Спосіб контролю місцезнаходження рухомого складу на стрілочній колійній ділянці залізничої станції
Номер патенту: 110319
Опубліковано: 10.10.2016
Автори: Лаврухін Олександр Валерійович, Котенко Анатолій Миколайович, Козодой Дмитро Сергійович, Дунаєвський Леонід Маркович, Каграманян Артур Олександрович, Змій Сергій Олексійович
Формула / Реферат
1. Спосіб контролю місцезнаходження рухомого складу на стрілочній колійній ділянці залізничної станції, при якому системою електричної централізації отримують у реальному часі інформацію про фактичне місцезнаходження рухомого складу у зоні граничного стовпчика на стрілочній колійній ділянці й у разі небезпечного його перебування для руху поїзду, блокують на світлофорах рух, який відрізняється тим, що встановлюють точкові колійні датчики, які розміщують на відстані не менше 3,5 м від граничного стовпчика у кожному напрямку руху по стрілочному переводу, а після отримання інформації про кількість осей, що зафіксовані кожним датчиком, інформацію направляють до системи електричної централізації, при цьому на основі отриманої інформації за допомогою підсистеми забезпечення безпеки визначають вільність/зайнятість колійних ділянок та пристроєм спряження з об'єктами залізничної інформації включають на світлофорах відповідне показання.
2. Спосіб за п. 1, який відрізняється тим, що у разі фактичної відсутності рухомого складу у зоні граничного стовпчика, виконують переміщення поїздів по протилежному положенню стрілочного переводу.
Текст
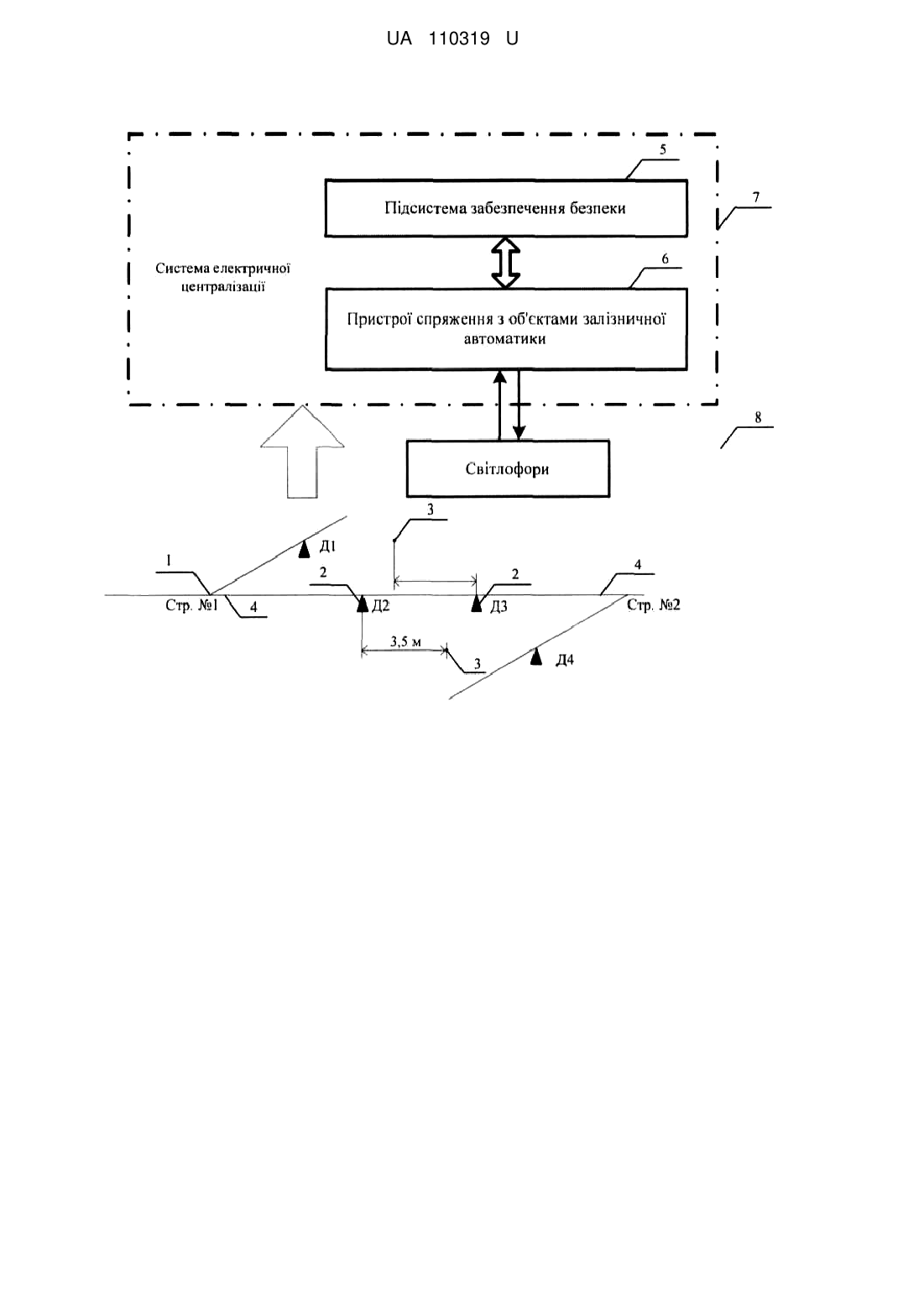
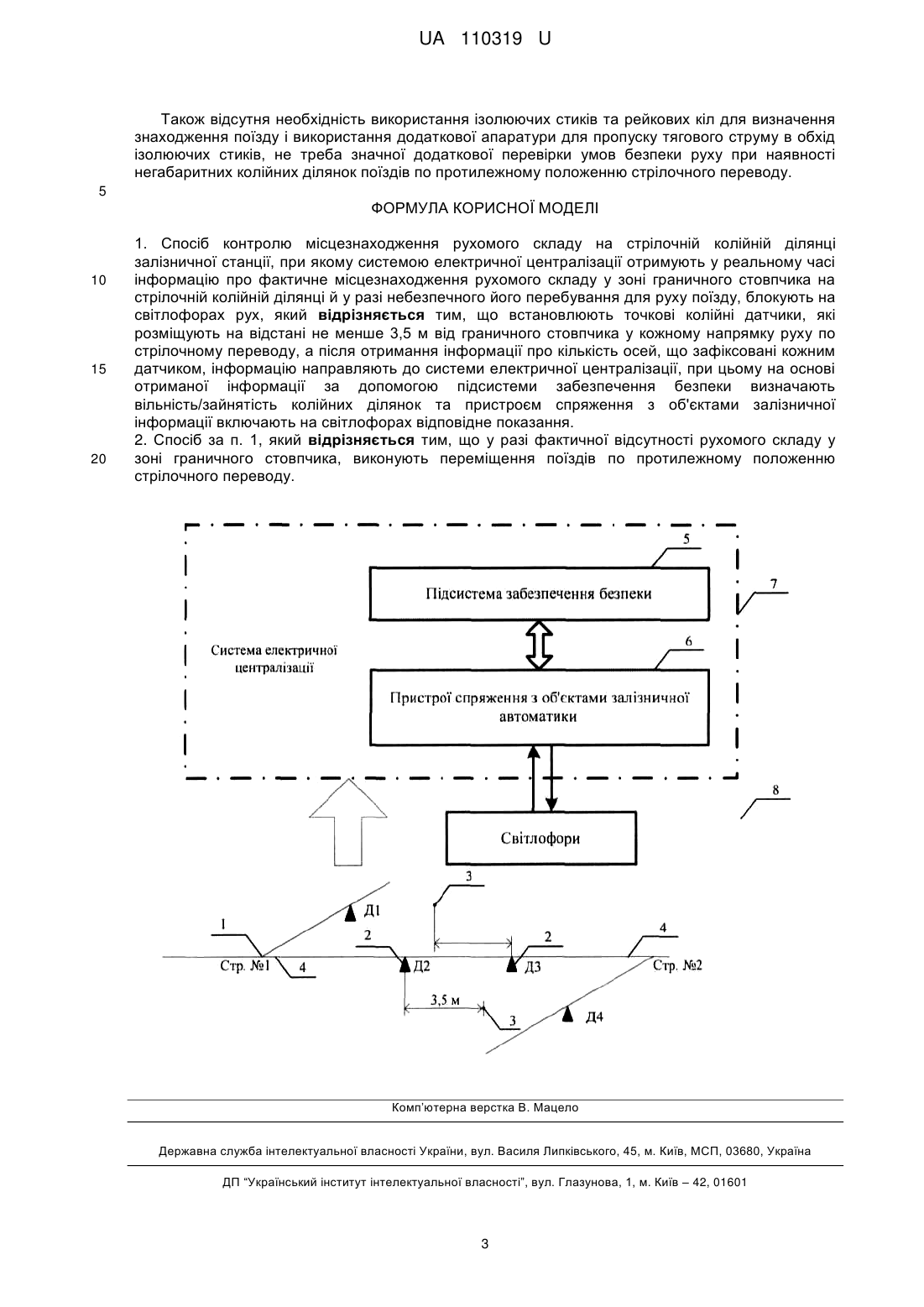
Реферат: Спосіб контролю місцезнаходження рухомого складу на стрілочній колійній ділянці залізничної станції, при якому системою електричної централізації отримують у реальному часі інформацію про фактичне місцезнаходження рухомого складу у зоні граничного стовпчика на стрілочній колійній ділянці й у разі небезпечного його перебування для руху поїзду, блокують на світлофорах рух, причому встановлюють точкові колійні датчики, які розміщують на відстані не менше 3,5 м від граничного стовпчика у кожному напрямку руху по стрілочному переводу, а після отримання інформації про кількість осей, що зафіксовані кожним датчиком, інформацію направляють до системи електричної централізації, при цьому на основі отриманої інформації за допомогою підсистеми забезпечення безпеки визначають вільність/зайнятість колійних ділянок та пристроєм спряження з об'єктами залізничної інформації включають на світлофорах відповідне показання. UA 110319 U (12) UA 110319 U UA 110319 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить залізничного транспорту, а більш конкретно до способу контролю місцезнаходження рухомого складу, що знаходиться на стрілочній колійній ділянці залізничної станції. Відома корисна модель, яка належить до автоматики і призначена для використання в багатофункціональному комплексі технічних засобів для діагностики рухомого складу. Пристрій містить підлогове устаткування, що включає основні і допоміжні підлогові камери, пристрій контролю габариту рухомого складу, електронну педаль, датчики рахунку осей, тріангуляційний лазерний датчик. Тріангуляційний лазерний датчик встановлений з можливістю розпізнавання рельєфу поверхні буксового вузла і розташований в корпусі основний підлогової камери і центрований з оптичною віссю болометри. Технічним результатом корисної моделі є розширення функціональних можливостей. [див. наприклад патент РФ № 2373093 МПК В61L 1/16]. Але це технічне рішення не забезпечує надійність контролю місцезнаходження рухомого складу. Відомий також спосіб контролю місцезнаходження рухомого складу, що знаходиться на стрілочній колійній ділянці залізничної станції [див. Сапожников, В.В. Эксплуатационные основы автоматики и телемеханики / Вл.В. Сапожников, И.М. Кокурин, В.А. Кононов, А.А. Лыков, А.Б. Никитин; под ред. проф. Вл.В. Сапожникова. - М.: Маршрут, 2006. - 247 с.]. За цим способом колійний розвиток залізничної станції розподіляється на колійні ділянки за допомогою ізолюючих стиків Кожна колійна ділянка обладнується рейковим колом, що контролює наявність рухомого складу (PC) без можливості визначення його фактичного місцезнаходження. Розподіл на колійні ділянки та розміщення ізолюючих стиків виконується з метою забезпечення максимальної пропускної спроможності при мінімальній довжині залізничної станції. Граничний стовпчик встановлюється в середині міжколійного простору там, де відстань між осями колій дорівнює 4100 мм та вказує місце, далі якого на колії не можна встановлювати (не може слідувати) рухомий склад, що рухається в напрямку стрілочного переводу або глухого перетину. Таким чином, для контролю фактичного проїзду рухомим складом граничного стовпчика необхідно ізолюючі стики встановлювати на відстані не менше 3,5 м від нього. Якщо відстань від граничного стовпчика менше вказаного значення, то ізолюючий стик вважається негабаритним У цьому разі при знаходженні рухомого складу на колійній ділянці зі стрілочним переводом № 2 можливе його перебування за межами граничного стовпчика стрілочного переводу № 1. При цьому рух по відхиленню через стрілочний перевід № 1 є небезпечним через можливість зіткнення з рухомим складом, що знаходиться на колійній ділянці зі стрілкою № 2. Недоліки цього способу: - наявність великої кількості ізолюючих стиків, що є ненадійними елементами; - необхідність використання додаткової апаратури для пропуску тягового струму в обхід ізолюючих стиків; - наявність рейкових кіл для контролю знаходження рухомого складу, що є ненадійними елементами; - неможливість руху по відхиленню стрілочного переведу при зайнятості рухомим складом негабаритної ділянки, навіть при фактичному проїзді рухомим складом граничного стовпчика; - необхідність значної додаткової перевірки умов безпеки руху при наявності негабаритних ізолюючих стиків. Частково ці недоліки відсутні у системі контролю вільності ділянок колії методом рахунку осей (ЕССО), яка розроблена і виготовлюється НВЦ "Промелектроніка" [див. Устройства контроля состояния участков пути всистемах железнодорожной автоматики и телемеханики: учеб. пособие / А.Г. Прохоренко, А.Г. Кириленко. - Хабаровск: Изд-во ДВГУПС, 2015. - 79 с.: ил.; Технические решения 410501-ТР. Комбинированное применение ЭССО на станционных участках пути и стрелочных секциях. РЖД, 2005. - 10 с.]. ЕССО є мікропроцесорною системою, що забезпечує автоматичний контроль вільності (зайнятості) ділянок колії. Відповідальним елементом системи ЕССО є датчик контролю проходу осей рухомого складу. До складу системи ЕССО входять напільні і постові пристрої. Напільні пристрої (рахункові пункти), призначені для підрахунку числа осей, що проїхало, складаються з реверсивних рейкових датчиків індукційного типу з комплектом кріплень на підошви рейок, напільних електронних модулів, які утворюють рахунковий пункт (РП), що розмежовує подібно ізольованому стику суміжні ділянки колії. Постові пристрої аналізують інформацію про кількість осей і приймають рішення про вільності або зайнятості ділянок колії. Інформація про кількість 1 UA 110319 U 5 10 15 20 25 30 35 40 45 50 55 осей допомогою лінії передається на центральний пункт, де обробляють інформацію, отриману від двох, трьох або чотирьох РП, і приймають рішення про стан контрольованої ділянки. Місце розташування РП аналогічне розміщенню ізолюючих стиків. Недоліки цього способу: - неможливість руху по відхиленню стрілочного переводу при зайнятості рухомим складом негабаритної ділянки, навіть при фактичному проїзді рухомим складом граничного стовпчика; - необхідність значної додаткової перевірки умов безпеки руху при наявності негабаритних колійних ділянок. Це технічне рушення вибрано як прототип. В основу корисної моделі поставлено задачу створити спосіб контролю місцезнаходження рухомого складу на стрілочній колійній ділянці залізничної станції шляхом введення нових технічних операцій і їх зв'язку до систем автоматизованого керування, який дозволить контролювати місцезнаходження рухомого складу на стрілочній колійній ділянці залізничної та дозволять виключити переміщення рухомого складу по відхиленню стрілочного переводу при фактичній наявності вагону у зоні дії граничного стовпчика, станції. Поставлена задача вирішується тим, що у відомому способі контролю місцезнаходження рухомого складу на стрілочній колійній ділянці залізничної станції, при якому системою електричної централізації отримують у реальному часі інформацію про фактичне місцезнаходження рухомого складу у зоні граничного стовпчика на стрілочній колійній ділянці й у разі небезпечного його перебування для руху поїзду блокують на світлофорах рух, для визначення вільності колійних ділянок встановлюють точкові колійні датчики, які розміщують на відстані не менше 3,5 м від граничного стовпчика у кожному напрямку руху по стрілочному переводу. Після отримання інформації про кількість осей, що зафіксовані кожним датчиком, інформацію направляють до системи електричної централізації, при цьому на основі отриманої інформації за допомогою підсистеми забезпечення безпеки визначають вільність/зайнятість колійних ділянок та пристроєм спряження з об'єктами залізничної інформації включають на світлофорах відповідне показання. У разі фактичної відсутності рухомого складу у зоні граничного стовпчика, виконують переміщення поїздів по протилежному положенню стрілочного переводу. Спосіб пояснюється кресленнями, де показана система контролю місцезнаходження рухомого складу на стрілочній колійній ділянці залізничної станції. На кресленні показані наступні позиції: 1 - стрілочний перевід; 2 - точковий колійний датчик (рахунковий пункт - РП); 3 - граничний стовпчик; 4 - колійна ділянка; 5 - підсистема забезпечення безпеки; 6 - пристрої спряження з об'єктами залізничної автоматики; 7 - система електричної централізації; 8 - світлофори. Технологія роботи наступна: для визначення вільності колійних ділянок (4) встановлюють точкові колійні датчики (2), що розміщують на відстані 3,5 м від граничного стовпчика (3) у кожному напрямку руху по стрілочному переводу (1). Інформацію про кількість осей, що пройшли через кожен датчик направляють до системи електричної централізації (7). На основі отриманої інформації підсистема забезпечення безпеки (5) визначають вільність/зайнятість колійних ділянок та за допомогою (6) пристроїв спряження з об'єктами залізничної інформації (7) включають на світлофорах (8) відповідне показання. У разі проїзду частини PC точкового колійного датчика (2) Д3 та усього PC колійного датчика Д3 підсистема забезпечення безпеки визначає зайнятість колійної ділянки між датчиками Д2 та Д3 й унеможливлює рух поїздів по відхиленню стрілочного переводу № 1, включаючи на відповідних світлофорах (8) заборонне показання через фактичну наявність PC у зоні граничного стовпчика (3). Повне прослідування PC колійних датчиків Д2 та Д3 свідчить про фактичну відсутність його у зоні граничного стовпчика. Цей спосіб дозволить фактично визначати місцезнаходження PC на стрілочній колійній ділянці залізничної станції. У разі виявлення проїзду граничного стовпчика система надає змогу виконувати переміщення іншого PC по протилежному положенню стрілочного переводу. Це дозволяє збільшити пропускну здатність залізничних станцій, підвищити безпеку руху без додаткової перевірки умов. 2 UA 110319 U Також відсутня необхідність використання ізолюючих стиків та рейкових кіл для визначення знаходження поїзду і використання додаткової апаратури для пропуску тягового струму в обхід ізолюючих стиків, не треба значної додаткової перевірки умов безпеки руху при наявності негабаритних колійних ділянок поїздів по протилежному положенню стрілочного переводу. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 1. Спосіб контролю місцезнаходження рухомого складу на стрілочній колійній ділянці залізничної станції, при якому системою електричної централізації отримують у реальному часі інформацію про фактичне місцезнаходження рухомого складу у зоні граничного стовпчика на стрілочній колійній ділянці й у разі небезпечного його перебування для руху поїзду, блокують на світлофорах рух, який відрізняється тим, що встановлюють точкові колійні датчики, які розміщують на відстані не менше 3,5 м від граничного стовпчика у кожному напрямку руху по стрілочному переводу, а після отримання інформації про кількість осей, що зафіксовані кожним датчиком, інформацію направляють до системи електричної централізації, при цьому на основі отриманої інформації за допомогою підсистеми забезпечення безпеки визначають вільність/зайнятість колійних ділянок та пристроєм спряження з об'єктами залізничної інформації включають на світлофорах відповідне показання. 2. Спосіб за п. 1, який відрізняється тим, що у разі фактичної відсутності рухомого складу у зоні граничного стовпчика, виконують переміщення поїздів по протилежному положенню стрілочного переводу. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: залізничої, контролю, станції, стрілочний, рухомого, колійний, ділянці, спосіб, місцезнаходження, складу
Код посилання
<a href="https://ua.patents.su/5-110319-sposib-kontrolyu-misceznakhodzhennya-rukhomogo-skladu-na-strilochnijj-kolijjnijj-dilyanci-zaliznicho-stanci.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю місцезнаходження рухомого складу на стрілочній колійній ділянці залізничої станції</a>
Пристрій для поточного контролю механічної частини рухомого складу залізниць
Номер патенту: 83459
Опубліковано: 25.07.2008
Автори: Кирпа Георгій Миколайович, Дьомін Юрій Васильович, Дьомін Ростислав Юрійович, Дмитрієв Дмитро Вікторович
МПК: B61K 9/00
Мітки: механічної, складу, пристрій, поточного, залізниць, контролю, рухомого, частини
Формула / Реферат:
Пристрій для поточного контролю механічної частини рухомого складу залізниць, що включає блок виміру вертикальних та горизонтальних віброприскорень кузова одиниці рухомого складу, зв'язаний блоком сполучення з ЕОМ, блок електричного живлення та блок пам'яті, який відрізняється тим, що він, по-перше, обладнаний розташованим на одиниці рухомого складу бортовим реєстратором з блоком контролю поздовжніх віброприскорень, датчик котрого закріплено...
Спосіб дистанційного акустичного контролю рейкового рухомого складу під час руху
Номер патенту: 62327
Опубліковано: 25.08.2011
Автори: Бондаренко В'ячеслав Володимирович, Скуріхін Дмитро Ігорович, Візняк Руслан Іванович
Мітки: контролю, рейкового, акустичного, дистанційного, спосіб, складу, руху, рухомого
Формула / Реферат:
Спосіб дистанційного акустичного контролю рейкового рухомого складу під час руху, який відрізняється тим, що замість генерації ультразвукових коливань у об'єкті контролю та приймання віддзеркалених від дефектів сигналів проводять реєстрацію параметрів пружних коливань повітря звукового діапазону від взаємодії у елементах ходових частин та підвагонного обладнання (колесо, буксовий вузол, генератор та його привід) під час рейсу поїзда,...
Пристрій для поточного контролю механічної частини рухомого складу залізниць
Номер патенту: 2290
Опубліковано: 15.01.2004
Автори: Дьомін Ростислав Юрійович, Кирпа Георгій Миколайович, Дьомін Юрій Васильович, Дмитрієв Дмитро Вікторович
МПК: B61K 9/00
Мітки: складу, механічної, частини, залізниць, пристрій, контролю, рухомого, поточного
Формула / Реферат:
Пристрій для поточного контролю механічної частини рухомого складу залізниць, що включає блок виміру вертикальних та горизонтальних віброприскорень кузова одиниці рухомого складу, зв'язаний блоком сполучення з ЕОМ, блок електричного живлення та блок пам'яті, який відрізняється тим, що він обладнаний розташованим на одиниці рухомого складу бортовим реєстратором з блоком контролю поздовжніх віброприскорень, датчик котрого закріплено на рамі...
Спосіб автоматичного контролю технічного стану колісних пар рухомого складу
Номер патенту: 13087
Опубліковано: 15.03.2006
Автори: Осенін Юрій Іванович, Войтенко Галина Олегівна
МПК: B61K 9/00
Мітки: контролю, технічного, стану, складу, рухомого, спосіб, автоматичного, пар, колісних
Формула / Реферат:
Спосіб автоматичного контролю технічного стану колісних пар рухомого складу, згідно з яким в контрольованому виробі, під кутом до його поверхні, збуджують ультразвукові коливання у вигляді нормальних хвиль асиметричної нульової моди за критичним кутом падіння Релея, приймають віддзеркалені від зерен метала та дефектів сигнали і визначають їх величину за результатами порівняння амплітуд віддзеркалених сигналів з еталонним значенням, збуджують...
Спосіб контролю коліс під час руху рухомого складу
Номер патенту: 18779
Опубліковано: 15.11.2006
Автори: Войтенко Галина Олегівна, Войтенко Володимир Панасович, Осенін Юрій Іванович
МПК: B61K 9/00
Мітки: спосіб, рухомого, руху, контролю, складу, коліс
Формула / Реферат:
Спосіб контролю коліс під час руху рухомого складу, відповідно якому в колесі збуджують ультразвукові коливання у вигляді поверхневих акустичних хвиль Релея, приймають відбивні від дефектів сигнали і визначають їх величину за результатами порівняння амплітуд відбивних сигналів з еталонним значенням та виявляють місце знаходження дефекту за часом запізнювання відбивних хвиль, який відрізняється тим, що поверхневим акустичним хвилям надають...