Спосіб керування рекуперацією енергії для тягових електропередач змінного струму моторовагонних автономних поїздів

Формула / Реферат
Спосіб керування рекуперацією енергії для тягових електропередач змінного струму моторовагонних автономних поїздів, який полягає у тому, що генерована електрична енергія системи через перетворювач живлення, що виконаний з можливістю передачі електроенергії рекуперації до мережі електропостачання при гальмуванні, передається до живлячої мережі, який відрізняється тим, що перетворювач встановлюють безпосередньо на автономному поїзді, а вхідний сигнал керування цим перетворювачем є вихідним сигналом блока нейромережного керування та корекції, де вхідний сигнал даного блока, що задають сторонньою системою керування, проходить через вузол спеціальної корекції, причому вузол спеціальної корекції змінює величину сигналу тільки при оптимальному співвідношенні повної потужності рухомого складу, а в противному випадку вхідний сигнал даного вузла подають на його вихід без змін, при цьому вихідний сигнал вузла спеціальної корекції подають на вхід вузла нейромережного керування, де він проходить через внутрішній контур самонавчання або внутрішній контур стороннього навчання системи керування в залежності від сигналу перемикання між контурами, де формують масив сигналів оптимального прогнозного значення параметрів руху поїзда та сигналів керування тяговим перетворювачем, а значення повної потужності рухомого складу розраховують безпосередньо у вузлі спеціальної корекції на основі вхідних сигналів від датчиків системи тягової електропередачі та вхідного сигналу з масивом інформації про параметри профілю залізничного шляху, при цьому даний сигнал з масивом інформації формують внутрішнім контуром стороннього навчання системи керування, де закладена детальна схема профілю залізничного шляху певного маршруту руху.
Текст
Реферат: Спосіб керування рекуперацією енергії для тягових електропередач змінного струму моторовагонних автономних поїздів належить до галузі електротехніки, а саме до частотнокерованих електропередач змінного струму автономного рухомого складу залізниць. В основу винаходу поставлено задачу створення способу керування рекуперацією енергії для тягових електропередач змінного струму моторовагонних автономних поїздів з можливістю самонавчання або стороннього навчання системи керування на основі нейронних мереж або інших алгоритмів навчання, а також застосування способу при оптимальному співвідношенні повної енергії та швидкості рухомого складу. Технічним результатом є здійснення рекуперації енергії згідно з оптимальними режимами руху поїзда на основі навчання на даній ділянці системи керування шляхом ведення поїзду на основі розрахункових карт руху. UA 106955 C2 (12) UA 106955 C2 UA 106955 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі електротехніки, конкретно - стосується частотно-керованих електропередач змінного струму автономного рухомого складу залізниць. Відомий спосіб рекуперації енергії гальмування машини [1], який полягає у тому, що безпосередній обмін кінетичною енергією між маховиком і трансмісією машини здійснюють з метою підтримки постійного сумарного значення кінетичної енергії маховика і машини механічним шляхом зміною передавального відношення варіатора з числом ступенів свободи, рівним одиниці, який з'єднує трансмісію і маховик, причому обмін кінетичною енергією між маховиком і трансмісією машини здійснюють зміною передавального відношення диференціала з числом ступенів свободи, що дорівнює двом, який з'єднує трансмісію, маховик і дві оборотні електричні машини, механічним шляхом і додатково електромеханічним перетворенням механічної енергії в електричну, а потім перетворенням електричної енергії в механічну. Недоліком відомого способу є складність технічної реалізації, наявність складних механічних перетворювачів, які знижують надійність системи, зменшують коефіцієнт корисної дії системи рекуперації. Прототипом вибрано спосіб рекуперації енергії при гальмуванні залізничного транспорту [2], який полягає в тому, що генерована електрична енергія системи пропускається через електричний перетворювач передачі електричної енергії від живильної лінії у режимі регенерації на перетворювач підстанції, а підстанції пов'язані з зоною виділення гальмівної енергії, яка має свої межі, що визначаються певною відстанню розташованих з боків точки підключення пунктів. Відстань визначається поділом різниці між непостійних максимальних напруг і мінімального значення добутку лінійного опору лінії і максимальної інтенсивності руху поїздів. Мінімальне значення приймається таким, що відстань більше або дорівнює половині відстані між підстанцій. Недоліками прототипу є відсутність можливості самонавчання або стороннього навчання системи керування на основі нейронних мереж або інших алгоритмів навчання, неможливість застосування способу при оптимальному співвідношенні повної енергії та швидкості рухомого складу. В основу винаходу поставлено задачу створення способу керування рекуперацією енергії для тягових електропередач змінного струму моторовагонних автономних поїздів з можливістю самонавчання або стороннього навчання системи керування на основі нейронних мереж або інших алгоритмів навчання, а також застосування способу при оптимальному співвідношенні повної енергії та швидкості рухомого складу. Вирішення цієї задачі досягається тим, що створено спосіб керування рекуперацією енергії для тягових електропередач змінного струму моторвагонних автономних поїздів, який полягає у тому, що генерована електрична енергія системи через перетворювач живлення, що виконаний з можливістю передачі електроенергії рекуперації до мережі електропостачання при гальмуванні, передається до живлячої мережі, причому даний перетворювач встановлено безпосередньо на автономному поїзді, а вхідний сигнал керування цим перетворювачем є вихідним сигналом блока нейромережного керування та корекції, де вхідний сигнал даного блока, що задається сторонньою системою керування, проходить через вузол спеціальної корекції, причому вузол спеціальної корекції змінює величину сигналу тільки при оптимальному співвідношенні повної потужності рухомого складу, а в противному випадку вхідний сигнал даного вузла подається на його вихід без змін; вихідний сигнал вузла спеціальної корекції подається на вхід вузла нейромережного керування, де він проходить через внутрішній контур самонавчання або внутрішній контур стороннього навчання системи керування (в залежності від сигналу перемикання між контурами), де формується масив сигналів оптимального прогнозного значення параметрів руху поїзда та сигналів керування тяговим перетворювачем; значення повної потужності рухомого складу розраховується безпосередньо у вузлі спеціальної корекції на основі вхідних сигналів від датчиків системи тягової електропередачі та вхідного сигналу з масивом інформації про параметри профілю залізничного шляху, причому даний сигнал з масивом інформації формується внутрішнім контуром стороннього навчання системи керування, де закладена детальна схема профілю залізничного шляху певного маршруту руху. Введення системи керування перетворювачем з можливістю самонавчання або стороннього навчання системи керування на основі нейронних мереж або інших алгоритмів навчання, а також застосування способу при оптимальному співвідношенні повної енергії та швидкості рухомого складу дозволяє здійснювати рекуперацію енергії згідно з оптимальними режимами руху поїзда на основі навчання на даній ділянці системи керування шляхом ведення поїзду досвідченим машиністом або на основі розрахункових карт руху. Таким чином, нові ознаки при взаємодії з відомими ознаками забезпечують виявлення нових технічних властивостей - шляхом введення нових операцій розроблено спосіб керування 1 UA 106955 C2 5 10 15 рекуперацією енергії для тягових електропередач змінного струму моторвагонних автономних поїздів. Це забезпечує усій заявленій сукупності ознак способу відповідність критерію "Новизна". Аналоги, які містять ознаки, що відрізняються від прототипу, не знайдені; рішення явним чином не випливає з рівня техніки. Виходячи з вищевикладеного можна зробити висновок, що запропоноване технічне рішення задовольняє критерію "Винахідницький рівень". Запропонований спосіб працює таким чином. Система керування тяговим перетворювачем генерує сигнал керування, в залежності від позиції командоконтролера машиніста. Даний сигнал проходить через вузол спеціальної корекції, який змінює величину сигналу тільки при оптимальному співвідношенні повної потужності рухомого складу, а в противному випадку вхідний сигнал даного вузла подається на його вихід без змін. Оптимальні співвідношення повної потужності рухомого складу визначаються виразами в залежності від режиму руху: 1. В режимі тяги повна потужність Pt , що споживається поїздом може бути знайдена з виразу Pt PM PV.P. PK PVtrat , (1) де PM - потужність, що витрачається на виконання механічної роботи з переміщення поїзда; PV.P. - потужність системи власних потреб; 20 25 30 35 40 45 50 PK - потужність, що споживається пристроями забезпечення комфорту; PVtrat - сукупна потужність втрат (механічні, електричні, магнітні, теплові втрати у двигунах, перетворювачах та системах електропостачання, інших механічних та електричних елементах тягової електропередачі, зубчастих передачах, шестернях та колісних парах, тощо). Потужність, що витрачається на виконання механічної роботи з переміщення поїзда залежить від швидкості руху та дотичної сили тяги FD , що реалізується тяговою електропередачею: PM FD , (2) яка також визначається зміною кінетичної та потенціальної енергій. і дією при цьому сил тертя при подоланні основного опору руху та опору при проходженні кривих: PM Pter Pkin Ppot , (3) де Pter - потужність, що витрачається на подолання сил тертя; Pkin - потужність, що витрачається на зміну кінетичної енергії рухомого складу; Ppot - потужність, що витрачається на зміну потенціальної енергії рухомого складу. 2. В режимі вибігу потужність споживається системою власних потреб та пристроями забезпечення комфорту, тобто повна потужність PV , що споживається дизель-поїздом може бути знайдена з виразу PV PV.P. PK PVtrat _ V , (4) де PVtrat _ V - потужність втрат в режимі вибігу. При цьому має місце співвідношення: Pter Pkin Ppot 0 . (5) 3. В режимі гальмування з гасінням енергії гальмівними пристроями, де мають місце додаткові втрати потужності в гальмівних пристроях та колах Pgal повна потужність PG знаходиться аналогічно до (4) з виразу: PG PV.P. PK PVtrat _ G , (6) де PVtrat _ G - потужність втрат в режимі гальмування. При цьому має місце співвідношення: Pter Pgal Pkin Ppot , (7) 4. В режимі рекуперативного гальмування на шкідливих уклонах при спуску має місце співвідношення: Ppot Pter PVtrat PV.P. PK Prek , (8) де Prek - потужність енергії рекуперації. 5. При гальмуванні до повної зупинки: Ppot Pkin Pter PVtrat PV.P. PK Prek . (9) 2 UA 106955 C2 5 10 15 20 25 30 35 40 45 50 Значення повної потужності рухомого складу на основі наведених співвідношень (1)-(9) розраховується безпосередньо у вузлі спеціальної корекції на основі вхідних сигналів від датчиків системи тягової електропередачі та сигналу з масивом інформації про параметри профілю залізничного шляху, причому даний масив інформації формується внутрішнім контуром стороннього навчання системи керування, де закладена детальна схема профілю залізничного шляху певного маршруту руху. Далі вихідний сигнал вузла спеціальної корекції подається на вхід вузла нейромережного керування, де він проходить через внутрішній контур самонавчання або внутрішній контур стороннього навчання системи керування (в залежності від сигналу перемикання між контурами). Сформований вихідний сигнал блоку нейромережного керування подається на тяговий перетворювач, який, в залежності від значення цього сигналу, передає генеровану електричну енергію системи тягової електропередачі до внутрішньої мережі електропостачання при гальмуванні або при русі поїзда в режимі вибігу. Виходячи з вищевикладеного можна зробити висновок, що технічне рішення, яке заявляється, задовольняє критерію "Промислове застосування". Джерела інформації: 6 1. Пат. 2010109031 Россия, МПК F16H33/00. СПОСОБ РЕКУПЕРАЦИИ ЭНЕРГИИ ТОРМОЖЕНИЯ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ [Текст] / Леонов И.В., Барабашов Н.Н.; - заявл. 12.03.10. 2. Пат. ЕР1985490 Франція, МПК B60L7/10; В60М3/06. Системы, подстанции и метод рекуперации энергии при торможении железнодорожного транспорта, железнодорожные транспортные средства для этой системы. System, substation and method for recovering brake energy from railway vehicles, railway vehicles for this system [Електроний ресурс] / CORNIC DANIEL [FR]; AUTHIE PIERRE [FR]; TAYAT FARADJ [FR]; заявник і патентовласник ALSTOM TRANSPORT SA [FR]; заявл. 25.04.2007; опубл. 29.10.2008; ЕР1985490. - Режим доступу: http://worldwide.espacenet.com/publicationDetails/biblio?FT=D&date=20081 029&DB=&locale=en_EP&CC=EP&NR=1985490A1&KC=A1&ND=3. ФОРМУЛА ВИНАХОДУ Спосіб керування рекуперацією енергії для тягових електропередач змінного струму моторовагонних автономних поїздів, який полягає у тому, що генерована електрична енергія системи через перетворювач живлення, що виконаний з можливістю передачі електроенергії рекуперації до мережі електропостачання при гальмуванні, передається до живлячої мережі, який відрізняється тим, що перетворювач встановлюють безпосередньо на автономному поїзді, а вхідний сигнал керування цим перетворювачем є вихідним сигналом блока нейромережного керування та корекції, де вхідний сигнал даного блока, що задають сторонньою системою керування, проходить через вузол спеціальної корекції, причому вузол спеціальної корекції змінює величину сигналу тільки при оптимальному співвідношенні повної потужності рухомого складу, а в противному випадку вхідний сигнал даного вузла подають на його вихід без змін, при цьому вихідний сигнал вузла спеціальної корекції подають на вхід вузла нейромережного керування, де він проходить через внутрішній контур самонавчання або внутрішній контур стороннього навчання системи керування в залежності від сигналу перемикання між контурами, де формують масив сигналів оптимального прогнозного значення параметрів руху поїзда та сигналів керування тяговим перетворювачем, а значення повної потужності рухомого складу розраховують безпосередньо у вузлі спеціальної корекції на основі вхідних сигналів від датчиків системи тягової електропередачі та вхідного сигналу з масивом інформації про параметри профілю залізничного шляху, при цьому даний сигнал з масивом інформації формують внутрішнім контуром стороннього навчання системи керування, де закладена детальна схема профілю залізничного шляху певного маршруту руху. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKulahin Dmytro Oleksandrovych
Автори російськоюКулагин Дмитрий Александрович
МПК / Мітки
МПК: H02M 7/12, B60L 7/00, B60L 15/00
Мітки: струму, рекуперацією, керування, електропередач, енергії, спосіб, поїздів, моторовагонних, змінного, автономних, тягових
Код посилання
<a href="https://ua.patents.su/5-106955-sposib-keruvannya-rekuperaciehyu-energi-dlya-tyagovikh-elektroperedach-zminnogo-strumu-motorovagonnikh-avtonomnikh-pozdiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування рекуперацією енергії для тягових електропередач змінного струму моторовагонних автономних поїздів</a>
Пристрій для обліку повної енергії в мережах змінного струму
Номер патенту: 30279
Опубліковано: 15.11.2000
Автори: Ткаченко Сергій Васильович, Стрижак Василь Дем'янович, Маслов Володимир Єлисеєвич
МПК: G01R 11/54
Мітки: змінного, пристрій, струму, мережах, повної, обліку, енергії
Формула / Реферат:
Пристрій для обліку повної енергії в мережах змінного струму, який складається з однофазного лічильника активної енергії, випрямляча, згладжуючого фільтра, зворотного перетворювача, який відрізняється тим, що струмова обмотка лічильника вмикається безпосередньо в коло навантаження, а обмотка напруги - в мережу через випрямляч, згладжуючий фільтр і зворотний перетворювач напруги, роль якого виконує інвертор напруги.
Система керування тяговим електроприводом змінного струму рудникових електровозів
Номер патенту: 20092
Опубліковано: 15.01.2007
Автори: Сінчук Олег Миколайович, Зайцев Ігор Миколайович, Караманиць Федір Іванович, Сінчук Ігор Олегович, Лебьодкін Сергій Вікторович, Гузов Едуард Семенович
МПК: H02M 5/00
Мітки: струму, змінного, електровозів, тяговим, електроприводом, система, керування, рудникових
Формула / Реферат:
Система керування тяговим електроприводом змінного струму рудникових електровозів, що містить пульт керування машиніста, з'єднувальні проводи, блок захисту і контролю роботи електроустаткування, два тягові асинхронні двигуни, яка відрізняється тим, що система керування забезпечена багаторівневим інвертором напруг з автономним джерелом живлення, при цьому багаторівневий інвертор включає електрично зв'язані з пультом керування два інверторні...
Спосіб визначення споживання енергії у колах змінного струму і пристрій для його здійснення
Номер патенту: 28106
Опубліковано: 16.10.2000
Автори: Кліменко Володимир Миколайович, Войцешко Юрій Васильович, Клісенко Сергій Володимирович, Ганопольський Михайло Ісакович, Ружніков Євген Володимирович, Лісняк Олександр Григорович, Заславський Олександр Михайлович
МПК: G01R 21/06
Мітки: змінного, енергії, струму, колах, здійснення, визначення, споживання, пристрій, спосіб
Формула / Реферат:
1. Спосіб визначення споживання енергії у колах змінного струму, який включає почергову вибірку через задані інтервали часу миттєвих значень струму і напруги у колі, перетворення вибірок у цифрові сигнали, пропорційні вибраним значенням, запам'ятовування отриманих цифрових сигналів, обчислення миттєвих значень потужності з наступним усередненням протягом заданого інтервалу часу, який відрізняється тим, що послідовність вибірки миттєвих...
Пристрій аварійного керування тяговою частотно-керованою передачею змінного струму автономного локомотива
Номер патенту: 79924
Опубліковано: 13.05.2013
Автор: Кулагін Дмитро Олександрович
МПК: H02P 5/00
Мітки: пристрій, керування, автономного, змінного, струму, локомотива, передачею, аварійного, тяговою, частотно-керованою
Формула / Реферат:
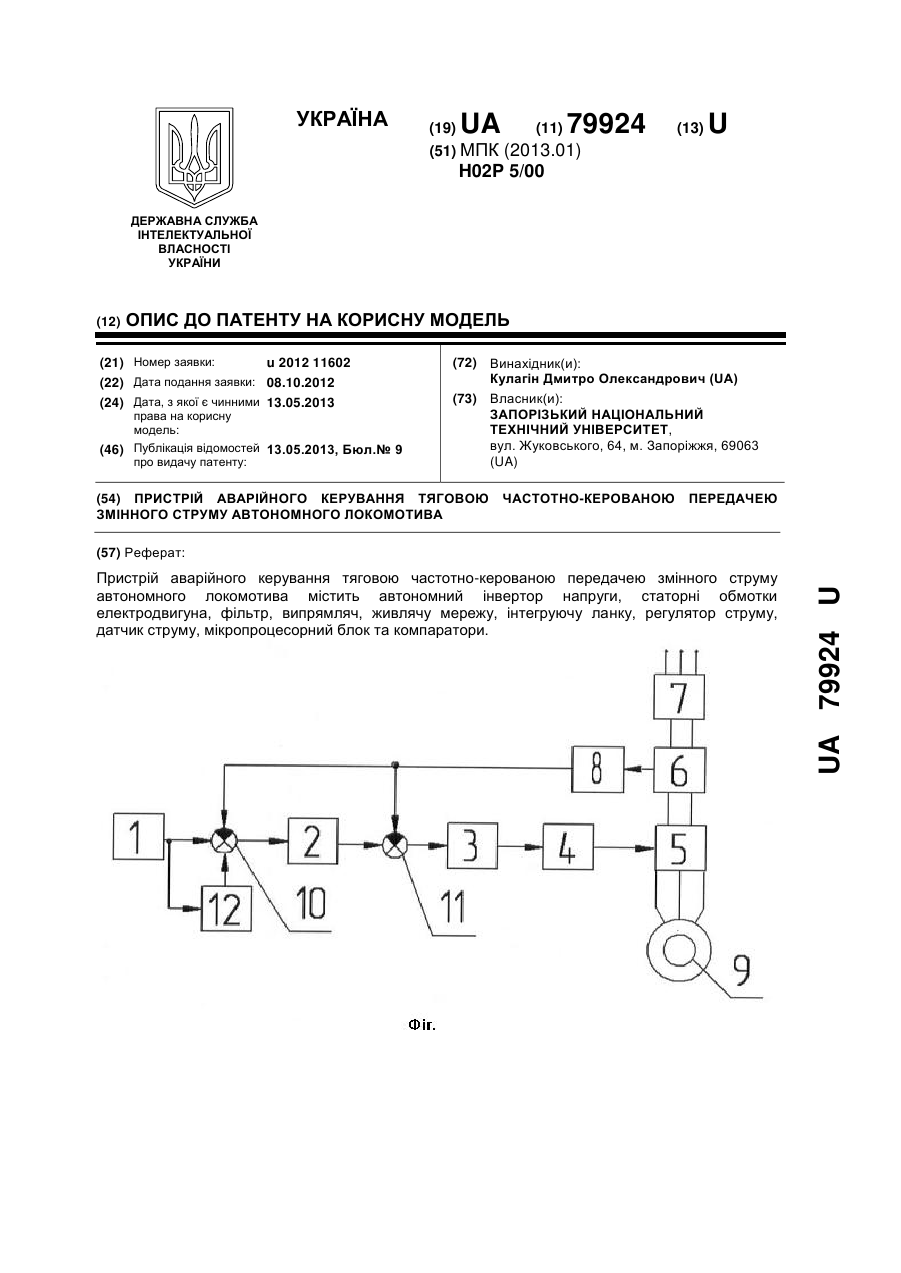
Пристрій аварійного керування тяговою частотно-керованою передачею змінного струму автономного локомотива, що містить автономний інвертор напруги, вихід якого підключено до статорних обмоток електродвигуна, а на вході якого встановлено фільтр, який підключено до виходу випрямляча, вхід якого підключено до живлячої мережі, інтегруючу ланку, вхід якої підключено до вузла завдання, а вихід якої підключено до регулятора струму, вхід якого...
Пристрій для керування трифазним двигуном змінного струму
Номер патенту: 75708
Опубліковано: 15.05.2006
Автор: Сємідєл Сергій Павлович
МПК: H02P 27/02
Мітки: трифазним, двигуном, струму, пристрій, керування, змінного
Формула / Реферат:
1. Пристрій для керування трифазним двигуном змінного струму, що містить вхідний фільтр, під'єднаний до джерела живлення, випрямляч, побудований на некерованих напівпровідникових ключах з його фільтруючою ланкою, трифазний транзисторний інвертор з системою керування, виходи якого безпосередньо зв'язані з контактами для підключення трифазного двигуна змінного струму та датчик струму ланки постійного струму, вихідний сигнал якого надходить на...
Попередній патент: Електродне покриття для зварювання та наплавлення олов’яних бронз
Наступний патент: Спосіб лікування діабетичної ретинопатії
Випадковий патент: Спосіб підвищення тиску газу в розподільних газопроводах і газопроводах-відводах