Спосіб автоматичного контролю точності геодезичних світловіддалемірів
Номер патенту: 105030
Опубліковано: 10.04.2014
Автори: Бурачек Всеволод Германович, Хомушко Дмитро Валерійович, Сухомлин Михайло Юрійович
Формула / Реферат
Спосіб автоматичного контролю точності геодезичних світловіддалемірів, заснований на вимірюванні світловіддалеміром контрольних базисів та подальшому порівнянні еталонних довжин базисів і отриманих приладом, що контролюється, який відрізняється тим, що світловіддалеміром вимірюють довжини еталонних оптоволоконних кабелів, а отримані значення вводять до обчислювального механізму, який порівнює еталонні значення довжин оптоволоконних кабелів, та отримані за допомогою світловіддалеміра і видає на виході точність приладу.
Текст
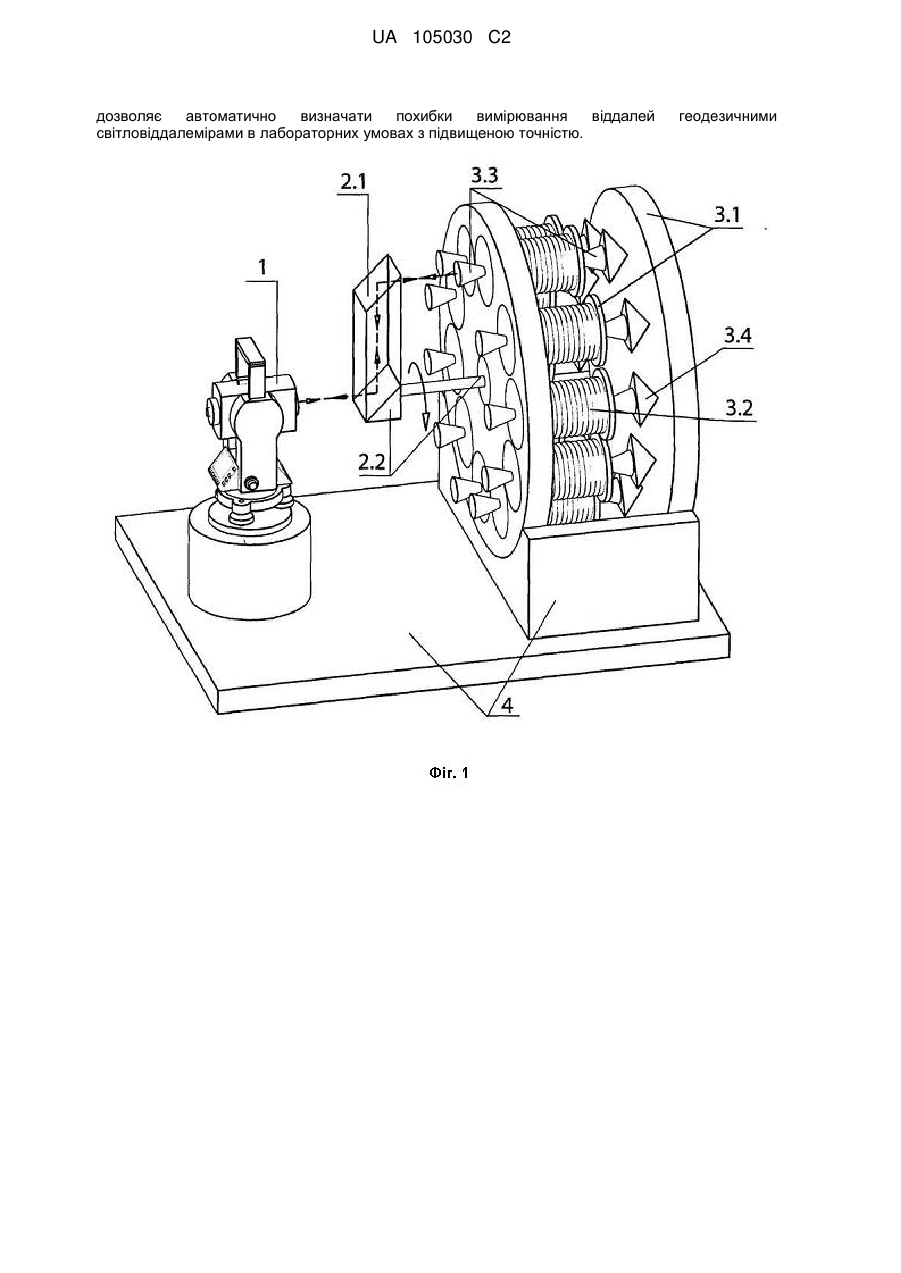
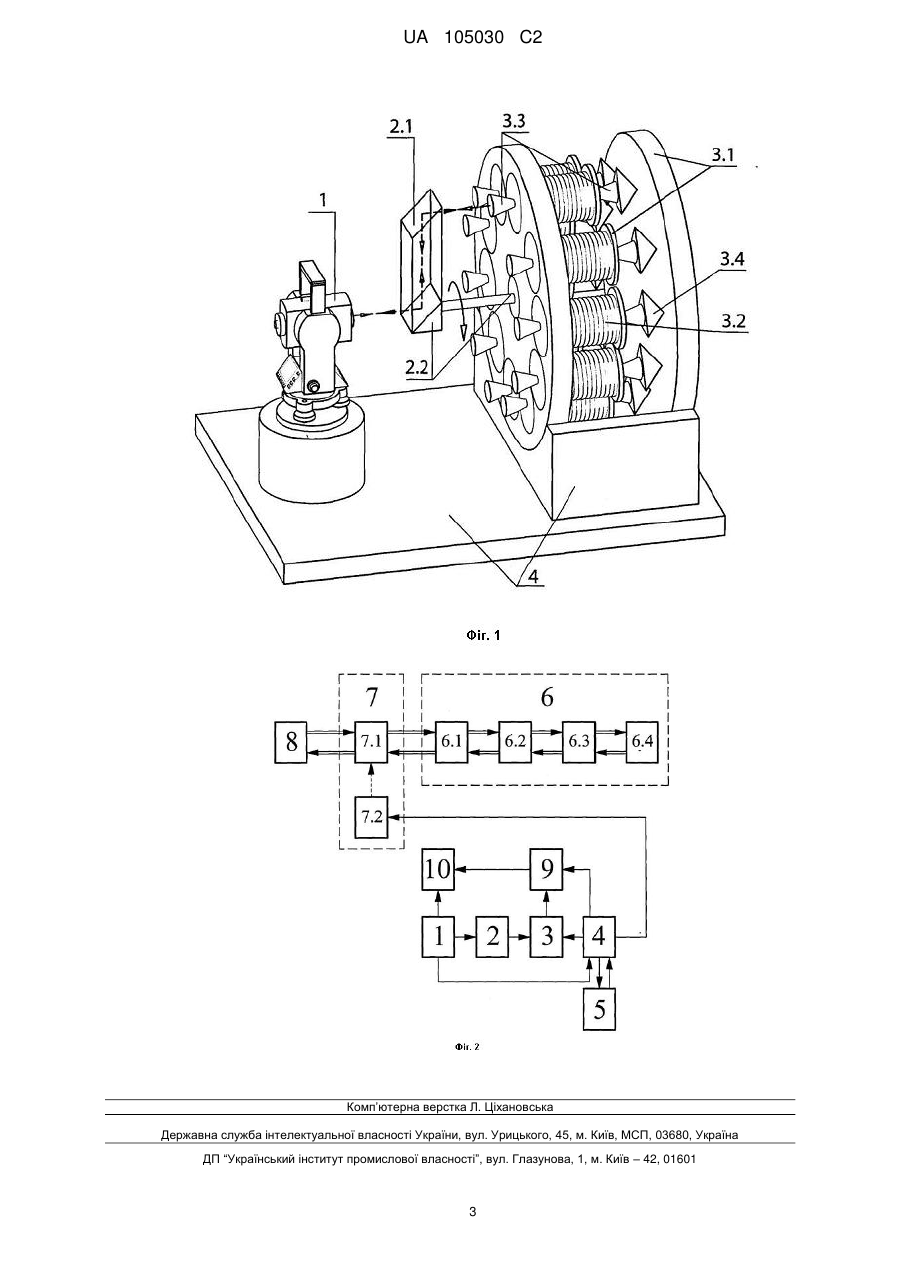
Реферат: Спосіб належить до області геодезії, зокрема до способів контролю точності геодезичних світловіддалемірів. Спосіб автоматичного контролю точності геодезичних світловіддалемірів заснований на вимірюванні світловіддалеміром контрольних базисів та подальшому порівнянні еталонних довжин базисів і отриманих приладом, що контролюється. Світловіддалеміром вимірюють довжини еталонних оптоволоконних кабелів. Отримані значення вводять до обчислювального механізму, який порівнює еталонні значення довжин оптоволоконних кабелів, та отримані за допомогою світловіддалеміра і видає на виході точність приладу. Винахід UA 105030 C2 (12) UA 105030 C2 дозволяє автоматично визначати похибки вимірювання віддалей світловіддалемірами в лабораторних умовах з підвищеною точністю. геодезичними UA 105030 C2 5 10 15 20 25 30 35 40 45 50 55 60 Спосіб належить до області геодезії, зокрема до способів контролю точності геодезичних світловіддалемірів. Загальний стан в даній області характеризується практичною відсутністю способів для автоматичного контролю точності геодезичних світловіддалемірів. На практиці їх точність визначається вимірюванням на полігоні контрольних базисів, довжина якого виміряна з високою точністю; довжини ліній повинні рівномірно вкладатися у діапазон вимірювання віддалей [1]. Як аналог, вибраний за прототип, можна прийняти спосіб, за яким точність світловіддалеміра визначають у результаті багаторазових (не менше ніж 10) вимірювань не менше від трьох контрольних базисів, а самі контрольні базиси вимірюють (еталонують) за допомогою базисного пристрою БП-1 [2, 3]. Недоліком цього способу є те, що сам процес визначення довжини контрольного базису БП-1 є дуже трудомістким, а на результати вимірювань контрольних базисів світловіддалеміром, що контролюється, будуть впливати зовнішні умови [4]. Крім того, на результат базисних вимірювань БП-1 будуть впливати такі систематичні похибки [2]: - похибка власне вимірювання контрольного базису; - похибка нівелювання базисних ціликів; - похибки визначення температурних коефіцієнтів дротів; - похибка визначення довжини жезла. Виключення цих похибок потребує застосування спеціальної методики вимірювань, що потребує додаткового часу (підбір дротів з різними температурними коефіцієнтами, вимірювання базису в прямому і зворотному напрямку тощо), а самі вимірювання потрібно проводити як мінімум 9 чоловікам. Всі вище наведені недоліки виключають можливість автоматично і швидко перевірити точність світловіддалеміра. Задачею винаходу є створення способу, який дозволяє автоматично визначати похибки вимірювання віддалей геодезичними світловіддалемірами в лабораторних умовах з підвищеною точністю. Поставлена задача вирішується за рахунок створення способу автоматичного контролю точності геодезичних світловіддалемірів, заснованого на вимірюванні світловіддалеміром контрольних базисів та подальшому порівнянні еталонних довжин базисів і отриманих приладом, що контролюється, який відрізняється тим, що світловіддалеміром вимірюють довжини еталонних оптоволоконних кабелів, а отримані значення вводять до обчислювального механізму, який порівнює еталонні значення довжин оптоволоконних кабелів, та отримані за допомогою світловіддалеміра і видає на виході точність приладу. Технічним результатом є можливість автоматично визначати похибки вимірювання віддалей геодезичними світловіддалемірами в лабораторних умовах з підвищеною точністю. Запропонований спосіб може бути реалізований пристроєм, функціональна схема якого представлена на фіг. 1. На схемі відповідними цифрами позначено: 1. - прилад, що контролюється (електронний тахеометр); 2.1, 2.2 - блок комутації з механізмом повороту і фіксації: 2.1. - ромбічна призма; 2.2. - механізм повороту і фіксації ромбічної призми; 3.1 - 3.4 - блок еталонних віддалей: 3.1. - барабан з котушками; 3.2 - оптоволоконний кабель; 3.3. - пристрої вводу-виводу світлового випромінювання; 3.4. - відбивач (трисель-призма); 4. - основа пристрою. Прилад, що контролюється (електронний тахеометр) 1 та блок еталонних віддалей 3.1-3.4 жорстко закріплені на основі 4. Блок еталонних віддалей 3.1-3.4 являє собою барабан з котушками 3.1, на які намотані оптоволоконні кабелі 3.2, на кінцях котрих закріплені пристрої вводу-виводу світлового випромінювання 3.3 (наприклад, фокони), при цьому їх центри утворюють коло в вертикальній площині барабана, радіус якого дорівнює перескопічності ромбічної призми 2.1, та відбивачі 3.4 (по одному на оптоволоконний кабель). Механізм повороту та фіксації 2.2 встановлює ромбічну призму 2.1 на позиції пристроїв вводу-виводу світлового випромінювання 3.3. Блок-схема пристрою, що реалізує запропонований спосіб представлена на фіг. 2. На ній одинарними стрілками показано електричні зв'язки, подвійними - оптичні, а штрих-пунктирною стрілкою - механічний зв'язок. 1. - блок введення даних; 1 UA 105030 C2 5 10 15 20 25 30 35 40 45 2. - блок перетворення інформації; 3. - блок порівняння даних; 4. - блок управління; 5. - програмний блок; 6. - блок еталонних віддалей; 6.1, 6.3. - пристрої вводу-виводу світлового випромінювання; 6.2. - оптоволоконний кабель; 6.4. - трисель-призма; 7. - блок комутації з механізмом повороту і фіксації: 7.1. - ромбічна призма; 7.2. - механізм повороту і фіксації ромбічної призми; 8. - прилад, що контролюється (електронний тахеометр); 9. - блок обробки та коментарів результату вимірювань; 10. - блок індикації (дисплей); Пристрій працює за запропонованим способом наступним чином. Попередньо виконують еталонування довжин оптоволоконних кабелів. Для еталонних віддалемірних вимірювань використовують прецизійні світловіддалеміри. Можливий варіант створення спеціального еталонного віддалеміру, який вимірює віддалі з однією частотою (приблизно 100 МГц), що дозволить отримати точність вимірювань, яка достатня для еталонування. Оператор за допомогою дисплея 10, блока 1 та блока 4 вибирає програму імітування віддалей з набору програм, що зберігаються у блоці 5. Після цього блок 4 надсилає електричні сигнали до механізму повороту і фіксації 7.2, який встановлює ромбічну призму 7.1 у відповідні положення (на позиції пристроїв вводу-виводу світлового випромінювання 6.1, 6.3), що передбачені програмою вимірювань і до блока, 9 з інформацією про вибрану програму вимірювань та відповідними інструкціями щодо обробки інформації. Оператор вмикає електронний тахеометр у режим вимірювання віддалі, приймач-передавач якого випромінює світловий сигнал, що проходить через ромбічну призму 7.1, потрапляє до блока 6, відбивається і тим же шляхом повертається до приймача-передавача приладу. Оператор, за допомогою блока 1, надсилає електричний сигнал з результатами вимірювання до блока 2, де він перетворюється в код, аналогічний коду сигналу з еталонним значенням віддалі, що зберігається в блоці 4 (еталонні значення віддалей надходять до блока 4 разом з програмою імітування віддалей). Обидва сигнали (з блока 2 - результат вимірювання віддалі, з блока 4 еталонне значення віддалі) надходять до блока порівняння 3, що виробляє на виході різницевий сигнал, який надходить до блока 9, де виконується обробка інформації і здійснюється вибір повідомлення щодо точності світловіддалеміра електронного тахеометра 8, яке виводиться на дисплей 10. Далі механізм 7.2 послідовно встановлює ромбічну призму 7.1 на відповідних позиціях, а оператор і пристрій виконують всі дії та операції, що описані вище. Таким чином, запропонований спосіб дозволяє автоматично визначати похибки вимірювання віддалей геодезичними світловіддалемірами в лабораторних умовах підвищеною точністю. Джерела інформації: 1. Светодальномеры. Методы и средства поверки. - М.: ЦНИИГАиК, 2003. - 13 с. 2. Базисный прибор БП-1. Методика выполнения измерений контрольных базисов. - М.: ЦНИИГАиК, 2000.-14 с. 3. Шевченко Т. Г. Геодезичні прилади: Підручник / Шевченко Т. Г., Мороз О. I., Тревого I. С; за редакцією Т. Г. Шевченка. - Львів: Видавництво НУ "Львівська політехніка", 2006. - С. 411. 4. Куштин И. Ф. Учебно-практическое пособие. - Μ.: Издательство ПРИОР, 2001. - С. 286288. 50 ФОРМУЛА ВИНАХОДУ 55 Спосіб автоматичного контролю точності геодезичних світловіддалемірів, заснований на вимірюванні світловіддалеміром контрольних базисів та подальшому порівнянні еталонних довжин базисів і отриманих приладом, що контролюється, який відрізняється тим, що світловіддалеміром вимірюють довжини еталонних оптоволоконних кабелів, а отримані значення вводять до обчислювального механізму, який порівнює еталонні значення довжин оптоволоконних кабелів, та отримані за допомогою світловіддалеміра і видає на виході точність приладу. 2 UA 105030 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 3/00
Мітки: світловіддалемірів, спосіб, точності, контролю, автоматичного, геодезичних
Код посилання
<a href="https://ua.patents.su/5-105030-sposib-avtomatichnogo-kontrolyu-tochnosti-geodezichnikh-svitloviddalemiriv.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного контролю точності геодезичних світловіддалемірів</a>
Спосіб автоматичного контролю якості зображення, що створюється об’єктивами геодезичних та аерофотознімальних оптичних систем
Номер патенту: 96554
Опубліковано: 10.11.2011
Автори: Бурачек Всеволод Германович, Хомушко Дмитро Валерійович, Беленок Вадим Юрійович
МПК: G01C 11/00
Мітки: спосіб, аерофотознімальних, зображення, оптичних, автоматичного, якості, створюється, систем, контролю, геодезичних, об'єктивами
Формула / Реферат:
Спосіб автоматичного контролю якості зображення, що створюються об'єктивами геодезичних та аерофотознімальних оптичних систем, заснований на релеєвській інтерпретації оцінки якості оптичної системи, що базується на аналізі зображення двох точкових світних об'єктів, який відрізняється тим, що на екрані проекційного дисплея формують два точкові світні об'єкти з заданим по напрямку вимірювання інтервалом між ними, колімують їх зображення та...
Система автоматичного контролю якості зображення, що створюється об’єктивами геодезичних та аерофотознімальних оптичних систем
Номер патенту: 96553
Опубліковано: 10.11.2011
Автори: Хомушко Дмитро Валерійович, Беленок Вадим Юрійович, Бурачек Всеволод Германович
МПК: G01C 11/00
Мітки: автоматичного, оптичних, аерофотознімальних, якості, зображення, геодезичних, об'єктивами, система, створюється, систем, контролю
Формула / Реферат:
Система автоматизованого контролю якості зображення, що створюється об'єктивами геодезичних та аерофотознімальних оптичних систем, яка містить коліматор з від'ємним блоком стиснення, багатоелементну фотоприймальну матрицю з підсилювачем сигналу, блок індикації, електронні блоки керування, обробки інформації, запису та збереження інформації, об'єктив, що контролюється, з механізмом та датчиком кута повороту, причому система змонтована на...
Спосіб автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні
Номер патенту: 104443
Опубліковано: 10.02.2014
Автори: Хомушко Дмитро Валерійович, Бурачек Всеволод Германович
МПК: G01C 15/00
Мітки: контролю, візирної, автоматичного, зорової, зміщень, осі, приладів, спосіб, перефокусуванні, трубі, горизонтальних, вертикальних, геодезичних
Формула / Реферат:
Спосіб автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні, заснований на спостереженні і фіксуванні зміни взаємного просторового положення зображень індексів, які визначають оптичні осі, контролюючого і контрольованого приладів в єдиній системі світлових променів, що несуть зображення індексів, який відрізняється тим, що оптико-електронно контролюють фокусування...
Пристрій для автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні
Номер патенту: 104444
Опубліковано: 10.02.2014
Автори: Бурачек Всеволод Германович, Хомушко Дмитро Валерійович
МПК: G01C 15/00
Мітки: осі, пристрій, геодезичних, перефокусуванні, приладів, вертикальних, зміщень, трубі, зорової, автоматичного, візирної, контролю, горизонтальних
Формула / Реферат:
Пристрій для автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні, що містить основу та встановлений на ній коліматор, який відрізняється тим, що коліматор обладнаний плоскопаралельною пластиною з напівпрозорим дзеркалом, фотоприймальною матрицею, трипельпризмою з механізмом переміщення її за напрямом оптичної осі коліматора, жорстко закріпленим на основі дзеркалом,...
Спосіб контролю точності положення елементів споруди
Номер патенту: 80875
Опубліковано: 12.11.2007
Автори: Шульц Роман Володимирович, Бурачек Всеволод Германович, Крисенко Максим Вікторович, Боровий Валентин Олександрович, Бойко Ігор Петрович
МПК: G01C 5/00
Мітки: положення, контролю, елементів, спосіб, споруди, точності
Формула / Реферат:
Спосіб контролю положення елементів споруди шляхом фотоелектричного виміру відхилень елементів споруди за допомогою фотоелектричного ланцюжка, утвореного каналами, що містять джерела світла, лінзи-об'єктиви та фотоприймачі, який відрізняється тим, що виміри величин відхилень елементів споруди виконують одночасно не менш ніж у двох однотипних фотоелектричних ланцюжках, в яких суміжні канали працюють у взаємно протилежних напрямках світлового...
Попередній патент: Подвійне націлювання на mir-208 і mir-499 у лікуванні захворювань серця
Наступний патент: Пристрій для автоматичного контролю точності геодезичних світловіддалемірів
Випадковий патент: Спосіб нанесення покриттів залізо-молібден