Планетарно-важільний механізм пілігримового руху
Номер патенту: 108164
Опубліковано: 11.07.2016
Автори: Амбарцумянц Роберт Вачаганович, Тутаєв Сергій Валерійович





Формула / Реферат
Планетарно-важільний механізм пілігримового руху, який містить корпус, ведучий вал, нерухоме зубчасте колесо, сателіти, водило, вали, кривошипи, шатуни, вихідну ланку, ведений вал, який відрізняється тим, що механізм додатково містить рухоме зовнішнє колесо, при цьому на ведучому валу рухомо установлено водило, а нерухомо - центральне зовнішнє зубчасте колесо, яке зачеплено з сателітами, рухомо установленими на водилі, сателіти, в свою чергу, зачеплені з внутрішнім зубчастим колесом, установленим у корпусі нерухомо і співвісно з ведучим валом.
Текст
Реферат: UA 108164 U UA 108164 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування, а саме до механізмів для відтворення різноманітних законів руху робочого органу, які можуть бути використані в шнекових пресах, змішувачах сипких та рідких матеріалів, машинах-автоматах і напівавтоматах, роботах та маніпуляторах. Відомі конструкції планетарно-важільного механізму (див. Артоболевский И.И. Механизмы в современной технике, Справочное пособие в 7 томах, т. IV: Зубчатые механизмы. - 2-е изд., переработанное. -М.: "Наука". Главная редакция физико-математической литературы, 1980. 592 с., стор. 127, механізм № 2290), призначені для здійснення малих реверсивних рухів вихідної ланки. Основними недоліками механізму є: вузькі функціональні можливості, а саме малий зворотний хід; наявність вищої кінематичної пари, що зумовлює інтенсивний знос поверхонь, що труться і, отже, зменшення надійності і довговічності роботи. Найближчим до заявленого є технічне рішення (див. патент України на винахід № 80286, Бюл. № 14, 2007 р.) призначене для відтворення пілігримового руху вихідної ланки. Механізм складається з корпусу, до якого гвинтами приєднано нерухоме центральне зовнішнє зубчасте колесо. Співвісно з центральним зовнішнім зубчастим колесом установлений рухомо ведучий вал з жорстко закріпленим з ним водилом. На водилі рухомо установлені вали, на яких жорстко установлені сателіти зачеплені з центральним зовнішнім зубчастим колесом, і кривошипи. Із кривошипами рухомо сполучені шатуни, які в свою чергу рухомо з'єднані з вихідною ланкою. Механізм працює таким чином - при обертанні ведучого вала з водилом сателіти обкочуються по центральному нерухомому зубчастому колесу, при цьому обертаються і кривошипи, які закріплені на осях сателітів. Кривошипи мають довжину більшу за радіус ділильного кола сателітів, що зумовлює переміщення осі шарніра, яким з'єднані кривошипи і шатуни, по траєкторії, яка має вигляд подовженої епіциклоїди. Від кривошипів через шатуни рух передається веденій ланці. Істотними недоліками прототипу є те, що для зменшення швидкості вихідної ланки потрібно між джерелом руху та ведучим валом механізму додатково установити редуктор. Це призводить до: - збільшення габаритних розмірів механізму в цілому; - збільшення робочої зони; - збільшення металомісткості та собівартості виготовлення механізму. В основу корисної моделі поставлено задачу створити удосконалений планетарноважільний механізм пілігримового руху, який дозволяє отримати потрібні робочі швидкості вихідної ланки без додаткового передаточного механізму. Поставлена задача вирішена у конструкції планетарно-важільного механізму пілігримового руху, який містить корпус, ведучий вал, нерухоме зубчасте колесо, сателіти, водило, вали, кривошипи, шатуни, вихідну ланку, ведений вал, тим, що механізм додатково містить рухоме зовнішнє колесо, при цьому на ведучому валу рухомо установлено водило, а нерухомо центральне зовнішнє зубчасте колесо, яке зачеплено з сателітами, рухомо установленими на водилі, сателіти, в свою чергу, зачеплені з внутрішнім зубчастим колесом, установленим у корпусі нерухомо і співвісно з ведучим валом. Конструкція планетарно-важільного механізму пілігримового руху зображена на кресленні, де: фіг. 1 - вигляд механізму в перерізі Б-Б за фіг. 2; фіг. 2 - вигляд А за фіг. 1 при умовно знятій кришці. Механізм складається з корпусу 1. В корпус 1 установлений за допомогою підшипників ведучий вал 2. На ведучий вал 2 за допомогою шпонки 3 нерухомо установлено центральне зовнішнє зубчасте колесо 4, яке зачеплене з сателітами 5 і 6. Сателіти 5, 6 за допомогою шпонок 7, 8 нерухомо установлені на валах 9, 10, відповідно, і зачеплені з внутрішнім зубчастим колесом 11, нерухомо установленому в корпусі 1 співвісно з ведучим валом 2. Вали 9 і 10 рухомо установлені у водилі 12, яке, в свою чергу, рухомо і співвісно установлено на ведучому валу 2. На валах 9 і 10 за допомогою шпонок 13, 14 нерухомо установлені кривошипи 15 та 16, відповідно, таким чином, що їх повздовжні осі паралельні. Кривошипи 15, 16 за допомогою циліндричних пальців 17, 18 рухомо з'єднані з шатунами 19, 20, відповідно. Шатуни 19, 20 за допомогою циліндричних пальців 21, 22 рухомо з'єднані з вихідною ланкою 23. Вихідна ланка 23 за допомогою шпонки 24 жорстко закріплена на веденому валу 25, який за допомогою підшипників рухомо установлений у кришці 26 корпусу 1. Кришка 26 установлена в корпусі 1 співвісно з ведучим валом 2 за допомогою гвинтів. Планетарно-важільний механізм пілігримового руху працює наступним чином. Рух від зовнішнього джерела передається ведучому валу 2 і через шпонку 3 центральному 1 UA 108164 U 5 10 зовнішньому зубчастому колесу 4. Рух від центрального зовнішнього зубчастого колеса 4 передається сателітам 5 і 6, які обкочуються навколо нерухомого внутрішнього зубчастого колеса 11 і передають рух до водила 12. Кутова швидкість водила 12 значно менша кутової швидкості ведучого вала 2 (різниця може досягати 10 разів і зумовлена кількістю зубів зубчастих коліс 4 та 11). Сумісно з сателітами 5, 6 обертаються валики 9, 10 і установлені на них кривошипи 15 і 16. Від кривошипів 15, 16 рух передається шатунам 19, 20. Шатуни 19, 20 передають рух вихідній ланці 23 і від неї веденому валу 25. Таке конструктивне виконання дозволяє без додаткових передаточних механізмів отримати потрібні робочі швидкості вихідної ланки механізму шляхом вибору кількості зубів центрального та сонячного зубчастих коліс. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 Планетарно-важільний механізм пілігримового руху, який містить корпус, ведучий вал, нерухоме зубчасте колесо, сателіти, водило, вали, кривошипи, шатуни, вихідну ланку, ведений вал, який відрізняється тим, що механізм додатково містить рухоме зовнішнє колесо, при цьому на ведучому валу рухомо установлено водило, а нерухомо - центральне зовнішнє зубчасте колесо, яке зачеплено з сателітами, рухомо установленими на водилі, сателіти, в свою чергу, зачеплені з внутрішнім зубчастим колесом, установленим у корпусі нерухомо і співвісно з ведучим валом. 2 UA 108164 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 29/00
Мітки: пілігримового, планетарно-важільний, руху, механізм
Код посилання
<a href="https://ua.patents.su/5-108164-planetarno-vazhilnijj-mekhanizm-piligrimovogo-rukhu.html" target="_blank" rel="follow" title="База патентів України">Планетарно-важільний механізм пілігримового руху</a>
Регульований зубчасто-важільний механізм

Номер патенту: 31037
Опубліковано: 25.03.2008
Автори: Амбарцумянц Роберт Вачаганович, Тутаєв Сергій Валерійович
МПК: F16H 29/00
Мітки: регульованій, механізм, зубчасто-важільний
Формула / Реферат:
Регульований зубчасто-важільний механізм, що містить ведучий та ведений вали, сателіти, центральне колесо, водило, шатуни, кривошипи, вихідну ланку, який відрізняється тим, що вихідна ланка складається з циліндричних стрижнів і фланця, що має циліндричні пази і співвісний з ведучим валом отвір, у якому встановлений шток, на одному кінці якого рухомо встановлена втулка, до якої одним кінцем шарнірно кріпляться важелі однакової довжини, інший...
Зубчато-важільний механізм коливального руху
Номер патенту: 32109
Опубліковано: 12.05.2008
Автори: Амбарцумянц Роберт Вачаганович, Тутаєв Сергій Валерійович
МПК: F16H 29/00
Мітки: механізм, руху, зубчато-важільний, коливального
Формула / Реферат:
Зубчато-важільний механізм коливального руху, що містить кривошипи, шатуни, вихідну ланку, який відрізняється тим, що кривошипами є зубчаті колеса, діаметрально протилежно зачеплені з ведучим кривошипом, виконаним у вигляді вала-шестірні, шатунами однакової довжини, одним кінцем діаметрально протилежно рухомо з'єднаними із зубчатими колесами, а іншим кінцем діаметрально протилежно рухомо з'єднаними з веденою ланкою, яка встановлена співвісно...
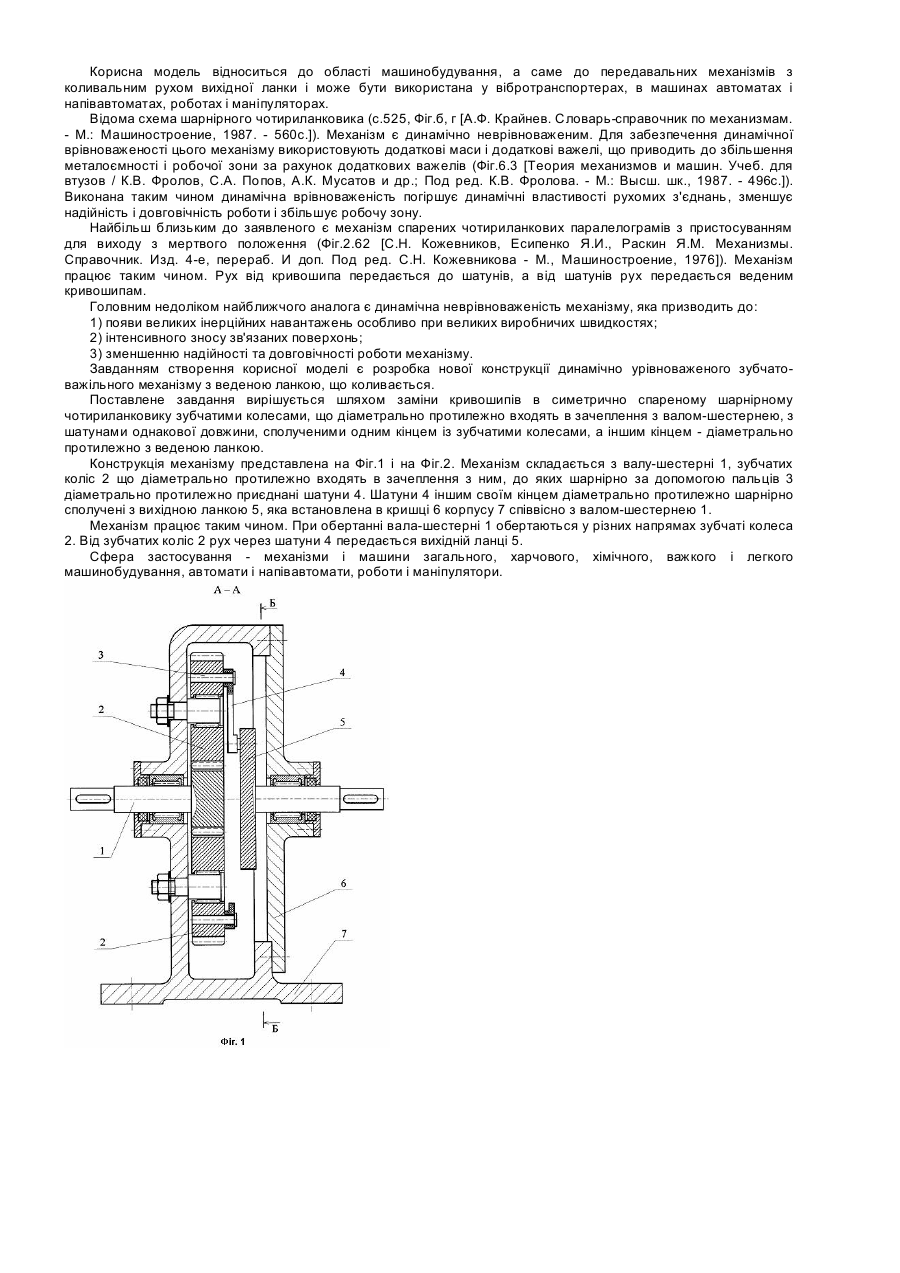
Динамічно зрівноважений зубчато-важільний механізм
Номер патенту: 26506
Опубліковано: 25.09.2007
Автори: Амбарцумянц Роберт Вачаганович, Тутаєв Сергій Валерійович
МПК: F16H 29/00
Мітки: зубчато-важільний, механізм, динамічної, зрівноважений
Формула / Реферат:
Динамічно зрівноважений зубчато-важільний механізм, який містить нерухоме центральне колесо, сателіти, водило, важелі, що з'єднують сателіти з вихідною ланкою, який відрізняється тим, що ведена ланка з'єднана рухомо з двома і більше важелями, з'єднаними рухомо з кривошипами, жорстко закріпленими з сателітами, і число важелів, з'єднуючих сателіт із вихідною ланкою, строго дорівнює числу сателітів.
Зубчато-важільний механізм коливального руху
Номер патенту: 47741
Опубліковано: 25.02.2010
Автори: Амбарцумянц Роберт Вачаганович, Тутаєв Сергій Валерійович
МПК: F16H 29/00
Мітки: руху, коливального, механізм, зубчато-важільний
Формула / Реферат:
Зубчато-важільний механізм коливального руху, який складається з корпусу, кришки, ведучого вала-шестірні, двох зубчастих коліс, шатунів, вихідної ланки, веденого вала, який відрізняється тим, що один з шатунів виконаний збірним у вигляді циліндра, усередині якого по подовжній осі нерухомо встановлений шток, що утворює рухоме з'єднання з поршнем, встановленим усередині циліндра, поршень з іншого боку нерухомо закріплений на другому штоку, на...
Зубчасто-важільний диференційний механізм
Номер патенту: 14352
Опубліковано: 15.05.2006
Автори: Смутко Світлана Валеріївна, Мельник Василь Іванович, Неймак Віталій Станіславович, Параска Георгій Борисович
МПК: F16H 37/00, F16H 1/28
Мітки: механізм, зубчасто-важільний, диференційний
Формула / Реферат:
Зубчасто-важільний диференційний механізм, який містить центральне зубчасте колесо, водило, два жорстко з'єднаних сателіти, встановлених на водилі, зубчасте колесо з віссю обертання, розташованою в водилі, важіль, з'єднаний з зубчастим колесом, який відрізняється тим, що центральне зубчасте колесо виконане з можливістю обертання.
Попередній патент: Установка для оперативного проведення аналізу нафтовитісної здатності розчинів поверхнево-активних речовин
Наступний патент: Композиція інгредієнтів для приготування соусу молочного “мушкетер”
Випадковий патент: Прицільна планка удовіченка