Ваги вагонні з визначенням відхилень центра ваги вагона

Формула / Реферат
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, що встановлені по кутах платформ, чотири суматори, чотири аналого-цифрових перетворювачі, клавіатуру, індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний з входом аналого-цифрового перетворювача, вихід якого підключений до відповідного входу мікропроцесорного контролера, який в свою чергу має енергонезалежну пам'ять для зберігання результатів зважувань, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора, при цьому відхилення центра ваги вагона відносно повздовжньої осі в одиницях відстані обчислюються мікропроцесорним контролером за формулою:
![]() ,
,
а відхилення центра ваги вагона відносно поперечної осі в одиницях відстані обчислюється мікропроцесорним контролером за формулою:
![]() ,
,
причому в цих формулах:
![]() - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії;
- відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії;
![]() - база вагона;
- база вагона;
![]() ,
, ![]() - маса лівого та правого бортів вагона, відповідно, які обчислюються за формулами:
- маса лівого та правого бортів вагона, відповідно, які обчислюються за формулами:
![]() ,
,
![]() ,
,
![]() ,
, ![]() - маса першого та другого візків вагона, відповідно, які обчислюються за формулами:
- маса першого та другого візків вагона, відповідно, які обчислюються за формулами:
![]() ,
,
![]() ,
,
![]() - маса вагона, що обчислюється за формулою:
- маса вагона, що обчислюється за формулою:
![]() ,
,
де ![]() ,
, ![]() ,
, ![]() ,
, ![]() - маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка вагона,
- маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка вагона,
які відрізняються тим, що мікропроцесорний контролер обладнаний енергонезалежною пам'яттю для зберігання значень величин відстані між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії (![]() ) і, за необхідності, бази вагона (
) і, за необхідності, бази вагона (![]() ), при цьому відхилення центра ваги вагона відносно повздовжньої осі в одиницях маси обчислюються. мікропроцесорним контролером за формулою:
), при цьому відхилення центра ваги вагона відносно повздовжньої осі в одиницях маси обчислюються. мікропроцесорним контролером за формулою:
![]() ,
,
а відхилення центра ваги вагона відносно поперечної осі в одиницях маси обчислюється мікропроцесорним контролером за формулою:
![]() .
.
Текст
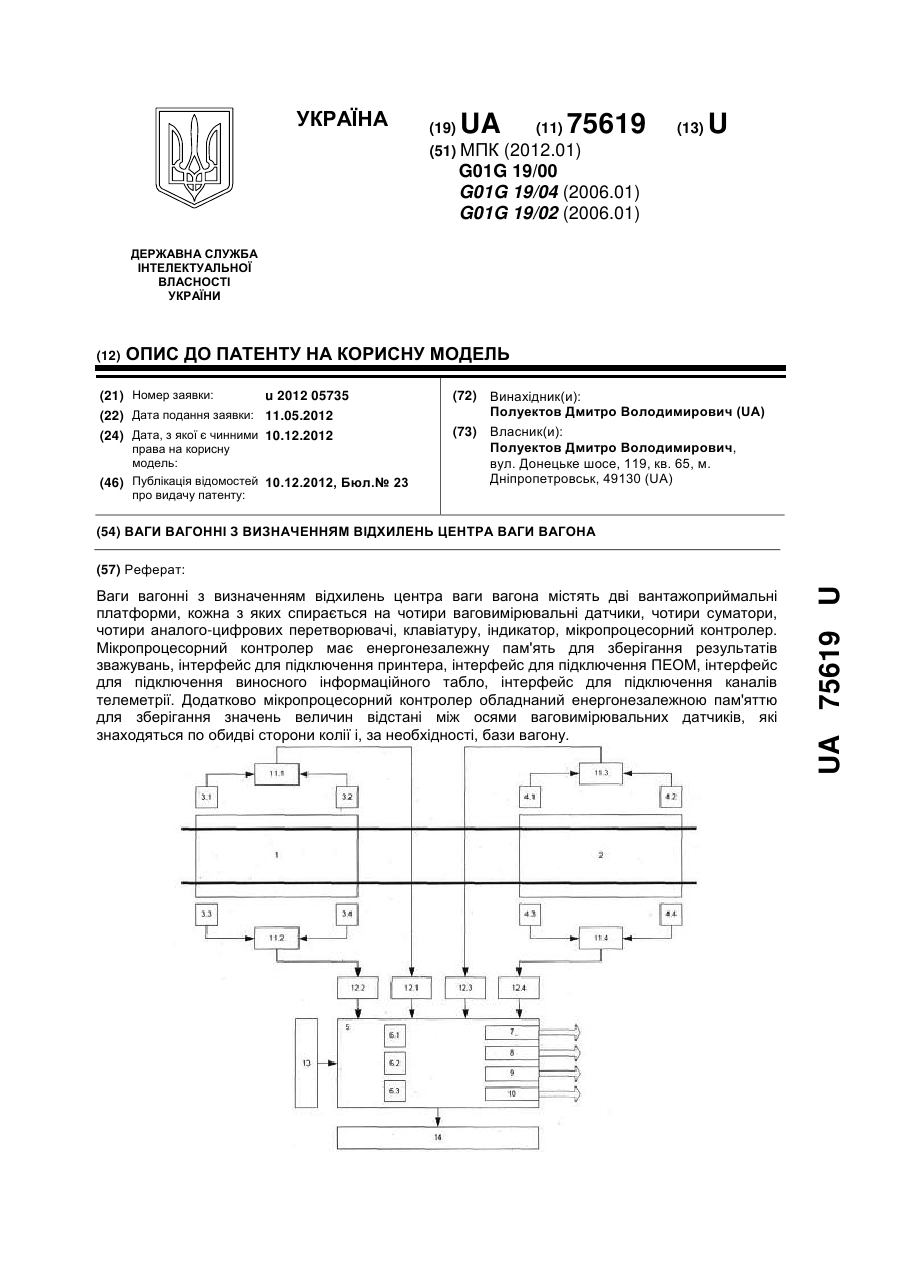
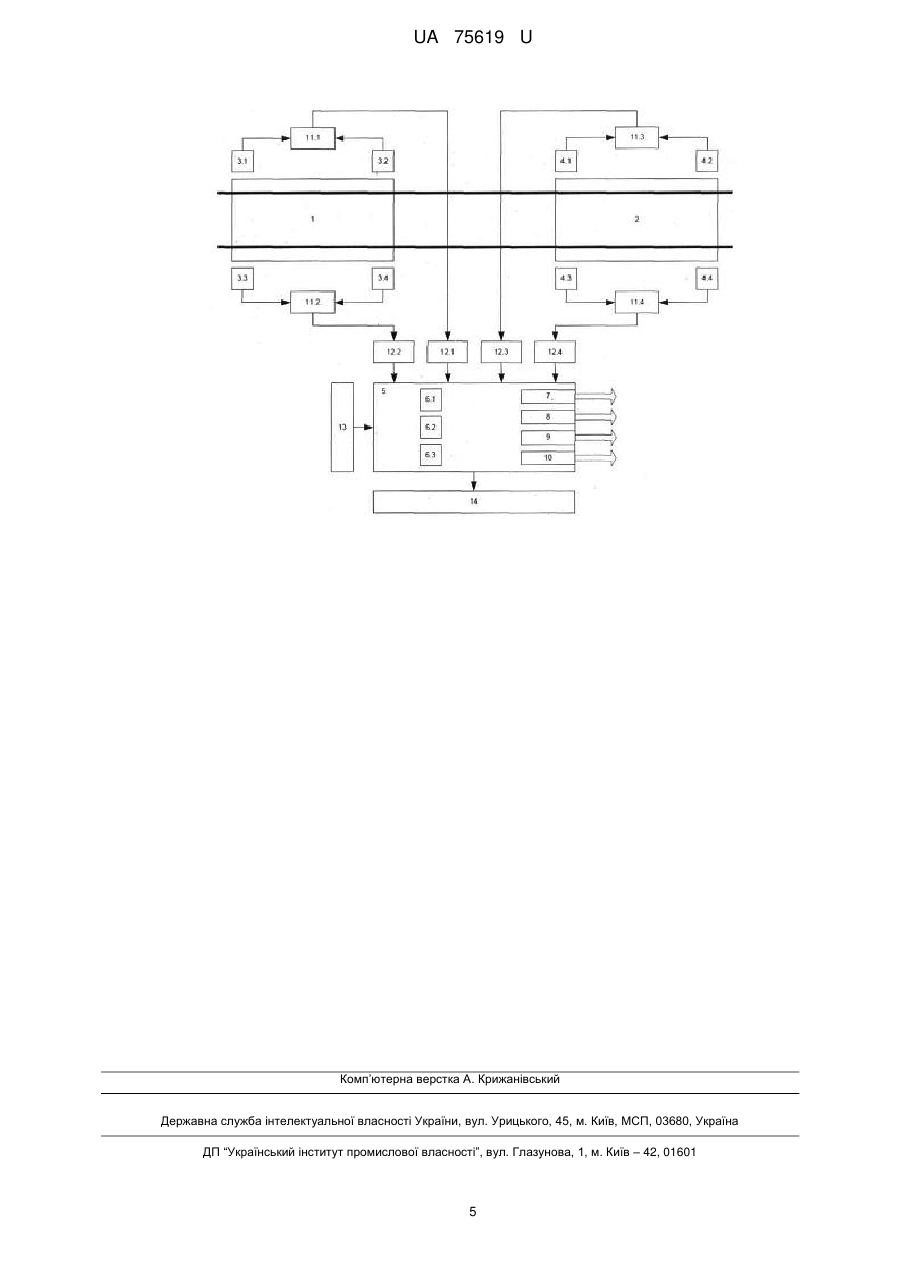
Реферат: UA 75619 U UA 75619 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до ваговимірювальної техніки і може бути використана наприклад при зважуванні залізничних вагонів з необхідністю контролю дотримання допустимих норм відхилення центра тяжіння вагона після його завантаження. Відомі ваги для вимірювання маси вантажу, які складаються з двох вантажоприймальних платформ, кожна з яких спирається на чотири ваговимірювальні датчики, які встановлені по кутах платформи, та мікропроцесорного контролера, який зберігає в енергонезалежній пам'яті результати зважувань, обчислює масу "нетто" вантажу, забезпечує документовану реєстрацію результатів зважувань, має стандартні інтерфейси для підключення ПЕОМ, друкуючого пристрою, виносного інформаційного табло та каналів телеметрії [ВЕСЫ ВАГОННЫЕ ЭЛЕКТРОМЕХАНИЧЕСКИЕ ВВС -150/25. Изготовитель НПК "Сонарус", г. Одесса, Украина в кн. "Весы, весовые дозаторы, системы взвешивания и дозирования. Справочник. Одеса: "Астронринт", 2001 г.]. Головним недоліком цього пристрою є, насамперед, неможливість визначення центра тяжіння вагона та його відхилення від поздовжньої та поперечної осей, що необхідне для контролю дотримання нормованих залізницею допусків на ці параметри завантаження. Найбільш близьким аналогом до корисної моделі, що заявляється, є ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, встановлені по кутах платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, чотири суматори, чотири аналого-цифрових перетворювачі, клавіатуру та індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний з входом аналого-цифрового перетворювача, вихід якого підключений до відповідного входу мікропроцесорного контролера, при цьому відхилення центра ваги вагона відносно повздовжньої осі обчислюється мікропроцесорним контролером за формулою: L y (Gлб Gпб ) , 2Gв а відхилення центра ваги вагона відносно поперечної осі обчислюється мікропроцесорним контролером за формулою: Б x (Gm1 Gm2 ) , 2Gв причому в цих формулах: L - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії; Б - база вагона; Gлб , Gпб - маса лівого та правого бортів вагона, відповідно, які обчислюються за формулами: Gлб G1лб G2лб , Gпб G1пб G2пб , Gm1,Gm2 - маса першого та другого візків, відповідно, які обчислюються за формулами: Gm1 G1лб G1пб , Gm2 G2лб G2пб , де G1лб , G1пб , G2лб , G2пб - маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка, при цьому вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора [патент України на корисну модель № 47685 U, опубл. 2010.02.25, бюл. № 4, МПК G01G 19/00]. Однак, ці ваги також мають недоліки. Насамперед, при зважуванні вагонів згаданими вагами виникає необхідність введення з клавіатури значень бази вагона та відстані між осями ваговимірювальних датчиків, що знаходяться по обидві сторони колії, при кожному зважуванні, що призводить до значних витрат часу та підвищує вірогідність помилок, пов'язаних з людським чинником. Крім того, недоліком вказаних ваг є неможливість визначення відхилення центра тяжіння вагона в одиницях маси вантажу, що було б значно ефективнішим для корекції (центрування) положення вантажу у вагоні, тобто завантаження або вивантаження потрібної кількості вантажу в певну частину (або частини) вагона. 1 UA 75619 U 5 10 15 20 25 30 35 40 45 50 Задачею даної корисної моделі є значне підвищення оперативності та зручності дотримування вимог центрування вантажу в залізничних вагонах під час або після їх завантаження за рахунок такого удосконалення конструкції ваг, щоб було можливим визначення відхилення центра тяжіння вагона в одиницях маси вантажу та щоб при кожному зважуванні не треба було вводити з клавіатури значення бази вагона та відстані між осями ваговимірювальних датчиків, що знаходяться по обидві сторони колії. Поставлена задача вирішується тим, що ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, що встановлені по кутах платформ, чотири суматори, чотири аналого-цифрових перетворювачі, клавіатуру, індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний з входом аналого-цифрового перетворювача, вихід якого підключений до відповідного входу мікропроцесорного контролера, який в свою чергу має енергонезалежну пам'ять для зберігання результатів зважувань, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора, при цьому відхилення центра ваги вагона відносно повздовжньої осі в одиницях відстані обчислюються мікропроцесорним контролером за формулою: l ly (mлб mпб ) , 2mв аг а відхилення центра ваги вагона відносно поперечної осі в одиницях відстані обчислюється мікропроцесорним контролером за формулою: b lx (mв1 mв2 ) , 2mв аг причому в цих формулах: l - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії; b - база вагона; mлб , mпб - маса лівого та правого бортів вагона, відповідно, які обчислюються за формулами: mлб m1лб m2лб , mпб m1пб m2пб , mв1 , mв 2 - маса першого та другого візків вагона, відповідно, які обчислюються за формулами: mв1 m1лб m2пб , mв2 m2лб m2пб , mв аг - маса вагона, що обчислюється за формулою: mваг mв1 mв2 , де m1лб , m1пб , m2лб , m2пб - маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка вагона, згідно з корисною моделлю, вдосконалено таким чином, що мікропроцесорний контролер обладнаний енергонезалежною пам'яттю для зберігання значень величин відстані (I) між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії, і, за необхідності, бази (b) вагона, та мікропроцесорний контролер влаштовано таким чином, що відхилення центра ваги вагона відносно повздовжньої осі в одиницях маси обчислюються ним за формулою: my (mлб mпб ), а відхилення центра ваги вагона відносно поперечної осі в одиницях маси обчислюється. мікропроцесорним контролером за формулою: mx (mв1 mв2 ) . Введення до схеми ваг енергонезалежної пам'яті для зберігання значень величин відстані між осями ваговимірювальних датчиків, що знаходяться по обидві сторони колії і бази вагона, дозволяє не вводити їх з клавіатури при кожному зважуванні, оскільки відстань між осями ваговимірювальних датчиків є квазіпостійною величиною, а база вагона не змінюється при зважуванні однотипних вагонів. Також при послідовному зважуванні різнотипних вагонів 2 UA 75619 U 5 10 15 20 25 30 35 40 45 (наприклад у складі одного поїзда) можна не задавати значення величини довжини їх бази, а орієнтуватися за показаннями тільки зсуву маси вантажу в вагоні відносно його поперечної осі, при цьому відхилення центра ваги вагона відносно повздовжньої осі може визначатися як в одиницях відстані, так і в одиницях маси. Крім того, для визначення вагами відхилень центра ваги вагона відносно повздовжньої та поперечної осей в одиницях маси вводити значення вищезгаданих величин зовсім не потрібно. Вказані ознаки сприяють значному підвищенню оперативності та зручності дотримування вимог залізниці з центрування вантажу в вагонах і, як наслідок, значному заощадженню часу при зважуванні та завантаженні вагонів, та зменшенню вірогідності помилок за рахунок людського чинника. На кресленні показана структурна блок-схема вагонних ваг, що пропонуються. Ваги містять дві вантажоприймальні платформи 1 та 2, кожна з яких спирається на чотири ваговимірювальні датчики, відповідно, 3.1, 3.2, 3.3, 3.4 на першій платформі, та 4.1, 4.2, 4.3, 4.4 на другій платформі, мікропроцесорний контролер 5, який має енергонезалежну пам'ять 6.1 для зберігання результатів зважувань, 6.2 - для зберігання значення величини відстані між осями ваговимірювальних датчиків та 6.3 - для зберігання значення величини бази вагона відповідно, інтерфейс 7 - для підключення принтеру, інтерфейс 8 - для підключення ПЕОМ, інтерфейс 9 - для підключення виносного інформаційного табло, інтерфейс 10 - для підключення каналів телеметрії, чотири суматори 11,1, 11.2, 11.3, 11.4 сигналів ваговимірювальних датчиків, чотири аналого-цифрових перетворювача 12.1, 12.2,12.3, 12.4, клавіатуру 13 та індикатор 14. Ваги працюють наступним чином. Кожен візок вагона розміщується на відповідній платформі 1 та 2, а сигнали від датчиків ваговимірювальних 3.1-3.4 та 4.1-4.4 додаються попарно кожним відповідним суматором 11.111.4. Таким чином, на виході суматора 11.1 виникає сигнал, який є сумою сигналів датчиків 3.1 та 3.2. Ця сума пропорційна масі лівої сторони першого візка. На виході суматора 11.2 виникає сигнал, який, є сумою сигналів датчиків 3.3 та 3.4. Ця сума пропорційна масі правої сторони першого візка. На виході суматора 11.3 виникає сигнал, який є сумою сигналів датчиків 4.1 та 4.2. Ця сума пропорційна масі лівої сторони другого візка. На виході суматора 11.4 виникає сигнал, який є сумою сигналів датчиків 4.3 та 4.4. Ця сума пропорційна масі правої сторони другого візка. Сигнали з суматорів 11.1-11.4 надходять на аналого-цифрові перетворювачі 12.112.4, відповідно, на виході кожного з яких з'являється цифровий код, що є числовим еквівалентом величин відповідних сум. Мікропроцесорний контролер 5 підсумовує значення величин з виходів аналого-цифрових перетворювачів 12.1 та 12.2, в результаті чого отримує значення величини mв1 , що пропорційна масі першого візка, а також значення величин з виходів аналого-цифрових перетворювачів 12.3 та 12.4, що дає значення величини mв 2 , що пропорційна масі другого візка. Також мікропроцесорний контролер 5 обчислює суму значень з виходів аналого-цифрових перетворювачів 12.1 та 12.3, в результаті чого отримує значення mлб , що пропорційне масі лівого боку вагона, та суму значень з виходів аналого-цифрових перетворювачів 12.2 та 12.4, що дає значення mпб , що пропорційне масі правого боку вагона. Значення з виходів аналогоцифрових перетворювачів 12.1 та 12.3 відповідають значенням величин m1лб та m2лб , що пропорційні масі лівого боку першого та другого візків вагона, відповідно, а значення з виходів аналого-цифрових перетворювачів 12.2 та 12.4 відповідають значенням величин m1пб та m2пб , що пропорційні масі правого боку першого та другого візків вагона, відповідно. Далі мікропроцесорний контролер 5 обчислює відхилення центра ваги вагона відносно повздовжньої осі в одиницях відстані ly , відхилення центра ваги вагона відносно поперечної осі в одиницях відстані lx , відхилення центра ваги вагона відносно повздовжньої осі в одиницях маси my , відхилення центра ваги вагона відносно поперечної осі в одиницях маси 50 mx , відповідно, за формулами: ly l (mлб mпб ) , 2mв аг b (mв1 mв2 ) , 2mв аг (mлб mпб ) , lx my 3 UA 75619 U 5 10 15 20 25 30 35 40 45 50 mx (mв1 mв2 ) , де l - ширина колії вагона (мм) та b - база вагона (мм) - величини, значення яких вводяться до пам'яті 6.2 та 6.3, відповідно, мікропроцесорного контролера 5 за допомогою клавіатури 13; mв аг - маса вагона (кг), що обчислюється мікропроцесорним контролером 5 за формулою: mваг mв1 mв2 mлб mпб m1лб m2лб m1пб m2пб . Всі результати обчислень, в тому числі проміжні, мікропроцесорний контролер 5 видає на індикатор 14, що їх, в свою чергу, відображає. Це дає можливість оператору зручно та оперативно контролювати процес завантаження вагона та впливати, за необхідності, на нього. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, що встановлені по кутах платформ, чотири суматори, чотири аналого-цифрових перетворювачі, клавіатуру, індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний з входом аналого-цифрового перетворювача, вихід якого підключений до відповідного входу мікропроцесорного контролера, який в свою чергу має енергонезалежну пам'ять для зберігання результатів зважувань, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора, при цьому відхилення центра ваги вагона відносно повздовжньої осі в одиницях відстані обчислюються мікропроцесорним контролером за формулою: l ly (mлб mпб ) , 2mв аг а відхилення центра ваги вагона відносно поперечної осі в одиницях відстані обчислюється мікропроцесорним контролером за формулою: b lx (mв1 mв2 ) , 2mв аг причому в цих формулах: l - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії; b - база вагона; mлб , mпб - маса лівого та правого бортів вагона, відповідно, які обчислюються за формулами: mлб m1лб m2лб , mпб m1пб m2пб , mв1 , mв 2 - маса першого та другого візків вагона, відповідно, які обчислюються за формулами: mв1 m1лб m2пб , mв2 m2лб m2пб , mв аг - маса вагона, що обчислюється за формулою: mваг mв1 mв2 , де m1лб , m1пб , m2лб , m2пб - маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка вагона, які відрізняються тим, що мікропроцесорний контролер обладнаний енергонезалежною пам'яттю для зберігання значень величин відстані між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії ( l ) і, за необхідності, бази вагона ( b ), при цьому відхилення центра ваги вагона відносно повздовжньої осі в одиницях маси обчислюються. мікропроцесорним контролером за формулою: my (mлб mпб ) , а відхилення центра ваги вагона відносно поперечної осі в одиницях маси обчислюється мікропроцесорним контролером за формулою: mx (mв1 mв2 ) . 4 UA 75619 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюRail weigh-bridge with determination of deflection of gravity center of wagon
Автори англійськоюPoluektov Dmytro Volodymyrovych
Назва патенту російськоюВесы вагонные с определением отклонений центра тяжести вагона
Автори російськоюПолуектов Дмитрий Владимирович
МПК / Мітки
МПК: G01G 19/00, G01G 19/02, G01G 19/04
Мітки: відхилень, ваги, центра, вагона, вагонні, визначенням
Код посилання
<a href="https://ua.patents.su/7-75619-vagi-vagonni-z-viznachennyam-vidkhilen-centra-vagi-vagona.html" target="_blank" rel="follow" title="База патентів України">Ваги вагонні з визначенням відхилень центра ваги вагона</a>
Ваги вагонні з визначенням відхилень центра ваги вагона
Номер патенту: 47685
Опубліковано: 25.02.2010
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/00
Мітки: ваги, вагонні, визначенням, центра, відхилень, вагона
Формула / Реферат:
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, встановлені по кутах платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, введені чотири суматори,...
Ваги вагонні дво- або триплатформні з визначенням відхилення центру тяжіння вагона
Номер патенту: 51330
Опубліковано: 12.07.2010
Автори: Бугаєнко Георгій Якович, Бугаєнко Максим Георгійович, Бугаєнко Єгор Георгійович
МПК: G01G 19/00
Мітки: дво, ваги, центру, триплатформні, вагонні, тяжіння, відхілення, вагона, визначенням
Формула / Реферат:
Ваги вагонні дво- або триплатформні з визначенням відхилень центру тяжіння вагона, які мають дві або три платформи, кожна з яких спирається на чотири ваговимірювальні датчики, мікропроцесорний контролер, в складі якого є енергонезалежна пам'ять, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло та інтерфейс для підключення каналів телеметрії, які відрізняються тим, що...
Спосіб визначення координат центра ваги автомобіля і пристрій для його здійснення
Номер патенту: 71950
Опубліковано: 17.01.2005
Автори: Коваленко Володимир Ілліч, Хом'як Роман Ілліч, Швідлер Олександр Петрович, Кобільник Микола Степанович
МПК: G01G 9/00, G01G 19/02, G01M 1/12
Мітки: пристрій, автомобіля, спосіб, ваги, визначення, центра, здійснення, координат
Формула / Реферат:
1. Спосіб визначення координат центра ваги автомобіля, при здійсненні якого заїжджають автомобілем на ваги окремо передніми і задніми колесами, реєструють покази ваг, заїжджають одночасно на ваги і на місток з нахилом автомобіля, який відрізняється тим, що заїжджають на платформу ваг односторонніми переднім і заднім колесами, залишаючи протилежні переднє і заднє колеса поза платформою, заїжджають на місток односторонніми переднім і заднім...
Спосіб визначення положення центра ваги колісного транспортного засобу і пристрій для його здійснення
Номер патенту: 69620
Опубліковано: 15.09.2004
Автори: Мальнов Сергій Іванович, Козлинський Мирослав Петрович, Плешкановський Олег Валентинович, Денис Василь Володимирович
МПК: B60C 23/00
Мітки: визначення, центра, ваги, засобу, здійснення, спосіб, пристрій, колісного, транспортного, положення
Формула / Реферат:
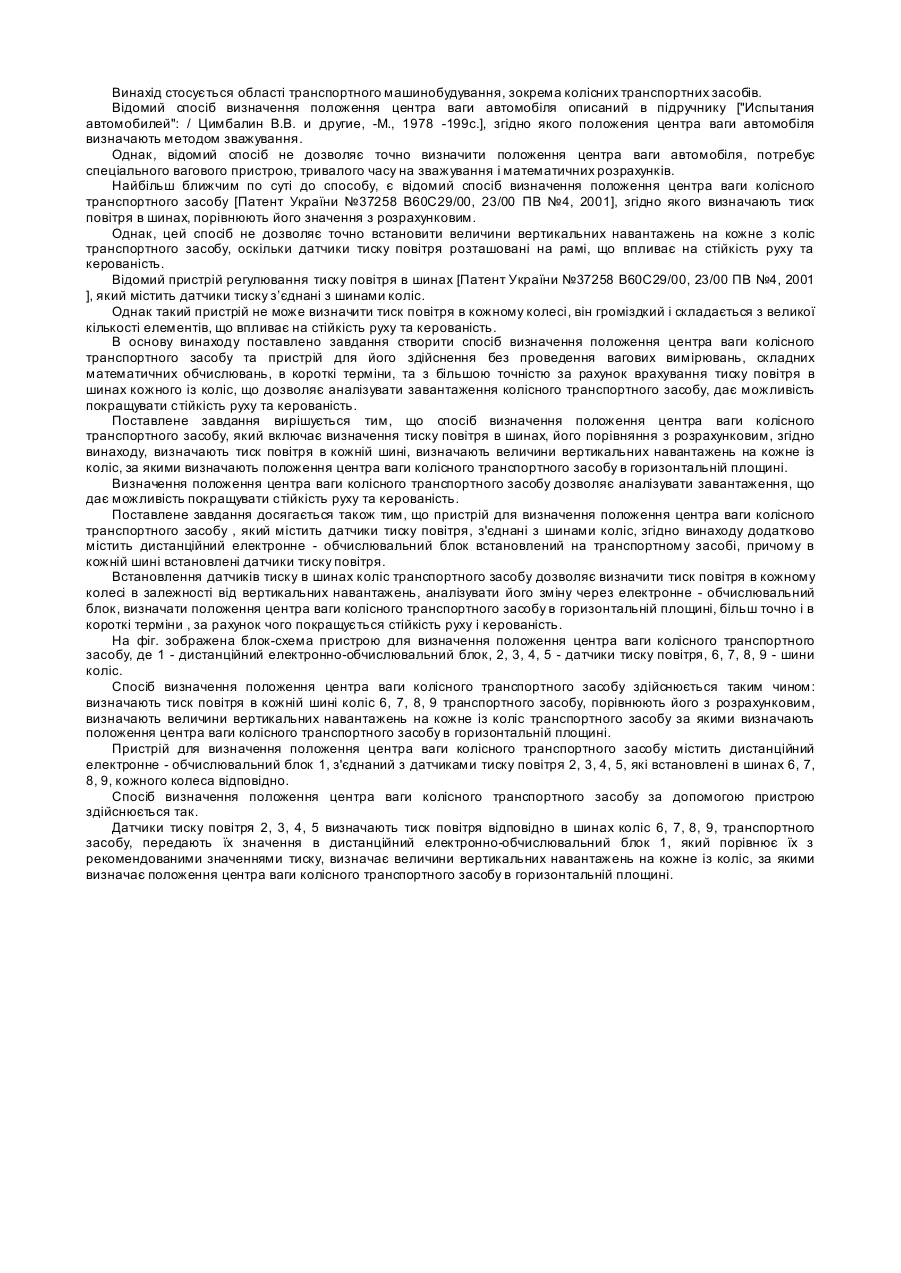
1. Спосіб визначення положення центра ваги колісного транспортного засобу, що включає визначення тиску повітря в шинах, його порівняння з розрахунковим, який відрізняється тим, що визначають тиск повітря в кожній шині коліс, визначають величини вертикальних навантажень на кожне із коліс, за якими визначають положення центра ваги колісного транспортного засобу в горизонтальній площині.2. Пристрій для визначення положення центра ваги...
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині і пристрій для його здійснення
Номер патенту: 19834
Опубліковано: 15.01.2007
Автори: Козлинський Мирослав Петрович, Денис Василь Володимирович
МПК: B60C 23/00
Мітки: центра, вертикальний, площині, колісного, положення, ваги, спосіб, засобу, визначення, пристрій, транспортного, здійснення
Формула / Реферат:
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим, який відрізняється тим, що визначають зміну тиску повітря в кожній шині коліс при прямолінійному русі під час гальмування колісного транспортного засобу, визначають величини вертикальних і горизонтальних навантажень на кожне із коліс, за якими визначають...
Попередній патент: Спосіб одержання калію нітрату і магнію хлориду з калію хлориду і магнію нітрату
Наступний патент: Запобіжний пристрій зброї
Випадковий патент: Спосіб одержання сірки