Ваги грейферні для навантажувача-перевантажувача
Номер патенту: 105725
Опубліковано: 11.04.2016
Автори: Бугаєнко Георгій Якович, Бугаєнко Максим Георгійович, Бугаєнко Єгор Георгійович
Формула / Реферат
Ваги грейферні для навантажувача-перевантажувача, що мають у своєму складі вантажо-приймальний пристрій, контролер тензодатчиків та вагопроцесор, при цьому вантажоприймальний пристрій складається з верхньої вилки та нижньої вилки, між якими встановлений тензодатчик та контролера тензодатчика, а вагопроцесор має в своєму складі мікропроцесорний контролер, індикатор цифровий та приймально-передавальний пристрій, який по радіоканалу з'єднаний з контролером тензодатчика, які відрізняються тим, що до складу вантажоприймального пристрою введений другий тензодатчик, який також встановлений між верхньою вилкою та нижньою вилкою симетрично відносно повздовжньої площини симетрії з першим тензодатчиком, а у склад контролера тензодатчиків введений суматор сигналів тензодатчиків, на входи якого підведені виходи обох тензодатчиків.
Текст
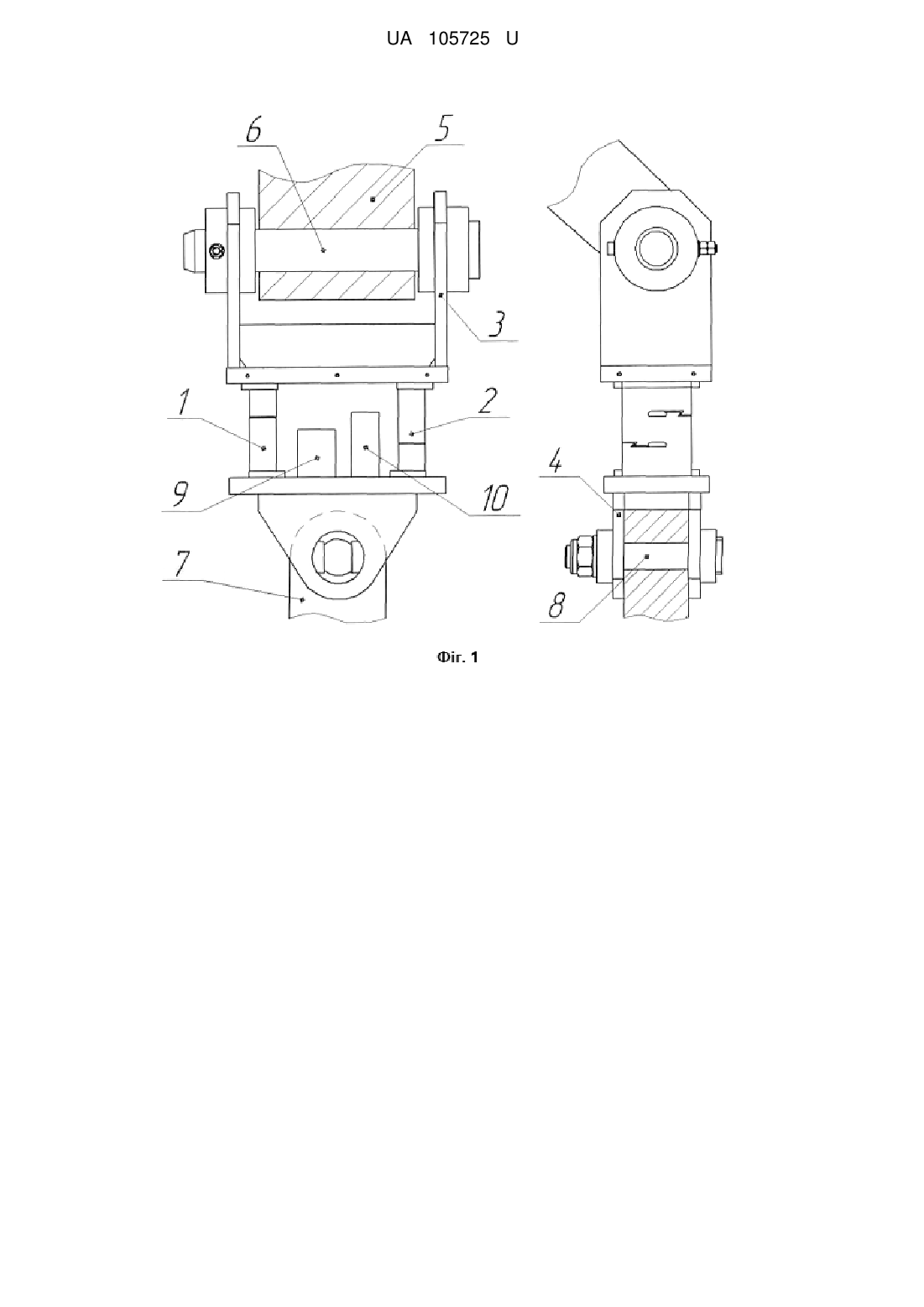
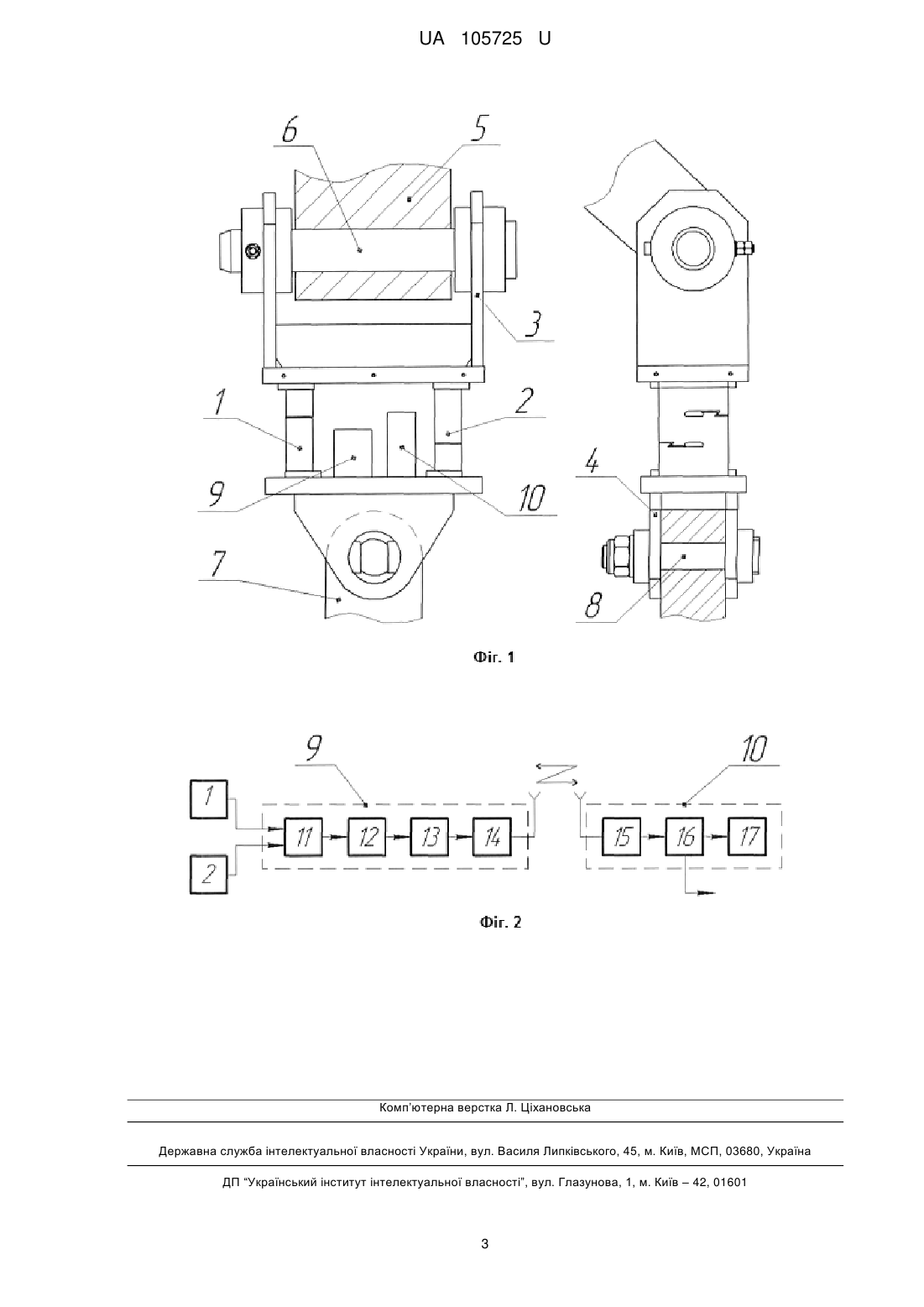
Реферат: Ваги грейферні для навантажувача-перевантажувача мають у своєму складі вантажоприймальний пристрій, контролер тензодатчиків та вагопроцесор. Вантажоприймальний пристрій складається з верхньої вилки та нижньої вилки, між якими встановлений тензодатчик та контролера тензодатчика, а вагопроцесор має в своєму складі мікропроцесорний контролер, індикатор цифровий та приймально-передавальний пристрій, який по радіоканалу з'єднаний з контролером тензодатчика. До складу вантажоприймального пристрою введений другий тензодатчик, який також встановлений між верхньою вилкою та нижньою вилкою симетрично відносно повздовжньої площини симетрії з першим тензодатчиком. У склад контролера тензодатчиків введений суматор сигналів тензодатчиків, на входи якого підведені виходи обох тензодатчиків. UA 105725 U (12) UA 105725 U UA 105725 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до ваговимірювальної техніки, а саме пристроїв для зважування вантажів, що підіймаються за допомогою гідравлічного грейфера, який встановлений на навантажувач-перевантажувач. Найбільш близькими до заявлюваних ваг є ваги, що випускає фірма Intermercato (Швеція), які мають вантажоприймальний пристрій, контролер тензодатчика і термінал ваговий мікропроцесорний, при цьому вантажоприймальний пристрій складається з верхньої та нижньої вилки, між якими встановлений тензодатчик, контролер тензодатчика має у своєму складі аналого-цифровий перетворювач, мікропроцесорний контролер і приймально-передавальний пристрій, а термінал ваговий мікропроцесорний складається з мікропроцесорного контролера, індикатора цифрового, енергонезалежної пам'яті та приймально-передавального пристрою, який по радіоканалу з'єднаний з контролером тензодатчика. Недоліком прототипу є недостатня міцність конструкції вантажоприймального пристрою та недостатня точність вимірювання маси вантажу, який підіймає грейфер. В основу корисної моделі поставлена задача вдосконалення ваги, в якій забезпечується підвищення міцності вантажоприймального пристрою та покращення їх точності. Поставлена задача вирішується тим, що в грейферні ваги, що мають вантажоприймальний пристрій, який складається з верхньої та нижньої вилки, між якими встановлений тензодатчик, контролера тензодатчиків, який має у своєму складі аналого-цифровий перетворювач, мікропроцесорний контролер і приймально-передавальний пристрій, та термінал ваговий мікропроцесорний, який складається з мікропроцесорного контролера, індикатора цифрового, енергонезалежної пам'яті та приймально-передавального пристрою, який по радіоканалу з'єднаний з контролером тензодатчиків, згідно з корисною моделлю, введений другий датчик, який також встановлений між верхньою скобою та нижньою вилкою скобою та разом з першим встановлений симетрично відносно вертикальної осі ваг, а у склад контролера тензодатчиків введений суматор сигналів тензодатчиків, на входи якого підведені виходи обох тензодатчиків, а вихід якого підключений до входу мікропроцесорного контролера тензодатчиків. Причинно-наслідковий зв'язок полягає в тому, що із-за встановлення у вантажоприймальному пристрої двох тензодатчиків, а у контролері тензодатчиків суматора сигналів тензодатчиків конструкція ваг стає більш міцною, робота ваг стає більш надійною, а показники точності більш високими. Суть запропонованої корисної моделі пояснюється на кресленнях, де: Фіг. 1 - загальний вигляд вантажоприймального пристрою грейферних ваг, Фіг. 2 - структурна схема грейферної ваги. Конструкція вантажоприймального пристрою наведена на Фіг. 1. Вантажоприймальний пристрій містять два тензометричних датчики 1 і 2, що закріплені між верхньою вилкою 3 і нижньою вилкою 4. Верхня вилка 3 підвішена до стріли 5 навантажувача-перевантажувача через вісь 6, а грейфер 7 підвішено до вантажоприймального пристрою через нижню вісь 8. Між датчиками 1 та 2 встановлено контролер 9 тензодатчиків та вагопроцесор 10, який забезпечує контролер 9 енергоживленням. Структурна електрична схема ваги складається з тензодатчиків 1 та 2, контролера 9 тензодатчиків та вагопроцесора 10. Контролер 9 тензодатчиків має в своєму складі суматор 11, аналого-цифровий перетворювач 12, мікропроцесорний контролер 13 та приймальнопередавальний пристрій 14. Вагопроцесор 10 має в своєму складі приймально-передавальний пристрій 15, мікропроцесорний контролер 16 та індикатор 17. Виходи кожного з тензодатчиків 1 та 2 підключені до входів суматора 11, вихід суматора 11 підведений до входу приймальнопередавального пристрою 14. Грейферні ваги працюють наступним чином. Після повного відриву грейфера від опори все навантаження від маси вантажу та маси грейфера спрямоване на тензодатчики 1 та 2. Контролер безперервно перетворює сигнали від тензодатчиків у цифровий код, який передається по радіоканалу у термінал. Термінал виконує обробку сигналів датчиків та фіксує її на дисплеї термінала, а також записує у енергонезалежну пам'ять термінала. Грейфер переміщається до місця вивантаження та вивантажує вантаж. Маса самого грейфера (ТАРА) віднімається від маси грейфера з вантажем (БРУТТО) та таким чином обчислюється маса НЕТТО вантажу, яка і відображається на індикаторі 16 вагопроцесора ваги. Перевагою грейферної ваги, що пропонується, є те, що конструкція ваг стала більш міцною внаслідок того, що між верхньою та нижньою вилками встановлено два тензодатчики замість одного, які разом з вилками створили силовий паралелепіпед, який має більшу міцність, чим Тподібна силова конструкція, яка створена з двох вилок і одного тензодатчика між ними. 1 UA 105725 U 5 10 15 20 25 30 35 Перевагою грейферної ваги, що пропонується, є те, що робота ваг стала більш надійною, тому що ймовірність виходу з ладу більш міцної конструкції менша, ніж у конструкції, яка має меншу міцність. Перевагою грейферної ваги, що пропонується, є також те, що показники точності стали більш високими, тому що похибка вимірювання δ n, як відомо, (див. п. 4.12.3 ДСТУ EN 45501:07 "Прилади неавтоматичні зважувальні. Загальні технічні вимоги та методи випробувань"), зменшується при збільшенні кількості тензодатчиків, у відповідності з формулою n n. Таким чином, у випадку застосування двох тензодатчиків, точність вимірювання збільшується у 1,4 разу. Викладене вище підтверджує наявність причинно-наслідкових зв'язків між сукупністю суттєвих ознак корисної моделі, що заявляється, та технічним результатом, що досягається. Дана сукупність суттєвих ознак дозволяє, в порівнянні з прототипом, забезпечити більшу міцність конструкції, при цьому робота ваг стає більш надійною, а показники точності більш високими. На думку автора, технічне рішення, що заявляється, відповідає критерію "новизна", тому що сукупність суттєвих ознак, які характеризують грейферні ваги, які заявляються, є новою. На думку автора, технічне рішення, що заявляється, відповідає критерію "корисний ефект", тому що сукупність суттєвих ознак, які характеризують грейферні ваги, які заявляються, забезпечує більшу міцність конструкції, а сама робота ваг стає більш надійною, при цьому показники точності за рахунок виміру зусилля двома тензодатчиками стає більш високими. Пропонований пристрій введений в експлуатацію на перевантажувачі, який працює на одному з підприємств м. Умані Черкаської області. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Ваги грейферні для навантажувача-перевантажувача, що мають у своєму складі вантажоприймальний пристрій, контролер тензодатчиків та вагопроцесор, при цьому вантажоприймальний пристрій складається з верхньої вилки та нижньої вилки, між якими встановлений тензодатчик та контролера тензодатчика, а вагопроцесор має в своєму складі мікропроцесорний контролер, індикатор цифровий та приймально-передавальний пристрій, який по радіоканалу з'єднаний з контролером тензодатчика, які відрізняються тим, що до складу вантажоприймального пристрою введений другий тензодатчик, який також встановлений між верхньою вилкою та нижньою вилкою симетрично відносно повздовжньої площини симетрії з першим тензодатчиком, а у склад контролера тензодатчиків введений суматор сигналів тензодатчиків, на входи якого підведені виходи обох тензодатчиків. 2 UA 105725 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюLoader-unloader bucket scales
Автори англійськоюBuhaienko Heorhii Yakovych, Buhaienko Yehor Heorhiiovych, Buhaienko Maksym Heorhiiovych
Назва патенту російськоюВесы грейферные для погрузчика- перегружателя
Автори російськоюБугаенко Георгий Яковлевич, Бугаенко Егор Георгиевич, Бугаенко Максим Георгиевич
МПК / Мітки
МПК: G01G 19/14, B66C 13/16
Мітки: навантажувача-перевантажувача, ваги, грейферні
Код посилання
<a href="https://ua.patents.su/5-105725-vagi-grejjferni-dlya-navantazhuvacha-perevantazhuvacha.html" target="_blank" rel="follow" title="База патентів України">Ваги грейферні для навантажувача-перевантажувача</a>
Грейферні ваги
Номер патенту: 47902
Опубліковано: 25.02.2010
Автори: Бугаєнко Георгій Якович, Бугаєнко Єгор Георгійович, Лошкарьов Валерій Іванович, Бугаєнко Максим Георгійович
МПК: G01G 19/00
Формула / Реферат:
Грейферні ваги, які вмонтовані в ланцюги вантажних замикальних канатів та мають у своєму складі два захисних корпуси, в які встановлені силовимірювальні датчики з закріпленими на них верхніми та ніжними вилками, та захисний корпус, в який вмонтований вторинний вимірювальний пристрій, які відрізняються тим, що до їх складу введені еластичні шарніри, які з'єднують захисні корпуси датчиків та захисний корпус вторинного вимірювального пристрою,...
Ваги вагонні з визначенням відхилень центра ваги вагона
Номер патенту: 47685
Опубліковано: 25.02.2010
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/00
Мітки: вагона, ваги, визначенням, центра, відхилень, вагонні
Формула / Реферат:
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, встановлені по кутах платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, введені чотири суматори,...
Автоматичні бункерні ваги для сипких матеріалів
Номер патенту: 80942
Опубліковано: 26.11.2007
Автори: Браз Давид Леонідович, Соболєв Костянтин Андрійович, Кулик Сергій Федорович, Альтман Ілля Аронович
МПК: G01G 13/00
Мітки: бункерні, матеріалів, сипких, автоматичні, ваги
Формула / Реферат:
Автоматичні бункерні ваги, що містять опорну раму, жорстко закріплений на опорній рамі накопичувальний бункер, розташований під ним по вертикалі жорстко закріплений на опорній рамі формуючий бункер, розташований між накопичувальним і формуючим бункерами ваговий бункер з ваговим механізмом, електронний блок з контролером для управління затворами бункерів, які відрізняються тим, що ваговий механізм вимірювального бункера виконаний у вигляді...
Ваги вагонні з визначенням відхилень центра ваги вагона
Номер патенту: 75619
Опубліковано: 10.12.2012
Автор: Полуектов Дмитро Володимирович
МПК: G01G 19/00, G01G 19/04, G01G 19/02
Мітки: визначенням, вагонні, відхилень, центра, вагона, ваги
Формула / Реферат:
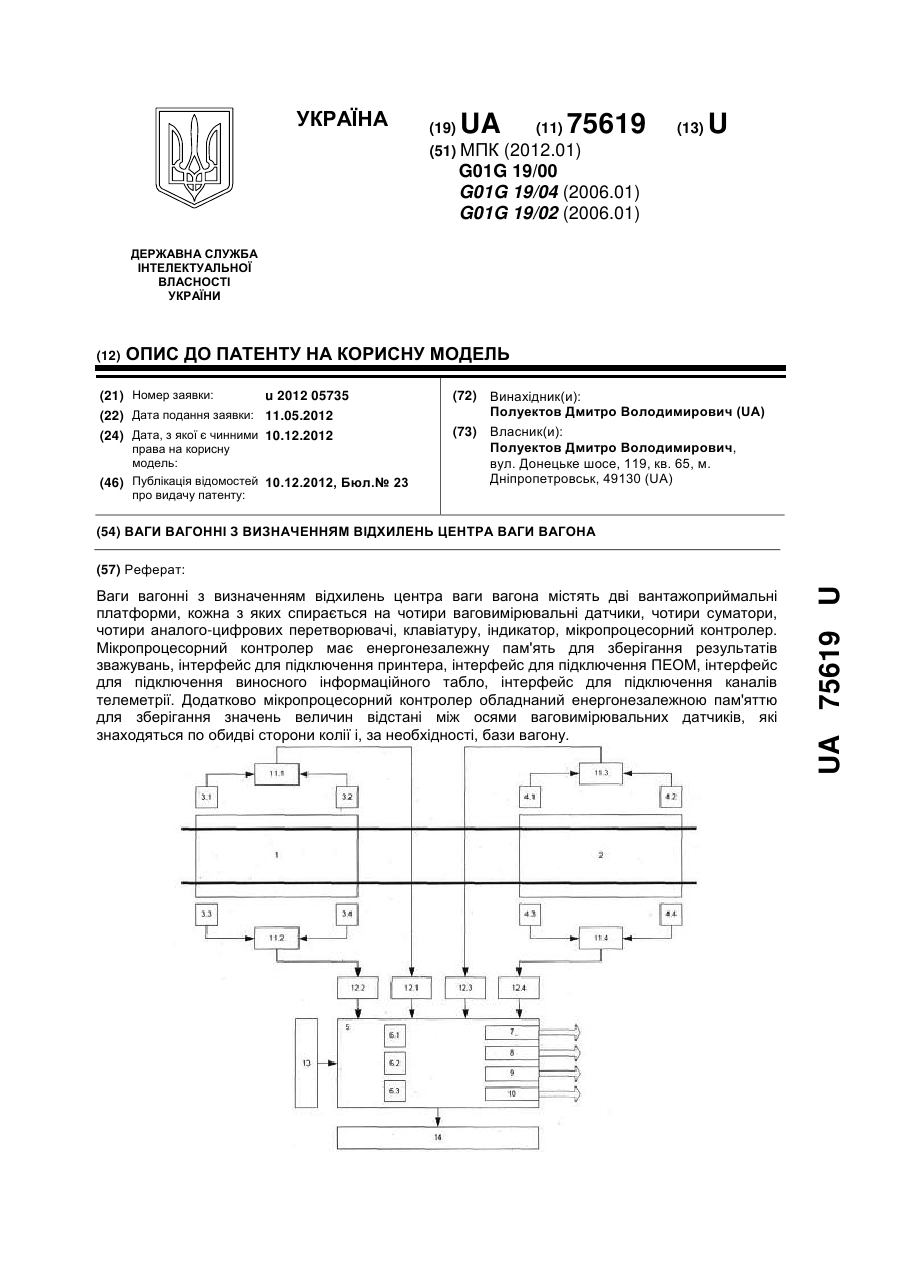
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, що встановлені по кутах платформ, чотири суматори, чотири аналого-цифрових перетворювачі, клавіатуру, індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний...
Транспортні ваги
Номер патенту: 53485
Опубліковано: 11.10.2010
Автори: Лошкарьов Валерій Іванович, Бугаєнко Георгій Якович, Бугаєнко Максим Георгійович, Бугаєнко Єгор Георгійович
МПК: G01G 19/02, G01G 19/04
Мітки: ваги, транспортні
Формула / Реферат:
Транспортні ваги, які містять приєднувальні плитки, закладні плитки, вантажоприймальні платформи, тензодатчики, що закріплені за допомогою вузлів вмонтування, при цьому кожен вузол вмонтування виконаний у вигляді двох підп'ятників, один з яких закріплений на закладній плитці, а інший - на вантажоприймальній платформі, причому тензодатчики встановлені між підп'ятниками та мають сферичні торцеві поверхні, які відрізняються тим, що, для...
Попередній патент: Спосіб одержання водовугільної суспензії
Наступний патент: Спосіб виготовлення мікробних препаратів з оптимізованим вмістом фітогормонів
Випадковий патент: Спосіб лікування хворих хронічним простатитом