Система автоматичного контролю якості зображення, що створюється об’єктивами геодезичних та аерофотознімальних оптичних систем
Номер патенту: 96553
Опубліковано: 10.11.2011
Автори: Бурачек Всеволод Германович, Беленок Вадим Юрійович, Хомушко Дмитро Валерійович
Формула / Реферат
Система автоматизованого контролю якості зображення, що створюється об'єктивами геодезичних та аерофотознімальних оптичних систем, яка містить коліматор з від'ємним блоком стиснення, багатоелементну фотоприймальну матрицю з підсилювачем сигналу, блок індикації, електронні блоки керування, обробки інформації, запису та збереження інформації, об'єктив, що контролюється, з механізмом та датчиком кута повороту, причому система змонтована на єдиній основі, яка відрізняється тим, що включає проекційний дисплей, блок формування і регулювання параметрів об'єктів, програмний блок та механізм повороту фотоприймальної матриці, при цьому вихід проекційного дисплея оптично зв'язаний із входом коліматора, а вхід - електрично зв'язаний із виходом блока формування і регулювання параметрів об'єктів, вихід коліматора оптично зв'язаний із входом об'єктива, що контролюється, перший вихід об'єктива, що контролюється, оптично зв'язаний із входом багатоелементної фотоприймальної матриці, другий вихід - механічно зв'язаний із датчиком кута повороту, а вхід - механічно зв'язаний із механізмом повороту, при цьому вхід багатоелементної фотоприймальної матриці механічно зв'язаний із виходом механізму повороту фотоприймальної матриці, перший вхід блока обробки інформації електрично зв'язаний із виходом блока керування, другий вхід - електрично зв'язаний із виходом блока формування і регулювання параметрів об'єктів, третій вхід - електрично зв'язаний із виходом багатоелементної фотоприймальної матриці, четвертий вхід - електрично зв'язаний із виходом датчика кута повороту об'єктива, перший вихід блока обробки інформації електрично зв'язаний із входом блока керування, другий вихід - електрично зв'язаний із входом блока індикації, третій вихід - електрично зв'язаний із входом блока запису та збереження інформації, перший вихід блока керування електрично зв'язаний із входом програмного блока, другий вихід - електрично зв'язаний із блоком формування і регулювання параметрів об'єктів, третій вихід - електрично зв'язаний із входом механізму повороту об'єктива, четвертий вихід - електрично зв'язаний із входом механізму повороту фотоприймальної матриці, а вхід - електрично зв'язаний із виходом програмного блока.
Текст
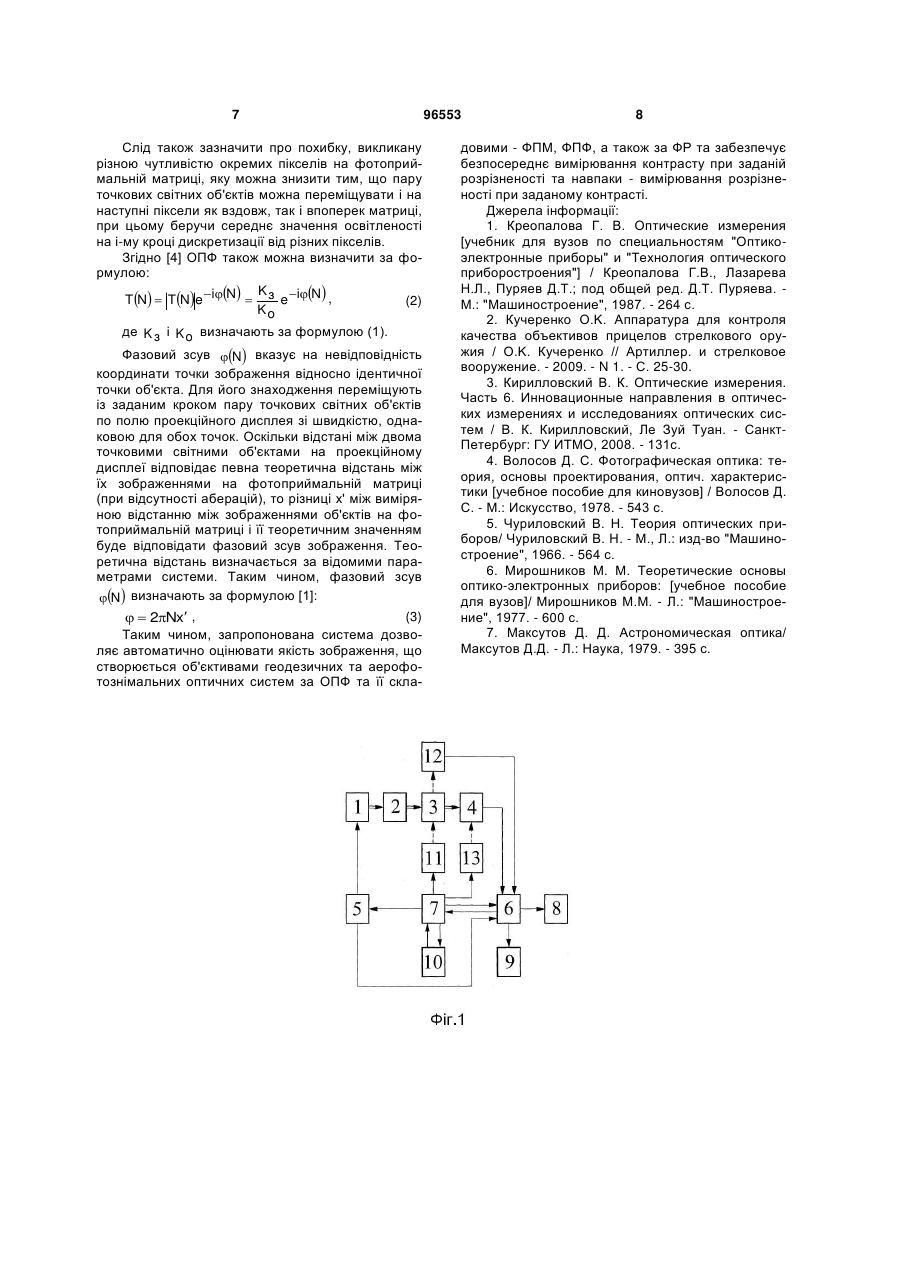
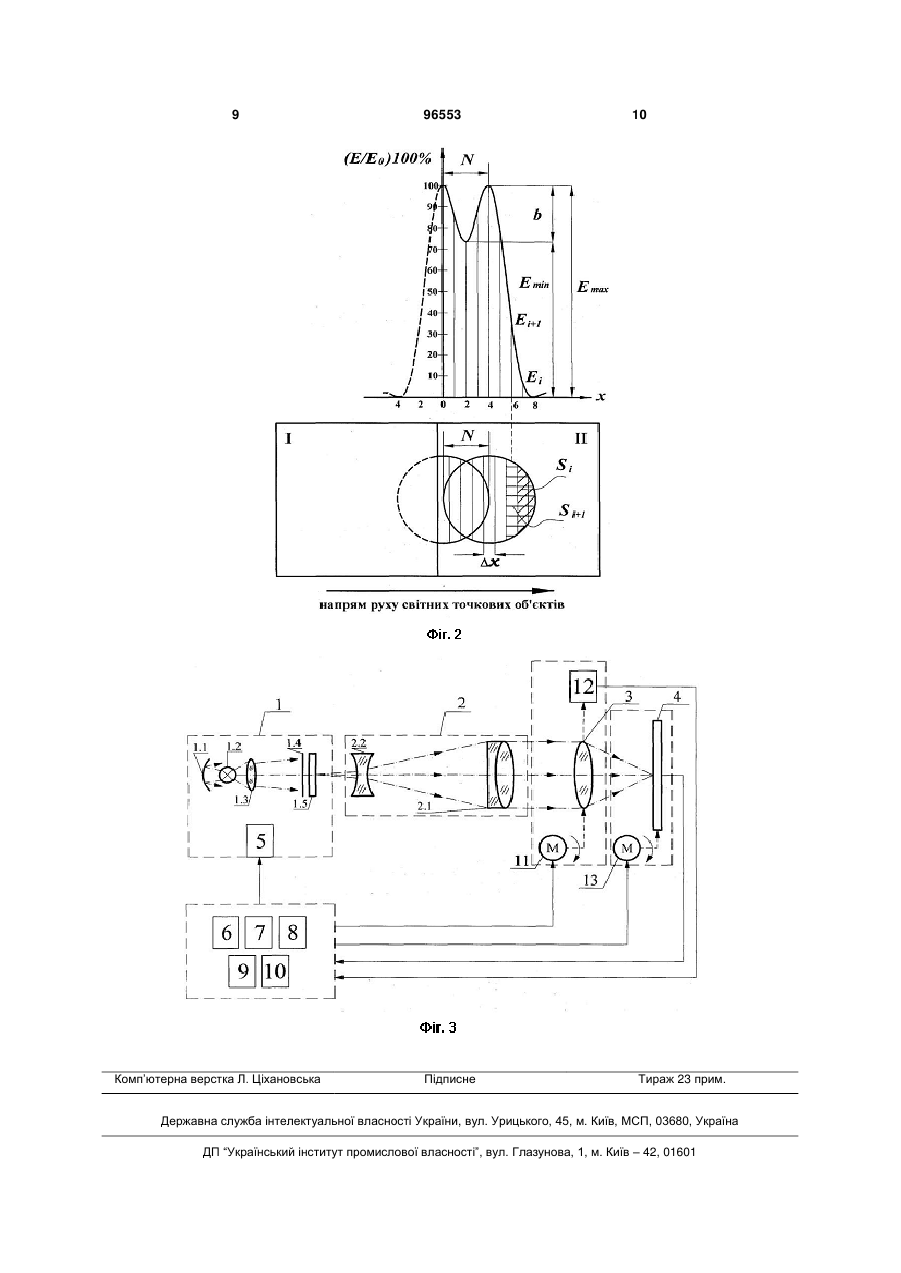
Система автоматизованого контролю якості зображення, що створюється об'єктивами геодезичних та аерофотознімальних оптичних систем, яка містить коліматор з від'ємним блоком стиснення, багатоелементну фотоприймальну матрицю з підсилювачем сигналу, блок індикації, електронні блоки керування, обробки інформації, запису та збереження інформації, об'єктив, що контролюється, з механізмом та датчиком кута повороту, причому система змонтована на єдиній основі, яка відрізняється тим, що включає проекційний дисплей, блок формування і регулювання параметрів C2 2 UA 1 3 дить через маски (аналізатори), функція пропускання яких змінюється за синусоїдальним законом з різними просторовими частотами [1]. Недоліком відомого пристрою є складність та трудомісткість виготовлення прямокутних, синусоїдальних мір методом гравірування, що призводить до зниження точності вимірювань, а застосування мір не є перспективним в аспекті підвищення точності вимірювань. Наявність у пристрої, за допомогою якого реалізуються зазначений спосіб, складних механічних рухомих вузлів унеможливлює автоматизацію вимірювань. Як аналог, вибраний за прототип, можна прийняти пристрій, який реалізує спосіб комп'ютерної ізофотометрії функції розсіювання точки (ФРТ) зі змінним часом накопичення, заснований на проектуванні зображення світного точкового об'єкта, яке сформоване об'єктивом, що контролюється, на фотоприймальну матрицю (наприклад, пристрій із зарядовим зв'язком - ПЗЗ-матрицю) з подальшим визначенням ФРТ. Отримана ФРТ використовується для оцінки якості зображення або для визначення одного з відомих критеріїв оцінки якості [3]. Недоліком цього пристрою є те, що він не передбачає вимірювання розрізненості при заданому контрасті та навпаки, контрасту при заданій розрізненості. Задачею винаходу є створення системи, що дозволяє автоматично оцінювати якість зображення, що створюється об'єктивами геодезичних та аерофотознімальних оптичних систем за ОПФ та її складовими - ФПМ і ФПФ, а також ФР та забезпечує безпосереднє вимірювання контрасту при заданій розрізненості та навпаки, вимірювання розрізненості при заданому контрасті. Поставлена задача вирішується за рахунок створення системи автоматизованого контролю якості зображення, що створюється об'єктивами геодезичних та аерофотознімальних оптичних систем, яка містить коліматор з від'ємним блоком cтиснення, багатоелементну фотоприймальну матрицю з підсилювачем сигналу, блок індикації, електронні блоки керування, обробки інформації, запису та збереження інформації, об'єктив, що контролюється, з механізмом та датчиком кута повороту, причому система змонтована на єдиній основі. Новим є те, що система включає в себе проекційний дисплей, блок формування і регулювання параметрів об'єктів, програмний блок та механізм повороту фотоприймальної матриці, при цьому вихід проекційного дисплея оптично зв'язаний із входом коліматора, а вхід - електрично зв'язаний із виходом блока формування і регулювання параметрів об'єктів; вихід коліматора оптично зв'язаний із входом об'єктива, що контролюється; перший вихід об'єктива, що контролюється, оптично зв'язаний із входом багатоелементної фотоприймальної матриці, другий вихід - механічно зв'язаний із датчиком кута повороту, а вхід - механічно зв'язаний із механізмом повороту; вхід багатоелементної фотоприймальної матриці механічно зв'язаний із виходом механізму повороту фотоприймальної матриці; перший вхід блока обробки інформації електрично зв'язаний із виходом блока 96553 4 керування, другий вхід - електрично зв'язаний із виходом блока формування і регулювання параметрів об'єктів, третій вхід - електрично зв'язаний із виходом багатоелементної фотоприймальної матриці, четвертий вхід - електрично зв'язаний із виходом датчика кута повороту об'єктива, перший вихід блока обробки інформації електрично зв'язаний із входом блока керування, другий вихід електрично зв'язаний із входом блока індикації, третій вихід - електрично зв'язаний із входом блока запису та збереження інформації; перший вихід блока керування електрично зв'язаний із входом програмного блока, другий вихід - електрично зв'язаний із блоком формування і регулювання параметрів об'єктів, третій вихід - електрично зв'язаний із входом механізму повороту об'єктива, четвертий вихід - електрично зв'язаний із входом механізму повороту фотоприймальної матриці, а вхід - електрично зв'язаний із виходом програмного блока. Технічним результатом є можливість автоматично оцінювати якість зображення, що створюється об'єктивами геодезичних та аерофотознімальних оптичних систем за ОПФ та її складовими ФПМ, ФПФ, а також ФР та вимірювати контраст при заданій розрізненості та навпаки, вимірювати розрізненість при заданому контрасті. Схема запропонованої системи представлена на фіг.1. На схемі відповідними цифрами позначено: 1 - проекційний дисплей; 2 - коліматор з від'ємним блоком стиснення; 3 - об'єктив, що контролюється; 4 - багатоелементна фотоприймальна матриця з підсилювачем сигналу; 5 - блок формування і регулювання параметрів об'єктів; 6 - блок обробки інформації; 7 - блок керування; 8 - блок індикації (дисплей); 9 - блок запису та збереження інформації; 10 - програмний блок; 11 - механізм повороту об'єктива; 12 - датчик кута повороту об'єктива; 13 - механізм повороту фотоприймальної матриці. Проекційний дисплей 1, коліматор 2 і об'єктив 3, що контролюється, встановлені співвісно на стабільній основі. На фіг.1 подвійними стрілками позначені оптичні зв'язки, одинарними суцільними - електричні, а одинарними штрих-пунктирними механічні. Система працює наступним чином. Блок 7 вибирає з блока 10 відповідну програму досліджень і надсилає сигнали в блоки 5, 6, 11, 13. Блок 5 формує і направляє до проекційного дисплея 1 електричні сигнали рухомих пар точкових світних об'єктів, при цьому задають програмно (в залежності від вибраної в блоці 10 програми досліджень) форму точкових світних об'єктів (точка або штрих), відстань між точковими світними об'єктами (просторову частоту N ), величину яскравості фону, кут повороту, зміну їх швидкості і напряму переміщення на екрані проекційного дисплея 1; інформація про встановлені параметри передається до блока 6. Блок 6 отримує необхідну інфо 5 96553 рмацію про програму досліджень, яка потім використовується при оцінці якості зображення, яке створюється об'єктивом, що контролюється. Блок 11 повертає об'єктив 3 на відповідний кут, значення якого вимірюється блоком 12 та надсилається до блока 6. Блок 13 повертає фотоприймальну матрицю 4 на кут, який відповідає напряму переміщення точкових світних об'єктів на проекційному дисплеї. Світлові сигнали від блока 1 надходять у коліматор 2, де зображення колімується і потім, проходячи через об'єктив 3, подається на фотоприймальну матрицю 4. Механізм повороту 11 використовується для визначення оптичних характеристик різних точок поля об'єктива, що контролюється. Зображення пари точкових світних об'єктів переміщують перпендикулярно лінії поділу фотоелементів з мінімальним кроком дискретизації x проекційного дисплея. При перетині на матриці 4 зображенням точкових світних об'єктів границі між сусідніми пікселами в блок 6 надходять електричні сигнали від пікселів, при цьому на кожному кроці обчислюють величину зміни освітленості світлового сигналу на елементах фотоприймача як різницю між виміряними значеннями освітленості на кожному пікселі на і-му та (і+1)-му кроці дискретизації (фіг.2). При накопиченні в блоці 6 необхідної інформації, в ньому проводяться розрахунки, результати яких надходять до блока 9, де вони зберігаються, та до блока індикації 8, з якого оператор візуально зчитує інформацію про виконане дослідження. Після закінчення вимірювань блок 6 надсилає в блок 7 інформацію про результати виконаних вимірювань. На першому кроці дискретизації ордината (величина освітленості E1 ) вимірюється безпосередньо як величина засвічування піксела, а наступні значення освітленості обчислюються відносно попередніх значень за вимірюваними площами засвічування наступним чином: Ei1 ESi1 ESi , де ESi1 і ESi - величини освітленості площ засвічування пікселів фотоприймальної матриці на i-му та (i+1)-му кроках дискретизації при переміщенні зображення точкового об'єкта; i номер кроку дискретизації, i 1 n , n - кількість , кроків дискретизації. Зазначимо також - якщо сигнал від точкового світного об'єкта більше розміру піксела на фотоприймальній матриці, то пікселі можна об'єднати в групи програмно. Таким чином отримують значення освітленості від окремих частин дифракційної плями. ФР знаходять в блоці 6 диференціюванням функції розподілу освітленості; застосувавши перетворення Фур'є до ФР, отримують ОПФ. На фіг.3 показано функціональну схему системи, де штрих-пунктирними стрілками з крапками позначені оптичні зв'язки, суцільними - електричні, а штрих-пунктирними - механічні. Проекційний дисплей 1 складається з рефлектора 1.1, джерела світла 1.2, конденсора 1.3, скляної захисної пластини 1.4 та ПЗЗ-матриці 1.5, 6 що знаходиться у фокальнійплощині коліматора 2.1, який містить від'ємний блок стиснення 2.2. Об'єктив 3 та фотоприймальна матриця 4, яка знаходиться в її фокальній площині, встановлюються в утримувачі і повертаються механізмами повороту 11 і 13 відповідно. Запропонована система дозволяє вимірювати роздільну здатність при заданому значенні контрасту та значення контрасту при заданій роздільній здатності. Контраст (зображення K з , об'єкта К о ) визначається за відомою формулою [1,4]: Emax Emin K з E max Emin , (1) Lmax Lmin K o Lmax Lmin де Emax і Emin - максимальна і мінімальна освітленість у площині зображення; Lmax і Lmin максимальна і мінімальна яскравість у площині об'єкта. Контраст об'єкта К о визначають за значеннями Lmax та Lmin , які задають програмно, шляхом встановлення величин яскравості точкових об'єктів та фону на матриці проекційного дисплея. Для визначення Emin блок обробки інформації 6 порівнює значення освітленості від кожного піксела на двох послідовних кроках дискретизації: точка, при переході через яку відбувається зміна монотонного спадання освітленості на зростання (в малому колі цієї точки, що відповідає малому кроку дискретизації, значення освітленості є більшим, ніж в цій точці) буде мати мінімальне значення освітленості Emin . Так само знаходимо Emax , як значення освітленості в точці, при переході через яку відбувається зміна монотонного зростання освітленості на спадання. За отриманими значеннями Emax і Emin знайдемо шукане значення контрасту зображення за формулою (1). Для визначення розрізненості об'єктива при заданому значенні контрасту (який задається зміною яскравості фону) формують на проекційному дисплеї зображення двох точкових світних об'єктів, які розташовані таким чином, що їх площі накладаються. На фотоприймальній матриці матимемо відповідне зображення пари точок, відстань між центрами яких вимірюють. Ці точки переміщують перпендикулярно лінії поділу фотоелементів з мінімальним кроком дискретизації проекційного дисплея. Від зображення двох світних точок отримують графік функції освітленості, який характеризується двома максимумами, що відповідають центрам кіл Ері двох точок, та спадаючою кривою між максимумами (фіг.2). Про розрізненість об'єктива судять по відстані N між максимумами та по спадаючій кривій між ними (глибині сідловини b) [5]. Контраст зображення та розрізненість обчислюються блоком обробки інформації 6, з якого вони надходять в блок індикації 8 та блок запису та збереження інформації 9. 7 Слід також зазначити про похибку, викликану різною чутливістю окремих пікселів на фотоприймальній матриці, яку можна знизити тим, що пару точкових світних об'єктів можна переміщувати і на наступні піксели як вздовж, так і впоперек матриці, при цьому беручи середнє значення освітленості на і-му кроці дискретизації від різних пікселів. Згідно [4] ОПФ також можна визначити за формулою: K T N T N e iN з e iN , (2) Ko де K з і K o визначають за формулою (1). Фазовий зсув N вказує на невідповідність координати точки зображення відносно ідентичної точки об'єкта. Для його знаходження переміщують із заданим кроком пару точкових світних об'єктів по полю проекційного дисплея зі швидкістю, однаковою для обох точок. Оскільки відстані між двома точковими світними об'єктами на проекційному дисплеї відповідає певна теоретична відстань між їх зображеннями на фотоприймальній матриці (при відсутності аберацій), то різниці x' між виміряною відстанню між зображеннями об'єктів на фотоприймальній матриці і її теоретичним значенням буде відповідати фазовий зсув зображення. Теоретична відстань визначається за відомими параметрами системи. Таким чином, фазовий зсув N визначають за формулою [1]: (3) 2Nx , Таким чином, запропонована система дозволяє автоматично оцінювати якість зображення, що створюється об'єктивами геодезичних та аерофотознімальних оптичних систем за ОПФ та її скла 96553 8 довими - ФПМ, ФПФ, а також за ФР та забезпечує безпосереднє вимірювання контрасту при заданій розрізненості та навпаки - вимірювання розрізненості при заданому контрасті. Джерела інформації: 1. Креопалова Г. В. Оптические измерения [учебник для вузов по специальностям "Оптикоэлектронные приборы" и "Технология оптического приборостроения"] / Креопалова Г.В., Лазарева Н.Л., Пуряев Д.Т.; под общей ред. Д.Т. Пуряева. М.: "Машиностроение", 1987. - 264 с. 2. Кучеренко O.K. Аппаратура для контроля качества объективов прицелов стрелкового оружия / O.K. Кучеренко // Артиллер. и стрелковое вооружение. - 2009. - N 1. - С. 25-30. 3. Кирилловский В. К. Оптические измерения. Часть 6. Инновационные направления в оптических измерениях и исследованиях оптических систем / В. К. Кирилловский, Ле Зуй Туан. - СанктПетербург: ГУ ИТМО, 2008. - 131с. 4. Волосов Д. С. Фотографическая оптика: теория, основы проектирования, оптич. характеристики [учебное пособие для киновузов] / Волосов Д. С. - М.: Искусство, 1978. - 543 с. 5. Чуриловский В. Н. Теория оптических приборов/ Чуриловский В. Н. - М., Л.: изд-во "Машиностроение", 1966. - 564 с. 6. Мирошников М. М. Теоретические основы оптико-электронных приборов: [учебное пособие для вузов]/ Мирошников М.М. - Л.: "Машиностроение", 1977. - 600 с. 7. Максутов Д. Д. Астрономическая оптика/ Максутов Д.Д. - Л.: Наука, 1979. - 395 с. 9 Комп’ютерна верстка Л. Ціхановська 96553 Підписне 10 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for automated control of brightness of image that is formed with objectives of geodesic and air-survey optical systems
Автори англійськоюBelenok Vadym Yuriiovych, Burachek Vsevolod Hermanovych, Khomushko Dmytro Valeriiovych
Назва патенту російськоюСистема автоматического контроля качества изображения, которое создается объективами геодезических и аэрофотосъемочных оптических систем
Автори російськоюБеленок Вадим Юрьевич, Бурачек Всеволод Германович, Хомушко Дмитрий Валериевич
МПК / Мітки
МПК: G01C 11/00
Мітки: система, автоматичного, зображення, об'єктивами, аерофотознімальних, систем, створюється, оптичних, геодезичних, якості, контролю
Код посилання
<a href="https://ua.patents.su/5-96553-sistema-avtomatichnogo-kontrolyu-yakosti-zobrazhennya-shho-stvoryuehtsya-obehktivami-geodezichnikh-ta-aerofotoznimalnikh-optichnikh-sistem.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного контролю якості зображення, що створюється об’єктивами геодезичних та аерофотознімальних оптичних систем</a>
Спосіб автоматичного контролю за допомогою оптоелектронного пристрою якості друкування зображення на папері
Номер патенту: 34486
Опубліковано: 15.03.2001
Автор: Стрінга Луіджи
МПК: B41F 33/00, B41M 3/14, B41L 39/00
Мітки: спосіб, оптоелектронного, пристрою, зображення, автоматичного, папері, контролю, допомогою, друкування, якості
Текст:
...раз личных рисун ков, взаимные положения которых о тличаются. Фиг. 3 изображает схему уста новки для осуществления способа. На фиг. 1 представлено изображение, состоящее из одного треугольника Т1 и одного прямоугольника R1. Каждый из указанных рисун ков был отпечатан во время одной отдельной фазы печатания, например, треугольник был отпечатан с использованием офсетной печати, а прямоугольник был получен с использованием печатания...
Інтелектуальна система тренажерного навчання геодезичних вимірів
Номер патенту: 95319
Опубліковано: 25.07.2011
Автори: Бурачек Всеволод Германович, Хомушко Дмитро Валерійович, Зацерковний Віталій Іванович, Коледа Олеся Дмитрівна, Параніч Віктор Петрович
МПК: G09B 19/00
Мітки: тренажерного, геодезичних, система, навчання, інтелектуальна, вимірів
Формула / Реферат:
Інтелектуальна система тренажерного навчання геодезичних вимірів, що містить імітатор візуальної візирної картини, блок введення даних, з'єднаний з першим входом блока аналізу та порівняння даних, один вихід якого безпосередньо, а дугий через блок навчальних коментарів з'єднані з інформаційним дисплеєм, та програмний блок, яка відрізняється тим, що в неї додатково введені блок вибору виду та класу вимірів (БВВКВ), блок випадкового вибору...
Спосіб одержання еталонної моделі для автоматичного контролю якості друкування зображення на папері
Номер патенту: 45320
Опубліковано: 15.04.2002
Автор: Стрінга Луіджи
МПК: B41F 33/14, B41F 33/00, G06T 7/00, G06T 1/00
Мітки: друкування, автоматичного, спосіб, контролю, зображення, папері, еталонної, моделі, якості, одержання
Формула / Реферат:
1. Способ получения при помощи электронных средств эталонной модели для использования при автоматическом контроле качества печати изображения на бумаге, составленного из рисунков, отпечатанных, по меньшей мере, в двух фазах печати, отличных друг от друга, например при контроле качества печати ценных бумаг, заключающийся в подготовке группы изображений, полностью отпечатанных при помощи средств и способов, используемых при серийной печати...
Спосіб автоматичного контролю якості друку багатоколірного зображення та установка для здійснення способу
Номер патенту: 44738
Опубліковано: 15.03.2002
Автор: Стрінга Луіджи
МПК: G06T 1/00, H04N 7/18, G07D 7/12, G07D 7/20, B41F 33/00, G07D 7/00
Мітки: установка, друку, якості, способу, багатоколірного, спосіб, здійснення, зображення, контролю, автоматичного
Формула / Реферат:
1. Способ автоматического контроля качества печати многоцветного изображения посредством по меньшей мере одного оптоэлектронного устройства для получения сигнала Si в каждом цветовом канале, отличающийся тем, что осуществляют комбинирование сигналов Si, полученных для одного и того же изображения или части этого изображения, для формирования одного единственного сигнала, передают сформированный сигнал в устройство обработки сигнала для...
Система завантаження та контролю роботи узагальнених виробничих систем складання
Номер патенту: 39621
Опубліковано: 10.03.2009
Автори: Філіппова Марина В`ячеславівна, Філіппов Олексій В'ячеславович, Діордіца Анна Миколаївна, Волошко Оксана В'ячеславівна, Діордіца Ірина Миколаївна, Вислоух Сергій Петрович
МПК: B23Q 41/08
Мітки: завантаження, систем, система, виробничих, контролю, узагальнених, складання, роботи
Формула / Реферат:
Система завантаження узагальнених виробничих систем складання, що містить блок оператора, вхід якого підключено до виходу блока інформації про виробничі завдання, а вихід - до входу блока інтелектуального керування оптимальним технологічним процесом, який має зв'язок вхід - вихід з базою знань та блоком вибору оптимального технологічного процесу відповідно, блок узагальненої виробничої системи, вихід якого підключено до входу блока готових...
Попередній патент: Спосіб одержання порошків на основі твердих розчинів заміщення (y1-хndx )2o3 (x=0,005-0,1)
Наступний патент: Спосіб автоматичного контролю якості зображення, що створюється об’єктивами геодезичних та аерофотознімальних оптичних систем
Випадковий патент: Щітка-фреза