Система стабілізації безпілотного літального апарата на траєкторіях баражування
Номер патенту: 91812
Опубліковано: 10.07.2014
Автори: Лисенко Олександр Іванович, Чумаченко Сергій Миколайович, Шмаров Валерій Миколайович, Тачиніна Олена Миколаївна, Романченко Ігор Сергійович, Кірчу Павло Іванович, Семенченко Андрій Іванович, Валуйський Станіслав Вікторович, Новіков Валерій Іванович, Данилюк Сергій Леонідович

Формула / Реферат
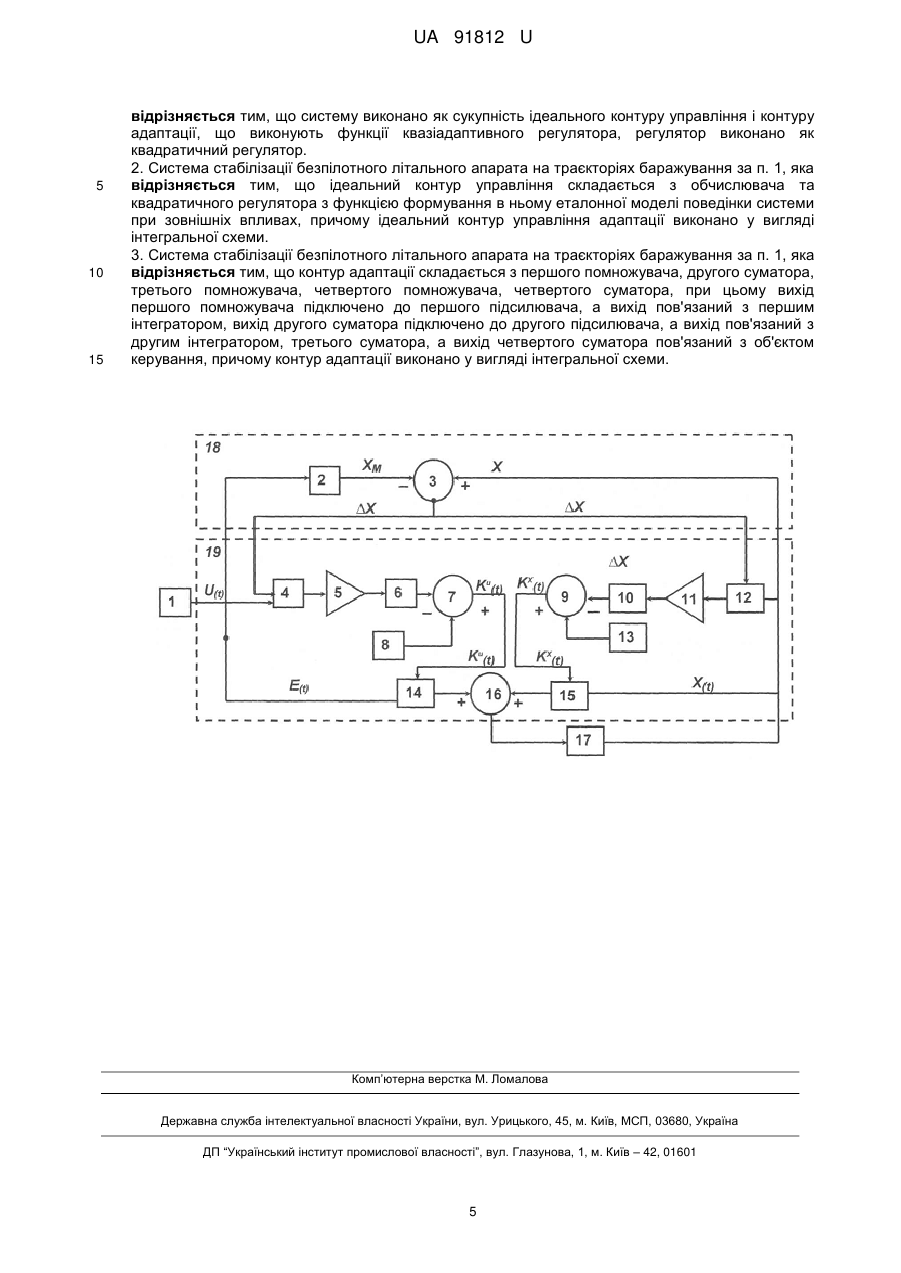
1. Система стабілізації безпілотного літального апарата на траєкторіях баражування, що містить задатчик, перший суматор, регулятор, об'єкт регулювання, інтегратор, другий суматор, причому вихід задатчика пов'язаний з підсумовуючим входом першого суматора, вихід якого підключений до входу регулятора, вихід регулятора з'єднаний з входом об'єкта регулювання і першим входом другого суматора, вихід об'єкта регулювання з'єднаний з другим входом першого суматора, вихід другого суматора з'єднаний з входом інтегратора, вихід якого з'єднаний з відповідним входом першого суматора і другим входом другого суматора, яка відрізняється тим, що систему виконано як сукупність ідеального контуру управління і контуру адаптації, що виконують функції квазіадаптивного регулятора, регулятор виконано як квадратичний регулятор.
2. Система стабілізації безпілотного літального апарата на траєкторіях баражування за п. 1, яка відрізняється тим, що ідеальний контур управління складається з обчислювача та квадратичного регулятора з функцією формування в ньому еталонної моделі поведінки системи при зовнішніх впливах, причому ідеальний контур управління адаптації виконано у вигляді інтегральної схеми.
3. Система стабілізації безпілотного літального апарата на траєкторіях баражування за п. 1, яка відрізняється тим, що контур адаптації складається з першого помножувача, другого суматора, третього помножувача, четвертого помножувача, четвертого суматора, при цьому вихід першого помножувача підключено до першого підсилювача, а вихід пов'язаний з першим інтегратором, вихід другого суматора підключено до другого підсилювача, а вихід пов'язаний з другим інтегратором, третього суматора, а вихід четвертого суматора пов'язаний з об'єктом керування, причому контур адаптації виконано у вигляді інтегральної схеми.
Текст
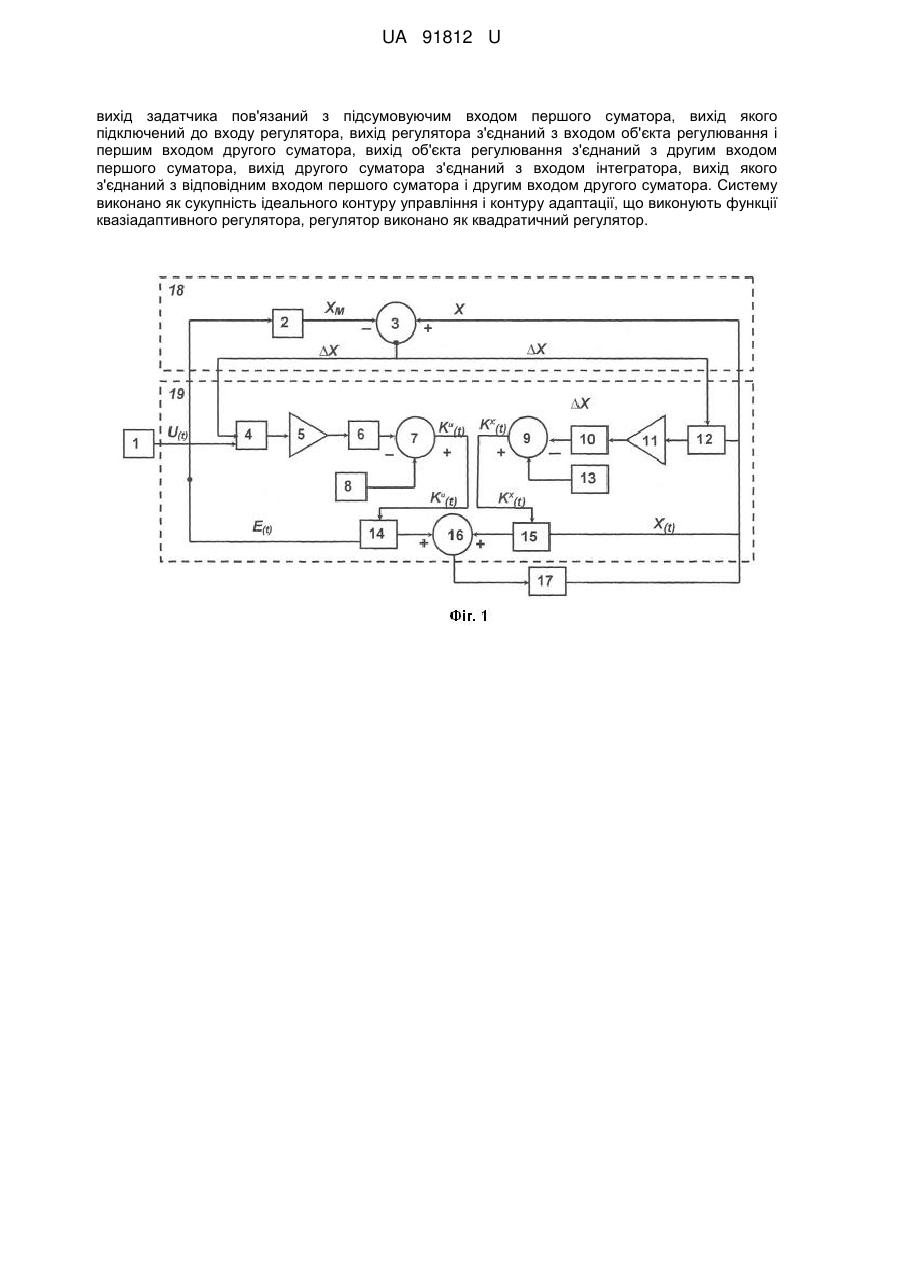
Реферат: Система стабілізації безпілотного літального апарата на траєкторіях баражування містить задатчик, перший суматор, регулятор, об'єкт регулювання, інтегратор, другий суматор, причому UA 91812 U (12) UA 91812 U вихід задатчика пов'язаний з підсумовуючим входом першого суматора, вихід якого підключений до входу регулятора, вихід регулятора з'єднаний з входом об'єкта регулювання і першим входом другого суматора, вихід об'єкта регулювання з'єднаний з другим входом першого суматора, вихід другого суматора з'єднаний з входом інтегратора, вихід якого з'єднаний з відповідним входом першого суматора і другим входом другого суматора. Систему виконано як сукупність ідеального контуру управління і контуру адаптації, що виконують функції квазіадаптивного регулятора, регулятор виконано як квадратичний регулятор. UA 91812 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі авіаційного приладобудування, зокрема до систем автоматичного обчислювання параметрів стабілізації (керування) польотом безпілотного літального апарата, і може бути використана в бортових системах автоматичного управління і регулювання польотів будь-якого із безпілотних літальних апаратів, у тому числі з екологічно чистими електричними двигунами, з реалізацією режимів координованих розворотів на траєкторіях баражування з метою забезпечення стійкого радіозв'язку, наприклад, з наземними рятувальними службами під час ліквідації наслідків екологічного лиха. Також система стабілізації може бути застосована під час польотів на безпілотних літальних апаратах у процесі здійснення заходів щодо контролю за утилізацією вибухових засобів, хімічних речовин тощо. Система автоматичного управління для астатичних об'єктів з запізненням, що містить перший інтегратор і послідовно з'єднані задатчик керуючого сигналу, перший суматор, регулятор, другий суматор, перший вхід якого підключений до виходу блока запізнювання, вихід регулятора через об'єкт регулювання з'єднаний з виходом системи автоматичного управління, другий інтегратор, вхід якого з'єднаний з виходом другого суматора, вихід регулятора через перший інтегратор сполучений з входом блока запізнювання і другим входом другого суматора, третій вхід якого підключений до виходу другого інтегратора, вихід системи автоматичного управління пов'язаний з другим входом першого суматора, третій вхід якого підключений до виходу другого інтегратора [1]. Недоліком цієї системи є її складність та недостатня відповідність функціональних можливостей сучасним вимогам. Під час функціонування системи її конструктивні елементи не забезпечують коректні змінювання сигналів управління у разі виникнення помилок регулювання за умов постійних впливів ззовні будь-яких частот та розмірів. Найбільш близькою системою як за суттю, так і за завданнями, що вирішуються, який вибраний за найближчий аналог (прототип), є система автоматичного управління для астатичних об'єктів з запізненням, містить задатчик, перший суматор, регулятор, об'єкт регулювання, інтегратор, другий суматор, причому вихід задатчика пов'язаний з підсумовуючим входом першого суматора, вихід якого підключений до входу регулятора, вихід регулятора з'єднаний з входом об'єкта регулювання і першим входом другого суматора, вихід об'єкта регулювання з'єднаний з другим входом першого суматора, вихід другого суматора з'єднаний з входом інтегратора, вихід якого з'єднаний з відповідним входом першого суматора і другим входом другого суматора [2]. Недоліком цієї системи є те, що у разі зміни параметрів управління може відбутися значне погіршення якості її функціонування, система втратить стійкість управління. Система має збільшений час адаптації до зовнішніх збурень, спричинених природними чинниками, а також збільшене значення помилки вихідного сигналу. Під час функціонування конструктивні елементи системи не враховують ефект старіння попередньої інформації. В основу корисної моделі поставлено задачу за рахунок змінювання конструкції прототипу, введення додаткових конструктивних складових елементів та застосування спеціальних технічних засобів створити систему стабілізації безпілотного літального апарата на траєкторіях баражування, яка б забезпечувала коректне квазіадаптивне обчислення параметрів стабілізації польоту, стійкість автоматичної системи управління безпілотного літального апарата, скорочення часу перехідних процесів, час її адаптації до збурень, зменшення середнього значення помилки стабілізації координат руху від датчиків стану безпілотного літального апарата (підвищену точність сигналів управління) за весь час стабілізаційного процесу в агресивних для людини умовах та в умовах впливу негативних природних чинників і, як наслідок, зменшення енергозатрат в процесі керування польотом безпілотного літального апарата. Поставлена задача вирішується тим, що систему стабілізації безпілотного літального апарата на траєкторіях баражування, що містить задатчик, перший суматор, регулятор, об'єкт регулювання, інтегратор, другий суматор, причому вихід задатчика пов'язаний з підсумовуючим входом першого суматора, вихід якого підключений до входу регулятора, вихід регулятора з'єднаний з входом об'єкта регулювання і першим входом другого суматора, вихід об'єкта регулювання з'єднаний з другим входом першого суматора, вихід другого суматора з'єднаний з входом інтегратора, вихід якого з'єднаний з відповідним входом першого суматора і другим входом другого суматора, згідно з корисною моделлю, виконано як сукупність ідеального контуру управління і контуру адаптації, що виконують функції квазіадаптивного регулятора, регулятор виконано як квадратичний регулятор. Ідеальний контур управління складається з квадратичного регулятора з функцією формування в ньому еталонної моделі поведінки системи при зовнішніх впливах, причому ідеальний контур управління адаптації виконано у вигляді 1 UA 91812 U 5 10 15 20 25 30 35 40 45 50 55 60 інтегральної схеми. Контур адаптації складається з першого помножувача на вхід якого надходять сигнали від задатчика та першого суматора, а вихід якого підключено до першого підсилювача, вихід якого пов'язаний з першим інтегратором, другого суматора на входи якого надходять сигнали від першого інтегратора та першого блока задавання коефіцієнтів, з другого помножувача на вхід якого надходять сигнали від об'єкта керування та першого суматора, а вихід якого підключено до другого підсилювача вихід якого пов'язаний з другим інтегратором, третього суматора на вхід якого надходять сигнали від другого інтегратора та другого блока задавання коефіцієнтів, третього помножувача на вхід якого надходять сигнали від задатчика та другого суматора, четвертого помножувача на вхід якого надходять сигнали від об'єкта керування та третього суматора, четвертого суматора на вхід якого надходять сигнали з третього та четвертого помножувача, а вихід пов'язаний з об'єктом керування, причому контур адаптації виконано у вигляді інтегральної схеми. Система стабілізації безпілотного літального апарата на траєкторіях баражування має двоконтурну побудову з ідеальним контуром управління і контуром адаптації. Виконання системи стабілізації безпілотного літального апарата на траєкторіях баражування, яка відіграє роль квазіадаптивного регулятора, забезпечує стійкість адаптації системи, найменший час її адаптації до збурень, зменшення середнього значення помилки стабілізації координат руху безпілотного літального апарата за весь час стабілізаційного процесу. Оснащення ідеального контуру управління квадратичним регулятором забезпечує виконання функції формування в ньому еталонної моделі поведінки системи при зовнішніх впливах під час польотів в умовах негативних природних чинників. Контур адаптації з помножувачами, інтеграторами, підсилювачами забезпечує стійкість адаптації системи, скорочує час її адаптації до збурень, які виникають внаслідок природних чинників, зменшує середнє значення помилки стабілізації координат руху безпілотного літального апарата за час стабілізаційного процесу. Автоматичне обчислення сигналів під час керованого польоту з використанням помножувачів, інтеграторів, підсилювачів із змінними в часі коефіцієнтами підсилення, забезпечує зменшення впливу на процес регулювання збурень та ефекту старіння попередньої інформації, скорочення часу адаптації квазіадаптивного регулятора до збурень, які виникають внаслідок природних чинників. Виконання ідеального контуру управління і контуру адаптації у вигляді інтегральної схеми забезпечує компактне їх розміщення у системі, яка відіграє роль квазіадаптивного регулятора. Конструкція системи (квазіадаптивного регулятора) забезпечує можливість їх обслуговування та швидкої заміни у разі виходу з ладу. Суть побудови та функціонування системи стабілізації безпілотного літального апарата на траєкторіях баражування (квазіадаптивного регулятора) пояснюється ілюстрацією на кресл. Система стабілізації безпілотного літального апарата на траєкторіях баражування (квазіадаптивний регулятор) складається та готується до функціонування наступним чином (див. кресл.): з задатчика 1, вихід якого пов'язаний з входом квадратичного регулятора 2, першого суматора 3, вихід якого підключено до входів першого помножувача 4 та другого помножувача 12, першого підсилювача 5, вихід якого підключено до входу першого інтегратора 6, другого суматора 7, до входу якого підключено вихід першого інтегратора 6 та вихід першого блока задавання коефіцієнтів 8, третього помножувача 14, до входу якого підключено виходи другого суматора 7 та задатчика 1, другого підсилювача 11, на вхід якого підключено вихід другого помножувача 12, а вихід підсилювача з'єднаний з входом другого інтегратора 10, третього суматора 9, до входу якого підключено вихід другого інтегратора 10 та вихід другого блока задавання коефіцієнтів 13, четвертого помножувача 15, до входу якого підключено виходи третього суматора 9 та об'єкту керування 17, четвертого суматора 16, до входу якого підключено вихід третього помножувача 14 та вихід четвертого помножувача 15, а вихід четвертого суматора підключено до входу об'єкту керування 17. Таким чином, складові елементи, позначені як позиції 2 і 3, конструктивно розміщені у складі ідеального контуру управління 18, а складові елементи, позначені як позиції 4-17, конструктивно розміщені у складі контур адаптації 19. Система стабілізації безпілотного літального апарата на траєкторіях баражування функціонує наступним чином. Таким чином (див. кресл.), ідеальний контур управління 18 і контур адаптації 19 утворюють систему стабілізації безпілотного літального апарата на траєкторіях баражування (квазіадаптивний регулятор). Під час польоту безпілотного літального апарата вихідний сигнал U( t ) = U задатчика 1 подається на вхід обчислювального модуля квадратичного регулятора 2, що входить до складу 2 UA 91812 U 5 ідеального контуру управління, в якому автоматично обчислюється математична модель зміни в часі помилки стеження ΔX та розузгодження із заданою траєкторією ΔX(t ) = X(t ) XM (t ) та забезпечується автоматичне формування та передавання управляючих сигналів в контур адаптації через помножувачі 4, 12, підсилювачі 5, 11, інтегратори 7, 10, блок задавання коефіцієнтів 14, 15 на об'єкт управління 17 (див. кресл.). Процес керування безпілотним літальним апаратом 17 описується рівнянням стану: X( t ) = AX( t ) + B A( t ) + η( t ) ; Y = CX (t ) + ξ(t ) , 10 15 де X ∈Rn - вектор стану безпілотного літального апарата; E ∈Rn вектор керування; Y вектор вимірювань A( t ) , B( t ) - n × n і n × m матриці параметрів безпілотного літального апарата; η та ξ - вектор шумів збурень та шумів вимірювання. Бажана динаміка польоту об'єкта керування 17 (безпілотного літального апарата) з урахуванням вимог, які пред'являються до системи: найменший час адаптації, швидше налаштування системи стабілізації безпілотного літального апарата на траєкторіях баражування (квазіадаптивного регулятора), найменше середнє значення помилки вихідного сигналу безпілотного літального апарата за весь час стабілізаційного процесу і в наслідок чого найменші енергозатрати в процесі керування - задається за допомогою еталонної моделі: XM = A M XM ( t ) + BMU( t ) , 20 25 t →∞ 35 (3) де ΔX(t ) = X(t ) XM (t ) - помилки стеження та розузгодження із заданою траєкторією (2) і (3). Ціль адаптивного керування (3) розв'язується за рахунок функціонування системи стабілізації безпілотного літального апарата на траєкторіях баражування (квазіадаптивного регулятора). Система стабілізації безпілотного літального апарата на траєкторіях баражування (квазіадаптивний регулятор) здійснює процедуру синтезу алгоритму обчислення ідеальних коефіцієнтів 7, 12 за рахунок використання функцій Ляпунова. Один із ідеальних сигналів керування 14 з мінімальним середнім значенням помилки вихідного сигналу безпілотного літального апарата за весь час стабілізаційного процесу описується так: U E( t ) = K Ix X( t ) + K I X( t ) , 40 (2) де XM ∈R n - вектор стану еталонної моделі, U∈Rm вектор вхідних дій, AM , BM , - матриці відповідних розмірностей. Оптимальне значення показника якості функціонування системи автоматичного керування безпілотного літального апарата, а саме зменшення середнього значення помилки вихідного сигналу безпілотного літального апарата за весь час стабілізаційного процесу, задається як формалізована ціль адаптивного керування: lim ΔX(t ) = 0 , 30 (1) (4) U де K Ix , K I - ідеальні коефіцієнти системи стабілізації безпілотного літального апарата на траєкторіях баражування (квазіадаптивного регулятора), які задовольняють рівнянням: BK Ix = A M A, U BK I = BM . (5) (6) На основі ідеального закону управління будується реальний закон управління: E( t ) = K x ( t )X( t ) + K U ( t )X( t ) . (7) 45 3 UA 91812 U З використанням функції Ляпунова знаходимо змінні у часі реальні коефіцієнти, які забезпечать досягнення мети управління: K x (t) = λ 10 (8) K U ( t ) = β ΔX( t ) U( t ) . 5 ΔX( t ) X( t ) , (9) Технічний результат досягається за рахунок змінювання протягом часу коефіцієнта λ (8) першого підсилювача 5 та коефіцієнта β (9) другого підсилювача 11, що забезпечує зменшення впливу попередньо отриманих даних на процес регулювання, тобто, враховують так званий ефект старіння попередньої інформації, за рахунок чого зменшується час адаптації, збільшується швидкість налаштування системи стабілізації безпілотного літального апарата на траєкторіях баражування (квазіадаптивного регулятора), зменшується середнє значення помилки вихідного сигналу стабілізації від датчиків стану безпілотного літального апарата за весь час стабілізаційного процесу і в наслідок чого зменшується енергозатрати у процесі керування: λ( t ) = x1(1 e qt o ) + x 2 (1 e 2qt o ) + ... + x n (1 e nqt o ) β( t ) = u1(1 e qt o ) + u 2 (1 e 2qt o ) + ... + un (1 e nqt o ) , (10) 15 20 25 30 35 40 де q - коефіцієнт темпу старіння інформації, що підбирається емпірично залежно від умов функціонування об'єкту керування. Суттєвою особливістю функціонування системи стабілізації безпілотного літального апарата на траєкторіях баражування (квазіадаптивного регулятора) є те, що коефіцієнти темпу старіння інформації q (10) для формування сигналів управління з першого підсилювача 5 та другого підсилювача 11 підбираються емпірично залежно від умов функціонування об'єкту керування 17 (органів керування безпілотного літального апарата), що забезпечує значне зменшення часу адаптації системи. Будова системи стабілізації безпілотного літального апарата на траєкторіях баражування (квазіадаптивного регулятора) може бути адаптована до будь-яких конструкцій безпілотних літальних апаратів, а під час функціонування система (квазіадаптивний регулятор) у найкоротший час адаптується до збурень, які виникають внаслідок природних чинників, забезпечує скорочення часу його налаштування для польотів в умовах негативних природних чинників, зменшення середнього значення помилки (підвищення точності сигналів управління) вихідного сигналу від датчиків стану безпілотного літального апарата за весь час стабілізаційного польоту і, як наслідок, зменшення енергозатрат в процесі керування польотом та знижує негативний вплив безпілотного літального апарата на навколишнє природне середовище (повітря). Джерела інформації: 1. Авторское свидетельство СССР 1631515. Система автоматического управления для астатических объектов с запаздыванием. МПК: G 05 В 11/01. Авторы патента: Кравченко Ирина Искандеровна, Еремин Евгений Леонидович Горбина Наталья Николаевна. Вледельцы патента: Кравченко Ирина Искандеровна Еремин Евгений Леонидович Горбина Наталья Николаевна. 1991 - аналог. 2. Патент Российской Федерации № 2192030. Система автоматического управления для астатических объектов с запаздыванием. МПК: G05B11/00. Авторы: Акилова И.М., Еремин Е.Л., Самохвалова С.Г. Патентообладатель: Амурский государственный университет. Публикация патента: 27.10.2002 г., G05B11/00. - прототип. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 1. Система стабілізації безпілотного літального апарата на траєкторіях баражування, що містить задатчик, перший суматор, регулятор, об'єкт регулювання, інтегратор, другий суматор, причому вихід задатчика пов'язаний з підсумовуючим входом першого суматора, вихід якого підключений до входу регулятора, вихід регулятора з'єднаний з входом об'єкта регулювання і першим входом другого суматора, вихід об'єкта регулювання з'єднаний з другим входом першого суматора, вихід другого суматора з'єднаний з входом інтегратора, вихід якого з'єднаний з відповідним входом першого суматора і другим входом другого суматора, яка 4 UA 91812 U 5 10 15 відрізняється тим, що систему виконано як сукупність ідеального контуру управління і контуру адаптації, що виконують функції квазіадаптивного регулятора, регулятор виконано як квадратичний регулятор. 2. Система стабілізації безпілотного літального апарата на траєкторіях баражування за п. 1, яка відрізняється тим, що ідеальний контур управління складається з обчислювача та квадратичного регулятора з функцією формування в ньому еталонної моделі поведінки системи при зовнішніх впливах, причому ідеальний контур управління адаптації виконано у вигляді інтегральної схеми. 3. Система стабілізації безпілотного літального апарата на траєкторіях баражування за п. 1, яка відрізняється тим, що контур адаптації складається з першого помножувача, другого суматора, третього помножувача, четвертого помножувача, четвертого суматора, при цьому вихід першого помножувача підключено до першого підсилювача, а вихід пов'язаний з першим інтегратором, вихід другого суматора підключено до другого підсилювача, а вихід пов'язаний з другим інтегратором, третього суматора, а вихід четвертого суматора пов'язаний з об'єктом керування, причому контур адаптації виконано у вигляді інтегральної схеми. Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюRomanchenko Ihor Serhiiovych, Lysenko Oleksandr Ivanovych, Chumachenko Serhii Mykolaiovych
Автори російськоюРоманченко Игорь Сергеевич, Лысенко Александр Иванович, Чумаченко Сергей Николаевич
МПК / Мітки
МПК: B64C 19/00, B64C 17/00
Мітки: апарата, стабілізації, система, літального, баражування, безпілотного, траєкторіях
Код посилання
<a href="https://ua.patents.su/7-91812-sistema-stabilizaci-bezpilotnogo-litalnogo-aparata-na-traehktoriyakh-barazhuvannya.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації безпілотного літального апарата на траєкторіях баражування</a>
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Симонов Володимир Федорович, Бойко Євгенія Анатоліївна
МПК: G05D 1/03
Мітки: кутової, літального, безпілотного, стабілізації, система, відмовостійка, апарата
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової...
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 75971
Опубліковано: 25.12.2012
Автори: Красножон Олександра Володимирівна, Кулік Анатолій Степанович, Субота Анатолій Максимович, Андрущенко Тетяна Миколаївна
МПК: G05G 7/00
Мітки: кутової, безпілотного, літального, система, відмовостійка, апарата, стабілізації
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, суматори, регулятор, сервопривод, датчики кута тангажа і кутової швидкості, електронні ключі, індикатори відмови, диференціатор, інтегратор, яка відрізняється тим, що введено перший фільтр, вхід якого з'єднаний з першим входом датчика кута тангажа, вихід якого через диференціатор з'єднаний з першим входом другого електронного ключа,...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Величко Надія Вікторівна
МПК: G05D 1/03, B64C 13/00
Мітки: безпілотного, стабілізації, система, літального, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Адаптивна система кутової стабілізації безпілотного літального апарата
Номер патенту: 35826
Опубліковано: 10.10.2008
Автори: Амеліна Ірина Вікторівна, Симонов Володимир Федорович, Бандура Іван Миколайович
МПК: B64C 13/00, G05D 1/03
Мітки: літального, система, адаптивна, кутової, апарата, стабілізації, безпілотного
Формула / Реферат:
Адаптивна система кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки керування, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу,...
Система стабілізації безпілотного літального апарата
Номер патенту: 65285
Опубліковано: 25.11.2011
Автори: Субота Анатолій Максимович, Льовкін Сергій Генадійович, Кописов Олег Едуардович
МПК: B64C 13/00
Мітки: апарата, стабілізації, система, безпілотного, літального
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить послідовно з'єднані обчислювач, підсилювач, рульову машину, орган управління та датчик кута, датчик кутової швидкості, яка відрізняється тим, що містить задатчик, вихід якого з'єднаний з входом обчислювача, вихід рульової машини одночасно з'єднаний з входом органа управління і через перший перетворювач з'єднаний з входом адаптивного контура, а вихід органа управління з'єднаний...
Попередній патент: Спосіб рекламування товарів і послуг на транспортному засобі
Наступний патент: Центратор
Випадковий патент: Спосіб одержання сонячного елемента, застосування тетрахлориду кремнію у ньому та тонкоплівковий сонячний елемент одержаний цим способом