Мультиплікатор прямолінійного переміщення
Номер патенту: 49420
Опубліковано: 26.04.2010
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович

Формула / Реферат
1. Мультиплікатор прямолінійного переміщення, що містить корпус, з яким з'єднаний вхідний п'ятиланковий механізм та багаторазові п'ятиланкові ведені механізми, який відрізняється тим, що вихідний п'ятиланковий механізм замінений вхідним валом, встановленим рухомо у корпусі, а з корпусом, співвісно з вхідним валом, жорстко закріплена зірочка, з вхідним валом жорстко закріплено перший важіль, у другому кінці першого важеля рухомо встановлено перший валик, на якому рухомо закріплена перша зірочка, кількість зубців якої у два рази менше кількості зубців нерухомої зірочки, і ці зірочки з'єднані між собою першим ланцюгом, на перший валик жорстко закріплено другий важіль, довжина якого дорівнює довжині першого важеля, а також зірочка, аналогічно першій зірочці, у другому кінці другого важеля встановлено другий валик, на якому рухомо встановлена друга зірочка з кількістю зубців, як у першій зірочці, і вона жорстко закріплена на другий валик, перша і друга зірочки з'єднані між собою другим ланцюгом, на другому валику рухомо з'єднана зірочка, аналогічно другій зірочці, і вона нерухомо закріплена з третім важелем, аналогічним чином з'єднані між собою останні важелі і до n-го.
2. Мультиплікатор за п. 1, який відрізняється тим, що довжини у всіх важелів однакові, передаточне відношення першої ланцюгової передачі дорівнює "два", у останніх ланцюгових передач передаточне відношення дорівнює "одиниця".
3. Мультиплікатор за п. 1, який відрізняється тим, що кількість важелів дорівнює n=S/2·l,
де
n - кількість важелів,
S - довжина прямолінійного переміщення точки,
l - довжина першого важеля.
Текст
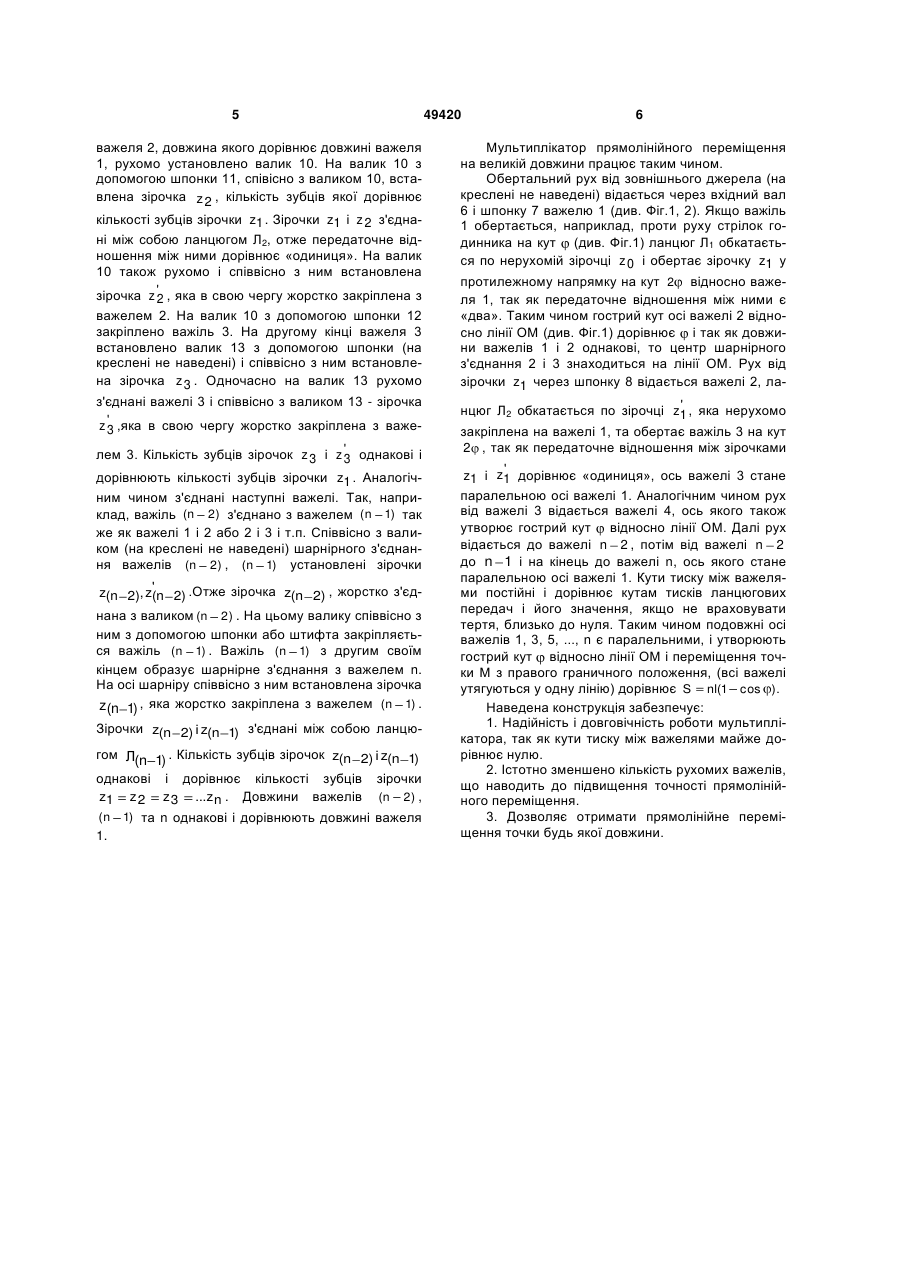
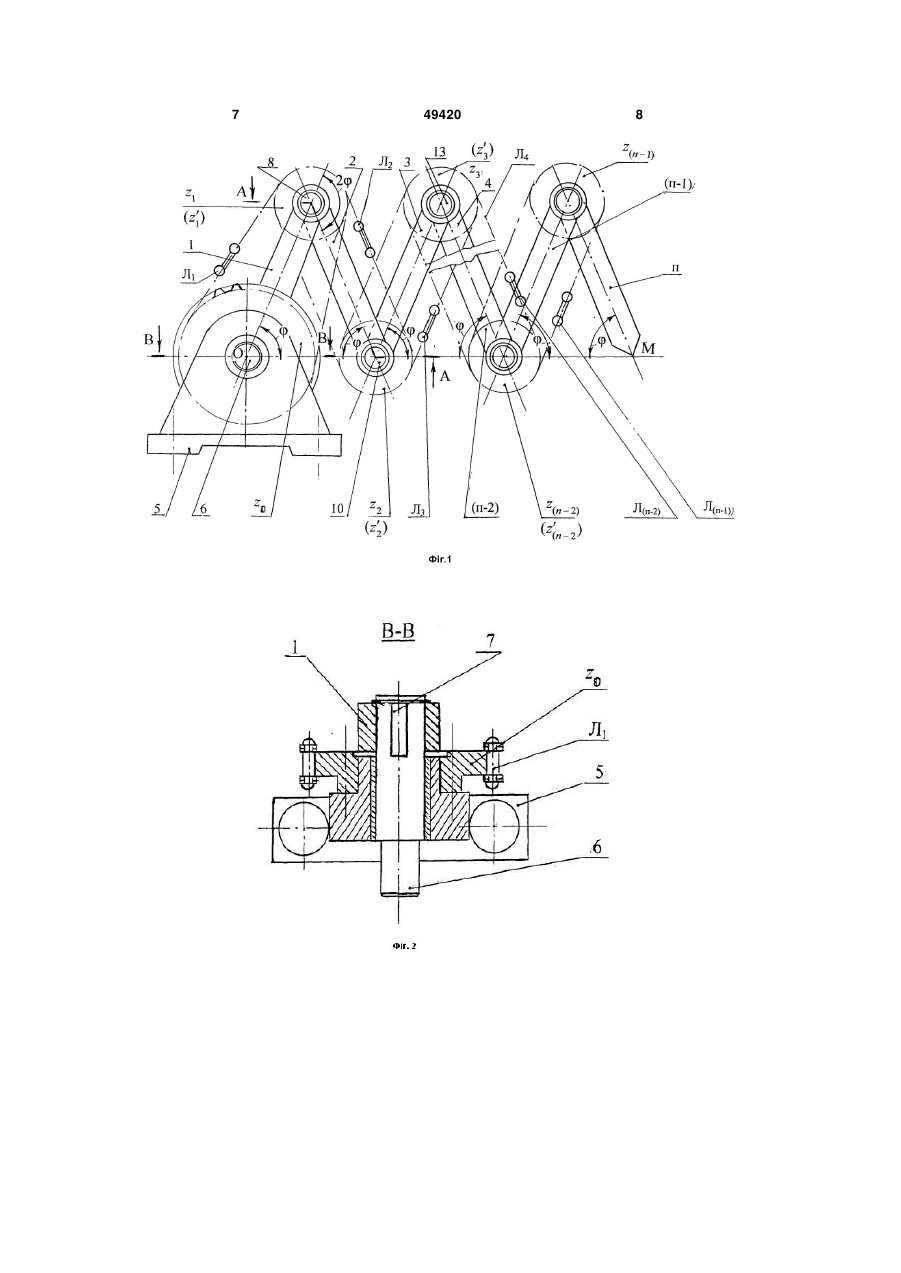
1. Мультиплікатор прямолінійного переміщення, що містить корпус, з яким з'єднаний вхідний п'ятиланковий механізм та багаторазові п'ятиланкові ведені механізми, який відрізняється тим, що вихідний п'ятиланковий механізм замінений вхідним валом, встановленим рухомо у корпусі, а з корпусом, співвісно з вхідним валом, жорстко закріплена зірочка, з вхідним валом жорстко закріплено перший важіль, у другому кінці першого важеля рухомо встановлено перший валик, на якому рухомо закріплена перша зірочка, кількість зубців якої у два рази менше кількості зубців нерухомої зірочки, і ці зірочки з'єднані між собою першим ланцюгом, на перший валик жорстко закріплено U 1 3 Кожевникова. М. Машиностроение, 1976). Механізм під назвою «шарнирный множительный параллелограмм», що і є мультіплікатор, дозволяє прямолінійний рух точки вхідного механізму перетворити в прямолінійний рух точки вихідного механізму. Цей механізм складається із двох частин: перша частина є механізм шарнірний п'яти ланковий механізм, який створює обертальну кінематичну пару з корпусом механізму; друга частина є декілька других п'яти ланкових механізмів, декілька ланок яких жорстко між собою з'єднані. Механізм працює таким чином. Від зовнішнього джерела (наприклад, гідро або пневмо приводів) віддається прямолінійний рух шарніру, де з'єднані два шатуна шарнірного п'яті ланкового механізму першої частині. Переміщення цього шарніра через шатуни перетворюється в обертальний рух у протилежних напрямках ланок, які з'єднані шарнірно з шатунами і з корпусом. Від цих ланок, які являються також ланками першого п'яти ланкового механізму другої частини, рух передається двом його шатунам і центр їх шарнірного з'єднання переміщується по прямій лінії на таку же величину, що і точка механізму першої частиш. Від першого п'ятиланкового механізму другої частини аналогічним чином рух передається другому, потім третьому і так до останнього механізму. Таким чином переміщення точки по прямій лінії складається від порівняних між собою прямолінійних переміщень окремих п'яти ланкових механізмів другої частини. З обліком того, що у вхідного п'ятиланкового механізму із-за обмеження кутів тиску між шатунами і з'єднаними з ними другими ланками (важелями), переміщення точки по прямої лінії, відносно довжин ланок, не більше, то для одержування більшої довжини переміщення точки по прямій лінії треба, щоби були з'єднані великі кількості п'яти ланкових механізмів другої частини. Прототип і корисна модель, що заявляється мають таки спільні ознаки: - корпус, - важелі (ланки), - шарнірні з'єднання. Конструкція описаного механізму має ряд недоліків: 1. Необхідність додаткового механізму для переміщення центру шарнірного з'єднання першого п'ятиланкового механізму (наприклад, кривошипно-повзуний механізм,або гідро, або пневмо механізми). 2. Важелі великої кількості і їх шарнірних з'єднань, що негативно впливає на точність прямолінійного переміщення точки. 3. Великі кількості п'ятиланкових механізмів другої частини для одержання прямолінійного переміщення великої довжини. 4. Погані умови роботи п'ятиланкових механізмів в положеннях, коли шатуни та ведені важелі утягаються у одну лінію, або укладаються одне над друге, так як куті тиски у цих положеннях близько або дорівнюються нулю. В основу корисної моделі поставлена задача розробити конструкцію механізму для одержання прямолінійного переміщення точки по прямій лінії будь-якої довжини з не великою кількістю ланок 49420 4 (важелі), без додаткового механізму, а також з постійним значенням кутів диску близько до нуля у всіх положеннях між усіма важелями. Поставлена задача вирішена в конструкції механізму «шарнирный множительный механизм», який складається з вхідного і багатократного вихідних п'яти ланкових механізмів в тім, що вихідний п'ятиланковий механізм замінений вхідним валом, встановленим рухомо у корпусі, а з корпусом, співвісно з вхідним валом, жорстко закріплена зірочка. З вхідним валом жорстко закріплені першій важіль, у другому кінці першого важеля рухомий встановлені перший валик, на якому рухомо закріплена перша зірочка, кількість зубців якої у два рази менше кількості зубців нерухомої зірочки, і ці зірочки з'єднані між собою першим ланцюгом. На перший валик жорстко закріплені другий важіль, довжина якого дорівнює довжині першого важеля, а також зірочка, аналогічна першій зірочці, у другому кінці другого важеля встановлено другій валик, на якому рухомо встановлена друга зірочка з кількістю зубців, як у першій зірочці, і вона жорстко закріплена на другий валик. Перша і друга зірочки з'єднані між собою другим ланцюгом. На другому валику рухомо з'єднана зірочка, аналогічно другій зірочці і вона нерухомо з'єднана з третім важелем. Аналогічним чином з'єднані між собою останні важелі до n-го. Таке конструктивне виконання важільного мультиплікатора дозволяє переміщати точки по прямій лінії великої довжини, зменшити кількість ланок множительного механізму, що приведе до зменшення металоємності, покращити умови його роботи, так як куті тиску між важелями дорівнює куту тиску ланцюгових передач і вони постійні за весь час роботи механізму і близькі до нуля. Довжина прямолінійного переміщення точки залежить від довжини першого важеля і їх кількості. Отже, якщо довжина прямолінійного переміщення точки є S, а довжина першого важеля є l, то кількість важелів дорівнює n S / l . Таким чином, якщо треба, зменшити кількості важелів, треба збільшити довжину важелів. Конструкція мультиплікатора зображена на креслені, де На Фіг.1 вигляд спереду. На Фіг.2 розтин В-В по Фіг.1. На Фіг.3 розтин А-А по Фіг.1. Мультиплікатор прямолінійного переміщення складається з корпуса 5 (див. Фіг.1, 2). У корпуса 5 встановлений рухомий вхідний вал 6 і співвісно з ним та жорстко закріплена з корпусом зірочка z 0 . З вхідним валом 6 з допомогою шпонки 7 з одним кінцем з'єднаний важіль 1, який другім своїм кінцем рухомо з'єднаний з валиком 8 (див. Фіг.3). На валик 8 співвісно з ним рухомо посаджена зірочка z1 і жорстко закріплена з важелем 1. Кількість зубців зірочки z1 у два рази менше кількості зубців зірочки z 0 , і вони з'єднані між собою ланцюгом Л1, отже передаточне відношення між ними дорівнює «двом». На валик 8 з допомогою шпонки 9 ' закріплені важелі 2 і зірочка z1 . У другому кінці 5 важеля 2, довжина якого дорівнює довжині важеля 1, рухомо установлено валик 10. На валик 10 з допомогою шпонки 11, співісно з валиком 10, вставлена зірочка z 2 , кількість зубців якої дорівнює кількості зубців зірочки z1 . Зірочки z1 і z 2 з'єднані між собою ланцюгом Л2, отже передаточне відношення між ними дорівнює «одиниця». На валик 10 також рухомо і співвісно з ним встановлена зірочка z '2 , яка в свою чергу жорстко закріплена з важелем 2. На валик 10 з допомогою шпонки 12 закріплено важіль 3. На другому кінці важеля 3 встановлено валик 13 з допомогою шпонки (на креслені не наведені) і співвісно з ним встановлена зірочка z 3 . Одночасно на валик 13 рухомо з'єднані важелі 3 і співвісно з валиком 13 - зірочка z '3 ,яка в свою чергу жорстко закріплена з важелем 3. Кількість зубців зірочок z 3 і z '3 однакові і дорівнюють кількості зубців зірочки z1 . Аналогічним чином з'єднані наступні важелі. Так, наприклад, важіль (n 2) з'єднано з важелем (n 1) так же як важелі 1 і 2 або 2 і 3 і т.п. Співвісно з валиком (на креслені не наведені) шарнірного з'єднання важелів (n 2) , (n 1) установлені зірочки ' z(n 2), z(n 2) .Отже зірочка z(n 2) , жорстко з'єднана з валиком (n 2) . На цьому валику співвісно з ним з допомогою шпонки або штифта закріпляється важіль (n 1) . Важіль (n 1) з другим своїм кінцем образує шарнірне з'єднання з важелем n. На осі шарніру співвісно з ним встановлена зірочка z(n 1) , яка жорстко закріплена з важелем (n 1) . Зірочки z(n 2) і z(n 1) з'єднані між собою ланцюгом Л(n 1) . Кількість зубців зірочок z(n 2) і z(n 1) однакові і дорівнює кількості зубців зірочки z1 z 2 z 3 ...z n . Довжини важелів (n 2) , (n 1) та n однакові і дорівнюють довжині важеля 1. 49420 6 Мультиплікатор прямолінійного переміщення на великій довжини працює таким чином. Обертальний рух від зовнішнього джерела (на креслені не наведені) відається через вхідний вал 6 і шпонку 7 важелю 1 (див. Фіг.1, 2). Якщо важіль 1 обертається, наприклад, проти руху стрілок годинника на кут (див. Фіг.1) ланцюг Л1 обкатається по нерухомій зірочці z 0 і обертає зірочку z1 у протилежному напрямку на кут 2 відносно важеля 1, так як передаточне відношення між ними є «два». Таким чином гострий кут осі важелі 2 відносно лінії ОМ (див. Фіг.1) дорівнює і так як довжини важелів 1 і 2 однакові, то центр шарнірного з'єднання 2 і 3 знаходиться на лінії ОМ. Рух від зірочки z1 через шпонку 8 відається важелі 2, ла ' нцюг Л2 обкатається по зірочці z1 , яка нерухомо закріплена на важелі 1, та обертає важіль 3 на кут 2 , так як передаточне відношення між зірочками ' z1 і z1 дорівнює «одиниця», ось важелі 3 стане паралельною осі важелі 1. Аналогічним чином рух від важелі 3 відається важелі 4, ось якого також утворює гострий кут відносно лінії ОМ. Далі рух відається до важелі n 2 , потім від важелі n 2 до n 1 і на кінець до важелі n, ось якого стане паралельною осі важелі 1. Кути тиску між важелями постійні і дорівнює кутам тисків ланцюгових передач і його значення, якщо не враховувати тертя, близько до нуля. Таким чином подовжні осі важелів 1, 3, 5, ..., n є паралельними, і утворюють гострий кут відносно лінії ОМ і переміщення точки М з правого граничного положення, (всі важелі утягуються у одну лінію) дорівнює S nl(1 cos ). Наведена конструкція забезпечує: 1. Надійність і довговічність роботи мультиплікатора, так як кути тиску між важелями майже дорівнює нулю. 2. Істотно зменшено кількість рухомих важелів, що наводить до підвищення точності прямолінійного переміщення. 3. Дозволяє отримати прямолінійне переміщення точки будь якої довжини. 7 49420 8 9 Комп’ютерна верстка М. Ломалова 49420 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultiplying gear of straight-line motion
Автори англійськоюAmbartsumiants Robert Vachahanovych, Ambartsumiants Karen Robertovych
Назва патенту російськоюМультипликатор прямолинейного перемещения
Автори російськоюАмбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК / Мітки
МПК: F16H 21/00
Мітки: переміщення, прямолінійного, мультиплікатор
Код посилання
<a href="https://ua.patents.su/5-49420-multiplikator-pryamolinijjnogo-peremishhennya.html" target="_blank" rel="follow" title="База патентів України">Мультиплікатор прямолінійного переміщення</a>
Механізм прямолінійного переміщення
Номер патенту: 40119
Опубліковано: 25.03.2009
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
МПК: F16H 21/00
Мітки: прямолінійного, механізм, переміщення
Формула / Реферат:
Механізм прямолінійного переміщення, який складається з корпусу, ведучого вала, кривошипа, шести рухомих важелів, який відрізняється тим, що з кривошипом, закріпленим на ведучому валу, з'єднано шарнірно другий важіль, довжина якого рівна довжині кривошипа та рівна одній четвертій частині потрібної довжини прямолінійного переміщення точки, з корпусом механізму співвісно з ведучим валом нерухомо закріплена зірочка, яка зачіпляється з ланцюгом,...
Гвинтовий конвеєр прямолінійного переміщення заготовок
Номер патенту: 11979
Опубліковано: 16.01.2006
Автори: Гевко Ігор Богданович, Гевко Іван Богданович, Левенець Володимир Богданович
МПК: B65G 33/16
Мітки: гвинтовий, конвеєр, прямолінійного, заготовок, переміщення
Формула / Реферат:
Гвинтовий конвеєр прямолінійного переміщення заготовок, що містить раму, кожух, гвинтовий робочий орган з центральним валом, привід, механізми підтримки, завантаження, вивантаження, який відрізняється тим, що гвинтовий робочий орган виконано у вигляді двох або більше гвинтових дротяних елементів з мінімальним і максимальним радіусом, які рівномірно по довжині і жорстко з'єднані з радіальними перемичками з різним поперечним перерізом, якими...
Механізм кругового поступального переміщення об’єкта
Номер патенту: 47059
Опубліковано: 11.01.2010
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК: F16H 21/00
Мітки: кругового, поступального, переміщення, механізм, об'єкта
Формула / Реферат:
Механізм кругового поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, об'єкт переміщення, зачеплення між зубцями, який відрізняється тим, що об'єкт жорстко з'єднується із зірочкою, яка утворює рухоме з'єднання з кривошипом, іншим своїм кінцем кривошип утворює жорстке з'єднання з ведучим валом, який в свою чергу утворює рухоме з'єднання з корпусом за допомогою підшипників кочення, у корпусі нерухомо і співвісно з...
Зірочка для просторового ланцюга

Номер патенту: 17661
Опубліковано: 16.10.2006
Автори: Скирденко Олег Іванович, ОВДІЙ ВІКТОР МИКИТОВИЧ, Базалій Валентин Петрович, Базалій Віталій Валентинович
МПК: F16H 55/02
Мітки: зірочка, просторового, ланцюга
Формула / Реферат:
1. Зірочка для просторового ланцюга, що містить маточину, зубці та западини, яка відрізняється тим, що величина кроку зубців дорівнює щонайменше сумі трьох величин проміжків з'єднувальних ланок з можливістю змінювання напрямку руху на кут вліво або вправо відносно прямого руху.2. Зірочка за п. 1, яка відрізняється тим, що западина виконана у вигляді окремих опорних...
Механізм еліпсографа
Номер патенту: 45453
Опубліковано: 10.11.2009
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
МПК: F16H 21/00
Мітки: механізм, еліпсографа
Формула / Реферат:
Механізм еліпсографа, який складається з корпусу, ведучого вала, водила, сателіта, нерухомого колеса з внутрішніми зубцями, який відрізняється тим, що нерухоме колесо виконано у вигляді зірочки з зовнішніми зубцями, яка зачіпляється з ланцюгом, який в свою чергу зачіпляється з другою зірочкою, нерухомо закріпленою з другим важелем, довжина якого менше довжини водила, та співвісно з шарнірним з'єднанням важеля та водила, передаточне відношення...
Попередній патент: Спосіб ремонту кульового млина в зборі
Наступний патент: Нанорідина “дорогоцінний трикутник”
Випадковий патент: Гусенична машина