Пристрій радіолокаційного розпізнавання надводних об’єктів
Номер патенту: 105980
Опубліковано: 10.07.2014
Автори: Миронов Павло Олександрович, Краснов Леонід Михайлович, Черменьова Ірина Петрівна, Миронов Олександр Федорович

Формула / Реферат
Пристрій радіолокаційного розпізнавання надводних об'єктів, що містить передавач, приймач, передавальну і приймальну антени і послідовно з'єднані перший змішувач, перший фільтр нижніх частот, другий змішувач, другий фільтр нижніх частот і керований генератор, причому вхід передавальної антени підключений до першого виходу передавача, другий вихід якого приєднаний до першого входу першого змішувача, до другого входу якого через приймач підключений вихід приймальної антени, який відрізняється тим, що воно доповнено мультивібратором, схемою формування керуючих напруг, комутатором, індикатором хитавиці і індикатором вібрації, причому інформаційний вхід комутатора підключений до загальної точки з'єднання виходу другого фільтра нижніх частот і керуючого входу керованого генератора, вихід мультивібратора підключений до керуючого входу комутатора і входом схеми управління режимом роботи керованого генератора, перший і другий виходи якої з'єднані відповідно з входом установки власної частоти керованого генератора і входом установки діапазону захоплення кільця ФАЧП, індикатор частоти хитавиці і індикатор частоти вібрації підключені до відповідних виходів комутатора.
Текст
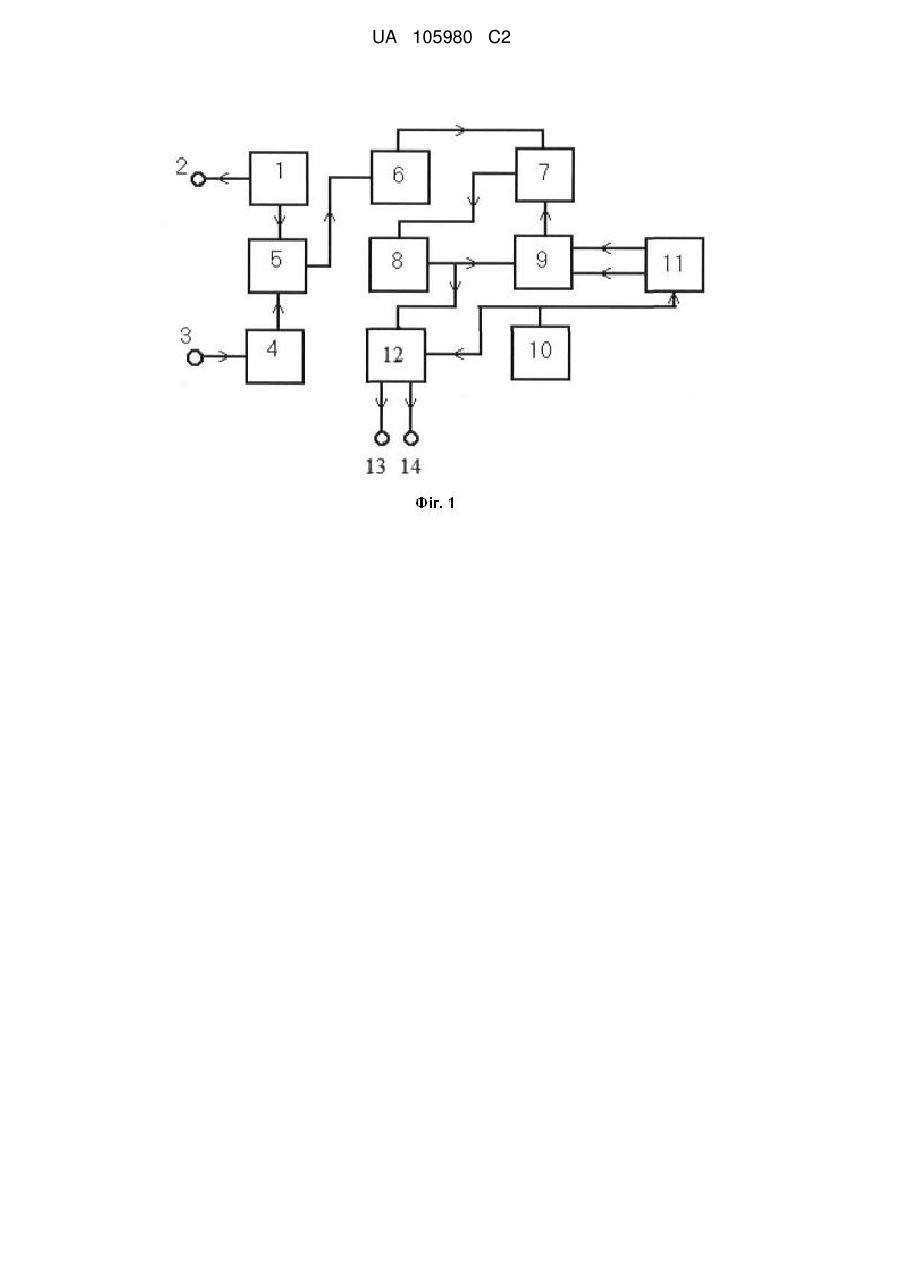
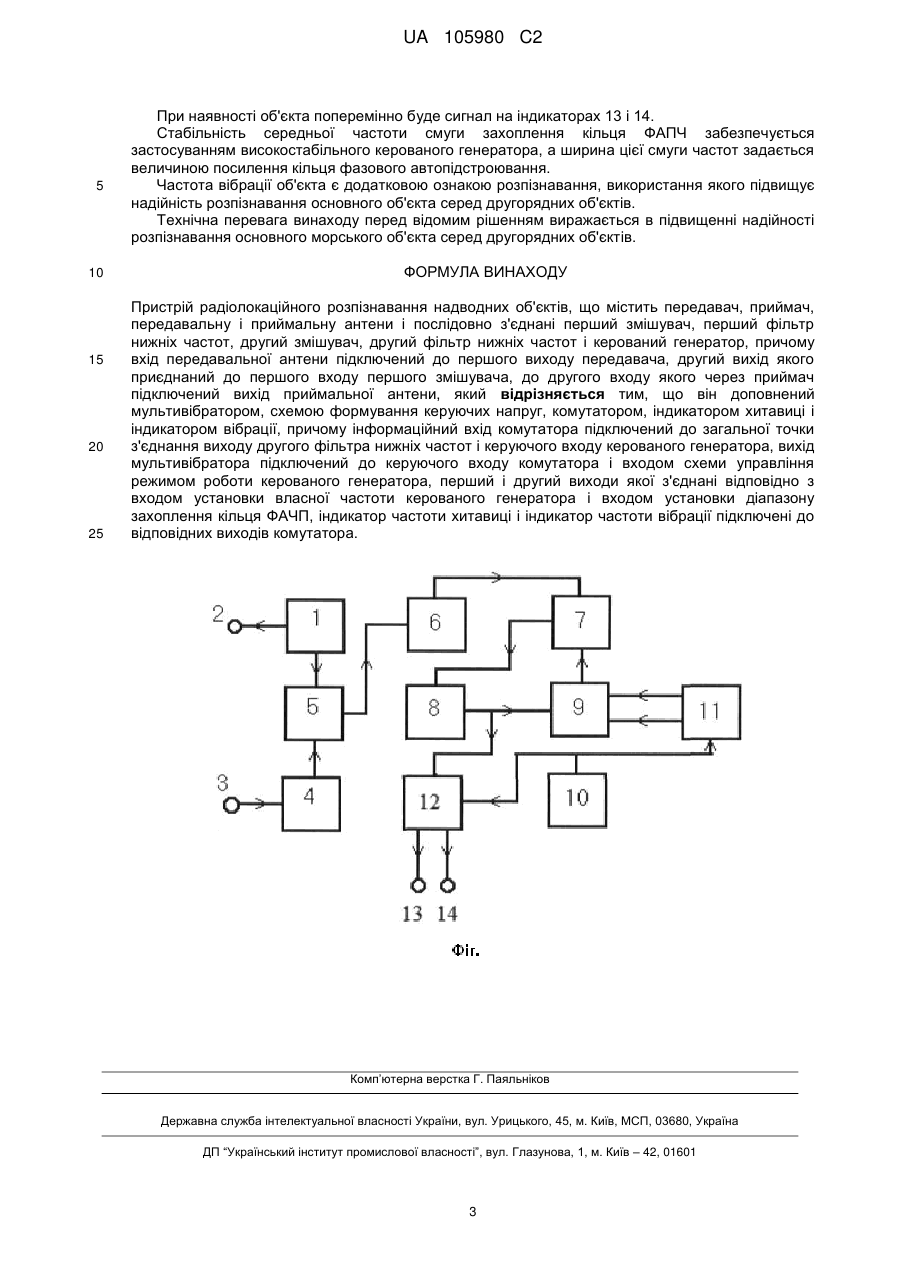
Реферат: Винахід належить до радіолокації і може бути використано в когерентних радіолокаційних станціях безперервного випромінювання для розпізнавання надводних об'єктів при наявності перешкод від фону поверхні розподілу і метеоутворень. Пристрій радіолокаційного розпізнавання надводних об'єктів містить передавач, приймач, передавальну і приймальну антени і послідовно з'єднані перший змішувач, перший фільтр нижніх частот, другий змішувач, другий фільтр нижніх частот і керований генератор. Винахід доповнено мультивібратором, схемою формування керуючих напруг, комутатором, індикатором хитавиці і індикатором вібрації. Винахід дозволяє підвищити надійності визначення типу морського об'єкту схильного до нерегулярної хитавиці на схвильованій поверхні моря. UA 105980 C2 (12) UA 105980 C2 UA 105980 C2 5 10 15 20 25 30 35 40 45 50 Винахід належить до радіолокації і може бути використаний в когерентних радіолокаційних станціях безперервного випромінювання для розпізнавання надводних об'єктів при наявності перешкод від фону поверхні розподілу і метеоутворень. Відомо пристрій аналогічного призначення, що містить приймач-передавач радіолокаційної станції і канал розпізнавання [Справочник по радиолокации. Под ред. М.Скольника, в четырех томах. Том 1. - М: Сов. радио, 1976. - С. 213, рис. 36.]. Основний недолік цього пристрою полягає в низькій надійності розпізнавання в умовах імітаційних перешкод від кутикових відбивачів, а також не дозволяє розпізнати основний морський об'єкт серед другорядних. Відомо другий пристрій аналогічного призначення, що містить передавач, приймач, передавальну і приймальну антени і послідовно включені змішувач, фільтр нижніх частот і пристрій відтворення образу об'єкта (за який можуть бути використані головні телефони), причому вхід передавальної антени підключений до першого виходу передавача, другий вихід якого приєднаний до першого входу змішувача, вихід приймальної антени через приймач підключено до другого входу змішувача [Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. - М.: Сов. радио, 1994. - С. 36, рис. 2.2]. Основний недолік цього пристрою полягає в низькій надійності розпізнавання в умовах імітаційних перешкод від кутикових відбивачів, а також не дозволяє розпізнати основний морський об'єкт серед другорядних об'єктів. Найбільш близьким за технічною суттю до винаходу є пристрій радіолокаційного розпізнавання об'єктів, що містить передавач, приймач, передавальну і приймальну антени і послідовно з'єднані перший змішувач, перший фільтр нижніх частот, другий змішувач, другий фільтр нижніх частот і керований генератор, причому вхід передавальної антени підключений до першого виходу передавача, другий вихід якого приєднаний до першого входу першого змішувача, вихід приймальної антени через приймач підключено до другого входу першого змішувача, а вихід керованого генератора з'єднаний з другим входом другого змішувача [Краснов Л.М., О.М. Баранов, B.C. Говоров, М.Ф. Братішко. Пристрій радіолокаційного розпізнавання об'єктів. Пат.24164А України, МКИ 6G01S 13/78. Заявл. 03.06.97. Опубл. 30.10.98, бюл. № 5.). Основний недолік цього пристрою полягає у відносно низькій надійності розпізнавання основного морського об'єкта серед другорядних об'єктів. В основу винаходу "Пристрій радіолокаційного розпізнавання об'єктів" поставлено задачу підвищення надійності розпізнавання основного морського об'єкта серед другорядних об'єктів. Ця задача вирішується тим, що пристрій радіолокаційного розпізнавання доповнено мультивібратором, схемою формування керуючих напруг і комутатором, що підвищує надійність виділення основного об'єкта серед другорядних об'єктів. Викладена суть винаходу пояснюється структурною схемою, зображеної на фіг. В його склад входять: передавач 1, передавальна антена 2, приймальна антена 3, приймач 4 і послідовно з'єднані перший змішувач 5, перший фільтр нижніх частот 6, другий змішувач 7, другий фільтр нижніх частот 8, і керований генератор 9, а також мультивібратор 10, схема формування керуючих напруг 11, комутатор 12, індикатор хитавиці 13 і індикатор вібрації 14, причому вхід передавальної антени 2 підключений до першого виходу передавача 1, другий вихід якого приєднаний до першого входу першого змішувача 5, до другого входу якого через приймач 4 підключений вихід приймальній антени 3, інформаційний вхід комутатора 12 підключений до загальної точки з'єднання виходу другого фільтра нижніх частот 8 і керуючого входу керованого генератора 9, вихід мультивібратора підключений до керуючого входу комутатора 12 і до керуючого входу схеми формування керуючих напруг 9, перший і другий виходи якої з'єднані відповідно з входом установки власної частоти керованого генератора 9 і входом установки його діапазону захоплення, індикатор частоти хитавиці 13 і індикатор частоти вібрації 14 підключені до відповідних виходів комутатора 12. Пристрій працює наступним чином. Передавач 4 через антену 2 випромінює зондуючий сигнал. u1 U1 cos 2f0 t i, (1) де 55 U1 , і f0 - амплітуда і несуча частота зондуючого сигналу. Як тверде тіло надводна ціль характеризується поступальним рухом x( t ) , кутами нахилу на хитавиці: ( t ) A 0 sin( 0 t ) , (2) 1 UA 105980 C2 де A 0 і 0 - амплітуда і власна частота хитавиці об'єкта, і вібропереміщення об'єкта, зумовлені роботою двигуна і лопатей: z( t ) Z 0 sin( вібр t ) , (3) де Z 0 і вібр - амплітуда і частота. 5 Швидкість Vi і-ої ЛОР складається з радіальних складових трьох швидкостей: швидкості Vx ходу, швидкості Vir , обумовленої обертальним рухом об'єкта на хитавиці і швидкості Vвібр вібрації об'єкта: Vi Vx Vir Vвідб . (5) Складова 10 15 Vir визначається як Vir ri ri A 0 0 cos( 0 t ) , (6) де ri - відстань і-ої ЛОР від осі обертання об'єкта, - частота хитавиці об'єкта, обумовлена як похідна кута повороту (2) об'єкта за часом d / dt . Складова Vвідб визначається як похідна вібропереміщення (3) за часом: З урахуванням (4), (5), (6) і (7) доплеровська частота луна-сигналу від і-ої ЛОР визначається виразом fd i 2 Vx ri A 0 0 cos( 0 t) Z 0 вібр cos( вібрt. (8) 0 Таким чином, луна-сигнал від складної поверхні можна записати в наступному вигляді N 2 Vx ri A 0 0 cos(0 t) Z0 вібр cos(вібрt)t . (9) S( t ) A i cos 2f0 0 i1 20 Цей сигнал вловлюється приймальною антеною 3, посилюється приймачем 4, надходить на другий вхід змішувача 5, на перший вхід якого з другого виходу передавача 2 надходить ослаблена копія зондуючого сигналу (1). В результаті з виходу першого фільтра нижніх частот (ФНЧ) 6 знімається напруга N u 6 ( t ) Ui cos i1 25 30 35 40 45 4 Vx ri A 0 0 cos 0 t Z 0 вібр cos( вібрt )t , (10) 0 яке надходить на перший вхід другого змішувача 7, на другий вхід якого з виходу керованого генератора надходить напруга u 9 ( t ) U9 sin q t , (11) де U 9 та q - амплітуда і частота напруги на виході керованого генератора 9. Кільце фазового автопідстроювання частоти (ФАПЧ), в яке входять другий змішувач 7, другий ФНЧ 8 і керований генератор 9, має певну смугу захоплення q min q q max . (12) Керований генератор 9 працює поперемінно в одному з двох режимів: 1) режим виділення частоти хитавиці; 2) режим виділення частоти вібрації об'єкта. У першому режимі величини верхньої та нижньої межі смуги захоплення кільця ФАПЧ вибираються таким чином, щоб в цю смугу потрапили всі власні частоти хитавиці основного об'єкта, відповідні його різним курсовим кутам. Власна частота генератора 9 дорівнює середній частоті цієї смуги захоплення. У другому режимі смуга захоплення визначається частотами вібрації вала, кількістю лопатей і ходовими вібраціями об'єкта, викликаними схвильованої поверхнею моря, а власна частота генератора 9 дорівнює середньому значенню смуги частот вібрацій об'єкта. Режим роботи генератора 9 визначається двома керуючими напругами, які надходять від схеми формування керуючих напруг 11. Перша з цих напруг подається на вхід установки власної частоти генератора 9, а друга - на вхід установки ширини смуги захоплення кільця ФАПЧ. При позитивній полярності напруги на виході мультивібратора 10, генератор 9 працює в першому режимі, а при негативної полярності - в другому режимі. При цьому напруга на виході другого ФНЧ 8 залежно від ситуації може приймати два рівні: високий рівень - якщо основний об'єкт потрапляє в зону огляду РЛС, або низький рівень - у разі відсутності основного об'єкта в зоні огляду РЛС. 2 UA 105980 C2 5 10 15 20 25 При наявності об'єкта поперемінно буде сигнал на індикаторах 13 і 14. Стабільність середньої частоти смуги захоплення кільця ФАПЧ забезпечується застосуванням високостабільного керованого генератора, а ширина цієї смуги частот задається величиною посилення кільця фазового автопідстроювання. Частота вібрації об'єкта є додатковою ознакою розпізнавання, використання якого підвищує надійність розпізнавання основного об'єкта серед другорядних об'єктів. Технічна перевага винаходу перед відомим рішенням виражається в підвищенні надійності розпізнавання основного морського об'єкта серед другорядних об'єктів. ФОРМУЛА ВИНАХОДУ Пристрій радіолокаційного розпізнавання надводних об'єктів, що містить передавач, приймач, передавальну і приймальну антени і послідовно з'єднані перший змішувач, перший фільтр нижніх частот, другий змішувач, другий фільтр нижніх частот і керований генератор, причому вхід передавальної антени підключений до першого виходу передавача, другий вихід якого приєднаний до першого входу першого змішувача, до другого входу якого через приймач підключений вихід приймальної антени, який відрізняється тим, що він доповнений мультивібратором, схемою формування керуючих напруг, комутатором, індикатором хитавиці і індикатором вібрації, причому інформаційний вхід комутатора підключений до загальної точки з'єднання виходу другого фільтра нижніх частот і керуючого входу керованого генератора, вихід мультивібратора підключений до керуючого входу комутатора і входом схеми управління режимом роботи керованого генератора, перший і другий виходи якої з'єднані відповідно з входом установки власної частоти керованого генератора і входом установки діапазону захоплення кільця ФАЧП, індикатор частоти хитавиці і індикатор частоти вібрації підключені до відповідних виходів комутатора. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKrasnov Leonid Mykhailovych, Myronov Oleksandr Fedorovych
Автори російськоюКраснов Леонид Михайлович, Миронов Александр Федорович
МПК / Мітки
МПК: G01S 13/78
Мітки: об'єктів, надводних, пристрій, розпізнавання, радіолокаційного
Код посилання
<a href="https://ua.patents.su/5-105980-pristrijj-radiolokacijjnogo-rozpiznavannya-nadvodnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій радіолокаційного розпізнавання надводних об’єктів</a>
Пристрій радіолокаційного розпізнавання об’єктів

Номер патенту: 24164
Опубліковано: 07.07.1998
Автори: Баранов Олександр Миколайович, Краснов Леонід Михайлович, Говоров Валентін Сергійович, Братішко Микола Федорович
МПК: G01S 13/78
Мітки: радіолокаційного, об'єктів, пристрій, розпізнавання
Формула / Реферат:
Устройство радиолокационного распознавания объектов, содержащее передатчик, приемник, передающую и приемную антенны и последовательно соединенные первый смеситель, первый фильтр нижних частот и устройство воспроизведения образа объекта, причем вход передающей антенны подключен к первому выходу передатчика, второй выход которого подсоединен к первому входу первого смесителя, выход приемной антенны через приемник подключен ко второму входу...
Спосіб радіолокаційного розпізнавання об’єктів
Номер патенту: 17731
Опубліковано: 16.10.2006
Автори: Булай Андрій Миколайович, Обод Іван Іванович, Овсянніков Петро Васильович
МПК: G01S 13/00
Мітки: радіолокаційного, розпізнавання, спосіб, об'єктів
Формула / Реферат:
Радіолокаційний спосіб розпізнавання об’єктів, який полягає в тому, що запитником випромінюють кодовий сигнал запиту, код якого визначають за кодом шкали часу системи розпізнавання, який приймають відповідачем, порівнюють його з діючим кодовим сигналом запиту у даний момент часу, код сигналу відповіді визначають за кодом шкали часу системи розпізнавання, який приймають запитником і порівнюють його з діючим кодовим сигналом відповіді у даний...
Пристрій для розпізнавання випадкових процесів

Номер патенту: 25008
Опубліковано: 25.07.2007
Автори: Рябова Любов Володимирівна, Глухимчук Михайло Іванович, Ярова Яна Сергіївна, Подгорний Євген Іванович
МПК: G06F 15/00
Мітки: процесів, випадкових, пристрій, розпізнавання
Формула / Реферат:
Пристрій для розпізнавання випадкових процесів, що містить два елементи затримки, блок віднімання, блок вибору максимуму, формувач квадрата першого статистичного моменту і блок ділення, який відрізняється тим, що додатково введені фільтр, інвертор, другий квадратичний формувач, два блоки підсумовування та чотиривходовий блок прийняття рішень, причому загальний вхід пристрою розпізнавання паралельно підключений до першого входу блока...
Радіочастотний пристрій прийомопередавання фазоманіпульованих сигналів
Номер патенту: 67235
Опубліковано: 10.02.2012
Автори: Лімаренко Павло Васильович, Зеленін Анатолій Миколайович
МПК: H04B 1/38
Мітки: фазоманіпульованих, радіочастотний, пристрій, прийомопередавання, сигналів
Формула / Реферат:
Радіочастотний пристрій прийомопередавання фазоманіпульованих сигналів, що містить модулятор, опорний генератор, генератор, керований напругою проміжної частоти, синтезатор проміжної частоти, змішувач сигналів, малошумливий підсилювач, перемикач "прийом-передача" та прийомопередавальну антену, причому перший вхід модулятора з'єднано з клемою входу пристрою, другий вхід з'єднано з виходом генератора, керованого напругою проміжної...
Пристрій підповерхневого радіолокаційного зондування
Номер патенту: 61650
Опубліковано: 11.06.2007
Автори: Дорохова Людмила Миколаївна, Сугак Володимир Григорович, Чернишов Сергій Іванович
МПК: G01S 13/02, G01V 3/12
Мітки: зондування, пристрій, радіолокаційного, підповерхневого
Формула / Реферат:
1. Пристрій підповерхневого радіолокаційного зондування, який містить генератор частотно-модульованого сигналу, підсилювач потужності, відгалужувач, вхід якого з'єднаний з виходом підсилювача потужності, перший і другий фільтри, перший і другий високочастотні перемикачі, перший змішувач, вхід якого з'єднаний з першим виводом першого високочастотного перемикача, першу і другу антени, виконані з можливістю прийому сигналів з ортогональним...
Попередній патент: Пристрій для транспортування плазмових потоків від вакуумно-дугових джерел плазми до вихідного отвору
Наступний патент: Рулонний прес-підбирач
Випадковий патент: Метаболіти транскломіфену і їх застосування