Система орієнтації малогабаритного безпілотного літального апарата
Номер патенту: 102894
Опубліковано: 25.11.2015
Автори: Жежера Іван Володимирович, Будіба Уіссам, Фірсов Сергій Миколайович

Формула / Реферат
Система орієнтації малогабаритного безпілотного літального апарата, яка містить блок датчиків прискорень, вихід якого з'єднаний з першим входом блока пристрою для обробки та виведення просторової інформації, блок супутникової навігації, вихід якого з'єднаний з другим входом блока пристрою для обробки та виведення просторової інформації, блока живлення, вихід якого з'єднаний з третім входом блока пристрою для обробки та виведення просторової інформації, яка відрізняється тим, що в систему введені блок формування сигналу, вихід якого з'єднаний з четвертим входом блока пристрою для обробки та виведення просторової інформації, блок підсилювача сигнала, вихід якого з'єднаний з входом блока сервоприводів, а вхід з'єднаний з виходом блока пристрою для обробки та виведення просторової інформації, вихід блока сервоприводів з'єднаний з входом блока підвісу камери, вихід якого з'єднаний з п'ятим входом блока пристрою для обробки та виведення просторової інформації та блок датчиків кутової швидкості, вихід якого з'єднаний з шостим входом блока пристрою для обробки та виведення просторової інформації.
Текст
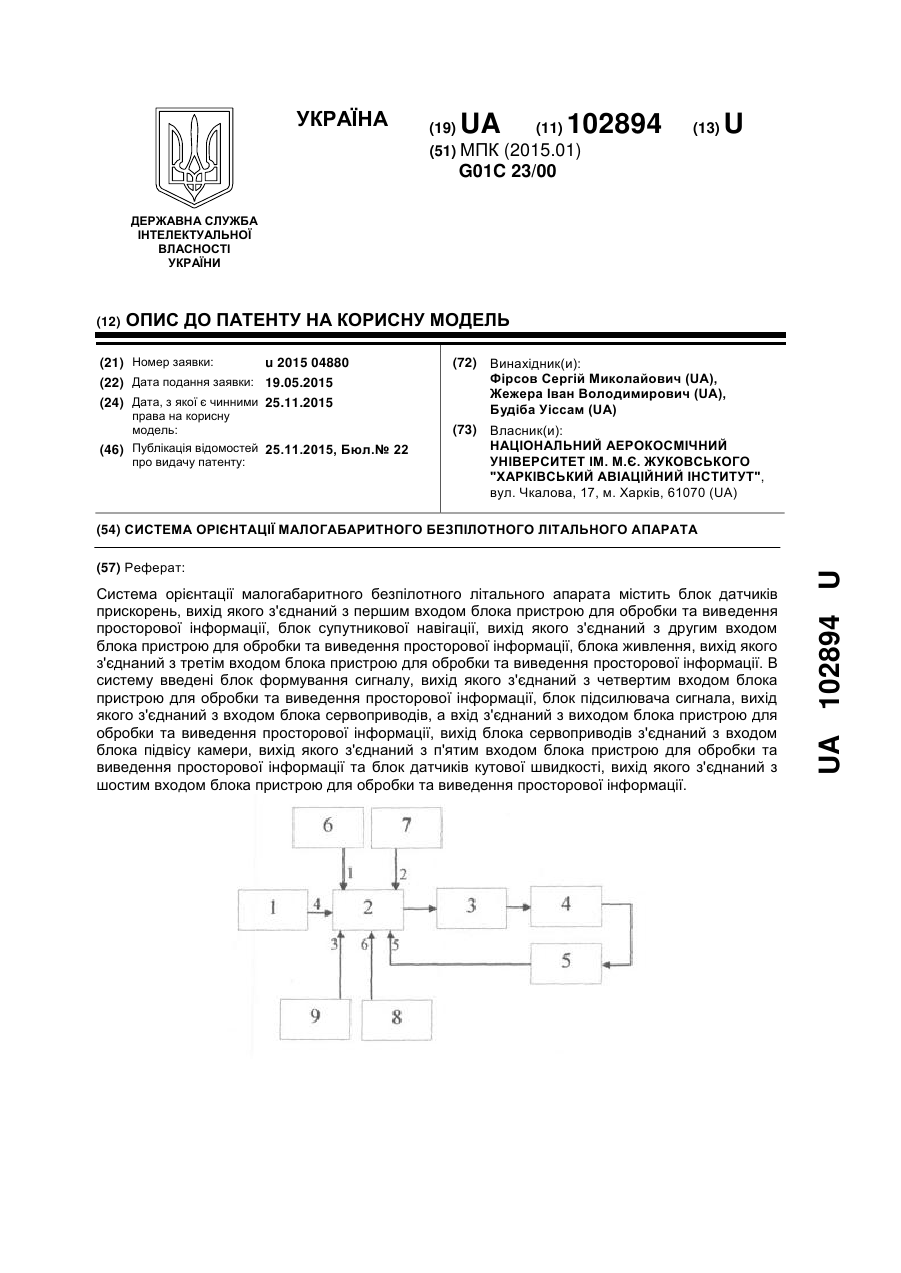
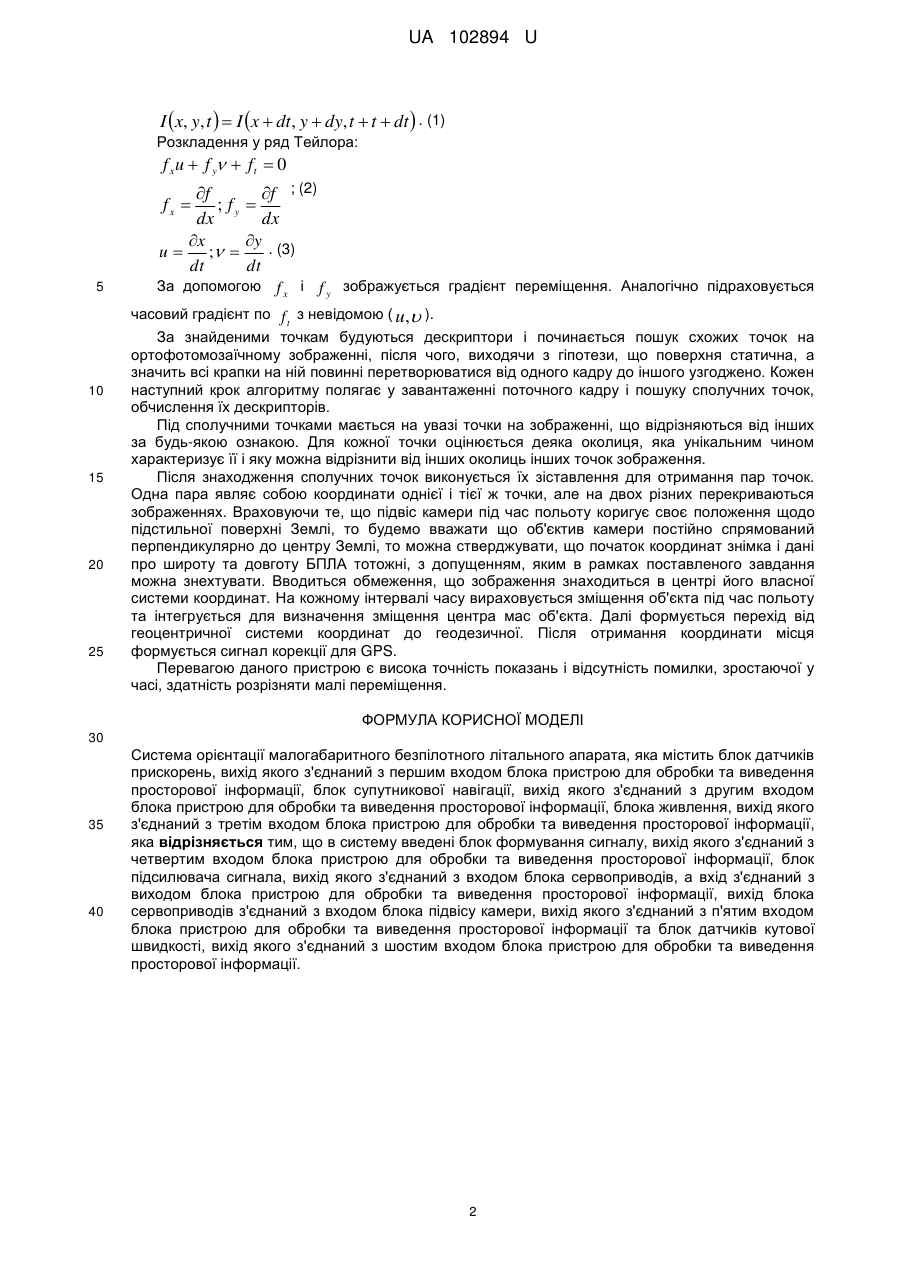
Реферат: Система орієнтації малогабаритного безпілотного літального апарата містить блок датчиків прискорень, вихід якого з'єднаний з першим входом блока пристрою для обробки та виведення просторової інформації, блок супутникової навігації, вихід якого з'єднаний з другим входом блока пристрою для обробки та виведення просторової інформації, блока живлення, вихід якого з'єднаний з третім входом блока пристрою для обробки та виведення просторової інформації. В систему введені блок формування сигналу, вихід якого з'єднаний з четвертим входом блока пристрою для обробки та виведення просторової інформації, блок підсилювача сигнала, вихід якого з'єднаний з входом блока сервоприводів, а вхід з'єднаний з виходом блока пристрою для обробки та виведення просторової інформації, вихід блока сервоприводів з'єднаний з входом блока підвісу камери, вихід якого з'єднаний з п'ятим входом блока пристрою для обробки та виведення просторової інформації та блок датчиків кутової швидкості, вихід якого з'єднаний з шостим входом блока пристрою для обробки та виведення просторової інформації. UA 102894 U (54) СИСТЕМА ОРІЄНТАЦІЇ МАЛОГАБАРИТНОГО БЕЗПІЛОТНОГО ЛІТАЛЬНОГО АПАРАТА UA 102894 U UA 102894 U 5 10 15 20 25 30 35 40 45 50 55 Запропонована корисна модель належить до авіакосмічної техніки. Найбільш близькою до запропонованої є система для визначення просторово-часової орієнтації автотранспортних засобів, яка у своєму складі має блок акселерометрів, блок супутникової навігаційної системи, блок пристрою для обробки та виведення просторової інформації та блок живлення, (див.: Патент України № 38742, G01C23/00, опубл. 12.01.09 Бюл. № 1). Недоліком такої системи є те, що система має досить високу точність тільки під час ясної погоди, коли бачить велику кількість супутників. Коли хмарність стає більше і сигнал GPS слабшає точність блока акселерометрів зменшується з часом, що робить систему непрацездатною під час польоту. В основу корисної моделі поставлена задача підвищення точності вимірювання параметрів орієнтації БПЛА. Поставлена задача вирішується тим, що в систему орієнтації, яка містить блок датчиків прискорень, вихід якого з'єднаний з першим входом блока пристрою для обробки та виведення просторової інформації, блок супутникової навігації, вихід якого з'єднаний з другим входом блока пристрою для обробки та виведення просторової інформації, блока живлення, вихід якого з'єднаний з третім входом блока пристрою для обробки та виведення просторової інформації, згідно з корисною моделлю, в систему введені блок формування сигналу, вихід якого з'єднаний з четвертим входом блока пристрою для обробки та виведення просторової інформації, блок підсилювача сигнала, вихід якого з'єднаний з входом блока сервоприводів, а вхід з'єднай з виходом блока пристрою для обробки та виведення просторової інформації, вихід блока сервоприводів з'єднаний з входом блока підвісу камери, вихід якого з'єднай з п'ятим входом блока пристрою для обробки та виведення просторової інформації та блок датчиків кутової швидкості, вихід якого з'єднай з шостим входом блока пристрою для обробки та виведення просторової інформації. На кресл. зображена функціональна схема системи орієнтації малогабаритного безпілотного літального апарата. Система орієнтації малогабаритного безпілотного літального апарата містить послідовно з'єднаний блок формування сигналу 1, блок пристрою для обробки та виведення просторової інформації 2, блок підсилювача сигналу З, блок сервоприводів 4, блок підвісу камери 5, вихід блока підвісу камери 5 з'єднаний з п'ятим входом блока пристрою для обробки та виведення просторової інформації 2, блоки датчиків прискорень 6, супутникової навігації 7, датчиків кутової швидкості 8, живлення 9 під'єднані до блока пристрою для обробки та виведення просторової інформації 2. Застосування мікромеханічних датчиків кутової швидкості та лінійного прискорення дозволяє створювати комплексувальні безплатформенні інерціальні системи навігації та орієнтації, призначені для вирішення завдань при необмежених діапазонах зміни лінійних і кутових координат МЛА. Перевагою мікромеханічних датчиків є малі масово-габаритні показники, низька вартість, простота експлуатації, зручна форма надання інформації на виході датчика. Однак зазначені властивості МЕМС не забезпечують її застосування в автономному режимі роботи, так як точність роботи БІНС безпосередньо залежить від часу, що визначає незначні тимчасові інтервали її застосування в такому виконанні. Перевагою цієї системи орієнтації є метод визначення параметрів руху, який полягає у визначенні характерних точок у кожному кадрі оптичного потоку. Аналіз їх переміщення від кадру до кадру дає інформацію про рух об'єкта без накопичення помилок. Система працює таким чином, що з блока формування сигналу 1 подається сигнал керування на блок пристрою для обробки та виведення просторової інформації 2, у якому визначаються параметри просторового знаходження об'єкту за допомогою інформації з блока датчиків прискорень 6, блока супутникової навігації 7 та блока датчиків кутової швидкості 8. За допомогою блоків 6 і 8 вимірюється кутове положення об'єкту для створення сигналу корекції підвісу камери у блоці пристрою для обробки та виведення просторової інформації 2 з подальшим наданням сигналу керування у блок підсилювача сигналу 3 для виконання стабілізації кутового положення підвісу камери 5 відносно поверхні Землі за допомогою блока сервоприводів 4. У блоці пристрою для обробки та виведення просторової інформації 2 закладено алгоритм реєстрації руху, який фіксується методами реєстрації однорідної інтенсивності пікселів між послідовними кадрами і визначенням однорідності руху пікселів; Нехай I x, y, t - це піксель у першому кадрі. 1 UA 102894 U I x, y, t I x dt, y dy, t t dt . (1) Розкладення у ряд Тейлора: f x u f y f t 0 f f ; (2) ; fy dx dx x y . (3) u ; dt dt За допомогою f x і f y зображується градієнт переміщення. Аналогічно підраховується fx 5 10 15 20 25 часовий градієнт по f t з невідомою ( u, ). За знайденими точкам будуються дескриптори і починається пошук схожих точок на ортофотомозаїчному зображенні, після чого, виходячи з гіпотези, що поверхня статична, а значить всі крапки на ній повинні перетворюватися від одного кадру до іншого узгоджено. Кожен наступний крок алгоритму полягає у завантаженні поточного кадру і пошуку сполучних точок, обчислення їх дескрипторів. Під сполучними точками мається на увазі точки на зображенні, що відрізняються від інших за будь-якою ознакою. Для кожної точки оцінюється деяка околиця, яка унікальним чином характеризує її і яку можна відрізнити від інших околиць інших точок зображення. Після знаходження сполучних точок виконується їх зіставлення для отримання пар точок. Одна пара являє собою координати однієї і тієї ж точки, але на двох різних перекриваються зображеннях. Враховуючи те, що підвіс камери під час польоту коригує своє положення щодо підстильної поверхні Землі, то будемо вважати що об'єктив камери постійно спрямований перпендикулярно до центру Землі, то можна стверджувати, що початок координат знімка і дані про широту та довготу БПЛА тотожні, з допущенням, яким в рамках поставленого завдання можна знехтувати. Вводиться обмеження, що зображення знаходиться в центрі його власної системи координат. На кожному інтервалі часу вираховується зміщення об'єкта під час польоту та інтегрується для визначення зміщення центра мас об'єкта. Далі формується перехід від геоцентричної системи координат до геодезичної. Після отримання координати місця формується сигнал корекції для GPS. Перевагою даного пристрою є висока точність показань і відсутність помилки, зростаючої у часі, здатність розрізняти малі переміщення. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 Система орієнтації малогабаритного безпілотного літального апарата, яка містить блок датчиків прискорень, вихід якого з'єднаний з першим входом блока пристрою для обробки та виведення просторової інформації, блок супутникової навігації, вихід якого з'єднаний з другим входом блока пристрою для обробки та виведення просторової інформації, блока живлення, вихід якого з'єднаний з третім входом блока пристрою для обробки та виведення просторової інформації, яка відрізняється тим, що в систему введені блок формування сигналу, вихід якого з'єднаний з четвертим входом блока пристрою для обробки та виведення просторової інформації, блок підсилювача сигнала, вихід якого з'єднаний з входом блока сервоприводів, а вхід з'єднаний з виходом блока пристрою для обробки та виведення просторової інформації, вихід блока сервоприводів з'єднаний з входом блока підвісу камери, вихід якого з'єднаний з п'ятим входом блока пристрою для обробки та виведення просторової інформації та блок датчиків кутової швидкості, вихід якого з'єднаний з шостим входом блока пристрою для обробки та виведення просторової інформації. 2 UA 102894 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюAttitude control system for small-scale pilotless vehicle
Автори англійськоюFirsov Serhii Mykolaiovych, Zhezhera Ivan Volodymyrovych, Budiba Uissam
Назва патенту російськоюСистема ориентации малогабаритного беспилотного летательного аппарата
Автори російськоюФирсов Сергей Николаевич, Жежера Иван Владимирович, Будиба Уиссам
МПК / Мітки
МПК: G01C 23/00
Мітки: система, літального, орієнтації, малогабаритного, безпілотного, апарата
Код посилання
<a href="https://ua.patents.su/5-102894-sistema-oriehntaci-malogabaritnogo-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система орієнтації малогабаритного безпілотного літального апарата</a>
Система стабілізації бокового каналу безпілотного літального апарата
Номер патенту: 36498
Опубліковано: 27.10.2008
Автори: Бондар Катерина Михайлівна, Жалніна Вікторія Василівна, Амелін Сергій Вікторович
МПК: G05D 1/03
Мітки: стабілізації, апарата, безпілотного, бокового, літального, каналу, система
Формула / Реферат:
Система стабілізації бокового каналу безпілотного літального апарата, що містить перший та другий порівнювальні пристрої, електронні ключі, сервопривід, вихід якого з'єднаний з входом об'єкта керування, а вхід - з виходом першого блока формування керуючих сигналів, датчик кута та датчик кутової швидкості, які послідовно з'єднані з виходами об'єкта керування, яка відрізняється тим, що до її складу введені нормуючі підсилювачі, входи яких...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Величко Надія Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: літального, апарата, стабілізації, безпілотного, система
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система керування безпілотного літального апарата

Номер патенту: 65814
Опубліковано: 12.12.2011
Автори: Антонєвич Ганна Олександрівна, Кописов Олег Едуардович, Фірсов Сергій Миколайович
МПК: B64C 13/00
Мітки: літального, керування, апарата, система, безпілотного
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також трьох датчиків кута та трьох датчиків кутової швидкості, виходи яких з'єднані з входами відповідно першого, п'ятого, шостого, другого, сьомого, восьмого нормуючих підсилювачів,...
Відмовостійка система керування боковим рухом безпілотного літального апарата

Номер патенту: 35088
Опубліковано: 26.08.2008
Автори: Симонов Володимир Федорович, Амеліна Ірина Вікторівна, Бандура Іван Миколайович
МПК: G05D 1/03, B64C 13/00
Мітки: рухом, апарата, система, боковим, літального, керування, безпілотного, відмовостійка
Формула / Реферат:
Відмовостійка система керування боковим рухом безпілотного літального апарата, що містить перший датчик кутової швидкості рискання, перший та другий суматори, перший та другий підсилювачі, привід керма напрямку, датчик положення керма напрямку, перший датчик кутової швидкості крену, привід елеронів, обчислювач значень кута крену, перший, другий датчики тиску, датчик положення елеронів, блок віднімання, формувач значень сигналу кута ковзання,...
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Симонов Володимир Федорович, Бойко Євгенія Анатоліївна
МПК: G05D 1/03
Мітки: літального, кутової, апарата, відмовостійка, система, стабілізації, безпілотного
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової...
Попередній патент: Безступінчаста коробка передач з конусними барабанами та косим шарнірним з’єднанням пластин ланцюга
Наступний патент: Формувач періодичної послідовності триімпульсних кодових серій з програмованою тривалістю паузи між імпульсами у серії
Випадковий патент: Засіб для корекції змін вмісту цитокінів в плазмі крові в комплексній терапії хворих на бронхіальну астму