Крокуючий екскаватор-драглайн
Номер патенту: 111902
Опубліковано: 25.11.2016
Автори: Дзержинська Ольга Віталіївна, Соколов Володимир Миколайович
Формула / Реферат
1. Крокуючий екскаватор-драглайн, що містить опорну раму (базу) з опорно-поворотним колом, оснащену механізмом обертання та встановлену на опорно-поворотне коло поворотну платформу, на якій розміщені стріла з робочим устаткуванням у вигляді ковша з підвіскою, підйомна лебідка, що включає редуктор з двома барабанами і двома привідними електродвигунами, тягова лебідка, що включає редуктор з двома барабанами і двома привідними електродвигунами, два ексцентрикові вали, які встановлені в опорних стояках поворотної платформи з можливістю обертання, кінематично зв'язані з опорними ногами та лижами та утворюють механізм крокування, який відрізняється тим, що механізм крокування оснащений двома окремими редукторами, наприклад циліндричними, що встановлені на поворотній платформі симетрично відносно її подовжній осі, при цьому вихідний вал кожного редуктора кінематично зв'язаний з відповідним ексцентриковим валом.
2. Крокуючий екскаватор-драглайн за п. 1, який відрізняється тим, що вали електродвигунів тягової лебідки виконані з двома робочими кінцями, при цьому з'єднання одного кінця вала кожного електродвигуна з вхідним валом редуктора тягової лебідки, а іншого кінця вала електродвигуна з вхідним валом редуктора механізму крокування забезпечено почерговим вмиканням відповідних керованих муфт.
Текст
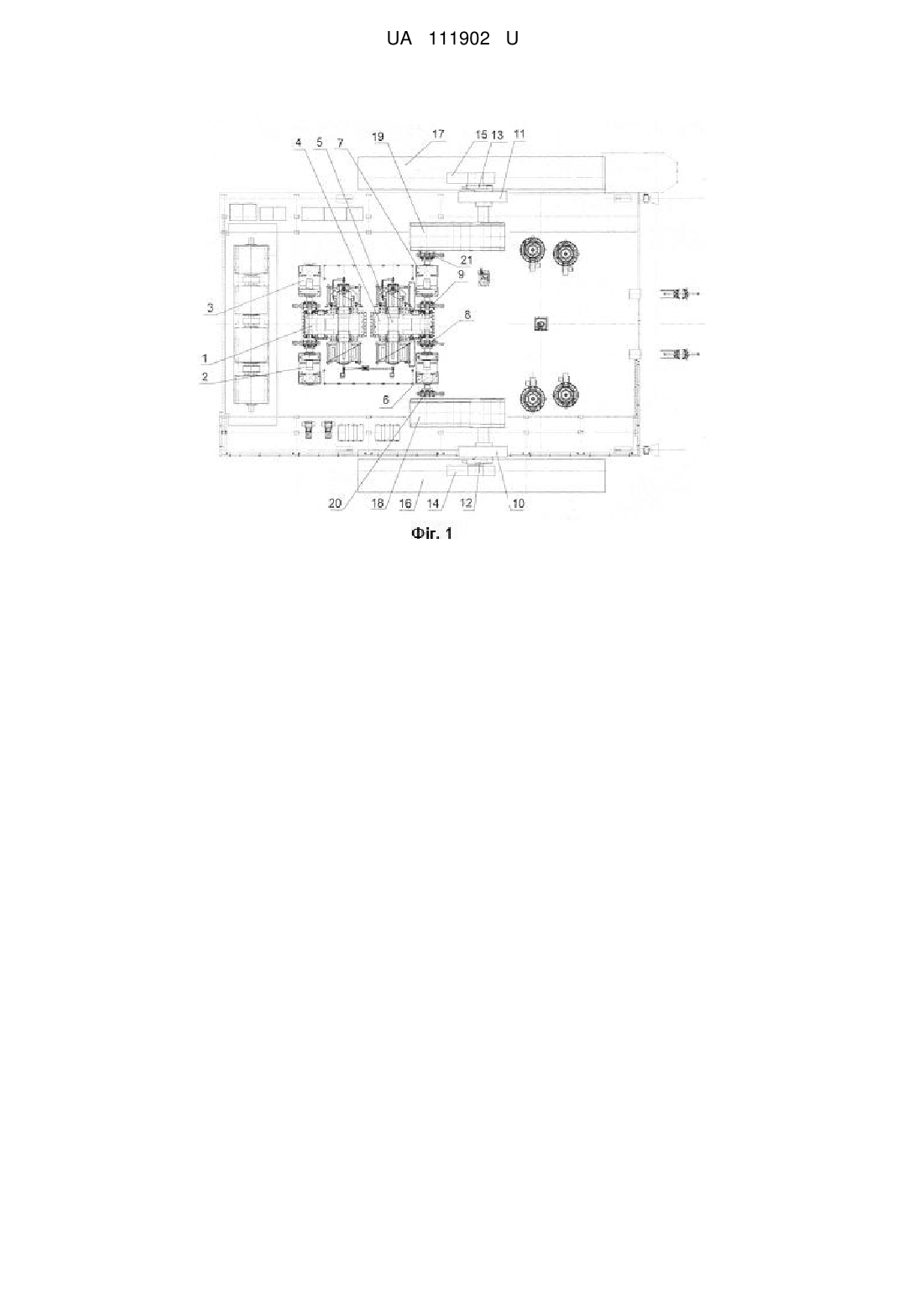
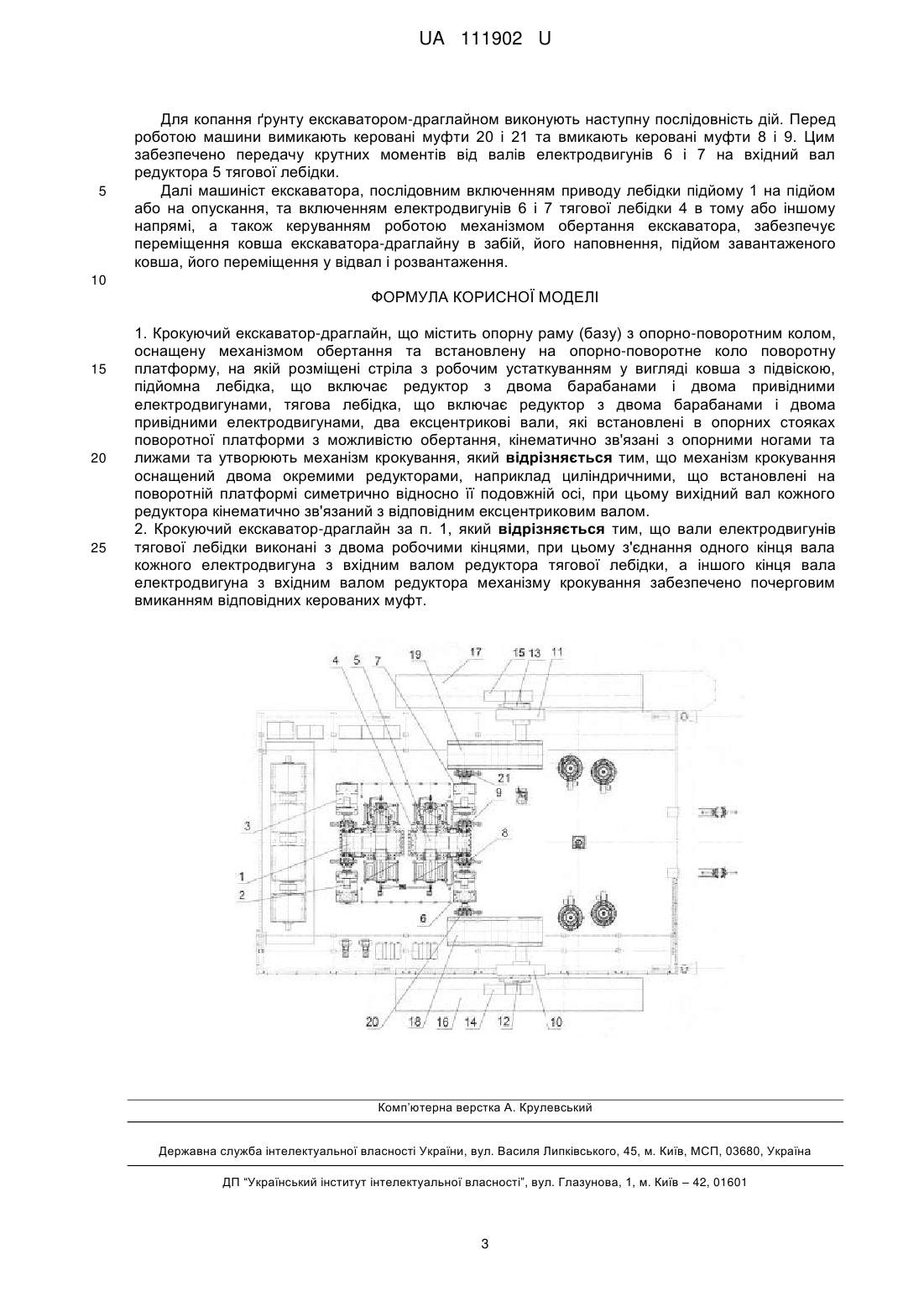
Реферат: Крокуючий екскаватор-драглайн містить опорну раму (базу) з опорно-поворотним колом, оснащену механізмом обертання та встановлену на опорно-поворотне коло поворотну платформу, на якій розміщені стріла з робочим устаткуванням у вигляді ковша з підвіскою, підйомна лебідка, що включає редуктор з двома барабанами і двома привідними електродвигунами, тягова лебідка, що включає редуктор з двома барабанами і двома привідними електродвигунами, два ексцентрикові вали, кінематично зв'язані з опорними ногами та лижами та утворюють механізм крокування. Механізм крокування оснащений двома окремими редукторами, наприклад циліндричними, що встановлені на поворотній платформі симетрично відносно її подовжній осі. При цьому вихідний вал кожного редуктора кінематично зв'язаний з відповідним ексцентриковим валом. UA 111902 U (54) КРОКУЮЧИЙ ЕКСКАВАТОР-ДРАГЛАЙН UA 111902 U UA 111902 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі екскавації, а саме до екскаваторів-драглайнів і може бути використана під час проектування механізмів крокування екскаватора великої потужності. Відомий екскаватор-драглайн, що забезпечений важільним механізмом крокуючим з гідравлічним приводом. Механізм крокування встановлено на экскаваторах-драглайнах, що мають велику потужність, наприклад ЭШ-15/90, ЭШ 25/90 виробництв УЗТМ. (див. наприклад, книгу "Горные машины и комплексы для открытых работ. Подэрни Р. Ю., М., "Недра", 1971 рік. стор. 209 рис. 112). Головний недолік вищезгаданих екскаваторів-драглайнів - велика вірогідність витоків гідравлічної рідини (оливи) з привідних гідроциліндрів в процесі експлуатації машини та складність обслуговування гідросистем механізму крокування. Відомий також крокуючий екскаватор-драглайн, що включає опорну раму (базу) з опорноповоротним колом та поворотну платформу, що оснащена механізмом обертання та встановлена на опорно-поворотне коло. На поворотній платформі змонтовано підйомну лебідку і тягову лебідку, стрілу з робочим устаткуванням у вигляді ковша з підвіскою, що зв'язаний за допомогою тягового та підйомного канатів з барабанами тягової і підйомної лебідок. Тягова лебідка як і підйомна лебідка містять циліндричний редуктор, що забезпечений двома канатними барабанами та приводиться до руху двома електродвигунами. Екскаватор також оснащений крокуючим механізмом кривошипно-важільного типу у вигляді двох кривошипів (ексцентриків), що встановлені в опорних стояках поворотної платформи з можливістю обертання. Кожен ексцентрик за допомогою шарніра зв'язаний з опорним важелем (опорною ногою). Верхній кінець опорної ноги за допомогою гонка шарнірно зв'язаний з відповідним опорним стояком поворотної платформи, а нижній кінець опорної ноги за допомогою кульової опори зв'язаний з опорною балкою (лижею). Привід механізму крокування включає циліндричний багатоступінчастий редуктор, що розташований уздовж подовжньої осі поворотної платформи і приводиться до дії за допомогою електродвигуна. Вихідний вал редуктора за допомогою двох трансмісійних валів зв'язаний з шестернями відкритих зубчастих передач. Зубчасте колесо кожної відкритої зубчастої передачі жорстко з'єднане з ексцентриковим валом (див. наприклад, книгу "Горнорудное и сталеплавильное оборудование. Сборник статей", М.: "Центральный институт научно-технической информации машиностроения". 1959 р. стор. 69-70, фіг. 10, 11). По сукупності істотних ознак вищеописаний екскаватор-драглайн є найбільш близьким до корисної моделі, тобто є найближчим аналогом. Суттєвий недолік найближчого аналога - це наявність двох трансмісійних валів, що обертаються та сполучають вихідний вал редуктора приводу механізму крокування з відкритими зубчастими передачами. Трансмісійні вали, що обертаються, потребують спеціального обгороджування та перегороджують робочий простір кузову екскаватора, що є додатковою перешкодою під час обслуговування механізмів, встановлених на поворотній платформі та можуть служити джерелом підвищеної небезпеки для обслуговуючого персоналу. В основу корисної моделі поставлено задачу збільшити робочий простір на поворотній платформі екскаватора-драглайна та підвищити безпеку обслуговування встановлених на ній механізмів шляхом вдосконалення конструкції приводу механізму крокування та за рахунок технічного результату, що полягає в усуненні проміжних ланок у вигляді трансмісійних валів, що обертаються, під час передавання крутних моментів від вала електродвигуна до ексцентрикових валів механізму крокування. Поставлена задача вирішена за рахунок того, що у крокуючому екскаваторі-драглайні, що містить опорну раму з опорно-поворотним колом, оснащену механізмом обертання та встановлену на опорно-поворотне коло, поворотну платформу із стрілою та робочим обладнанням у вигляді ковша з підвіскою, що зв'язаний за допомогою тягового и підйомного канатів з барабанами тягової та підйомної лебідок, а також встановлені на поворотній платформі підйомну лебідку, що містить редуктор з барабанами та двома електродвигунами, тягову лебідку з редуктором та двома електродвигунами, два ексцентрикових вали, що встановлені в опорних стояках поворотної платформи з можливістю обертання та кінематично зв'язані з опорними ногами та лижами і утворюють механізм крокування, згідно з корисною моделлю, механізм крокування оснащений двома окремими редукторами, наприклад циліндричними, що закріплені біля опорних стояків поворотної платформи, при цьому, вихідний вал кожного редуктора кінематично зв'язаний з відповідним ексцентриковим валом. Згідно з корисною моделлю, вали електродвигунів тягової лебідки виконані з двома робочими кінцями садіння та оснащені керованими муфтами з гальмівними шківами, при цьому з'єднання одного кінця вала кожного електродвигуна з вхідним валом редуктора тягової лебідки, 1 UA 111902 U 5 10 15 20 25 30 35 40 45 50 55 60 а другого кінця вала електродвигуна - з вхідним валом циліндричного редуктора механізму крокування забезпечено почерговим вмиканням або вимиканням відповідних керованих муфт. Тільки завдяки тому, що у крокуючому екскаваторі-драглайні, механізм крокування оснащений двома окремими редукторами, наприклад циліндричними, що закріплені біля опорних стояків поворотної платформи, при цьому вихідний вал кожного редуктора кінематично зв'язаний з відповідним ексцентриковим валом, а вали електродвигунів тягової лебідки виконані з двома робочими кінцями та забезпечені керованими муфтами з гальмівними шківами, при цьому з'єднання одного кінця вала кожного електродвигуна з вхідним валом редуктора тяглової лебідки, а іншого кінця вала електродвигуна з вхідним валом циліндричного редуктора механізму крокування забезпечено почерговим вмиканням відповідних керованих муфт, усунуто додаткові проміжні ланки під час передачі крутного моменту від електродвигуна до ексцентрикових валів у вигляді трансмісійних валів, що обертаються, збільшений робочий простір поворотної платформи і підвищено безпеку обслуговування механізмів екскаватора драглайна. Додатковий корисний результат, що полягає в зменшенні металомісткості та ваги механізму крокування екскаватора-драглайна, забезпечений за рахунок використання для приведення до руху механізму крокування електродвигунів тягової лебідки, що почергово вмикаються за допомогою керованих муфт або до вхідного вала редуктора тягової лебідки, або до вхідних валів циліндричних редукторів механізму крокування. Корисна модель є промислово застосовною і може бути використана під час проектування екскаватора-драглайна підвищеної потужності. Корисна модель пояснюється кресленням, де приведено схему поворотної платформи екскаватора-драглайна. На поворотній платформі крокуючого екскаватора-драглайна (див. креслення) розташовані лебідка підйому 1, що включає циліндричний редуктор з двома канатними барабанами, який приводиться до дії за допомогою двох електродвигунів 2 і 3, тягова лебідка 4, що включає циліндричний редуктор 5 з двома канатними барабанами, встановленими на його вихідному валу. Тягова лебідка 4 приводиться до дії за допомогою двох електродвигунів 6 і 7, що сполучені з вхідним валом циліндричного редуктора 5 за допомогою сполучних муфт 8 і 9, виконаних з гальмівними шківами. По краях поворотної платформи, симетрично до подовжньої осі, в опорних стояках 10 і 11 встановлені з можливістю обертання правий 12 та лівий 13 ексцентрикові вали механізму крокування. Ексцентрикові вали 12 і 13 шарнірно сполучені з опірними ногами 14 і 15. Опорні ноги 14 і 15 за допомогою кульових опор встановлені на опорні лижі 16 і 17. Відмітними особливостями корисної моделі є: Механізм крокування оснащений двома окремими циліндричним багатоступінчастими редукторами 18 і 19, що встановлені на поворотній платформі, симетрично відносно її подовжній осі. Вихідний вал редуктора 18 кінематично зв'язаний з правим ексцентриковим валом 12, а вихідний вал редуктора 19 кінематично зв'язаний з лівим ексцентриковим валом 13. вали електродвигунів 6 і 7 виконані з двома робочими кінцями, при цьому другі кінці валів електродвигунів сполучені з вхідними валами редукторів механізму крокування, а саме кінець вала електродвигуна 6 сполучений за допомогою муфти з гальмівним шківом 20 з вхідним валом редуктора 18, а кінець вала електродвигуна 7 сполучений за допомогою муфти з гальмівним шківом 21 з вхідним валом редуктора 19. муфти 8, 9, 20 і 21 виконані керованими, при цьому при включенні в роботу муфт 8 і 9, муфти 20 і 21 автоматично відключаються і навпаки. Цим забезпечена неможливість одночасного обертання електродвигунами 6 і 7 вхідного вала редуктора 5 тягової лебідки та вхідних валів редукторів 18 і 19 механізму крокування. Працює заявлена корисна модель таким чином. Для переміщення екскаватора-драглайна - так званого "крокування", виконують відключення керованих муфт 8 і 9 від вхідного вала редуктора 5 тягової лебідки. Водночас вмикають керовані муфти 20 і 21, що з'єднують вали електродвигунів 6 та 7 з вхідними валами редукторів 18 і 19. Цим забезпечено передачу крутних моментів, від валів вищезгаданих електродвигунів на вхідні вали редукторів 18 і 19 механізму крокування. Крутні моменти за допомогою зубчастих передач редукторів 18 і 19 передаються на ексцентрикові вали 12 і 13. Обертаючись, ексцентрикові вали 12 і 13 забезпечують плоско-паралельне переміщення опорних ніг 14 і 15 з відповідними опорними лижами 16 і 17 за заданою, близькою до еліптичної, траєкторією з визначеною періодичністю та кроком. Це забезпечує переміщення екскаватора-драглайна в необхідному напрямі. Синхронність обертання валів електродвигунів 6 і 7 забезпечено за допомогою системи керування приводом крокування. 2 UA 111902 U 5 Для копання ґрунту екскаватором-драглайном виконують наступну послідовність дій. Перед роботою машини вимикають керовані муфти 20 і 21 та вмикають керовані муфти 8 і 9. Цим забезпечено передачу крутних моментів від валів електродвигунів 6 і 7 на вхідний вал редуктора 5 тягової лебідки. Далі машиніст екскаватора, послідовним включенням приводу лебідки підйому 1 на підйом або на опускання, та включенням електродвигунів 6 і 7 тягової лебідки 4 в тому або іншому напрямі, а також керуванням роботою механізмом обертання екскаватора, забезпечує переміщення ковша екскаватора-драглайну в забій, його наповнення, підйом завантаженого ковша, його переміщення у відвал і розвантаження. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 1. Крокуючий екскаватор-драглайн, що містить опорну раму (базу) з опорно-поворотним колом, оснащену механізмом обертання та встановлену на опорно-поворотне коло поворотну платформу, на якій розміщені стріла з робочим устаткуванням у вигляді ковша з підвіскою, підйомна лебідка, що включає редуктор з двома барабанами і двома привідними електродвигунами, тягова лебідка, що включає редуктор з двома барабанами і двома привідними електродвигунами, два ексцентрикові вали, які встановлені в опорних стояках поворотної платформи з можливістю обертання, кінематично зв'язані з опорними ногами та лижами та утворюють механізм крокування, який відрізняється тим, що механізм крокування оснащений двома окремими редукторами, наприклад циліндричними, що встановлені на поворотній платформі симетрично відносно її подовжній осі, при цьому вихідний вал кожного редуктора кінематично зв'язаний з відповідним ексцентриковим валом. 2. Крокуючий екскаватор-драглайн за п. 1, який відрізняється тим, що вали електродвигунів тягової лебідки виконані з двома робочими кінцями, при цьому з'єднання одного кінця вала кожного електродвигуна з вхідним валом редуктора тягової лебідки, а іншого кінця вала електродвигуна з вхідним валом редуктора механізму крокування забезпечено почерговим вмиканням відповідних керованих муфт. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E02F 3/48
Мітки: крокуючий, екскаватор-драглайн
Код посилання
<a href="https://ua.patents.su/5-111902-krokuyuchijj-ekskavator-draglajjn.html" target="_blank" rel="follow" title="База патентів України">Крокуючий екскаватор-драглайн</a>
Екскаватор-драглайн
Номер патенту: 6732
Опубліковано: 16.05.2005
Автори: Буренко Олександр Георгійович, Калашніков Олег Юрієвич, Дзержинський Віталій Олександрович, Чижик Володимир Васильович, Борніков Леонід Миколайович
МПК: E02F 3/46
Мітки: екскаватор-драглайн
Формула / Реферат:
1. Екскаватор-драглайн, що містить встановлені на поворотній платформі робочі механізми, зрівноважуючий вантаж і стрілу ґратчастої конструкції, на нижньому поясі якої закріплені стійки, на які опирається стягуючий канат, оснащений натяжним пристроєм, який відрізняється тим, що натяжний пристрій виконано тягаревим, при цьому для тягаря використана частина зрівноважуючого вантажу, підвішена до стягуючого каната, пропущеного через систему...
Екскаватор-драглайн
Номер патенту: 14371
Опубліковано: 25.04.1997
Автори: Крикун Євген Дмитрович, Гонцул Володимир Олексійович, Козак Леонід Григорович, Ескін Володимир Самуілович, Олюха Віктор Сергійович, Малушка Олександр Іванович, Лєляков Ігор Іванович, Бенько Микола Петрович, Гончаренко Володимир Андрійович
МПК: E02F 3/46
Мітки: екскаватор-драглайн
Формула / Реферат:
Экскаватор-драглайн, включающий смонтированную на ходовой части поворотную платформу со стрелой и ковш с проушинами тяговых цепей и подъемными цепями, соединенными с подъемной лебедкой, тяговую лебедку и направляющие блоки, отличающийся тем, что, с целью расширения технологических возможностей путем увеличения глубины черпания при разработке горизонтального забоя, он снабжен дополнительной поворотной платформой, на которой смонтированы...
Екскаватор-драглайн
Номер патенту: 9998
Опубліковано: 30.09.1996
Автори: Швець Володимир Григорович, Марченко Анатолій Іванович, Беклєшова Ольга Георгієвна
МПК: E02F 3/46
Мітки: екскаватор-драглайн
Формула / Реферат:
1. Экскаватор-драглайн, включающий поворотную платформу с рабочим оборудованием и ходовую часть, смонтированные на опорной базе, содержащей кольцевые и радиальные элементы, образующие периферийную и центральную полости, и теплонесущие установки, отличающийся тем, что в радиальных элементах выполнены расположенные по окружности сквозные проемы, а теплонесущие установки расположены диаметрально противоположно в периферийной и центральной...
Крокуючий механізм
Номер патенту: 59103
Опубліковано: 10.05.2011
Автори: Крупко Ігор Валерійович, Пенчук Валентин Олексійович, Сіменченко Анатолій Кіролович
МПК: B62D 57/00, E02F 9/04
Формула / Реферат:
Крокуючий механізм, який вміщує чотири попарно спряжені у площині руху приводні кривошипні механізми з опорними лижами, який відрізняється тим, що на кожному з протилежно розміщених приводних валів ексцентриків шарнірно установлені шатуни з окремими для кожного із них опорними башмаками (лижами), лижі шарнірно поєднані з шатунами таким чином, що положення кожної із лиж незалежне одне від одного.
Крокуючий хід для важких кар’єрних екскаваторів-лопат
Номер патенту: 46019
Опубліковано: 15.05.2002
Автори: Калашніков Олег Юрійович, Літвінов Леонід Іванович, Марченко Анатолій Іванович, Буренко Олександр Георгійович
МПК: E02F 9/02
Мітки: важких, кар'єрних, хід, екскаваторів-лопат, крокуючий
Формула / Реферат:
Крокуючий хід, переважно для важких кар'єрних екскаваторів-лопат, який включає неповоротну раму, на якій установлено чотири попарно-спряжених в площині руху кривошипних механізмів крокування з опорними лижами, який відрізняється тим, що кожний механізм крокування виконано в вигляді привідних коліс, з розміщеними на їх торцях діаметрально протилежно двома ексцентриками, повернутими всередину і назовні рами, при цьому ексцентрики, які повернуті...
Попередній патент: Складений прокатний валок
Наступний патент: Ущільнювач флотошламу
Випадковий патент: Спосіб одержання керамічного порошку