Система стабілізації літального апарата
Номер патенту: 103636
Опубліковано: 25.12.2015
Автори: Субота Анатолій Максимович, Симонов Володимир Федорович, Куліш Марія Валентинівна
Формула / Реферат
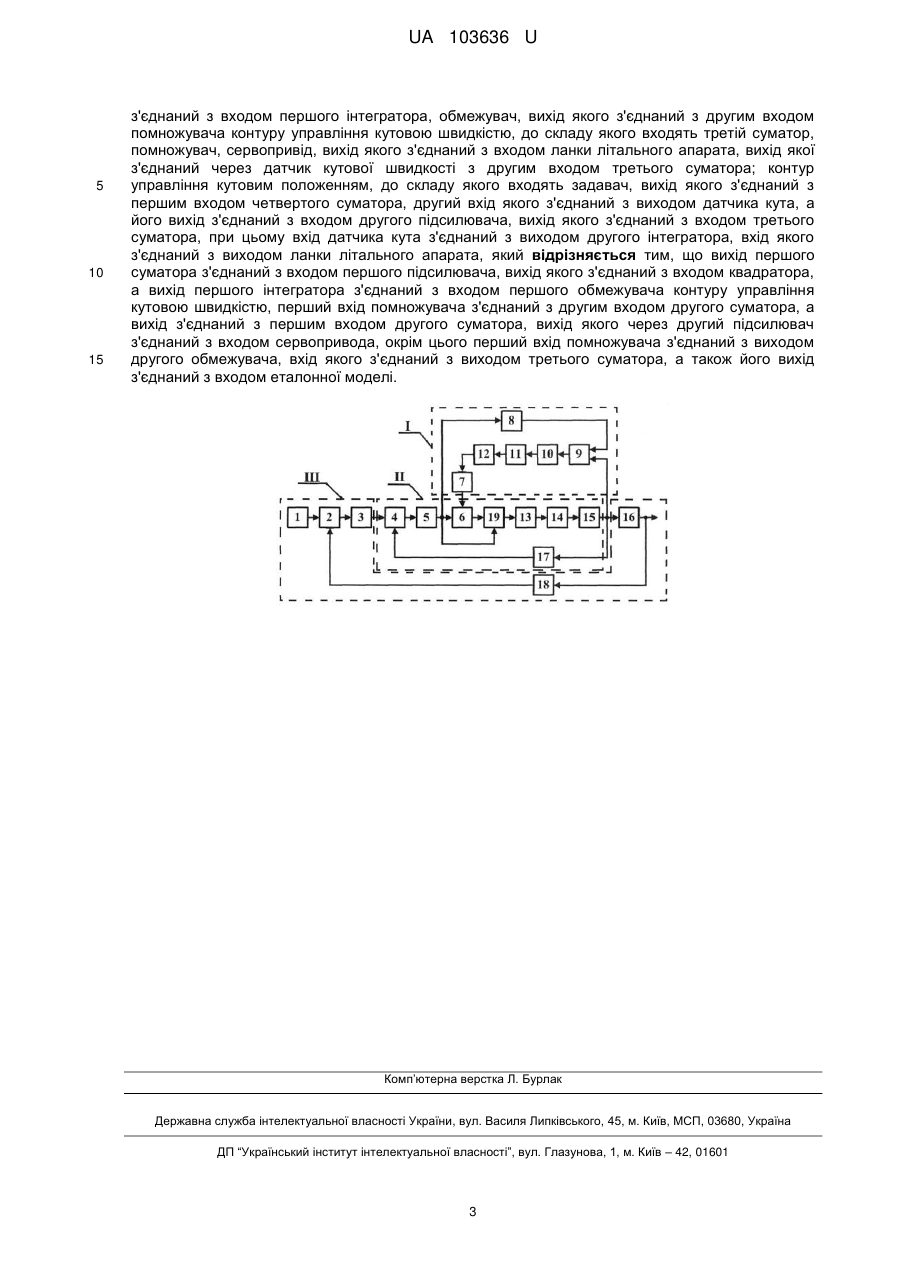
Система стабілізації літального апарата, яка містить контур самоналагоджування, до складу якого входять еталонна модель, вихід якої з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з виходом ланки літального апарата, квадратор, вихід якого з'єднаний з входом першого інтегратора, обмежувач, вихід якого з'єднаний з другим входом помножувача контуру управління кутовою швидкістю, до складу якого входять третій суматор, помножувач, сервопривід, вихід якого з'єднаний з входом ланки літального апарата, вихід якої з'єднаний через датчик кутової швидкості з другим входом третього суматора; контур управління кутовим положенням, до складу якого входять задавач, вихід якого з'єднаний з першим входом четвертого суматора, другий вхід якого з'єднаний з виходом датчика кута, а його вихід з'єднаний з входом другого підсилювача, вихід якого з'єднаний з входом третього суматора, при цьому вхід датчика кута з'єднаний з виходом другого інтегратора, вхід якого з'єднаний з виходом ланки літального апарата, який відрізняється тим, що вихід першого суматора з'єднаний з входом першого підсилювача, вихід якого з'єднаний з входом квадратора, а вихід першого інтегратора з'єднаний з входом першого обмежувача контуру управління кутовою швидкістю, перший вхід помножувача з'єднаний з другим входом другого суматора, а вихід з'єднаний з першим входом другого суматора, вихід якого через другий підсилювач з'єднаний з входом сервопривода, окрім цього перший вхід помножувача з'єднаний з виходом другого обмежувача, вхід якого з'єднаний з виходом третього суматора, а також його вихід з'єднаний з входом еталонної моделі.
Текст
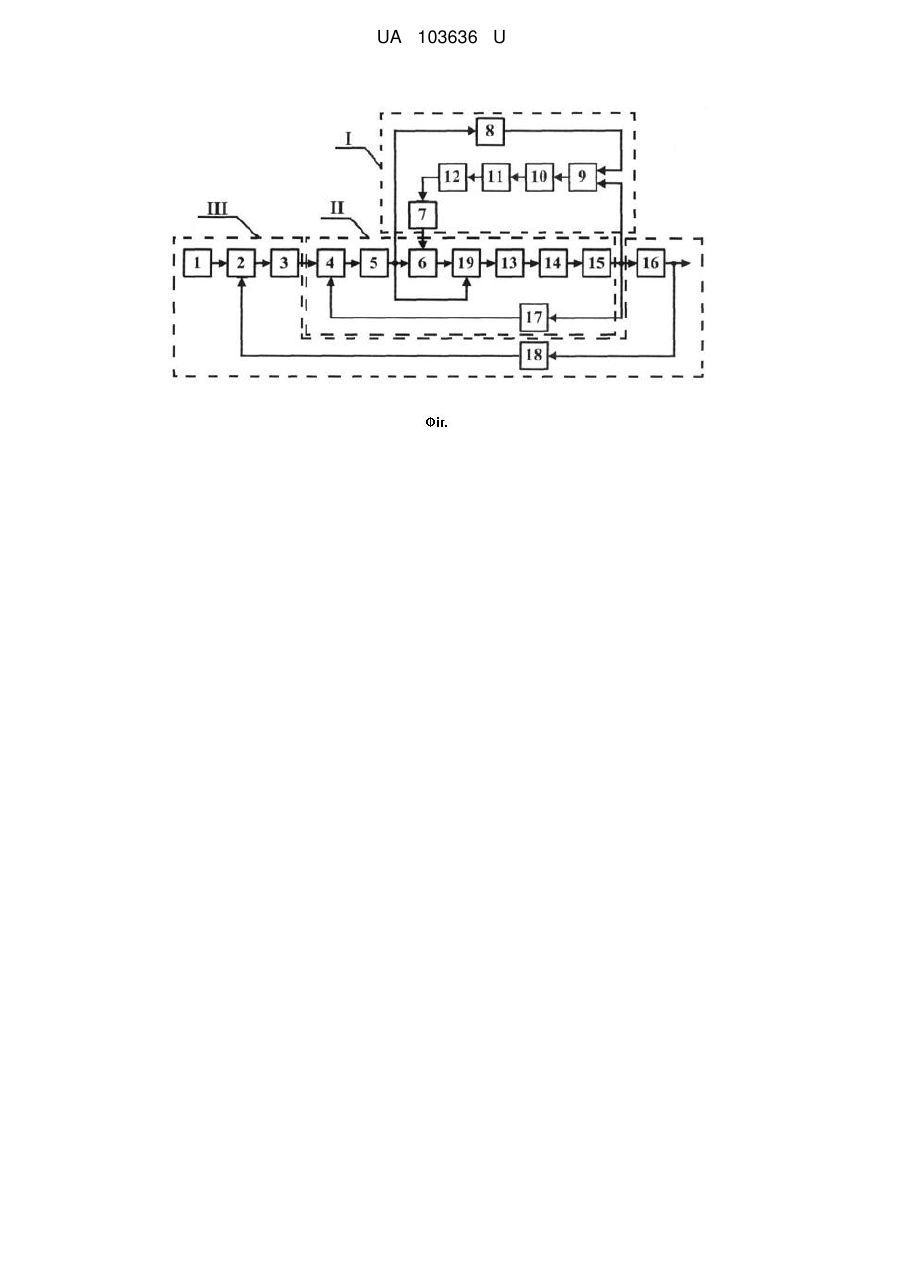
Реферат: Система стабілізації літального апарата, яка містить контур самоналагоджування, до складу якого входять еталонна модель, вихід якої з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з виходом ланки літального апарата, квадратор, вихід якого з'єднаний з входом першого інтегратора, обмежувач, вихід якого з'єднаний з другим входом помножувача контуру управління кутовою швидкістю, до складу якого входять третій суматор, помножувач, сервопривід, вихід якого з'єднаний з входом ланки літального апарата, вихід якої з'єднаний через датчик кутової швидкості з другим входом третього суматора; контур управління кутовим положенням, до складу якого входять задавач, вихід якого з'єднаний з першим входом четвертого суматора, другий вхід якого з'єднаний з виходом датчика кута, а його вихід з'єднаний з входом другого підсилювача, вихід якого з'єднаний з входом третього суматора, при цьому вхід датчика кута з'єднаний з виходом другого інтегратора, вхід якого з'єднаний з виходом ланки літального апарата. Вихід першого суматора з'єднаний з входом першого підсилювача, вихід якого з'єднаний з входом квадратора, а вихід першого інтегратора з'єднаний з входом першого обмежувача контуру управління кутовою швидкістю, перший вхід помножувача з'єднаний з другим входом другого суматора, а вихід з'єднаний з першим входом другого суматора, вихід якого через другий підсилювач з'єднаний з входом сервопривода, окрім цього перший вхід помножувача з'єднаний з виходом другого обмежувача, вхід якого з'єднаний з виходом третього суматора, а також його вихід з'єднаний з входом еталонної моделі. UA 103636 U (12) UA 103636 U UA 103636 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем управління літальними апаратами і може бути використана в авіаційній техніці при розробці систем кутової стабілізації, наприклад автопілотів. Відома двоканальна система управління літальним апаратом, яка містить у своєму складі послідовно з'єднані обчислювач, підсилювач, рульову машину, орган управління, датчик кута та датчик кутової швидкості літального апарата (ЛА) (Боднер В.А. Системы управления летательными аппаратами [Текст] / В.А. Боднер. - М. Машиностроение, 1973. - 506 с. - ст. 81, рис. 2.22). Недоліком цієї системи є відсутність контуру самоналагоджування. Найбільш близькою до запропонованої системи стабілізації літального апарата є система стабілізації літального апарата, що містить контур самоналагоджування, до складу якого входять еталонна модель, вихід якої з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з виходом ланки літального апарата, а вихід через послідовно з'єднаний квадратор і перший інтегратор з'єднаний з першим входом другого суматора, до другого входу якого підключений блок опорної напруги, а вихід з'єднаний з входом обмежувача, вихід якого з'єднаний з другим входом помножувача контуру управління кутовою швидкістю, до складу якого входять третій суматор, вихід якого з'єднаний з першим входом помножувача, вихід якого з'єднаний з входом сервопривода, вихід якого з'єднаний з входом ланки літального апарата, вихід якої з'єднаний через датчик кутової швидкості з другим входом третього суматора; контур управління кутовим положенням, до складу якого входять задавач, вихід якого з'єднаний з першим входом четвертого суматора, другий вхід якого з'єднаний з входом підсилювача, вихід якого з'єднаний з входом еталонної моделі і першим входом третього суматора, при цьому вхід датчика кута з'єднаний з виходом другого інтегратора, вхід якого з'єднаний з виходом ланки літального апарата (Руководство к лабораторным работам по автоматическим системам управления полетом летательных аппаратов [Текст] / Ю.И. Кириленко, Ю.Н. Смирнов, Г.И. Федоренко, В.В. Павлов, О.А. Бабич. - М.: Издание ВВИА им. проф. Н.Е. Жуковского, 1962. - 176 с. - ст. 60, рис. 5.2). Недоліками цієї системи стабілізації ЛА є низька надійність функціонування, особливо при відмовах функціонування будь-якого елемента, що входить до контуру самоналагоджування, а також схема не може функціонувати при відсутності блока опорної напруги. В основу даної корисної моделі поставлена задача підвищення надійності функціонування системи стабілізації літального апарата навіть при умовах відмови функціонування будь-якого елемента, що входить до контуру самоналагоджування, а також при відсутності блока опорної напруги. Поставлена задача вирішується завдяки тому, що система стабілізації літального апарата, яка містить контур самоналагоджування, до складу якого входять еталонна модель, вихід якої з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з виходом ланки літального апарата, а вихід через послідовно з'єднаний квадратор і перший інтегратор з'єднаний з першим входом другого суматора, до другого входу якого підключений блок опорної напруги, а вихід з'єднаний з входом обмежувача, вихід якого з'єднаний з другим входом помножувача контуру управління кутовою швидкістю, до складу якого входять третій суматор, вихід якого з'єднаний з першим входом помножувача, вихід якого з'єднаний з входом сервопривода, вихід якого з'єднаний з входом ланки літального апарата, вихід якої з'єднаний через датчик кутової швидкості з другим входом третього суматора; контур управління кутовим положенням, до складу якого входять задавач, вихід якого з'єднаний з першим входом четвертого суматора, другий вхід якого з'єднаний з входом підсилювача, вихід якого з'єднаний з входом еталонної моделі і першим входом третього суматора, при цьому вхід датчика кута з'єднаний з виходом другого інтегратора, вхід якого з'єднаний з виходом ланки літального апарата згідно з корисною моделлю вихід першого суматора з'єднаний з входом першого підсилювача, вихід якого з'єднаний з входом квадратора, а вихід першого інтегратора з'єднаний з входом першого обмежувача контуру управління кутовою швидкістю, перший вхід помножувача з'єднаний з другим входом другого суматора, а вихід з'єднаний з першим входом другого суматора, вихід якого через другий підсилювач з'єднаний з входом сервопривода, окрім цього перший вхід помножувача з'єднаний з виходом другого обмежувача, вхід якого з'єднаний з виходом третього суматора, а також його вихід з'єднаний з входом еталонної моделі. Таким чином, введення додаткового зв'язку між першим входом помножувача і практично його виходом забезпечує працездатність системи стабілізації навіть при наявності відмов будьякого функціонального елемента, що входить до контуру самоналагоджування. Окрім цього, відпадає необхідність в наявності блока опорної напруги, який забезпечував наявність сигналу на другому вході помножувача, що необхідно для запуску схеми в роботу. 1 UA 103636 U Перераховані заходи безумовно підвищують надійність запропонованої системи стабілізації ЛА. 5 10 15 20 25 30 35 40 45 50 Суть корисної моделі пояснюється кресленням, де зображена загальна функціональна схема системи стабілізації літального апарата. На кресл. позначено: І - контур самоналагоджування, II - контур управління кутовою швидкістю, III - контур управління кутовим положенням. До складу контуру І входять наступні блоки: 7 - перший обмежувач, 8 - еталонна модель, 9 перший суматор, 10 - перший підсилювач, 11 - квадратор, 12 - перший інтегратор. До складу контуру II входять наступні блоки: 4 - третій суматор, 5 - другий обмежувач, 6 помножувач, 13 - третій підсилювач, 14 - сервопривід, 15 - ланка літального апарата, 19 - другий суматор, 17 - датчик кутової швидкості. До складу контуру III входять наступні блоки: 1 - задатчик, 2 - четвертий суматор, 3 - другий підсилювач, 16 - другий інтегратор, 18 - датчик кута. Система стабілізації літального апарата працює наступним чином. Запропонована система стабілізації відноситься до систем (автопілотів), що реалізують пропорційно-диференційний закон управління виду (відносно, наприклад, до режиму стабілізації по тангажу): рп К з К z z К з К z , (1) рп де - кут відхилення рульової поверхні (рулів висоти); - кут тангажа літака; з - задане значення кута тангажа літака (задається програмою польоту і реалізується згідно зі схемою за допомогою задавача 1); z - кутова швидкість тангажа; К , К z - коефіцієнти передачі системи за кутом тангажа та кутової швидкості тангажа відповідно. Як видно із схеми, реалізація закону стабілізації (1) здійснюється за допомогою датчиків кута 18 і кутової швидкості 17, задавача 1, четвертого суматора 2, третього суматора 4 і другого підсилювача 3. Сформований таким чином сигнал управління проходить другий обмежувач 5 і надходить як на перший вхід помножувача 6, так і на другий вхід другого суматора 19. Далі сигнал управління через третій підсилювач 13 надходить на вхід сервопривода 14. Сервопривід 14 відхиляє рулі висоти літального апарата і літальний апарат займає задане положення відносно осі OZ. На схемі літальний апарат сумісно з його органами управління представлено як ланку літального апарата 15. Після розробки схеми і її випробуваннях здійснюється настроювання різноманітних параметрів, що необхідно для забезпечення вимог технічного завдання відносно показників якості (часу перехідного процесу - tпп, перерегулювання - σ, запасів стійкості по амплітуді Аз та фазі φ3 і т.і.). В процесі експлуатації внаслідок старіння окремі параметри функціональних елементів змінюються, наприклад, змінюється загальний коефіцієнт передачі контуру управління кутовою швидкістю II. В цьому випадку виробляється на виході першого суматора 9 різницевий сигнал між вихідними сигналами еталонної моделі 8 і виходом ланки літального апарата 15. У подальшому цей сигнал підсилюється у першому підсилювачі 10, возводиться в квадрат за допомогою квадратора 11, інтегрується першим інтегратором 12, тобто виробляється сигнал, пропорційній інтегральній середньоквадратичній похибці, який після обмеження по амплітуді першим обмежувачем 7 подається на другий вхід помножувача 6. Таким чином, на виході помножувача 6 виробляється сигнал управління з урахуванням зміни коефіцієнта передачі в контурі управління кутовою швидкістю II. Як показали дослідження, при зміні коефіцієнта передачі в контурі управління кутовою швидкістю II в 10 раз, показники якості t пп, σ, Аз, φз залишаються в допустимих межах згідно з технічним завданням. Отже, запропонована схема відповідає тим вимогам, що були поставлені. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 Система стабілізації літального апарата, яка містить контур самоналагоджування, до складу якого входять еталонна модель, вихід якої з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з виходом ланки літального апарата, квадратор, вихід якого 2 UA 103636 U 5 10 15 з'єднаний з входом першого інтегратора, обмежувач, вихід якого з'єднаний з другим входом помножувача контуру управління кутовою швидкістю, до складу якого входять третій суматор, помножувач, сервопривід, вихід якого з'єднаний з входом ланки літального апарата, вихід якої з'єднаний через датчик кутової швидкості з другим входом третього суматора; контур управління кутовим положенням, до складу якого входять задавач, вихід якого з'єднаний з першим входом четвертого суматора, другий вхід якого з'єднаний з виходом датчика кута, а його вихід з'єднаний з входом другого підсилювача, вихід якого з'єднаний з входом третього суматора, при цьому вхід датчика кута з'єднаний з виходом другого інтегратора, вхід якого з'єднаний з виходом ланки літального апарата, який відрізняється тим, що вихід першого суматора з'єднаний з входом першого підсилювача, вихід якого з'єднаний з входом квадратора, а вихід першого інтегратора з'єднаний з входом першого обмежувача контуру управління кутовою швидкістю, перший вхід помножувача з'єднаний з другим входом другого суматора, а вихід з'єднаний з першим входом другого суматора, вихід якого через другий підсилювач з'єднаний з входом сервопривода, окрім цього перший вхід помножувача з'єднаний з виходом другого обмежувача, вхід якого з'єднаний з виходом третього суматора, а також його вихід з'єднаний з входом еталонної моделі. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05D 13/00, B64C 13/00, G05D 1/00, B64C 13/18
Мітки: літального, система, апарата, стабілізації
Код посилання
<a href="https://ua.patents.su/5-103636-sistema-stabilizaci-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації літального апарата</a>
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Симонов Володимир Федорович, Бойко Євгенія Анатоліївна
МПК: G05D 1/03
Мітки: апарата, стабілізації, система, безпілотного, літального, відмовостійка, кутової
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової...
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Паніна Алла Володимирівна, Литвиненко Денис Володимирович, Симонов Володимир Федорович
МПК: G05D 1/03
Мітки: безпілотного, система, апарата, літального, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Адаптивна система кутової стабілізації безпілотного літального апарата
Номер патенту: 35826
Опубліковано: 10.10.2008
Автори: Амеліна Ірина Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: G05D 1/03, B64C 13/00
Мітки: система, адаптивна, безпілотного, кутової, апарата, літального, стабілізації
Формула / Реферат:
Адаптивна система кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки керування, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу,...
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 75971
Опубліковано: 25.12.2012
Автори: Субота Анатолій Максимович, Андрущенко Тетяна Миколаївна, Кулік Анатолій Степанович, Красножон Олександра Володимирівна
МПК: G05G 7/00
Мітки: відмовостійка, літального, апарата, система, безпілотного, стабілізації, кутової
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, суматори, регулятор, сервопривод, датчики кута тангажа і кутової швидкості, електронні ключі, індикатори відмови, диференціатор, інтегратор, яка відрізняється тим, що введено перший фільтр, вхід якого з'єднаний з першим входом датчика кута тангажа, вихід якого через диференціатор з'єднаний з першим входом другого електронного ключа,...
Система стабілізації безпілотного літального апарата на траєкторіях баражування
Номер патенту: 91812
Опубліковано: 10.07.2014
Автори: Чумаченко Сергій Миколайович, Шмаров Валерій Миколайович, Романченко Ігор Сергійович, Новіков Валерій Іванович, Тачиніна Олена Миколаївна, Лисенко Олександр Іванович, Семенченко Андрій Іванович, Кірчу Павло Іванович, Данилюк Сергій Леонідович, Валуйський Станіслав Вікторович
МПК: B64C 17/00, B64C 19/00
Мітки: система, траєкторіях, безпілотного, баражування, апарата, стабілізації, літального
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата на траєкторіях баражування, що містить задатчик, перший суматор, регулятор, об'єкт регулювання, інтегратор, другий суматор, причому вихід задатчика пов'язаний з підсумовуючим входом першого суматора, вихід якого підключений до входу регулятора, вихід регулятора з'єднаний з входом об'єкта регулювання і першим входом другого суматора, вихід об'єкта регулювання з'єднаний з другим входом...
Попередній патент: Формувач періодичної послідовності триімпульсних кодових серій з програмованою тривалістю паузи між імпульсами у серії
Наступний патент: Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Випадковий патент: Спосіб тренування без куль у стрільбі з пневматичної зброї