Адаптивна система кутової стабілізації безпілотного літального апарата
Номер патенту: 35826
Опубліковано: 10.10.2008
Автори: Амеліна Ірина Вікторівна, Симонов Володимир Федорович, Бандура Іван Миколайович
Формула / Реферат
Адаптивна система кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки керування, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу, третій суматор та другий електронний ключ, яка відрізняється тим, що до її складу введені другий фільтр, вхід якого з'єднаний з виходом датчика кута, а вихід - з входом блока диференціювання та з першим входом другого блока множення сигналів, блок диференціювання, вихід якого з'єднаний з першим входом першого блока множення сигналів, перший блок множення сигналів, вихід якого з'єднаний з входом першого погоджувального інтегратора з настроюваними параметрами, перший погоджувальний інтегратор з настроюваними параметрами, вихід якого з'єднаний з першим входом четвертого суматора, блок знаменника моделі еталонної поведінки системи, вхід якого з'єднаний з виходом датчика кута, а вихід - з першим входом другого порівнювального пристрою, другий порівнювальний пристрій, вихід якого з'єднаний з другим входом другого блока множення сигналів та другим входом першого блока множення сигналів, другий блок множення сигналів, вихід якого з'єднаний з входом другого погоджувального інтегратора з настроюваними параметрами, вихід якого з'єднаний з другим входом четвертого суматора, четвертий суматор, третій вхід якого з'єднаний з другим входом другого порівнювального пристрою, а вихід - з другим входом третього електронного ключа, третій електронний ключ, перший вхід якого з'єднаний з виходом блока чисельника моделі еталонної поведінки системи, а вихід - з входом першого порівнювального пристрою.
Текст
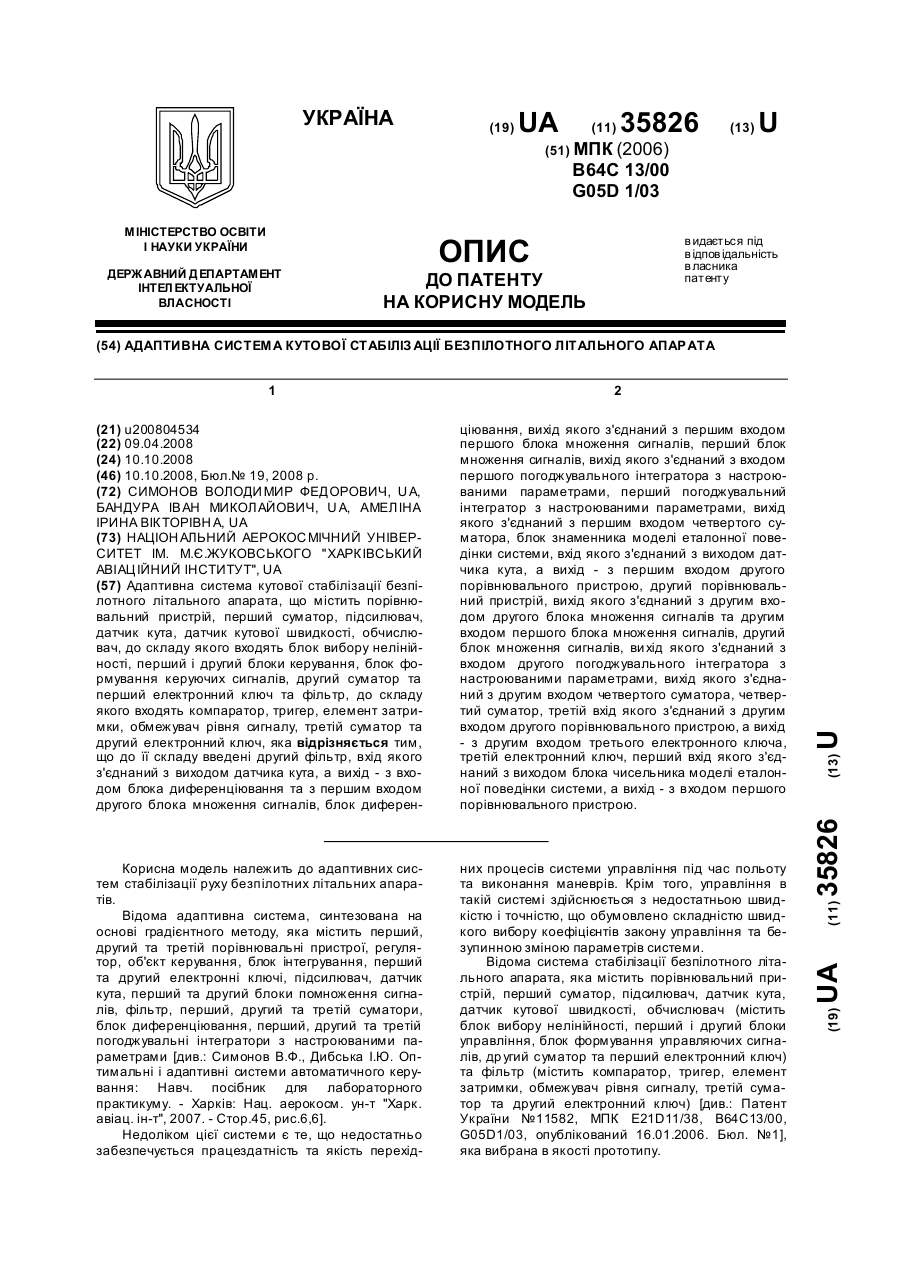
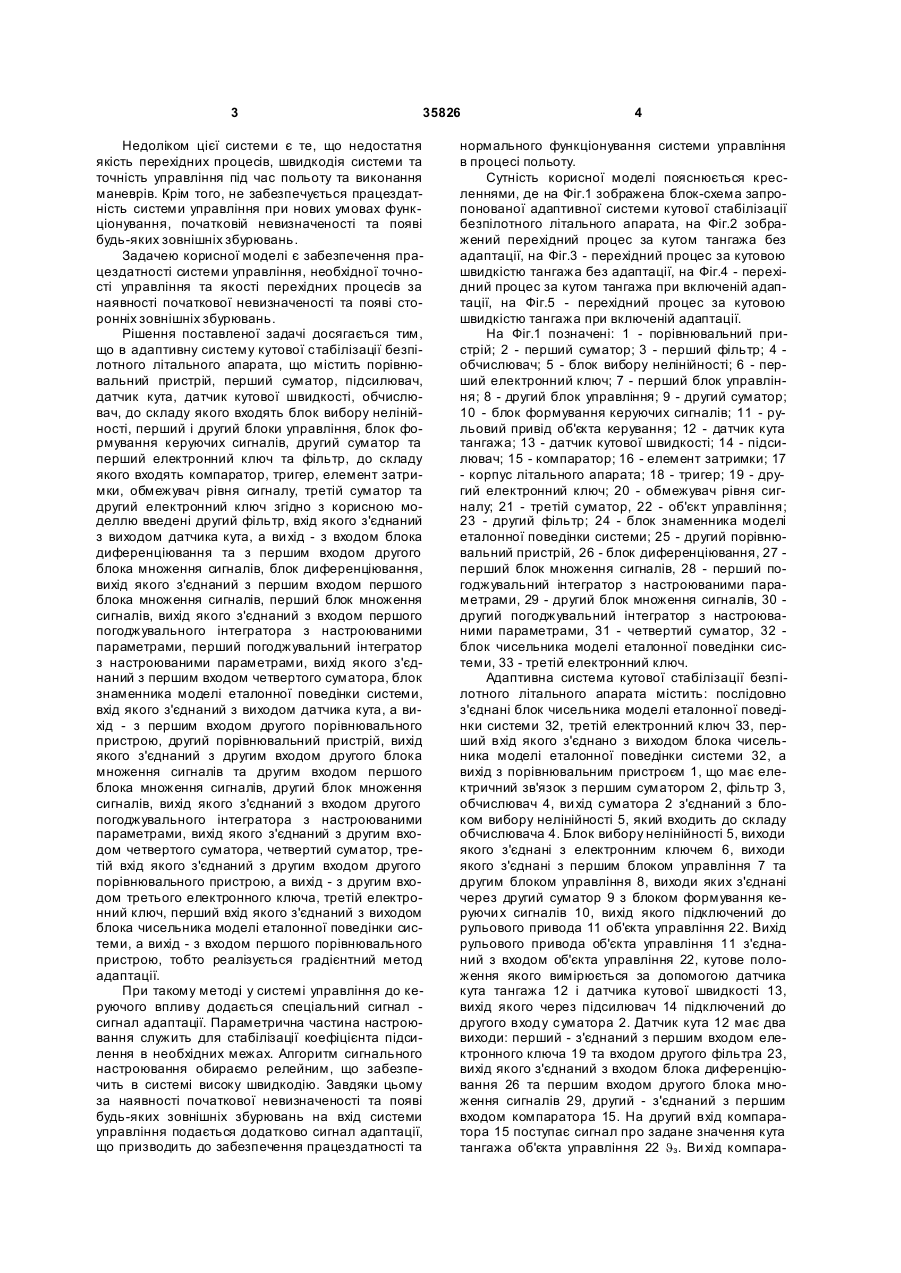
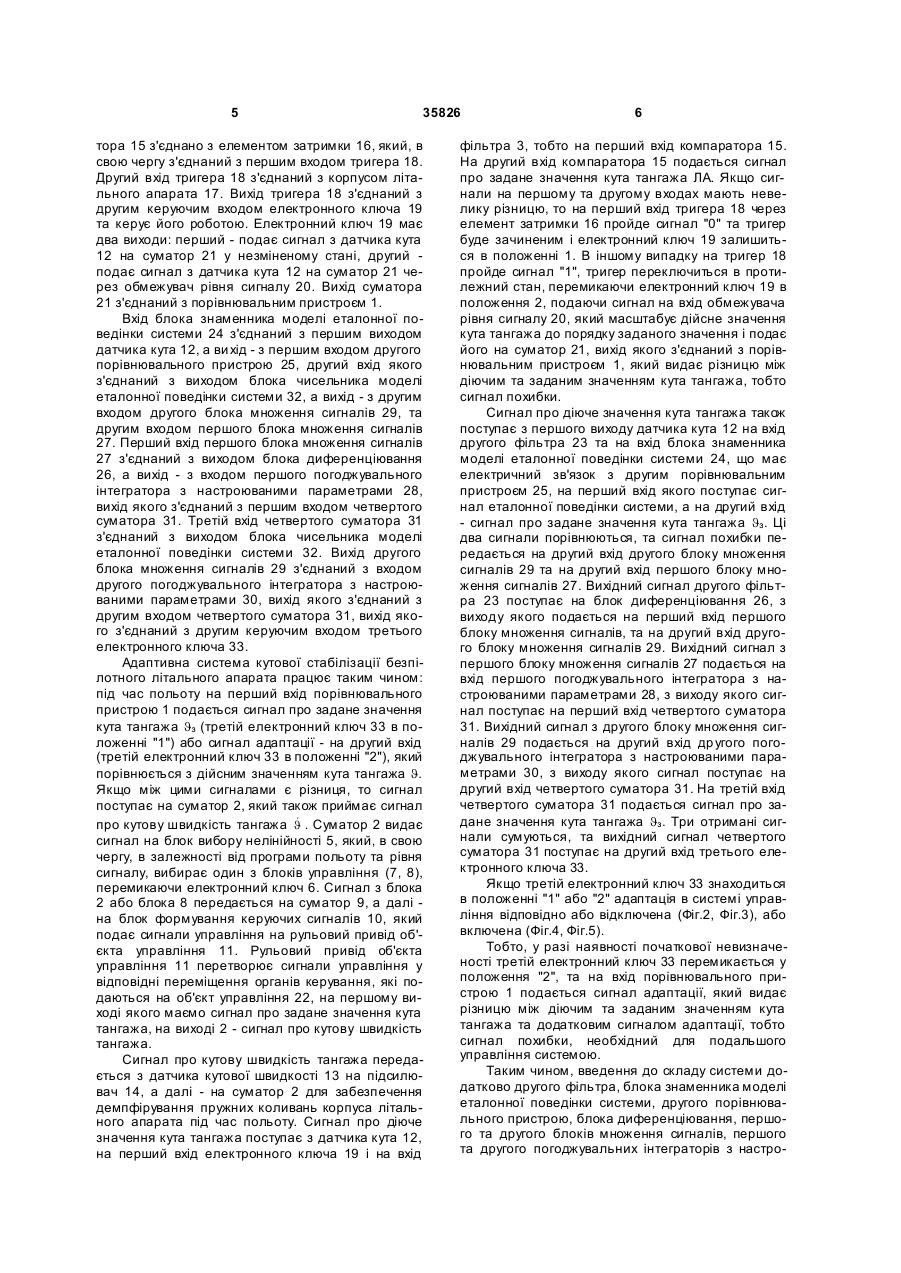
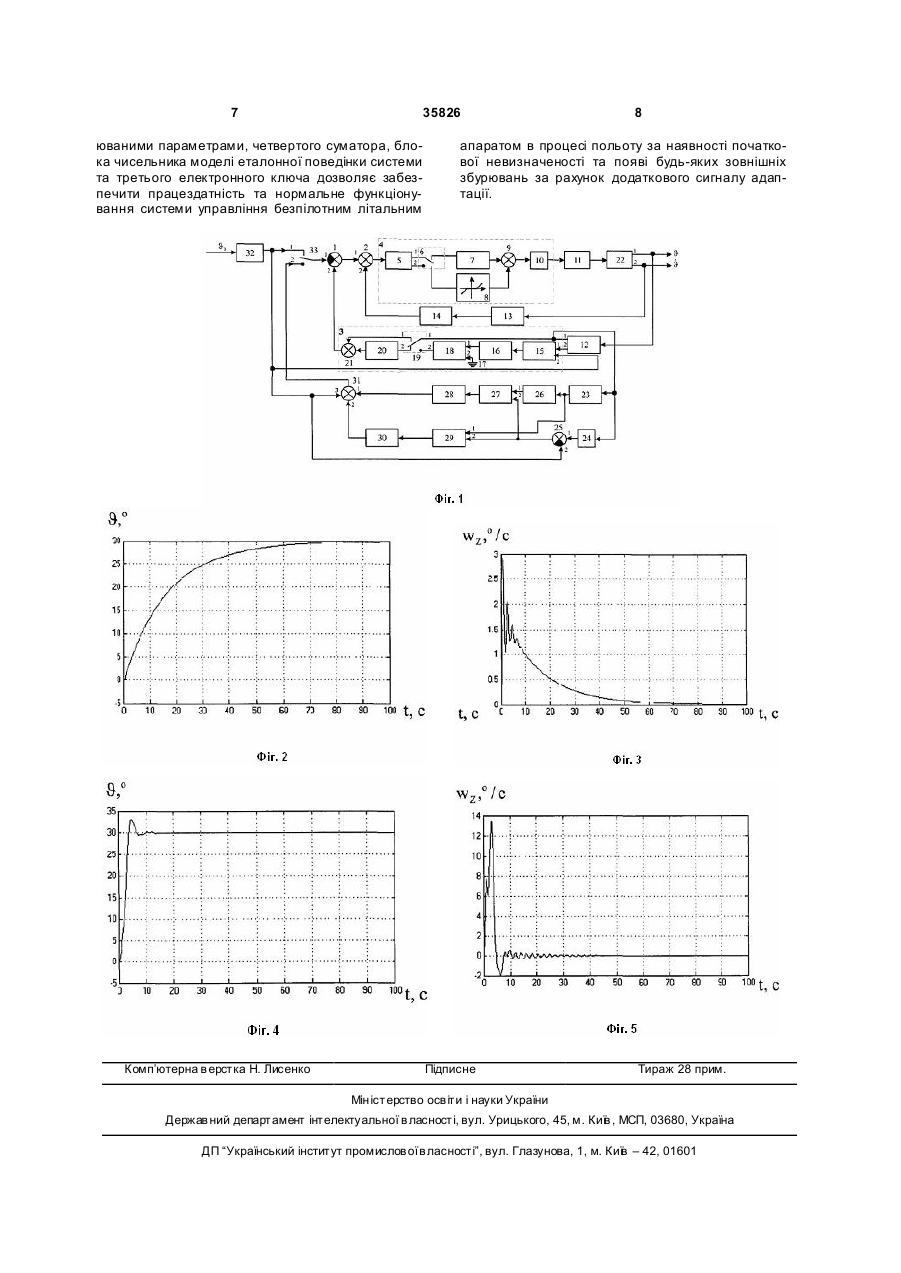
Адаптивна система кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки керування, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу, третій суматор та другий електронний ключ, яка відрізняється тим, що до її складу введені другий фільтр, вхід якого з'єднаний з виходом датчика кута, а вихід - з входом блока диференціювання та з першим входом другого блока множення сигналів, блок диферен U 2 (19) 1 3 35826 Недоліком цієї системи є те, що недостатня якість перехідних процесів, швидкодія системи та точність управління під час польоту та виконання маневрів. Крім того, не забезпечується працездатність системи управління при нових умовах функціонування, початковій невизначеності та появі будь-яких зовнішніх збурювань. Задачею корисної моделі є забезпечення працездатності системи управління, необхідної точності управління та якості перехідних процесів за наявності початкової невизначеності та появі сторонніх зовнішніх збурювань. Рішення поставленої задачі досягається тим, що в адаптивну систему кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки управління, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу, третій суматор та другий електронний ключ згідно з корисною моделлю введені другий фільтр, вхід якого з'єднаний з виходом датчика кута, а ви хід - з входом блока диференціювання та з першим входом другого блока множення сигналів, блок диференціювання, вихід якого з'єднаний з першим входом першого блока множення сигналів, перший блок множення сигналів, вихід якого з'єднаний з входом першого погоджувального інтегратора з настроюваними параметрами, перший погоджувальний інтегратор з настроюваними параметрами, вихід якого з'єднаний з першим входом четвертого суматора, блок знаменника моделі еталонної поведінки системи, вхід якого з'єднаний з виходом датчика кута, а вихід - з першим входом другого порівнювального пристрою, другий порівнювальний пристрій, вихід якого з'єднаний з другим входом другого блока множення сигналів та другим входом першого блока множення сигналів, другий блок множення сигналів, вихід якого з'єднаний з входом другого погоджувального інтегратора з настроюваними параметрами, вихід якого з'єднаний з другим входом четвертого суматора, четвертий суматор, третій вхід якого з'єднаний з другим входом другого порівнювального пристрою, а вихід - з другим входом третього електронного ключа, третій електронний ключ, перший вхід якого з'єднаний з виходом блока чисельника моделі еталонної поведінки системи, а вихід - з входом першого порівнювального пристрою, тобто реалізується градієнтний метод адаптації. При такому методі у системі управління до керуючого впливу додається спеціальний сигнал сигнал адаптації. Параметрична частина настроювання служить для стабілізації коефіцієнта підсилення в необхідних межах. Алгоритм сигнального настроювання обираємо релейним, що забезпечить в системі високу швидкодію. Завдяки цьому за наявності початкової невизначеності та появі будь-яких зовнішніх збурювань на вхід системи управління подається додатково сигнал адаптації, що призводить до забезпечення працездатності та 4 нормального функціонування системи управління в процесі польоту. Сутність корисної моделі пояснюється кресленнями, де на Фіг.1 зображена блок-схема запропонованої адаптивної системи кутової стабілізації безпілотного літального апарата, на Фіг.2 зображений перехідний процес за кутом тангажа без адаптації, на Фіг.3 - перехідний процес за кутовою швидкістю тангажа без адаптації, на Фіг.4 - перехідний процес за кутом тангажа при включеній адаптації, на Фіг.5 - перехідний процес за кутовою швидкістю тангажа при включеній адаптації. На Фіг.1 позначені: 1 - порівнювальний пристрій; 2 - перший суматор; 3 - перший фільтр; 4 обчислювач; 5 - блок вибору нелінійності; 6 - перший електронний ключ; 7 - перший блок управління; 8 - другий блок управління; 9 - другий суматор; 10 - блок формування керуючих сигналів; 11 - рульовий привід об'єкта керування; 12 - датчик кута тангажа; 13 - датчик кутової швидкості; 14 - підсилювач; 15 - компаратор; 16 - елемент затримки; 17 - корпус літального апарата; 18 - тригер; 19 - другий електронний ключ; 20 - обмежувач рівня сигналу; 21 - третій суматор, 22 - об'єкт управління; 23 - другий фільтр; 24 - блок знаменника моделі еталонної поведінки системи; 25 - другий порівнювальний пристрій, 26 - блок диференціювання, 27 перший блок множення сигналів, 28 - перший погоджувальний інтегратор з настроюваними параметрами, 29 - другий блок множення сигналів, 30 другий погоджувальний інтегратор з настроюваними параметрами, 31 - четвертий суматор, 32 блок чисельника моделі еталонної поведінки системи, 33 - третій електронний ключ. Адаптивна система кутової стабілізації безпілотного літального апарата містить: послідовно з'єднані блок чисельника моделі еталонної поведінки системи 32, третій електронний ключ 33, перший вхід якого з'єднано з виходом блока чисельника моделі еталонної поведінки системи 32, а вихід з порівнювальним пристроєм 1, що має електричний зв'язок з першим суматором 2, фільтр 3, обчислювач 4, ви хід суматора 2 з'єднаний з блоком вибору нелінійності 5, який входить до складу обчислювача 4. Блок вибору нелінійності 5, виходи якого з'єднані з електронним ключем 6, виходи якого з'єднані з першим блоком управління 7 та другим блоком управління 8, виходи яких з'єднані через другий суматор 9 з блоком формування керуючи х сигналів 10, вихід якого підключений до рульового привода 11 об'єкта управління 22. Вихід рульового привода об'єкта управління 11 з'єднаний з входом об'єкта управління 22, кутове положення якого вимірюється за допомогою датчика кута тангажа 12 і датчика кутової швидкості 13, вихід якого через підсилювач 14 підключений до другого входу суматора 2. Датчик кута 12 має два виходи: перший - з'єднаний з першим входом електронного ключа 19 та входом другого фільтра 23, вихід якого з'єднаний з входом блока диференціювання 26 та першим входом другого блока множення сигналів 29, другий - з'єднаний з першим входом компаратора 15. На другий вхід компаратора 15 поступає сигнал про задане значення кута тангажа об'єкта управління 22 Jз. Ви хід компара 5 35826 тора 15 з'єднано з елементом затримки 16, який, в свою чергу з'єднаний з першим входом тригера 18. Другий вхід тригера 18 з'єднаний з корпусом літального апарата 17. Вихід тригера 18 з'єднаний з другим керуючим входом електронного ключа 19 та керує його роботою. Електронний ключ 19 має два виходи: перший - подає сигнал з датчика кута 12 на суматор 21 у незміненому стані, другий подає сигнал з датчика кута 12 на суматор 21 через обмежувач рівня сигналу 20. Вихід суматора 21 з'єднаний з порівнювальним пристроєм 1. Вхід блока знаменника моделі еталонної поведінки системи 24 з'єднаний з першим виходом датчика кута 12, а ви хід - з першим входом другого порівнювального пристрою 25, другий вхід якого з'єднаний з виходом блока чисельника моделі еталонної поведінки системи 32, а вихід - з другим входом другого блока множення сигналів 29, та другим входом першого блока множення сигналів 27. Перший вхід першого блока множення сигналів 27 з'єднаний з виходом блока диференціювання 26, а вихід - з входом першого погоджувального інтегратора з настроюваними параметрами 28, вихід якого з'єднаний з першим входом четвертого суматора 31. Третій вхід четвертого суматора 31 з'єднаний з виходом блока чисельника моделі еталонної поведінки системи 32. Вихід другого блока множення сигналів 29 з'єднаний з входом другого погоджувального інтегратора з настроюваними параметрами 30, вихід якого з'єднаний з другим входом четвертого суматора 31, вихід якого з'єднаний з другим керуючим входом третього електронного ключа 33. Адаптивна система кутової стабілізації безпілотного літального апарата працює таким чином: під час польоту на перший вхід порівнювального пристрою 1 подається сигнал про задане значення кута тангажа Jз (третій електронний ключ 33 в положенні "1") або сигнал адаптації - на другий вхід (третій електронний ключ 33 в положенні "2"), який порівнюється з дійсним значенням кута тангажа J. Якщо між цими сигналами є різниця, то сигнал поступає на суматор 2, який також приймає сигнал & про кутову швидкість тангажа J . Суматор 2 видає сигнал на блок вибору нелінійності 5, який, в свою чергу, в залежності від програми польоту та рівня сигналу, вибирає один з блоків управління (7, 8), перемикаючи електронний ключ 6. Сигнал з блока 2 або блока 8 передається на суматор 9, а далі на блок формування керуючих сигналів 10, який подає сигнали управління на рульовий привід об'єкта управління 11. Рульовий привід об'єкта управління 11 перетворює сигнали управління у відповідні переміщення органів керування, які подаються на об'єкт управління 22, на першому виході якого маємо сигнал про задане значення кута тангажа, на виході 2 - сигнал про кутову швидкість тангажа. Сигнал про кутову швидкість тангажа передається з датчика кутової швидкості 13 на підсилювач 14, а далі - на суматор 2 для забезпечення демпфірування пружних коливань корпуса літального апарата під час польоту. Сигнал про діюче значення кута тангажа поступає з датчика кута 12, на перший вхід електронного ключа 19 і на вхід 6 фільтра 3, тобто на перший вхід компаратора 15. На другий вхід компаратора 15 подається сигнал про задане значення кута тангажа ЛА. Якщо сигнали на першому та другому входах мають невелику різницю, то на перший вхід тригера 18 через елемент затримки 16 пройде сигнал "0" та тригер буде зачиненим і електронний ключ 19 залишиться в положенні 1. В іншому випадку на тригер 18 пройде сигнал "1", тригер переключиться в протилежний стан, перемикаючи електронний ключ 19 в положення 2, подаючи сигнал на вхід обмежувача рівня сигналу 20, який масштабує дійсне значення кута тангажа до порядку заданого значення і подає його на суматор 21, вихід якого з'єднаний з порівнювальним пристроєм 1, який видає різницю між діючим та заданим значенням кута тангажа, тобто сигнал похибки. Сигнал про діюче значення кута тангажа також поступає з першого виходу датчика кута 12 на вхід другого фільтра 23 та на вхід блока знаменника моделі еталонної поведінки системи 24, що має електричний зв'язок з другим порівнювальним пристроєм 25, на перший вхід якого поступає сигнал еталонної поведінки системи, а на другий вхід - сигнал про задане значення кута тангажа Jз. Ці два сигнали порівнюються, та сигнал похибки передається на другий вхід другого блоку множення сигналів 29 та на другий вхід першого блоку множення сигналів 27. Вихідний сигнал другого фільтра 23 поступає на блок диференціювання 26, з виходу якого подається на перший вхід першого блоку множення сигналів, та на другий вхід другого блоку множення сигналів 29. Вихідний сигнал з першого блоку множення сигналів 27 подається на вхід першого погоджувального інтегратора з настроюваними параметрами 28, з виходу якого сигнал поступає на перший вхід четвертого суматора 31. Вихідний сигнал з другого блоку множення сигналів 29 подається на другий вхід др угого погоджувального інтегратора з настроюваними параметрами 30, з виходу якого сигнал поступає на другий вхід четвертого суматора 31. На третій вхід четвертого суматора 31 подається сигнал про задане значення кута тангажа Jз. Три отримані сигнали сумуються, та вихідний сигнал четвертого суматора 31 поступає на другий вхід третього електронного ключа 33. Якщо третій електронний ключ 33 знаходиться в положенні "1" або "2" адаптація в системі управління відповідно або відключена (Фіг.2, Фіг.3), або включена (Фіг.4, Фіг.5). Тобто, у разі наявності початкової невизначеності третій електронний ключ 33 перемикається у положення "2", та на вхід порівнювального пристрою 1 подається сигнал адаптації, який видає різницю між діючим та заданим значенням кута тангажа та додатковим сигналом адаптації, тобто сигнал похибки, необхідний для подальшого управління системою. Таким чином, введення до складу системи додатково другого фільтра, блока знаменника моделі еталонної поведінки системи, другого порівнювального пристрою, блока диференціювання, першого та другого блоків множення сигналів, першого та другого погоджувальних інтеграторів з настро 7 35826 юваними параметрами, четвертого суматора, блока чисельника моделі еталонної поведінки системи та третього електронного ключа дозволяє забезпечити працездатність та нормальне функціонування системи управління безпілотним літальним Комп’ютерна в ерстка Н. Лисенко 8 апаратом в процесі польоту за наявності початкової невизначеності та появі будь-яких зовнішніх збурювань за рахунок додаткового сигналу адаптації. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive system of angular stabilization of unmanned air vehicle
Автори англійськоюSymonov Volodymyr Fedorovych, Bandura Ivan Mykolaiovych, Amelina Iryna Viktorivna
Назва патенту російськоюАдаптивная система угловой стабилизации беспилотного летательного аппарата
Автори російськоюСимонов Владимир Федорович, Бандура Иван Николаевич, Амелина Ирина Викторовна
МПК / Мітки
МПК: G05D 1/03, B64C 13/00
Мітки: безпілотного, літального, адаптивна, стабілізації, апарата, система, кутової
Код посилання
<a href="https://ua.patents.su/4-35826-adaptivna-sistema-kutovo-stabilizaci-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Адаптивна система кутової стабілізації безпілотного літального апарата</a>
Пристрій для кутової стабілізації безпілотного літального апарата

Номер патенту: 29176
Опубліковано: 10.01.2008
Автори: Амеліна Ірина Вікторівна, Субота Анатолій Максимович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, безпілотного, кутової, літального, стабілізації, пристрій
Формула / Реферат:
Пристрій для кутової стабілізації безпілотного літального апарата, що містить датчик відхилення кутового положення літального апарата від програмного значення, перетворювач аналог-код, форсуючу ланку, перший перетворювач код-аналог, рульовий привід органів керування, перший, другий, третій та четвертий блоки інтегрування, перший, другий та третій інвертори, перший і другий блоки виділення знака сигналу, блок визначення функції зсуву та...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Амелін Сергій Вікторович, Бандура Іван Миколайович, Антошик Вікторія Миколаївна, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: літального, система, стабілізації, безпілотного, апарата
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Величко Надія Вікторівна
МПК: G05D 1/03, B64C 13/00
Мітки: система, апарата, безпілотного, стабілізації, літального
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Литвиненко Денис Володимирович, Паніна Алла Володимирівна, Симонов Володимир Федорович
МПК: G05D 1/03
Мітки: літального, стабілізації, система, апарата, безпілотного
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Відмовостійка система керування боковим рухом безпілотного літального апарата

Номер патенту: 35088
Опубліковано: 26.08.2008
Автори: Бандура Іван Миколайович, Амеліна Ірина Вікторівна, Симонов Володимир Федорович
МПК: G05D 1/03, B64C 13/00
Мітки: боковим, керування, безпілотного, відмовостійка, система, апарата, рухом, літального
Формула / Реферат:
Відмовостійка система керування боковим рухом безпілотного літального апарата, що містить перший датчик кутової швидкості рискання, перший та другий суматори, перший та другий підсилювачі, привід керма напрямку, датчик положення керма напрямку, перший датчик кутової швидкості крену, привід елеронів, обчислювач значень кута крену, перший, другий датчики тиску, датчик положення елеронів, блок віднімання, формувач значень сигналу кута ковзання,...
Попередній патент: Спосіб профілактики синьогнійної інфекції
Наступний патент: Гідропневматична ресора
Випадковий патент: Установка для використання пари при роботі двигуна внутрішнього згоряння