Спосіб підвищення точності вимірювання азимута радіолокаційних систем з активною відповіддю
Номер патенту: 108122
Опубліковано: 11.07.2016
Автори: Мельниченко Віктор Миколайович, Семенов Дмитро Сергійович, Терешенков Віктор Михайлович, Лаврентьєв Володимир Миколайович

Формула / Реферат
Спосіб підвищення точності вимірювання азимута радіолокаційних систем з активною відповіддю, який полягає в тому, що посилають запит повітряним судам в різних режимах, приймають відповідні радіолокаційні сигнали за допомогою гостроспрямованої і слабоспрямованої антен, їх фільтрують і підсилюють, а потім порівнюють рівні сигналів, прийнятих гостроспрямованою і слабоспрямованою антенами, і оцінюють напрями приходу сигналів, прийнятих гостроспрямованою антеною, у разі їх перевищення над сигналами, прийнятими слабоспрямованою антеною, який відрізняється тим, що поріг порівняння формують шляхом оцінки рівня сигналу, прийнятого слабоспрямованою антеною, вибирають відповідно до отриманої оцінки один із заздалегідь розрахованих коефіцієнтів, величина якого залежить від рівня сигналу, прийнятого слабоспрямованою антеною, і крутизни діаграми спрямованості основної антени, і помножують сигнали, прийняті слабоспрямованою антеною, на вибраний коефіцієнт.
Текст
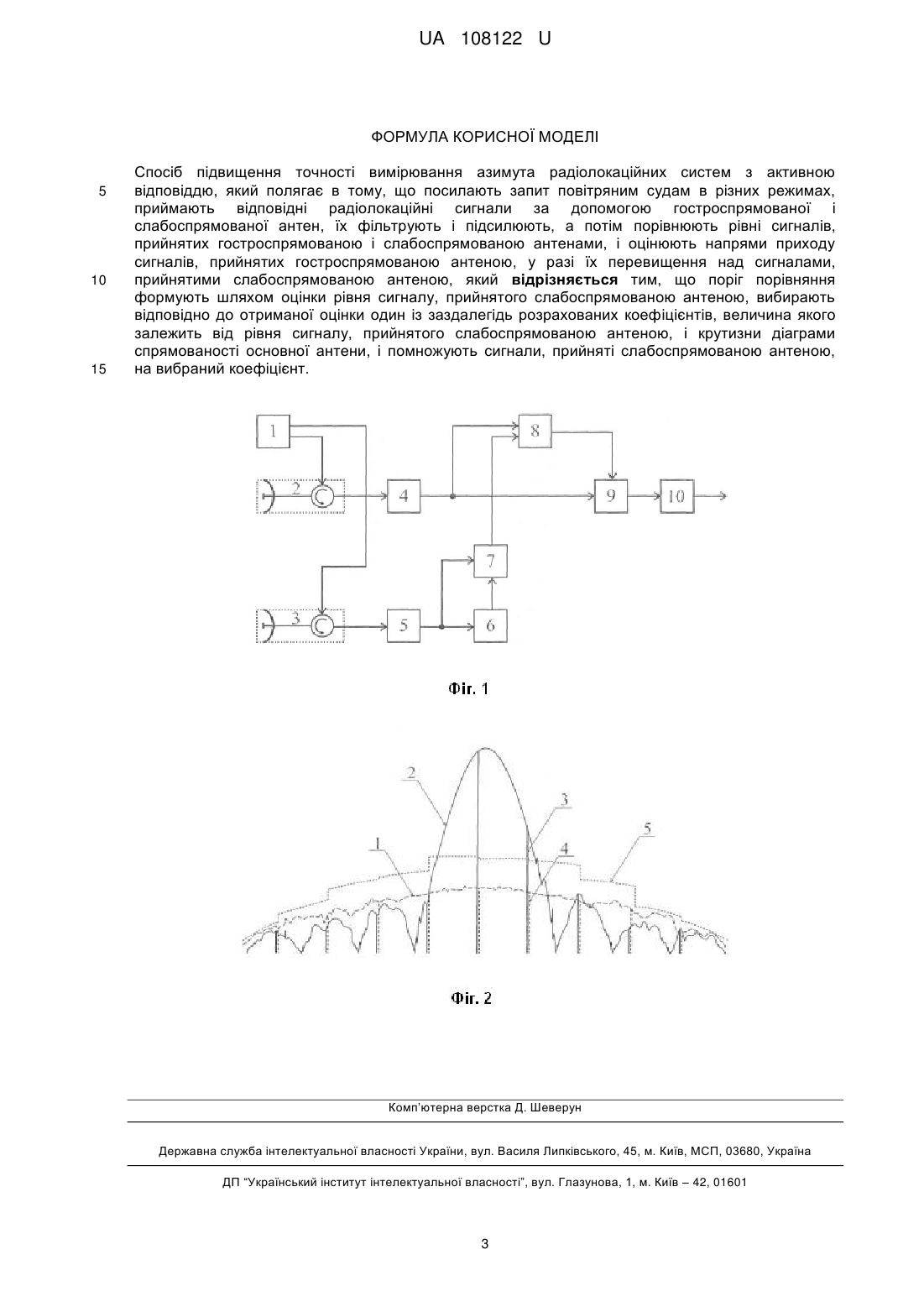
Реферат: Спосіб підвищення точності вимірювання азимута радіолокаційних систем з активною відповіддю включає посилання запиту повітряним судам в різних режимах. Приймають відповідні радіолокаційні сигнали за допомогою гостроспрямованої і слабоспрямованої антен, їх фільтрують і підсилюють. Потім порівнюють рівні сигналів, прийнятих гостроспрямованою і слабоспрямованою антенами, і оцінюють напрями приходу сигналів, прийнятих гостроспрямованою антеною, у разі їх перевищення над сигналами, прийнятими слабоспрямованою антеною. Поріг порівняння формують шляхом оцінки рівня сигналу, прийнятого слабоспрямованою антеною. Вибирають відповідно до отриманої оцінки один із заздалегідь розрахованих коефіцієнтів, величина якого залежить від рівня сигналу, прийнятого слабоспрямованою антеною, і крутизни діаграми спрямованості основної антени, і помножують сигнали, прийняті слабоспрямованою антеною, на вибраний коефіцієнт. UA 108122 U (12) UA 108122 U UA 108122 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області радіолокації і використовується, зокрема, в системах державного розпізнавання та в системах вторинної локації. Відомий спосіб заглушення пасивних завад (Радиотехнические средства управления воздушным движением. Μ., "Транспорт", 1975 г. - С. 268-269). Відповідно до відомого способу здійснюють запит літальних апаратів, обладнаних радіолокаційними відповідачами, в різних режимах, приймають у відповідь радіолокаційні сигнали за допомогою гостроспрямованої антени, їх фільтрують, підсилюють і порівнюють із заданим пороговим рівнем. "Результат порівняння з порогом піддають критерійній обробці для визначення азимута початку та кінця пачки. Азимут цілі визначають як середнє значення між початком та кінцем пачки. Недоліком аналога є те, що виявлення початку та кінця пачки відбувається на краях діаграми спрямованості (ДС) антени при малих рівнях вхідного сигналу, при цьому, навіть у випадку, якщо сигнал по центру ДС має значний рівень, виникають великі помилки визначення азимута. Відомий також моноімпульсний спосіб визначення азимута (Стивенз Майкл К. Вторичная обзорная радиолокация. Киев. УкрНИИНТИ, 1990 г. стр. 151-156), який полягає в тому, що здійснюють запит літальних апаратів, обладнаних радіолокаційними відповідачами, в різних режимах, приймають у відповідь радіолокаційні сигнали за допомогою гостроспрямованої сумарної і гостроспрямованої різницевої антен, їх фільтрують, підсилюють і порівнюють із заданим пороговим рівнем. Потім для сигналів, що перевищили пороговий рівень, здійснюють вимірювання азимута моноімпульсним методом. Недоліками відомого способу є велика складність та висока вартість апаратури. Найближчим аналогом є спосіб визначення азимута цілі (РЛС 36Д6М. Навчальний посібник. Запоріжжя, 2006 р., - С. 88-90). Відповідно до цього способу здійснюють прийом відбитих радіолокаційних сигналів за допомогою гостроспрямованої та слабоспрямованої антен, їх фільтрують, підсилюють, і порівнюють сигнали, прийняті гостроспрямованою антеною, із заданим пороговим рівнем та з сигналами, прийнятими слабоспрямованою антеною. Потім, по сигналах, що перевищили пороговий рівень і рівень сигналів, прийнятих слабоспрямованою антеною, здійснюють обчислення максимуму огинаючої діаграми спрямованості гостроспрямованої антени. Значення азимута, відповідне максимуму обвідної, є значенням азимута цілі. Використовуваний в даному способі принцип визначення азимута цілі дозволяє отримати точність, близьку до точності моноімпульсного методу, і не вимагає використання дорогої та складної апаратури для його реалізації. Недоліком найближчого аналога є те, що він забезпечує високу точність визначення азимута тільки у разі прийому великої кількості сигналів від цілі, необхідних для отримання форми огинаючої діаграми спрямованості антени, близької до реальної. У разі радіолокаційних систем з активною відповіддю, ця умова виконується не завжди. Більшість вторинних радіолокаторів і радіолокаційних запитувачів, за час знаходження цілі в межах діаграми спрямованості, запитують літальні апарати в різних режимах, кількість яких може досягати чотирьох. При цьому бортові відповідачі можуть відповідати не у всіх режимах, а іноді тільки в одному. В основу корисної моделі поставлено задачу поліпшення точності вимірювання азимута літальних апаратів, обладнаних радіолокаційними відповідачами. Поставлена задача вирішується тим, що спосіб підвищення точності вимірювання азимута радіолокаційних систем з активною відповіддю полягає в тому, що посилають запити повітряним судам в різних режимах, приймають відповідні радіолокаційні сигнали за допомогою гостроспрямованої і слабоспрямованої антен, фільтрують і підсилюють, а потім порівнюють рівні сигналів, прийнятих гостроспрямованою і слабоспрямованою антенами, і оцінюють напрями приходу сигналів, прийнятих гостроспрямованою антеною, у разі їх перевищення над сигналами, прийнятими слабоспрямованою антеною, згідно з корисною моделлю, поріг порівняння формують шляхом оцінки рівня сигналу, прийнятого слабоспрямованою антеною, вибирають відповідно до отриманої оцінки один із заздалегідь розрахованих коефіцієнтів, величина якого залежить від рівня сигналу, прийнятого слабо спрямованою антеною, і крутизни діаграми спрямованості основної антени, і помножують сигнали, прийняті слабоспрямованою антеною, на вибраний коефіцієнт. Завдяки тому, що поріг порівняння формують шляхом оцінки рівня сигналу, прийнятого слабоспрямованою антеною, вибирають відповідно до отриманої оцінки один із заздалегідь розрахованих коефіцієнтів, величина якого залежить від рівня сигналу, прийнятого слабоспрямованою антеною, і крутизни діаграми спрямованості основної антени, і помножують сигнали, прийняті слабоспрямованою антеною, на вибраний коефіцієнт, поліпшується точність вимірювання азимута літальних апаратів, обладнаних радіолокаційними відповідачами. 1 UA 108122 U 5 10 15 20 25 30 35 40 45 50 55 На фіг. 1 наведена структурна схема пристрою, що реалізує пропонований спосіб. На фіг. 2 наведені діаграми спрямованості слабоспрямованої антени (1), гостроспрямованої антени (2), сигнали, прийняті гостроспрямованою антеною (3), слабоспрямованою антеною (4), і поріг порівняння (5). Пристрій, який реалізує спосіб, що заявляється, містить багатоканальну передавальну систему 1, виходи якої підключені до входів гостроспрямованої антени 2 і слабоспрямованої антени 3, основний приймач 4 і додатковий приймач 5 підключені до виходів гостроспрямованої антени 2 і слабоспрямованої антени 3 відповідно, блок оцінки рівня сигналу 6, прийнятого слабоспрямованою антеною 3, вхід якого з'єднаний з виходом додаткового приймача 5, а вихід з першим входом помножувача 7 Другий вхід помножувача 7 з'єднаний з виходом додаткового приймача 5. Вихід помножувача 7 з'єднаний з першим входом схеми порівняння 8, другий вхід якої підключений до виходу основного приймача 4, а її вихід з'єднаний з керуючим входом ключа 9, вхід якого підключений до виходу основного приймача 4, а його вихід з'єднаний з входом блока обчислення азимута 10, вихід якого є виходом пристрою. Суть способу полягає в такому. За допомогою багатоканальної передавальної системи 1 запитують літальні апарати в різних режимах запиту. Залежно від типів бортових відповідачів і їх настройки повітряні судна відповідають в одному або в декількох режимах. Відповідні сигнали повітряних суден приймають за допомогою гостроспрямованої антени 2 і слабоспрямованої антени 3. Прийняті сигнали фільтрують по частоті і підсилюють до необхідного рівня за допомогою основного приймача 4 і додаткового приймача 5. За допомогою блока оцінки рівня сигналу 6 оцінюють рівень сигналу, прийнятого слабоспрямованою антеною 3, і вибирають, відповідно до отриманої оцінки, один із заздалегідь розрахованих коефіцієнтів, величина якого залежить від рівня сигналу, прийнятого слабоспрямованою антеною 3, і крутизни діаграми спрямованості гостроспрямованої антени 2. Помножують сигнал з виходу додаткового приймача 5 на вибраний коефіцієнт за допомогою помножувача 7 і порівнюють його з вихідним сигналом основного приймача 4 за допомогою схеми порівняння 8. Залежно від результату порівняння за допомогою ключа 9 пропускають або не пропускають сигнал з виходу основного приймача 4 на вхід блока обчислення азимута 10. За допомогою блока обчислення азимута 10 розраховують азимут центра пачки сигналів, що пройшли через ключ 9. Спосіб, що заявляється, забезпечує оцінку рівня сигналу, прийнятого слабоспрямованою антеною 3. Завдяки малій спрямованості слабоспрямованої антени 3 рівень сигналу, що приймається нею, мало змінюється в межах головної пелюстки діаграми спрямованості гостроспрямованої антени 2 (див. фіг. 2). В той же час, рівень відповідних сигналів, що приймаються гостроспрямованою антеною 2, значно змінюється в межах головної пелюстки. При малій кількості відповідних сигналів, що припадають на ширину діаграми спрямованості гостроспрямованої антени 2, знижується точність обчислення максимуму обвідної, і посилюється негативний вплив спотворених шумами відповідних сигналів, прийнятих на краях основної пелюстки діаграми спрямованості. Крім того, при малій кількості відповідних сигналів, на точність визначення азимута впливають і сигнали, прийняті по бічних пелюстках гостроспрямованої антени 2 у разі перевищення їх над сигналами, прийнятими слабоспрямованою антеною 3, у випадку інтерференційних спотворень діаграм спрямованості. Оцінку рівня сигналу, прийнятого слабоспрямованою антеною 3, використовують для вибору одного із заздалегідь розрахованих коефіцієнтів, величина якого залежить від рівня сигналу, прийнятого слабоспрямованою антеною 3, і крутизни діаграми спрямованості гостроспрямованої антени 2. Потім формують поріг порівняння шляхом множення сигналів, прийнятих слабоспрямованою антеною 3, на вибраний коефіцієнт. Сигнал, прийнятий гостроспрямованою антеною 2, порівнюють з сформованим порогом, а результат порівняння подають на керуючий вхід ключа 9. За допомогою ключа 9 пропускають на вхід блока обчислення азимута 10 тільки сигнали, що перевищують сформований поріг. Далі обчислюють центр пачки сигналів, що перевищили поріг. Оскільки поріг порівняння формують таким чином, що при великих і середніх сигналах на вхід блока обчислення азимута 10 надходять тільки сигнали в межах неспотвореної шумами частини головної пелюстки гостроспрямованої антени 2, точність визначення азимута при малій кількості відповідних сигналів істотно збільшується. Таким чином, спосіб, що заявляється, дозволяє підвищити точність оцінки напряму приходу відповідних сигналів середньої і великої потужності і, за рахунок цього, підвищити точність вимірювання азимута в більшій частині зони дії систем державного розпізнавання і систем вторинної локації. 2 UA 108122 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Спосіб підвищення точності вимірювання азимута радіолокаційних систем з активною відповіддю, який полягає в тому, що посилають запит повітряним судам в різних режимах, приймають відповідні радіолокаційні сигнали за допомогою гостроспрямованої і слабоспрямованої антен, їх фільтрують і підсилюють, а потім порівнюють рівні сигналів, прийнятих гостроспрямованою і слабоспрямованою антенами, і оцінюють напрями приходу сигналів, прийнятих гостроспрямованою антеною, у разі їх перевищення над сигналами, прийнятими слабоспрямованою антеною, який відрізняється тим, що поріг порівняння формують шляхом оцінки рівня сигналу, прийнятого слабоспрямованою антеною, вибирають відповідно до отриманої оцінки один із заздалегідь розрахованих коефіцієнтів, величина якого залежить від рівня сигналу, прийнятого слабоспрямованою антеною, і крутизни діаграми спрямованості основної антени, і помножують сигнали, прийняті слабоспрямованою антеною, на вибраний коефіцієнт. Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 7/36, H04B 15/00
Мітки: підвищення, точності, активною, спосіб, вимірювання, систем, відповіддю, азимута, радіолокаційних
Код посилання
<a href="https://ua.patents.su/5-108122-sposib-pidvishhennya-tochnosti-vimiryuvannya-azimuta-radiolokacijjnikh-sistem-z-aktivnoyu-vidpoviddyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб підвищення точності вимірювання азимута радіолокаційних систем з активною відповіддю</a>
Спосіб підвищення точності виявлення сигналів у радіолокаційних системах зі складними зондувальними сигналами
Номер патенту: 108898
Опубліковано: 25.06.2015
Автори: Конахович Георгій Филимонович, Голубничий Олексій Георгійович
МПК: G01S 7/36
Мітки: складними, точності, системах, радіолокаційних, сигналів, підвищення, виявлення, сигналами, спосіб, зондувальними
Формула / Реферат:
Спосіб підвищення точності виявлення сигналів у радіолокаційних системах зі складними зондувальними сигналами, який полягає в тому, що в процесі оброблення відбитого зондувального сигналу одночасно зменшують рівень бічних пелюсток та ширину основної пелюстки автокореляційної функції, що дозволяє підвищити відповідно якість розпізнавання при дії завад та роздільну здатність по дальності, який відрізняється тим, що у передавальному пристрої...
Спосіб формування когерентного відповідного сигналу в когерентно-імпульсній рлс з активною відповіддю
Номер патенту: 46627
Опубліковано: 15.05.2002
Автори: Баранов Андрій Володимирович, Каплієнко Володимир Сергійович
МПК: G01S 13/74
Мітки: відповіддю, рлс, спосіб, когерентного, когерентно-імпульсній, сигналу, відповідного, формування, активною
Формула / Реферат:
Спосіб формування когерентного відповідного сигналу у когерентно-імпульсній радіолокаційній станції з активною відповіддю, який полягає в тому, що прийнятий радіолокаційною станцією сигнал перетворюють на проміжну частоту, фільтрують, формують відповідний сигнал на проміжній частоті, підсилюють його і перетворюють на частоту прийнятого сигналу і випромінюють, який відрізняється тим, що переносять частоту сигналу радіолокаційної станції на...
Спосіб підвищення точності вимірювання лінійного зношування
Номер патенту: 29595
Опубліковано: 25.01.2008
Автори: Маковкін Олег Миколайович, Підченко Сергій Константинович, Лаба Олександр Андрійович, Таранчук Алла Анатоліївна, Гладкий Ярослав Миколайович
МПК: G01B 21/06
Мітки: лінійного, спосіб, вимірювання, зношування, точності, підвищення
Формула / Реферат:
Спосіб підвищення точності вимірювання лінійного зношування, який включає монтаж зразка, запуск процесу тертя з наступним вимірюванням величини зношування, який відрізняється тим, що відсутня операція зупинки тертя та зняття зразка для вимірювання проміжних значень величини зношування внаслідок використання зразка із напівсферичною формою, встановлення ємкісного датчика, блока аналогової обробки, блока цифрової обробки та керування, а також...
Спосіб збільшення дальності дії і збільшення точності вимірювання відстані системи радіочастотної ідентифікації і позиціонування
Номер патенту: 109370
Опубліковано: 10.08.2015
Автор: Широков Ігор Борисович
МПК: G01R 29/08, G01S 13/00, G01S 13/32
Мітки: дальності, збільшення, спосіб, відстані, дії, точності, радіочастотної, вимірювання, системі, позиціонування, ідентифікації
Формула / Реферат:
Спосіб збільшення дальності дії і збільшення точності вимірювання відстані системи радіочастотної ідентифікації і позиціонування, який включає генерування безперервних високочастотних коливань з відомими частотами, первинне випромінювання, первинний прийом, зсув частоти, підсилення сигналу в транспондері, вторинне випромінювання, вторинний прийом високочастотних коливань, перемножування в змішувачі повторно прийнятих високочастотних...
Спосіб відхилення головного максимуму діаграми спрямованості рупорних випромінювачів антенних систем наземного автоматизованого комплексу управління космічними апаратами
Номер патенту: 44896
Опубліковано: 26.10.2009
Автори: Ломоносов Сергій Євгенійович, Залужний Руслан Миколайович, Рачинський Костянтин Олександрович, Пашков Дмитро Павлович
МПК: H04B 7/00
Мітки: систем, апаратами, управління, комплексу, наземного, максимуму, рупорних, космічними, діаграми, спосіб, антенних, відхілення, випромінювачів, головного, спрямованості, автоматизованого
Формула / Реферат:
Спосіб відхилення головного максимуму діаграми спрямованості рупорних випромінювачів антенних систем наземного автоматизованого комплексу управління космічними апаратами, який полягає в застосуванні додаткового антенного пристрою - концентричних фрагментів зон Френеля, який в сукупності з антеною формує поле (відповідний амплітудний та фазовий розподіл) в розхилі рупора таким чином, що головний максимум діаграми спрямованості в дальній зоні...
Попередній патент: Трубчастий електронагрівник
Наступний патент: Автоматизований модуль водопідготовки
Випадковий патент: Спосіб одержання термоелектричного матеріалу на основі монокристалів тетратіостанату талію(і) tl4sns4