Пристрій для стабілізації обертального руху літального апарата в набігаючому потоці
Номер патенту: 105904
Опубліковано: 10.07.2014
Автори: Дронь Микола Михайлович, Хорольський Петро Георгійович
Формула / Реферат
Пристрій для стабілізації обертального руху літального апарата в набігаючому потоці, який включає покажчик потоку у вигляді симетричної крилової аеродинамічної поверхні, встановленої на апараті за допомогою поперечної осі обертання і перпендикулярної до неї осі обертання, установленої в напрямку повздовжньої осі літального апарата, та датчик кутової швидкості, який відрізняється тим, що цей датчик установлено так, що його вісь чутливості колінеарна повздовжній осі обертання покажчика потоку.
Текст
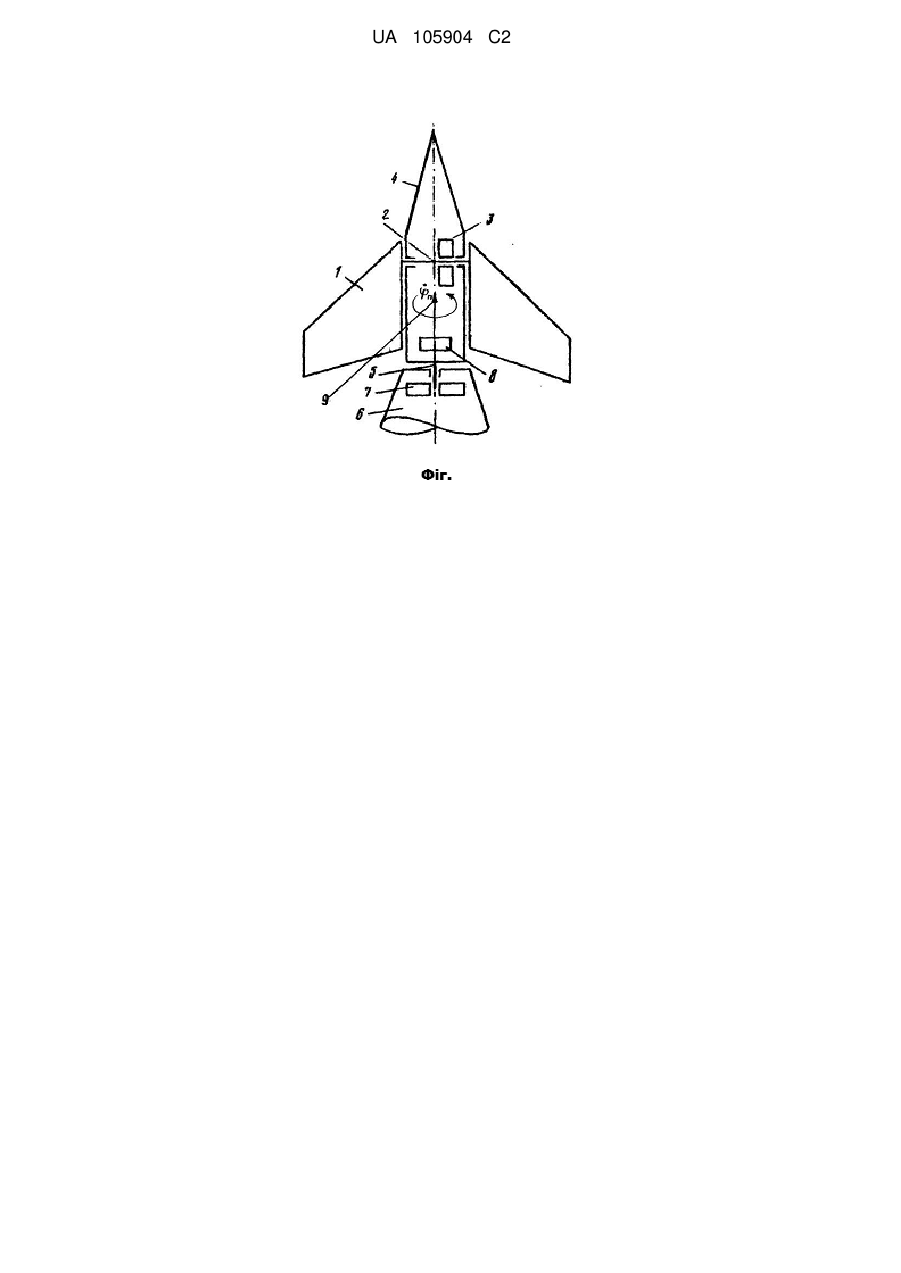
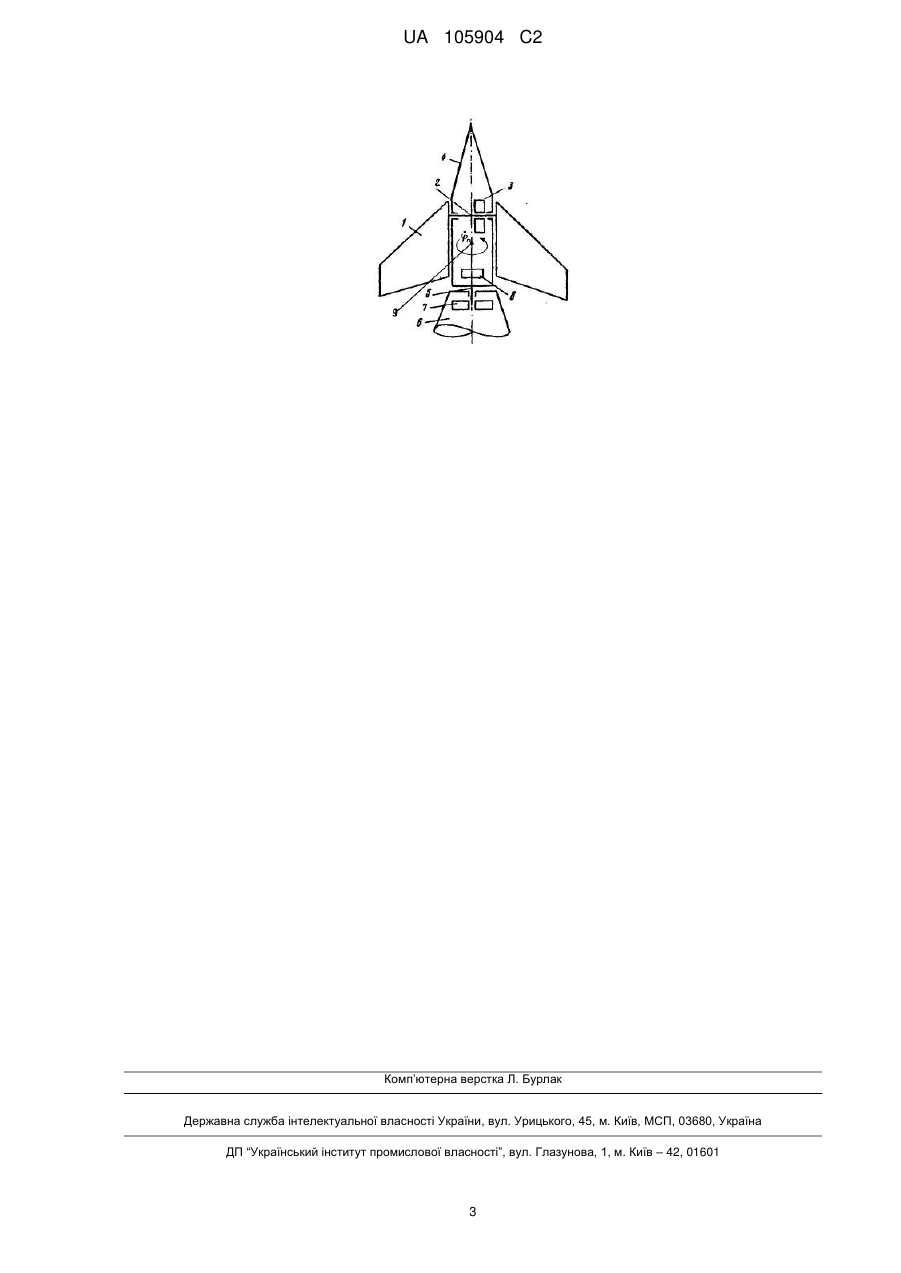
Реферат: Винахід належить до аерокосмічної техніки, конкретно - до керування літальними апаратами на атмосферній ділянці траєкторії польоту. Пристрій для стабілізації обертального руху літального апарата в набігаючому потоці включає покажчик потоку у вигляді симетричної крилової аеродинамічної поверхні, встановленої на апараті за допомогою поперечної осі обертання і перпендикулярної до неї осі обертання, установленої в напрямку повздовжньої осі літального апарата, та датчик кутової швидкості. Датчик установлено так, що його вісь чутливості колінеарна повздовжній осі обертання покажчика потоку. Винахід дозволяє підвищити точності вимірювання. UA 105904 C2 (12) UA 105904 C2 UA 105904 C2 5 10 15 20 25 30 35 Винахід належить до аерокосмічної техніки, конкретно - до керування літальними апаратами (ЛА) на атмосферній ділянці траєкторії польоту. Відомі пристрої керування рухом літальних апаратів відносно набігаючого потоку маятникового типу для постійних чутливих датчиків, що знімають інформацію про кутові параметри відносно обертальної площини повного кута атаки [1]. Головним недоліком цих пристроїв є застосовність тільки для симетричних ЛА. Відомі пристрої, що виконують прямі вимірювання кутів атаки або ковзання, наприклад [2]. У ньому місцевий кут ковзання вимірюють флюгаркою. Недоліком таких пристроїв є складність і підвищені маса та габарити, які є результатом необхідності виміру всіх кутів відносно набігаючого потоку (один датчик - для виміру кута атаки, другий - для кута ковзання, а також, за потреби, система обчислення повного кута атаки), а також вимір тільки одного кутового параметра. Відомі пристрої для непрямих вимірів, що проводяться розрахунковим шляхом по прямих вимірах інших параметрів. Наприклад, датчиками тиску, розподіленими по частині поверхні ЛА [3]. їх недоліки такі: - зниження міцності корпуса і теплозахисту; - необхідність досить точного знання аеродинамічних характеристик ЛА; - обмежений у порівнянні з флюгарковим датчиком діапазон виміру кута атаки; - ускладнення конструкції корпуса ЛА, особливо в умовах підвищених теплових навантажень і високих тисків; - залежність точності від вимірюваного діапазону тисків; - необхідність в одержанні точних тарувальних залежностей; - висока чутливість до зміни форми ЛА. Відомі пристрої вимірювання кута атаки за показаннями акселерометрів і датчиків кутової швидкості [4], тільки датчиків кутової швидкості [5], тільки акселерометрів [6]. Їх недоліки такі: - необхідність точного знання аеродинамічних характеристик ЛА для всіх режимів польоту; - необхідність в одержанні точних тарувальних залежностей; - висока чутливість до зміни форми ЛА; - велика складність (датчиків кожного типу повинно бути не менше трьох, повинна бути система обробки інформації та обчислення потрібних параметрів, ускладнюється конструкція ЛА). Найбільш близьким аналогом є пристрій [7], який включає покажчик потоку у вигляді симетричної крилової аеродинамічної поверхні, встановленої на апараті за допомогою поперечної осі обертання покажчика потоку і перпендикулярної до неї осі обертання, установленої в напрямку повздовжньої осі літального апарата, та датчика кутової швидкості, вісь чутливості якого орієнтована перпендикулярно до площини симетрії покажчика потоку. Недоліком цього пристрою є вимірювання швидкості зміни тільки одного із кутів, що вимірюються пристроєм, а саме просторового кута атаки 40 45 50 55 П . Це унеможливлює використання пропорційно-диференційних (ПД) регуляторів для каналу аеродинамічного крену П без чисельного диференціювання. Але така операція значно підсилює шуми і зумовлює погану точність отриманих таким чином даних, тому її намагаються не використовувати. Поставлена задача вирішується тим, що в пристрої для стабілізації обертального руху літального апарата в набігаючому потоці, який включає покажчик потоку у вигляді симетричної крилової аеродинамічної поверхні, встановленої на апараті за допомогою поперечної осі обертання і перпендикулярної до неї осі обертання, установленої в напрямку повздовжньої осі літального апарата, та датчик кутової швидкості, цей датчик установлено так, що його вісь чутливості колінеарна повздовжній осі обертання покажчика потоку. Суть винаходу продемонстрована на кресленні. На кресленні зображено вид зверху пристрою для стабілізації обертального руху літального апарата в набігаючому потоці за винаходом. Заявлений винахід реалізується таким чином. На кресленні показаний покажчик потоку (ПК) 1 флюгерного типу, виконаний у вигляді симетричної крилової аеродинамічної поверхні, установленої на поперечній осі 2, з якою кінематично зв'язаний датчик 3 кута відхилення покажчика, що вимірює повний (просторовий) кут атаки. Вісь обертання покажчика і його датчик кута відхилення включено в симетричний корпус 4, який встановлено на поздовжній осі (ПО) 5 обертання відносно ЛА 6. З віссю 5 зв'язано датчик кута 7, що вимірює кут аеродинамічного крену 1 П . В корпусі 4 (або на ньому) UA 105904 C2 5 незалежно від ПК встановлено ДКШ 8, що вимірює кутову швидкість відносно осі чутливості 9, колінеарної повздовжній осі обертання ПК 1 (і, відповідно, повздовжній осі ЛА). При попаданні пристрою, що заявляється, в набігаючий потік (НП) ПК 1 орієнтує корпус 4 в площину просторового кута атаки завдяки його обертанню навколо ПО 5. А корпус 4 пристрою, в разі установки його в статиці поздовжньою віссю 5 паралельно поздовжній осі ЛА 6, відслідковує саме площину просторового кута атаки і завдяки цьому кут аеродинамічного крену П 10 вимірюється датчиком кута 7. В свою чергу ДКШ 8, вісь чутливості якого паралельна повздовжній осі обертання ПК 5, вимірює кутову швидкість П обертового руху ЛА відносно НП. Одночасне вимірювання двох параметрів кутового обертового руху ЛА відносно набігаючого потоку П та П дозволяє підвищити точність керування апаратом за допомогою законів управління, що включають першу похідну від кута атаки, наприклад, ПД-регулятора: 15 u aП П аП П , де u - сигнал управління; a П , a П - коефіцієнти закону керування; t - час. 20 25 30 35 40 Пряме вимірювання П забезпечує точність регулювання, відповідну до класу приладної точності датчика кутової швидкості, і не призводить до збільшення похибок, яке властиве операції чисельного диференціювання. Таким чином, вирішена поставлена задача розробки пристрою для стабілізації обертового руху літального апарату в набігаючому потоці мінімальної складності і високої точності з використанням прямих вимірювань кутових параметрів. ДЖЕРЕЛА ІНФОРМАЦІЇ: 1. Пат. США № 4026498, НПК 73-188, 1979. 2. Пат. 2195415 Росія МКВ7 В64С 13/18, G01P5/00, 2002. 3. Петров Б. Н., Крымов А. Б. Измерение углов атаки и скольжения с помощью моделей распределения давления на сферической лобовой поверхности // Известия вузов. Приборостроение. - 1973. - № 12. - С. 5-9. 4. Пат. Великобританія 2275902 А1 В64 Д 43/02. Авиационное устройство для расчета компенсированного угла атаки и рыскания для предупреждения срыва потока//Изобретения стран мира, 1996. - Вып. 33 - № 7. - С. 5. 5. Оптимизация изделий ракетно-космической техники на основе совместного исследования процессов управления движением проектируемых объектов и нагружения их конструкций на атмосферном участке траекторий / В. Г. Динеев, А. Э. Колозезный, Э. А. Колозезный, В. А. Наумов, Н. М. Сергеев, В. Н. Чихарев / Космонавтика и ракетостроение. - 1997. - № 10. С. - 7687. 6. Определение углов атаки и скольжения по сигналам акселерометров, установленных на борту летательных аппаратов // Известия вузов. Приборостроение. - 1975. - № 3. - С. 62-67. 7. Пат. 87721 Україна МПК, B64G1/24, G01P13/00. Пристрій для стабілізації руху літального апарата відносно потоку// М. М. Дронь, П. Г. Хорольський. - а200707635. Заявл. 06.07.2007; Опубл. 10.08.2009. Описание изобретения 4 с.// Бюл. № 15. ФОРМУЛА ВИНАХОДУ 45 50 Пристрій для стабілізації обертального руху літального апарата в набігаючому потоці, який включає покажчик потоку у вигляді симетричної крилової аеродинамічної поверхні, встановленої на апараті за допомогою поперечної осі обертання і перпендикулярної до неї осі обертання, установленої в напрямку повздовжньої осі літального апарата, та датчик кутової швидкості, який відрізняється тим, що цей датчик установлено так, що його вісь чутливості колінеарна повздовжній осі обертання покажчика потоку. 2 UA 105904 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюDron Mykola Mykhailovych, Khorolskyi Petro Heorhiiovych
Автори російськоюДронь Николай Михайлович, Хорольский Петр Георгиевич
МПК / Мітки
МПК: G01P 13/00, B64G 1/24
Мітки: апарата, набігаючому, пристрій, обертального, стабілізації, літального, потоці, руху
Код посилання
<a href="https://ua.patents.su/5-105904-pristrijj-dlya-stabilizaci-obertalnogo-rukhu-litalnogo-aparata-v-nabigayuchomu-potoci.html" target="_blank" rel="follow" title="База патентів України">Пристрій для стабілізації обертального руху літального апарата в набігаючому потоці</a>
Пристрій для стабілізації руху літального апарата відносно потоку
Номер патенту: 87721
Опубліковано: 10.08.2009
Автори: Дронь Микола Михайлович, Хорольський Петро Георгійович
МПК: G01P 13/00, B64G 1/24
Мітки: літального, апарата, пристрій, руху, відносної, стабілізації, потоку
Формула / Реферат:
Пристрій для стабілізації літального апарата відносно набігаючого потоку, що включає покажчик потоку у вигляді симетричної крилоподібної аеродинамічної поверхні, встановленої на апараті за допомогою поперечної осі обертання покажчика потоку і перпендикулярної до неї осі обертання, установленої в напрямку повздовжньої осі літального апарата, який відрізняється тим, що на покажчику потоку встановлений датчик кутової швидкості, причому так, що...
Адаптивна система стабілізації космічного літального апарата
Номер патенту: 45233
Опубліковано: 26.10.2009
Автори: Вировець Аліна Володимирівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: космічного, літального, стабілізації, адаптивна, система, апарата
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка має датчик кута, вихід якого під'єднаний до першого входу блока керування, датчик кутової швидкості, вихід якого під'єднаний до другого входу блока керування, а вихід блока керування через блок підсилювачів потужності підключений до релейних виконавчих органів, яка відрізняється тим, що в неї введені блок визначення збурюючого моменту, вихід якого під'єднаний до четвертого...
Адаптивна система стабілізації космічного літального апарата

Номер патенту: 46189
Опубліковано: 10.12.2009
Автори: Бандура Іван Миколайович, Демидова Вікторія Олександрівна
МПК: B64G 1/24
Мітки: стабілізації, літального, адаптивна, космічного, система, апарата
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка містить датчик кута, вихід якого з'єднаний з першим входом блока керування, датчик кутової швидкості, вихід якого з'єднаний з другим входом блока керування, вихід блока керування через блок підсилювачів потужності з'єднаний з релейним виконавчим органом, яка відрізняється тим, що в неї введений блок визначення мінімального керуючого імпульсу, вхід якого з'єднаний з виходом...
Система стабілізації безпілотного літального апарата
Номер патенту: 65285
Опубліковано: 25.11.2011
Автори: Субота Анатолій Максимович, Кописов Олег Едуардович, Льовкін Сергій Генадійович
МПК: B64C 13/00
Мітки: літального, система, апарата, безпілотного, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить послідовно з'єднані обчислювач, підсилювач, рульову машину, орган управління та датчик кута, датчик кутової швидкості, яка відрізняється тим, що містить задатчик, вихід якого з'єднаний з входом обчислювача, вихід рульової машини одночасно з'єднаний з входом органа управління і через перший перетворювач з'єднаний з входом адаптивного контура, а вихід органа управління з'єднаний...
Адаптивний спосіб стабілізації космічного літального апарата

Номер патенту: 46167
Опубліковано: 10.12.2009
Автори: Городнічін Віктор Вікторович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: стабілізації, спосіб, літального, космічного, апарата, адаптивний
Формула / Реферат:
Адаптивний спосіб стабілізації космічного літального апарата, який полягає в тому, що вимірюють кут і кутову швидкість космічного літального апарата, формують керуючий сигнал, створюють керуючий момент за допомогою релейних виконавчих органів, який відрізняється тим, що при зменшенні кута до величини менше зони нечутливості по куту, визначають збурюючий момент, після чого додатково створюють при необхідності керуючий момент для зміни кутової...
Попередній патент: Похідні дибензотіазепіну та їх застосування
Наступний патент: Спосіб складання великих радіальних адсорберів
Випадковий патент: Пристрій комплектний розподільний рівня вибухозахистів рн і рв з блоком захисту і керування