Пристрій для стабілізації руху літального апарата відносно потоку
Номер патенту: 87721
Опубліковано: 10.08.2009
Автори: Дронь Микола Михайлович, Хорольський Петро Георгійович
Формула / Реферат
Пристрій для стабілізації літального апарата відносно набігаючого потоку, що включає покажчик потоку у вигляді симетричної крилоподібної аеродинамічної поверхні, встановленої на апараті за допомогою поперечної осі обертання покажчика потоку і перпендикулярної до неї осі обертання, установленої в напрямку повздовжньої осі літального апарата, який відрізняється тим, що на покажчику потоку встановлений датчик кутової швидкості, причому так, що його вісь чутливості орієнтована перпендикулярно до площини симетрії покажчика потоку.
Текст
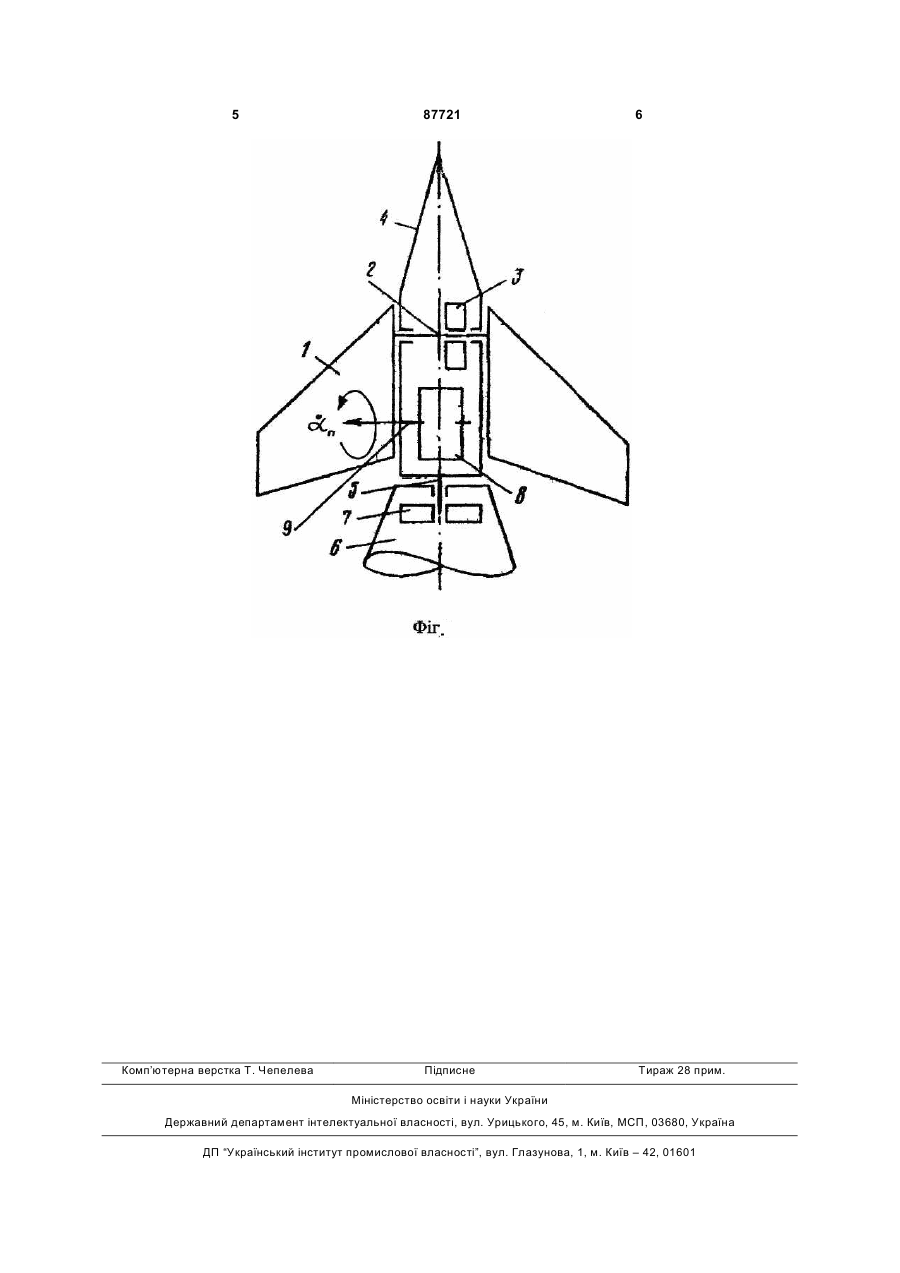
Пристрій для стабілізації літального апарата відносно набігаючого потоку, що включає покажчик потоку у вигляді симетричної крилоподібної аеродинамічної поверхні, встановленої на апараті за допомогою поперечної осі обертання покажчика потоку і перпендикулярної до неї осі обертання, установленої в напрямку повздовжньої осі літального апарата, який відрізняється тим, що на покажчику потоку встановлений датчик кутової швидкості, причому так, що його вісь чутливості орієнтована перпендикулярно до площини симетрії покажчика потоку. (19) (21) a200707635 (22) 06.07.2007 (24) 10.08.2009 (46) 10.08.2009, Бюл.№ 15, 2009 р. (72) ДРОНЬ МИКОЛА МИХАЙЛОВИЧ, ХОРОЛЬСЬКИЙ ПЕТРО ГЕОРГІЙОВИЧ (73) ДНІПРОПЕТРОВСЬКИЙ НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ ІМЕНІ ОЛЕСЯ ГОНЧАРА (56) US, патент №6064923, B64C 13/16, 16.05.2000. UA патент №70873 A, F42B 15/00, B64G 1/00, публ. 15.10.2004. 3 регуляторів потрібно знання похідної від αn, тобто άп. Його можна отримати диференціюванням αn по даним пристрою [7]. Але така операція значно підсилює шуми і зумовлює погану точність отриманих таким чином даних, тому її намагаються не використовувати. В основу винаходу поставлена задача розробки пристрою для стабілізації літального апарату відносно набігаючого потоку мінімальної складності і підвищеної точності з використанням прямих вимірювань кутових параметрів. Поставлена задача вирішується тим, що в пристрої для стабілізації літального апаратa відносно набігаючого потоку, який включає покажчик потоку у вигляді симетричної крилової аеродинамічної поверхні, встановленої на апараті за допомогою поперечної осі обертання покажчика потоку і перпендикулярної до неї осі обертання, установленої в напрямку повздовжньої осі літального апаратa на покажчику потоку встановлено датчик кутової швидкості, причому так, що його вісь чутливості орієнтована перпендикулярно до площини симетрії покажчика потоку. Суть винаходу продемонстрована на кресленні. На Фіг. зображено вид зверху пристрою для стабілізації ЛА відносно набігаючого потоку за винаходом. Заявлений винахід реалізується таким чином. На Фіг. показаний покажчик потоку (ПК) 1 флюгерного типу, виконаний у вигляді симетричної крилової аеродинамічної поверхні, установленої на поперечній осі 2, з якою кінематично зв'язаний датчик 3 кута відхилення покажчика, що вимірює повний (просторовий) кут атаки αп. Вісь обертання покажчика і його датчик кута відхилення включено в симетричний корпус 4, який встановлено на поздовжній осі (ПО) 5 обертання відносно ЛА 6. З віссю 5 зв'язано датчик 7 кута, що вимірює кут аеродинамічного крену g. В корпусі встановлено датчик кутової швидкості (ДКШ) 8, що вимірює кутову швидкість відносно осі чутливості 9, перпендикулярної до площини симетрії покажчика потоку (тобто паралельно поперечній осі 2). При попаданні пристрою, що заявляється, в набігаючий потік (НП) ПК 1 орієнтує корпус 4 в площині просторового кута атаки завдяки його обертанню навколо ПО 5, а сам ПК 1 завдяки поперечній осі 2 відхиляється відносно корпусу 4 на просторовий кут атаки αn. Тобто покажчик потоку 1 є нерухомим відносно НП при всіх змінах його напрямку (з точністю до динаміки руху). Тоді як корпус 4 пристрою, в разі установки його в статиці поздовжньою віссю 5 паралельно поздовжній осі ЛА 6, відслідковує тільки площину просторового кута атаки. Оскільки ПК 1 обертається навколо корпусу 4 завдяки поперечній осі 2 і сам нерухомий відносно потоку, а ПО ЛА 6 і ПО 5 корпусу 4, в свою чергу, зберігають в русі свою паралельність (на Фіг. співпадають) і взаємну нерухомість, то 87721 4 корпус 4 обертається навколо поперечної осі 2 ПК 1, який відслідковує напрямок НП, з кутовою швидкістю άп. ДКШ 8, встановлений за винаходом на корпусі 4, вимірює його кутову швидкість відносно НП. Встановлення ДКШ 8 віссю чутливості перпендикулярно ітощині симетрії корпусу 4, тобто паралельно поперечній осі 2 ПК 1, забезпечує вимірювання саме άπ. Сигнал ап знімають з датчика 3 кута відхилення ПК 1. Сигнал άп знімають з ДКШ 8. Одночасне вимірювання двох параметрів кутового руху ЛА відносно набігаючого потоку - αп та άп дозволяє підвищити точність керування апаратом за допомогою законів керування, що включають першу похідну від кута атаки, наприклад, ПДрегулятора: u=аαп×αп+аάп×άп, де u сигнал керування; аαп, аάп - коефіцієнти закону управлінця; t -час. Пряме вимірювання άп забезпечує точність, відповідну до класу приладної точності датчика кутової швидкості, і не призводить до збільшення похибок, яке властиве операції диференціювання. Завдяки прямому вимірюванню виключається потреба, щонайменше, в складних системах фільтрації та ідентифікації, причому вказані системи не гарантують високої точності визначення вказаного параметру. Таким чином вирішена поставлена задача розробки пристрою для стабілізації літального апарата відносно набігаючого потоку мінімальної складності і підвищеної точності. Джерела інформації 1. Пат. США №4026498, НПК 73-188,1979. 2. Пат. 2195415 Росія МКИ7 В64С13/18, G01P5/00, 2002. 3. Петров Б. Н., Крымов А. Б. Измерение углов атаки и скольжения с помощью моделей распределения давления на сферической лобовой поверхности // Известия вузов. Приборостроение. 1973. - №12. - С.5-9. 4. Пат. Великобританія 2275902 Α1Β64Д43/02. Авиационное устройство для расчета компенсированного угла атаки и рыскания для предупреждения срыва потока // Изобретения стран мира, 1996. - Вып.33 - №7. - С.5. 5. Оптимизация изделий ракетно-космической техники на основе совместного исследования процессов управления движением проектируемых объектов и нагружения их конструкций на атмосферном участке траекторий / В. Г. Динеев, А. Э. Колозезный, Э. А. Колозезный, В. А. Наумов, Η. Μ. Сергеев, В. Н. Чихарев / Космонавтика и ракетостроение. - 1997. - №10. С.76-87. 6. Определение углов атаки и скольжения по сигналам акселерометров, установленных на борту летательных аппаратов // Известия вузов. Приборостроение. - 1975. - №3. - С.62-67. 7. А. с. СРСР №728491, МПК3 G01Ρ13/00,1980. 5 Комп’ютерна верстка Т. Чепелева 87721 6 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for stabilization of aircraft relative to flow
Автори англійськоюDron’ Mykola Mykhailovych, Khorolskyi Petro Heorhiiovych
Назва патенту російськоюУстройство для стабилизации летательного аппарата относительно потока
Автори російськоюДронь Николай Михайлович, Хорольский Петр Георгиевич
МПК / Мітки
МПК: G01P 13/00, B64G 1/24
Мітки: стабілізації, апарата, руху, потоку, літального, пристрій, відносної
Код посилання
<a href="https://ua.patents.su/3-87721-pristrijj-dlya-stabilizaci-rukhu-litalnogo-aparata-vidnosno-potoku.html" target="_blank" rel="follow" title="База патентів України">Пристрій для стабілізації руху літального апарата відносно потоку</a>
Спосіб стабілізації літального апарата і пристрій для його реалізації
Номер патенту: 70873
Опубліковано: 10.01.2008
Автори: Хорольський Петро Георгійович, Пашков Анатолій Володимирович, Дронь Микола Михайлович, Гринчишин Юрій Леонідович
МПК: B64G 1/00, F42B 15/00
Мітки: спосіб, літального, реалізації, пристрій, стабілізації, апарата
Формула / Реферат:
1. Спосіб стабілізації літального апарата на атмосферній ділянці траєкторії, що полягає у заборі набігаючого потоку, формуванні направленого струменя для створення бокової тяги в зоні носової частини літального апарата, який відрізняється тим, що відслідковують площину просторового кута атаки за допомогою симетричної V-подібної аеродинамічної поверхні, розміщеної в носовій частині і звільненої для обертання навколо поздовжньої осі літального...
Пристрій для кутової стабілізації безпілотного літального апарата

Номер патенту: 29176
Опубліковано: 10.01.2008
Автори: Амеліна Ірина Вікторівна, Субота Анатолій Максимович, Симонов Володимир Федорович
МПК: G05D 1/03, B64C 13/00
Мітки: апарата, стабілізації, безпілотного, пристрій, кутової, літального
Формула / Реферат:
Пристрій для кутової стабілізації безпілотного літального апарата, що містить датчик відхилення кутового положення літального апарата від програмного значення, перетворювач аналог-код, форсуючу ланку, перший перетворювач код-аналог, рульовий привід органів керування, перший, другий, третій та четвертий блоки інтегрування, перший, другий та третій інвертори, перший і другий блоки виділення знака сигналу, блок визначення функції зсуву та...
Пульт, система та спосіб ручного керування та стабілізації регульованої величини руху літального апарата “аржесан”
Номер патенту: 26286
Опубліковано: 19.07.1999
Автор: Кашматов Віктор Йосипович
МПК: B64C 13/00
Мітки: пульт, система, регульованої, літального, руху, аржесан, апарата, ручного, керування, величини, стабілізації, спосіб
Формула / Реферат:
1. Пульт ручного управления и стабилизации регулируемой величины движения летательного аппарата, например воздушного судна, включающий стрелку и рукоятку, отличающийся тем, что стрелка выполнена в форме рукоятки и совмещена с нею, пульт ручного управления и стабилизации построен по схеме замкнутой системы непрямого регулирования положения рукоятки, которая (система) имеет вход и выход для связи с исполнительным контуром системы ручного...
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Паніна Алла Володимирівна, Симонов Володимир Федорович, Литвиненко Денис Володимирович
МПК: G05D 1/03
Мітки: стабілізації, система, безпілотного, літального, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Система стабілізації бокового каналу безпілотного літального апарата
Номер патенту: 36498
Опубліковано: 27.10.2008
Автори: Бондар Катерина Михайлівна, Жалніна Вікторія Василівна, Амелін Сергій Вікторович
МПК: G05D 1/03
Мітки: система, апарата, безпілотного, бокового, стабілізації, літального, каналу
Формула / Реферат:
Система стабілізації бокового каналу безпілотного літального апарата, що містить перший та другий порівнювальні пристрої, електронні ключі, сервопривід, вихід якого з'єднаний з входом об'єкта керування, а вхід - з виходом першого блока формування керуючих сигналів, датчик кута та датчик кутової швидкості, які послідовно з'єднані з виходами об'єкта керування, яка відрізняється тим, що до її складу введені нормуючі підсилювачі, входи яких...
Попередній патент: Спосіб виробництва фітосиропів
Наступний патент: Спосіб боротьби з ураженням іржею на бобових культурах, фунгіцидна суміш (варіанти)
Випадковий патент: Рефрактометр ока