 14 та 15 відповідно перший, другий, третій та четвертий аналогові ключі (КЛ), блок 16 - перший пристрій віднімання (ПРВІД), блок 17 - перший аналоговий компаратор (КОМП), блок 18 - другий пристрій віднімання, блоки 19, 20, 21 і 22 - відповідно перша, друга, третя та четверта схеми логічного множення (схеми логічного "І"), блоки 23 і 24 - другий і третій аналогові компаратори, блок 25 вимірювач температури метеорологічного об'єкта (ВИМ-Т), блок 26 - п'ята схема логічного множення ("І"), блок 27 - четвертий аналоговий компаратор, блоки 28 і 29 - перша і друга схеми виділення абсолютної величини сигналу (СВАВ), блоки 30 і 31 - шоста і сьома схеми логічного множення ("І"), блок 32 - задавач порогів (ЗАД-П). Шини живлення блоків, кола, що встановлюють режими блоків по постійному струму, колу частотної корекції, фільтрації живлячих напруг, ланцюги, що задають часові відліки, входи блоків, постійно підключені до ланцюгів логічного нуля або логічної одиниці на Фіг. 1 не показані, як такі, що не мають 1 UA 100763 U 5 10 15 20 25 30 35 принципового значення для суті запропонованого технічного рішення (не є функціонально суттєвими ознаками). Завдяки цим блокам, пристрій для визначення зон можливого обледеніння літаків і гелікоптерів під час випромінювання імпульсів електромагнітних коливань і прийому відбитих сигналів від гідрометеорологічних утворень, додатково по черзі випромінює горизонтально (X) поляризовані й вертикально (Y) поляризовані зондувальні імпульси, приймає горизонтально (X) поляризовану й вертикально (Y) поляризовану компоненти відбитого сигналу по кожному випроміненому імпульсу, вимірює потужності основних (Рхх і Руу) і ортогональних (Рху і Рух) компонентів відбитого сигналу, вимірює температуру гідрометеорологічного утворення, від якого відбиваються зондувальні імпульси, порівнює між собою величини потужностей основних компонент відбитого сигналу Рхх і Руу, величини ортогональних компонент Рху і Рух відбитого сигналу, і за результатами цього порівняння і виміряного показника середньої температури метеорологічного утворення приймає рішення щодо наявності або відсутності ЗМО в обсязі простору, який задається напрямком випромінювання, часом запізнювання відбитих сигналів відносно випромінених імпульсів і тривалістю зондувальних імпульсів. При цьому, якщо температура менше або дорівнює температурі замерзання води і одночасно виконуються умови: Рхх = Руу Рху = Рух=0, де Рхх - потужність прийнятої горизонтально поляризованої компоненти відбитого сигналу при випромінюванні горизонтально поляризованих імпульсів, у децибелах; Руу - потужність прийнятої вертикально поляризованої компоненти відбитого сигналу при випромінюванні вертикально поляризованих імпульсів, у децибелах; Рxy - потужність прийнятої вертикально поляризованої компоненти відбитого сигналу при випромінюванні горизонтально поляризованих імпульсів, у децибелах; Рух - потужність прийнятої горизонтально поляризованої компоненти при випромінюванні вертикально поляризованих імпульсів, у децибелах, то пристрій для визначення зон можливого обледеніння літаків і гелікоптерів ухвалює рішення щодо наявності ЗМО, а в протилежному випадку - про відсутність ЗМО. Пристрій для локалізації ЗМО працює в такий спосіб. Передавач (1) виробляє зондувальний радіоімпульс СВЧ діапазону (наприклад, 3,2 см), який через антенний перемикач (4) надходить на вхід приймально-передавальної антени з керованою поляризацією (3) і випромінюється антеною (3) у напрямку на досліджуваний метеорологічний об'єкт. Відбитий від метеорологічного об'єкта сигнал приймається антеною (3) і через антенний перемикач (4) надходить на вхід приймача (6). Поляризацією зондувального імпульсу й поляризацією сигналу переданого на вхід приймача керує блок (2) по шинах (33 і 34), причому залежно від комбінації керуючих імпульсів на шинах (33 і 34) можлива одна із чотирьох комбінацій поляризації випроміненого і прийнятого коливань відповідно до наступної табл. 1. Таблиця 1 Умовний Напруга на номер періоду шині 33 повторення 1 U0 2 0 3 U1 4 0 40 45 50 Напруга на шині 34 0 U2 U2 0 Поляризація випромінюваного імпульсу Горизонтальна Вертикальна Горизонтальна Вертикальна Поляризація прийомного імпульсу Вертикальна Горизонтальна Горизонтальна Вертикальна Позначення ху ух xx уу Приймач (6) має амплітудно-логарифмічну характеристику. Зазначені в таблиці чотири комбінації (хх, ух, ху, уу) реалізуються послідовно протягом чотирьох суміжних періодів повторення зондувальних імпульсів. В момент випромінювання кожного зондувального імпульсу передавач (1) формує старт-імпульс (короткий відеоімпульс), який подається на вузол формування керуючих імпульсів (2), схему перемінної затримки (5) і датчик температури метеорологічного об'єкту (25). Блок (2) - вузол формування керуючих імпульсів - формує на нижніх (див. Фіг. 1) своїх виходах імпульси, рівні по тривалості періоду повторення зондувальних імпульсів, причому ці імпульси формуються по черзі на 1-м, 2-м, 3-м і 4-м виходах, з'єднаних відповідно з першими входами першої (блок 19), другої (блок 20), третьої (блок 21) і четвертої (блок 22) схем логічного збігу ("І"). А на другі входи цих схем збігу надходять імпульси для стробування, які формуються блоком (7) зі старт-імпульсу, що затримується схемою перемінної затримки (блок 5). Час затримки СПЗ відповідає дальності до досліджуваного об'єму метеорологічного об'єкта, що відбиває зондувальний сигнал. Таким 2 UA 100763 U 5 10 15 20 25 30 35 40 45 50 55 60 чином, на виходах 1-ї, 2-ї, 3-ї і 4-ї схем логічного "І" (блоки 19-22) формуються імпульси що стробують схему в 1-й, 2-й, 3-й і 4-й періоди повторення зондувальних імпульсів відповідно. Ці імпульси для стробування надходять на керуючі входи відповідних схем спостереженнязберігання (блоки 8-11). На сигнальні входи ССЗ (блоки 8-11) надходить сигнал з виходу приймача. Оскільки ССЗ переводяться в режим зберігання імпульсами, для стробування послідовно в 1-й (ССЗ-1), 2-й (ССЗ-2), 3-й (ССЗ-3) і 4-й (ССЗ-4) періоди повторення, то за час, що не перевищує чотири періоди повторення на їхніх виходах утворюються рівні сигналів, які запам'ятовуються, що відповідають усім можливим комбінаціям поляризації ху, ух, хх і уу (див. табл. 1). Ці сигнали надходять на входи аналогових ключів (блоки 12-15), які одночасно відкриваються імпульсом з виходу блоку (22) один раз за 4 періоди повторення. Пристрій віднімання (16) утворює різницевий сигнал із сигналів ху й ух, які надходять на його входи з виходів блоків (12) і (13). Потім блок (28) виділяє модуль різницевого сигналу, який випробовується на поріг наступним компаратором (блок 23). Аналогічні операції виконують блоки (18), (29) і (24) над сигналами хх і уу, що надходять із виходів блоків (14) і (15). Напруга сигналу ух, крім того, випробовується на поріг першим компаратором (блок 17). На виході блоку (25) формується сигнал, пропорційний температурі досліджуваного об'єкта, який випробовується на поріг за допомогою четвертого компаратора (блок 27). П'ята, шоста й сьома схеми "І" (блоки 26, 30, 31) забезпечують формування на виході блока (31) сигналу тільки в тому випадку, якщо на виходах усіх чотирьох компараторів (блоки 17, 23, 24 і 27) були утворені сигнали, відповідні до підвищення граничних напруг Uб, Uγ, Uε і Ut що задаються задавачем n порогів (блок 32). Вихід блока (31) є виходом пристрою, сигнал з якого може подаватися на сигналізатор ЗМО, індикатор або для подальшої обробки в системі більш високого рівня. Час затримки СПЗ (блок 5) може регулюватися, змінюючи положення досліджуваного обсягу по дальності. У якості СПЗ може бути використаний, наприклад, мультивібратор з очікуванням з регульованою тривалістю імпульсу, задній фронт імпульсу якого (через диференційне коло) використовується для запуску схеми формування строба блоком (7), який може являти собою мультивібратор з очікуванням. Змінюючи тривалість імпульсу СПЗ можна послідовно досліджувати об'єкти, що відбивають, перебуваючи на різних відстанях. Вихід блока (31) є виходом обладнання, сигнал з якого може подаватися на сигналізатор ЗМО. Необхідно зауважити, що обладнання на Фіг. 1 лише ілюструє можливість реалізації запропонованого способу локалізації ЗМО. Його можна виконати в наведеному для наочності аналоговому варіанті і у багатоканальному варіанті, щоб підвищити оперативність аналізу метеорологічної обстановки (одночасно по декількох або по всіх каналах дальності). Функціональна схема блоку (3) - антени з керованою поляризацією (АКП) наведена на Фіг. 2. АКП складається з відбивача (3-1), опромінювача (3-2), пристрою обертання площини поляризації (3-3), поляризаційного фільтра (3-4), комутатора (3-5), двох циркуляторів (3-6) і (3-7) і переходу (3-8) обертового. Наявність керуючого імпульсу U1 на шині (33) (керуючий вхід пристрою обертання площини поляризації (3-3)) забезпечує горизонтальну поляризацію випромінюваних коливань, а його відсутність - вертикальну. При прийомі на шині (1) фільтра (34) поляризаційного сигналу виділяється основна (тобто тієї ж поляризації, що у випроміненому сигналі) компонента відбитого сигналу, на шині (2) - ортогональна компонента. Ці складові (компоненти) прийнятого сигналу надходять на входи комутатора відповідно на вхід (1) через циркулятори (3-6) і (3-7) і на вхід (2) безпосередньо від блоку (3-4). Стан комутатора (3-5) визначається наявністю або відсутністю імпульсу U2, що надходить по шині (34) на його керуючий вхід. Прийнятий сигнал проходить із виходу комутатора на антенний перемикач (блок 4) через циркулятори (3-7), (3-6) і обертовий перехід (3-8) (обертовий перехід не є елементом, що впливають на сутність запропонованого способу, а відображує тільки процес огляду простору з механічним скануванням). Функціональна схема блоку (2) (ВФКІ) показана на Фіг. 3. Цей блок забезпечує формування керуючих сигналів відповідно до часових діаграм (див. Фіг. 4). ВФКІ складається з першого та другого тригерів (2-1) і (2-2), першої і другої схем заборони (2-3) і (2-4) і чотирьох двовходових схем "І" (2-5), (2-6), (2-7), (2-8). Позначення на часових діаграмах на Фіг. 4 повністю відповідають позначенням на схемах № 2, № 3 і № 4. Запропонований пристрій дозволяє дистанційно оперативно визначати наявність і місце розташування зон можливого обледеніння з борта ПС за допомогою зондування хмар електромагнітними коливаннями. При цьому досягається підвищення вірогідності локалізації ЗМО у порівнянні із прототипом пристрою за рахунок зменшення імовірності хибної тривоги, оскільки в якості ЗМО не ідентифікуються ті хмари, які складаються із крижаних кристалів, а також ті водяні хмари, які не містять переохолоджених крапель. 3 UA 100763 U 5 10 15 20 25 Джерела інформації: 1. Бондарчук И.Е., Харин В.И. Авиационное и радиоэлектронное оборудование самолета Як-40. М.: Транспорт, 1976р, 288 с. 2. Метеонавигационный радиолокатор "Гроза". Инструкция по эксплуатации. Часть 2. Летная эксплуатация. В/О "Авиаэкспорт", СССР, Москва, 21.04.71. - 56 с. 3. Яковлев А.М. Авиационная метеорология. М.:Транспорт, 1971. - С. 133-146. 4. Хейфец М.И. Обработка результатов испытаний. Алгоритмы, номограммы, таблицы. М.: Машиностроение. 1988.-168 с. (справ. б-ка авиац. Инж.-испытателя). ФОРМУЛА КОРИСНОЇ МОДЕЛІ Пристрій для визначення зон можливого обледеніння літаків і гелікоптерів, який складається із блока 1 - передавача (ПРД1), блока 3 - антени, блока 4 - антенного перемикача (АП), блока 6 приймача (ПРМ), який відрізняється тим, що до схеми введено наступні елементи: блок 2 вузол формування керуючих імпульсів (ВФКІ), блок 3 - антена з керованою поляризацією (АКП), введено блок 4 - антенний перемикач (АП), блок 5 - схема перемінної затримки (СПЗ), блок 7 схема формування строба (СФС), блоки 8, 9, 10 та 11 - відповідно перша, друга, третя й четверта схеми спостереження-зберігання (ССЗ), блоки 12, 13, 14 та 15 - відповідно перший, другий, третій та четвертий аналогові ключі (КЛ), блок 16 - перший пристрій віднімання (ПРВІД), блок 17 - перший аналоговий компаратор (КОМП), блок 18 - другий пристрій віднімання, блоки 19, 20, 21 і 22 - відповідно перша, друга, третя та четверта схеми логічного множення (схеми логічного І), блоки 23 і 24 - другий і третій аналогові компаратори, блок 25 - вимірювач температури метеорологічного об'єкта (ВИМ-Т), блок 26 - п'ята схема логічного множення (І), блок 27 - четвертий аналоговий компаратор, блоки 28 і 29 - перша і друга схеми виділення абсолютної величини сигналу (СВАВ), блоки 30 і 31 - шоста і сьома схеми логічного множення (І), блок 32 - задавач порогів (ЗАД-П). 4 UA 100763 U 5 UA 100763 U 6 UA 100763 U 7 UA 100763 U Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 5/06, G01S 13/95
Мітки: літаків, пристрій, визначення, зон, обледеніння, можливого, гелікоптерів
Код посилання
<a href="https://ua.patents.su/10-100763-pristrijj-dlya-viznachennya-zon-mozhlivogo-obledeninnya-litakiv-i-gelikopteriv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення зон можливого обледеніння літаків і гелікоптерів</a>
Спосіб визначення зон можливого обледеніння літаків і гелікоптерів
Номер патенту: 98228
Опубліковано: 27.04.2015
Автори: Пітерцев Олександр Андрійович, Яновький Фелікс Йосипович
МПК: G01S 13/95
Мітки: обледеніння, визначення, зон, спосіб, гелікоптерів, можливого, літаків
Формула / Реферат:
Спосіб визначення зон можливого обледеніння літаків і гелікоптерів, що полягає в тому, що формується голчаста діаграма спрямованості антени, випромінюються імпульси електромагнітних коливань, приймаються відбиті сигнали, здійснюється їх детектування, посилення і відображення на екрані спеціального пристрою відображення інформації або передача для обробки на пристрій більш високого рівня, який відрізняється тим, що, під час випромінювання...
Рлс виявлення гвинтових літаків та гелікоптерів
Номер патенту: 24427
Опубліковано: 17.07.1998
Автори: Касаткін Леонід Веніамінович, Феньов Дмитро Васильйович, Рогов Петро Дмитрович
МПК: G01S 13/00
Мітки: гвинтових, виявлення, рлс, гелікоптерів, літаків
Формула / Реферат:
РЛС обнаружения винтовых самолетов и вертолетов, содержащая импульсный передатчик СВЧ, включающий импульсный модулятор и генератор зондирующих когерентных СВЧ радиоимпульсов, приемное устройство, включающее смеситель, усилитель отраженных сигналов с полосой пропускания, равной интервалу доплеровских частот, соответствующих интервалу измеряемых скоростей цепи, гребенчатый фильтр для определения скорости цели и индикаторы дальности и скорости...
Пристрій для захисту оптичної системи від обледеніння і роси
Номер патенту: 86400
Опубліковано: 25.12.2013
Автори: Благодир Ярослав Тимофійович, Стоділка Мирон Іванович, Вовчик Єва Богданівна, Янків-Вітковська Любов Миколаївна, Дейнека Ростислав Михайлович, Білінський Андрій Іванович, Мартинюк-Лотоцький Костянтин Павлович
МПК: G02B 23/16
Мітки: захисту, системі, роси, пристрій, обледеніння, оптично
Формула / Реферат:
Пристрій для захисту оптичної системи від обледеніння і роси, що містить дзеркало в оправі, встановлене на гідувальному монтуванні телескопа, який відрізняється тим, що додатково містить нагрівні елементи та вентилятори, встановлені попарно і симетрично на оправі дзеркала.
Пристрій для усунення обледеніння в тунелі
Номер патенту: 36022
Опубліковано: 16.04.2001
Автори: Косяк Вікторія Миколаївна, Філь Петро Миколайович, Балашова Юлія Борисівна, Рубан Олег Анатолійович
МПК: E21F 16/00
Мітки: усунення, пристрій, тунелі, обледеніння
Текст:
...транспорту 36022 Пристрій працює за такою послідовністю. За необхідності усунення обледеніння включають джерело нагрівання 6. Частини 2 пластини 1 нагріваються швидше, ніж частини 3, внаслідок чого відбувається вигинання пластини 1 в сторону криги. Обледеніння руйнується i відпадає від поверх ні. При виключені джерела 6 пластини 1 охолоджуються та приймають початковий вигляд. Запропонований пристрій раціонально встановлювати на тих...
Пристрій для запобігання обледеніння лінії електропередачі
Номер патенту: 102263
Опубліковано: 25.06.2013
Автор: Стельмах Євген Степанович
МПК: H01B 17/52, H02G 7/16
Мітки: обледеніння, запобігання, лінії, пристрій, електропередачі
Формула / Реферат:
Пристрій для запобігання обледеніння лінії електропередачі, що містить елемент нагрівання зазначеної лінії електропередачі для руйнування ожеледі, який відрізняється тим, що в нього додатково введені ізольований електропровід струму високої частоти, регулятор частоти струму, датчики визначення температури і вологості атмосферного повітря, оточуючого лінію електропередачі, та автоматичний вмикач пристрою, при цьому як елемент нагрівання...
Попередній патент: Спосіб визначення координат вимірювального перетворювача дефектоскопа при скануванні поверхонь об’єктів
Наступний патент: Пристрій для лікування храпу
Випадковий патент: Привід круглов'язальної машини