Механізм прямолінійного переміщення точки
Номер патенту: 104104
Опубліковано: 12.01.2016
Автори: Амбарцумянц Рубен Робертович, Амбарцумянц Роберт Вачаганович
Формула / Реферат
Механізм прямолінійного переміщення точки, який складається з корпусу, ведучого вала, кривошипа, шести рухомих важелів, який відрізняється тим, що кривошип виконаний з двох важелів, жорстко закріплених між собою під кутом більше нуля градусів, але менше 180° і з'єднаний шарнірно з веденим кривошипом, аналогічним ведучому, шатунами однакової довжини, рівною довжині відстані між центрами обертання ведучого і веденого кривошипів, з ведучим кривошипом жорстко закріплено зубчасте колесо з центром обертання у шарнірному з'єднанні ведучий кривошип-шатун, яке зачеплене з другим таким же колесом з передаточним відношенням між ними "одиниця" з негативною ознакою, друге зубчасте колесо рухоме і співвісно встановлено у шарнірному з'єднанні ведений кривошип-шатун, з другим зубчастим колесом співвісно з ним жорстко закріплений важіль з довжиною, рівною довжині кривошипа, де він встановлений, і з кутом 180° відносно веденого кривошипа у його положенні під кутом 90° відносно осьової лінії центрів обертання веденого і ведучого кривошипів.
Текст
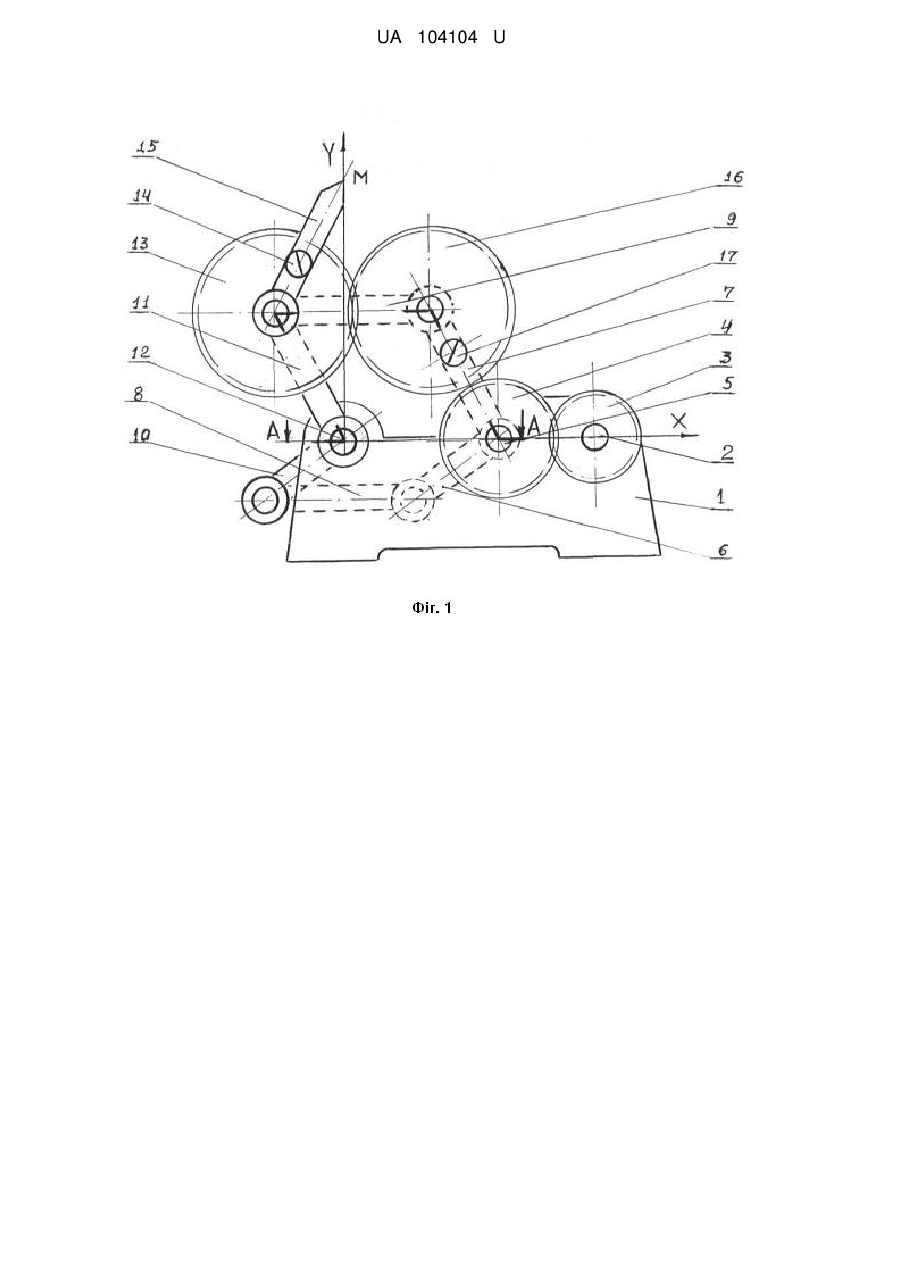
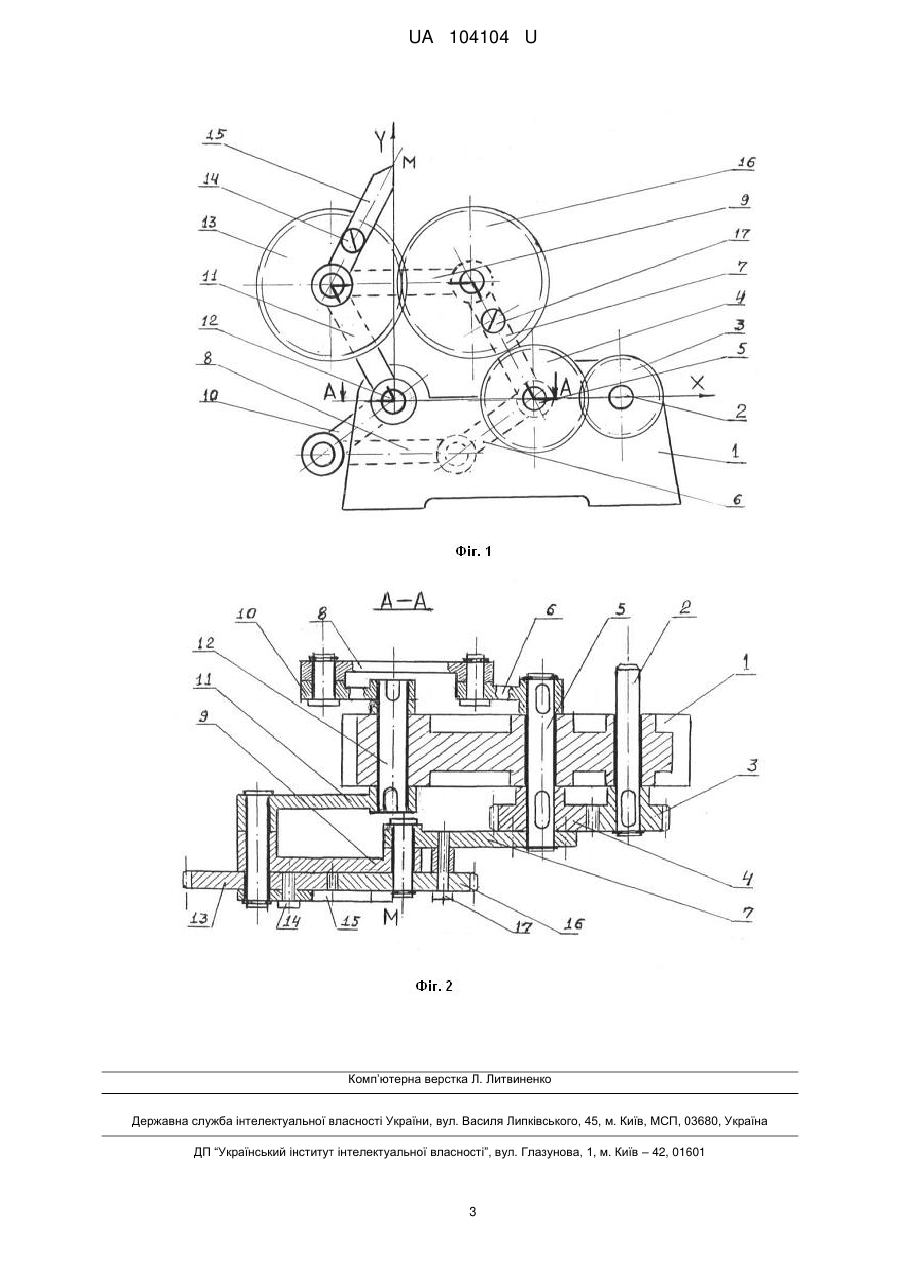
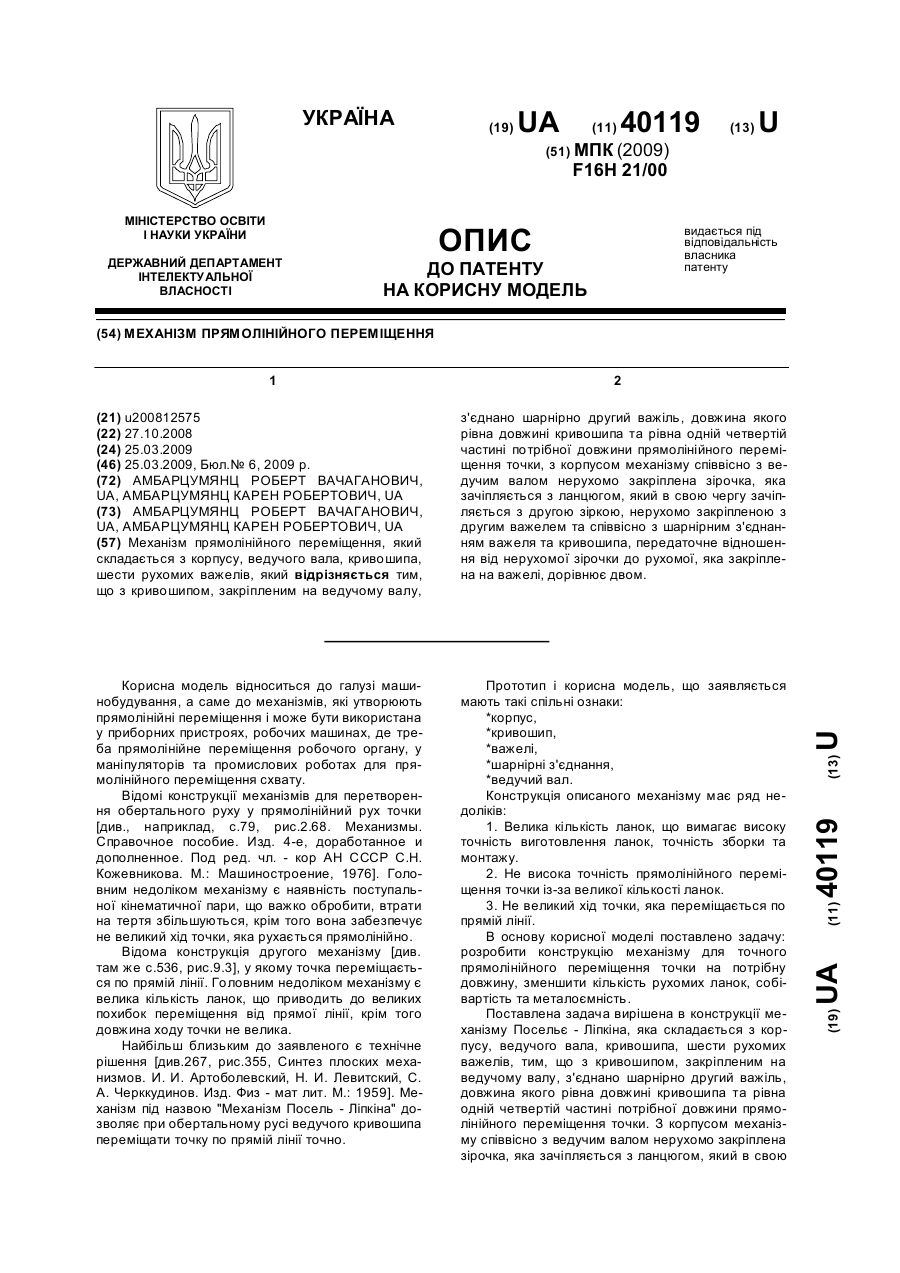
Реферат: Механізм прямолінійного переміщення точки складається з корпусу, ведучого вала, кривошипа, шести рухомих важелів. Кривошип виконаний із двох важелів, жорстко закріплених між собою під кутом більше нуля градусів, але менше 180° і з'єднаний шарнірно з веденим кривошипом, аналогічним ведучому, шатунами однакової довжини, рівної довжині відстані між центрами обертання ведучого і веденого кривошипів. З ведучим кривошипом жорстко закріплене зубчасте колесо з центром обертання у шарнірного з'єднання ведучий кривошип-шатун, яке зачеплене з другим таким же колесом з передаточним відношенням між ними "одиниця" з негативною ознакою. Друге зубчасте колесо рухоме і співвісно встановлено у шарнірного з'єднання ведений кривошип-шатун. З другим зубчастим колесом співвісно з ним жорстко закріпленій важіль з довжиною, рівною довжині кривошипа. UA 104104 U (54) МЕХАНІЗМ ПРЯМОЛІНІЙНОГО ПЕРЕМІЩЕННЯ ТОЧКИ UA 104104 U UA 104104 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування, а саме до механізмів, які утворюють прямолінійні переміщення і може бути використана у приладних пристроях, робочих машинах, де треба прямолінійне переміщення робочого органу, у маніпуляторів та промислових роботах для прямолінійного переміщення захоплювача. Відомі конструкції механізмів для перетворення обертальною руху у прямолінійний рух точки (див., наприклад, с. 79, рис. 2.68. Механизмы. Справочное пособие. Изд. 4-е, дороботанное и дополненное. Под ред. чл. - кор АН СССР С.Н. Кожевникова. М.: Машиностроение. 1976). Головним недоліком механізму є наявність поступальної кінематичної пари, що важко обробити, втрати на тертя збільшуються, крім того, вона забезпечує невеликий хід точки, яка рухається прямолінійно. Відома конструкція другого механізму (див. там же, с. 536, рис. 9.3), у якому точка переміщається по прямій лінії. Головним недоліком механізму є велика кількість ланок, що призводить до великих похибок переміщення від прямої лінії, крім того, довжина ходу точки невелика. Найбільш близьким до заявленого є технічне рішення (див. с. 267. рис. 355. Синтез плоских механизмов. И.И. Артоболевский, Н.И. Левитский, С.А. Черккудинов. Изд. Физ-мат лит. М.: 1959). Механізм під назвою "Механізм Посельє-Ліпкіна" дозволяє при обертальному русі ведучого кривошипа переміщати точку по прямій лінії точно. Найближчий аналог і корисна модель, що заявляється, мають такі спільні ознаки: * корпус, * кривошип, * важелі, * шарнірні з'єднання, * ведучий вал. Конструкція описаного механізму має ряд недоліків: 1) велика кількість ланок, що вимагає високу точність виготовлення ланок, точність складання та монтажу. 2) невисока точність прямолінійного переміщення точки через велику кількість ланок. 3) невеликий хід точки, яка переміщається по прямій лінії. 4) складність шарнірних кінематичних пар, де сполучені між собою більш ніж дві ланки. В основу корисної моделі поставлено задачу розробити конструкцію механізму для точного прямолінійного переміщення точки на потрібну довжину, зменшити кількість рухомих ланок, собівартість та металоємкість. Поставлена задача вирішена в конструкції механізму Посельє-Ліпкіна, яка складається з корпусу, ведучого вала, кривошипа, шести рухомих важелів, згідно з корисною моделлю, кривошип виконаний з двох важелів, жорстко закріплених між собою під кутом більше нуля, але менше 180°, і з'єднаний шарнірно з веденим кривошипом, аналогічним ведучому, шатунами однакової довжини, рівною довжині відстані між центрами обертання ведучого і веденого кривошипів, з ведучим кривошипом жорстко закріплене зубчасте колесо з центром обертання у шарнірному з'єднанні ведучий кривошип-шатун, яке зачеплене з другим таким же колесом з передаточним відношенням між ними "одиниця" з негативною ознакою, друге зубчате колесо рухоме і співвісно встановлене у шарнірному з'єднанні ведений кривошип-шатун, з другим зубчастим колесом співвісно з ним жорстко закріплений важіль з довжиною, рівною довжині кривошипа, де він встановлений, і з кутом 180° відносно веденого кривошипа у його положенні під кутом 90° відносно міжосьової лінії центрів обертання веденого і ведучого кривошипів. Таке конструктивне виконання важільного механізму з п'ятьма ланками, які рухаються, забезпечує переміщення точки точно по прямій лінії на чотири довжини кривошипа, спрощує конструкцію механізму, зменшує кількість рухомих ланок, собівартість та металоємкість. Механізм прямолінійного переміщення точки зображено на кресленні, де на фіг.1 вигляд спереду по фіг. 2. На фіг. 2 виглядв розрізі А-А у розгортці по фіг.1 із місцевими розрізами. Механізм прямолінійного переміщення точки складається з корпуса 1, на якому рухомо встановлені ведучий вал 2. На ведучому валу 2 за допомогою шпонки жорстко закріплено зубчасте колесо 3, яке зачеплене із зубчастим колесом 4. Зубчасте колесо 4 за допомогою шпонки закріплено на валу 5, на якому за допомогою шпонки закріплений важіль 6. Із зубчастим колесом 4 співвісно закріплений жорстко важіль 7. Важелі 6 і 7 утворюють разом ведучий кривошип таким чином, що кут між поздовжніми осями важелів 6 і 7 більше нуля градусів, але менше 180°. Важелі 6 і 7 утворюють шарнірне з'єднання з шатунами 8 і 9 однакової довжини. Шатуни 8 і 9 другими своїми кінцями шарнірно сполучені з важелями 10, 11, які в свою чергу за допомогою шпонок закріплені на валу 12, який встановлений рухомо у корпусі 1. Відстань між осями обертання валів 5 і 12 дорівнює довжині шатунів 8, 9. Важелі 10, 11 утворюють разом 1 UA 104104 U 5 10 15 20 ведений кривошип таким чином, що кут між подовжніми осями важелів 10 і 11 більше нуля градусів, але менше 180°. Співвісно із шарнірним з'єднанням важеля 11 та шатуна 9 рухомо встановлено зубчасте колесо 13, з яким, співвісно, за допомогою гвинта 14, закріплений важіль 15 під кутом 180° відносно веденого важеля 11 у його положенні під кутом 90°, відносно осьової лінії центрів обертання веденого і ведучого кривошипів. Зубчасте колесо 13 зачеплене з зубчастим колесом 16 і від нього отримує обертальний рух у зворотному напрямку на такій же кут, що і колесо 16, так як передаточне відношення між ними дорівнює "одиниця" з негативною ознакою. Механізм прямолінійного переміщення точки працює наступним чином. Рух від електродвигуна, або другого джерела (не показано на кресленні) передається ведучому валу 2. Від ведучого вала 2 рух, через зубчасте зачеплення 3-4, передасться валу 5, який приводить в обертальний рух важелі 6 і 7 (ведучий кривошип). Від важелів 6 і 7, через шатуни 8 та 9 рух передається важелям 10 та 11 (ведений кривошип) і від них валу 12. Обертальний рух одночасно від важеля 7 передається зубчастому колесу 16, так як вони жорстко закріплені між собою. Від зубчастого колеса 16 рух передасться до зубчастого колеса 13 і через гвинт 14 до важеля 15. Так як передаточне відношення між ними дорівнює "одиниця" з негативною ознакою, то зубчасте колесо 13, а заодно і важіль 15 обертаються на такий же кут, що і зубчасте колесо 16 важіль 7. Тоді кінцева точка Μ важеля 15 переміщається по осі Υ-ів, яка проходить через центр обертання вала 12 і за період обертання ведучого вала на 180° вершина важеля 15 (точка М) переміщається на чотири довжини важеля 11. Таке конструктивне виконання важільного механізму з п'ятьма рухомими ланками забезпечує переміщення точці по прямій лінії на чотири довжини ведучої ланки, спрощує конструкцію механізму, зменшує кількість рухомих ланок, собівартість, металоємкість та вплив похибок виготовлення на точність траєкторії точки, яка переміщається по прямій лінії. 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Механізм прямолінійного переміщення точки, який складається з корпусу, ведучого вала, кривошипа, шести рухомих важелів, який відрізняється тим, що кривошип виконаний з двох важелів, жорстко закріплених між собою під кутом більше нуля градусів, але менше 180° і з'єднаний шарнірно з веденим кривошипом, аналогічним ведучому, шатунами однакової довжини, рівної довжині відстані між центрами обертання ведучого і веденого кривошипів, з ведучим кривошипом жорстко закріплено зубчасте колесо з центром обертання у шарнірному з'єднанні ведучий кривошип-шатун, яке зачеплене з другим таким же колесом з передаточним відношенням між ними "одиниця" з негативною ознакою, друге зубчасте колесо рухоме і співвісно встановлено у шарнірному з'єднанні ведений кривошип-шатун, з другим зубчастим колесом співвісно з ним жорстко закріплений важіль з довжиною, рівною довжині кривошипа, де він встановлений, і з кутом 180° відносно веденого кривошипа у його положенні під кутом 90° відносно осьової лінії центрів обертання веденого і ведучого кривошипів. 2 UA 104104 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюAmbartsumiants Robert Vachahanovych, Ambartsumiants Ruben Robertovych
Автори російськоюАмбарцумянц Роберт Вачаганович, Амбарцумянц Рубен Робертович
МПК / Мітки
МПК: F16H 21/18, F16H 21/00
Мітки: механізм, переміщення, прямолінійного, точки
Код посилання
<a href="https://ua.patents.su/5-104104-mekhanizm-pryamolinijjnogo-peremishhennya-tochki.html" target="_blank" rel="follow" title="База патентів України">Механізм прямолінійного переміщення точки</a>
Механізм прямолінійного переміщення
Номер патенту: 40119
Опубліковано: 25.03.2009
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
МПК: F16H 21/00
Мітки: механізм, переміщення, прямолінійного
Формула / Реферат:
Механізм прямолінійного переміщення, який складається з корпусу, ведучого вала, кривошипа, шести рухомих важелів, який відрізняється тим, що з кривошипом, закріпленим на ведучому валу, з'єднано шарнірно другий важіль, довжина якого рівна довжині кривошипа та рівна одній четвертій частині потрібної довжини прямолінійного переміщення точки, з корпусом механізму співвісно з ведучим валом нерухомо закріплена зірочка, яка зачіпляється з ланцюгом,...
Мультиплікатор прямолінійного переміщення
Номер патенту: 49420
Опубліковано: 26.04.2010
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК: F16H 21/00
Мітки: переміщення, прямолінійного, мультиплікатор
Формула / Реферат:
1. Мультиплікатор прямолінійного переміщення, що містить корпус, з яким з'єднаний вхідний п'ятиланковий механізм та багаторазові п'ятиланкові ведені механізми, який відрізняється тим, що вихідний п'ятиланковий механізм замінений вхідним валом, встановленим рухомо у корпусі, а з корпусом, співвісно з вхідним валом, жорстко закріплена зірочка, з вхідним валом жорстко закріплено перший важіль, у другому кінці першого важеля рухомо встановлено...
Зубчасто-важільний механізм поступального переміщення об’єкта

Номер патенту: 38996
Опубліковано: 26.01.2009
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК: F16H 21/00
Мітки: поступального, зубчасто-важільний, об'єкта, переміщення, механізм
Формула / Реферат:
Зубчасто-важільний механізм поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, шатуни, об'єкт, що утворює шарнірні з'єднання із шатунами, який відрізняється тим, що об'єкт одним кінцем шарнірно з'єднаний із шатуном кривошипно-коромислового механізму, а іншим кінцем шарнірно з'єднаний з іншим шатуном, що утворює шарнірне з'єднання з важелем, жорстко закріпленим з зубчастим колесом, встановленим на вал шарнірного...
Механізм кругового поступального переміщення об’єкта
Номер патенту: 47059
Опубліковано: 11.01.2010
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК: F16H 21/00
Мітки: механізм, кругового, переміщення, поступального, об'єкта
Формула / Реферат:
Механізм кругового поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, об'єкт переміщення, зачеплення між зубцями, який відрізняється тим, що об'єкт жорстко з'єднується із зірочкою, яка утворює рухоме з'єднання з кривошипом, іншим своїм кінцем кривошип утворює жорстке з'єднання з ведучим валом, який в свою чергу утворює рухоме з'єднання з корпусом за допомогою підшипників кочення, у корпусі нерухомо і співвісно з...
Регульований шестиланковий шарнірно-важільний механізм поступального переміщення об’єкта
Номер патенту: 87316
Опубліковано: 10.02.2014
Автори: Амбарцумянц Роберт Вачаганович, Арабаджи Олена Дмитрівна, Амбарцумянц Карен Робертович
МПК: F16H 21/00
Мітки: поступального, механізм, шестиланковий, переміщення, регульованій, об'єкта, шарнірно-важільний
Формула / Реферат:
Шестиланковий важільний механізм поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, шатун кривошипно-повзунного механізму, повзун, додатковий шатун, циліндричні пальці, який відрізняється тим, що на циліндричному пальці шарнірного з'єднання шатуна кривошипно-повзунного механізму і повзуна рухливо і співісно з пальцем встановлено черв'ячне колесо, зачеплене з черв'яком, рухливо встановленим на підставі, жорстко...
Попередній патент: Механічний безмуфтовий прес
Наступний патент: Спосіб отримання продукту сирного плавленого скибкового
Випадковий патент: Спосіб вироблення рідкого переробного чавуну із залізної руди та пристрій для його здійснення