Крокуючий хід для важких кар’єрних екскаваторів-лопат
Номер патенту: 46019
Опубліковано: 15.05.2002
Автори: Буренко Олександр Георгійович, Калашніков Олег Юрійович, Марченко Анатолій Іванович, Літвінов Леонід Іванович
Формула / Реферат
Крокуючий хід, переважно для важких кар'єрних екскаваторів-лопат, який включає неповоротну раму, на якій установлено чотири попарно-спряжених в площині руху кривошипних механізмів крокування з опорними лижами, який відрізняється тим, що кожний механізм крокування виконано в вигляді привідних коліс, з розміщеними на їх торцях діаметрально протилежно двома ексцентриками, повернутими всередину і назовні рами, при цьому ексцентрики, які повернуті всередину рами, через шатуни зв'язані з кінцями внутрішніх лиж, а ексцентрики, які повернуті назовні рами, зв'язані через шатуни з кінцями зовнішніх лиж.
Текст
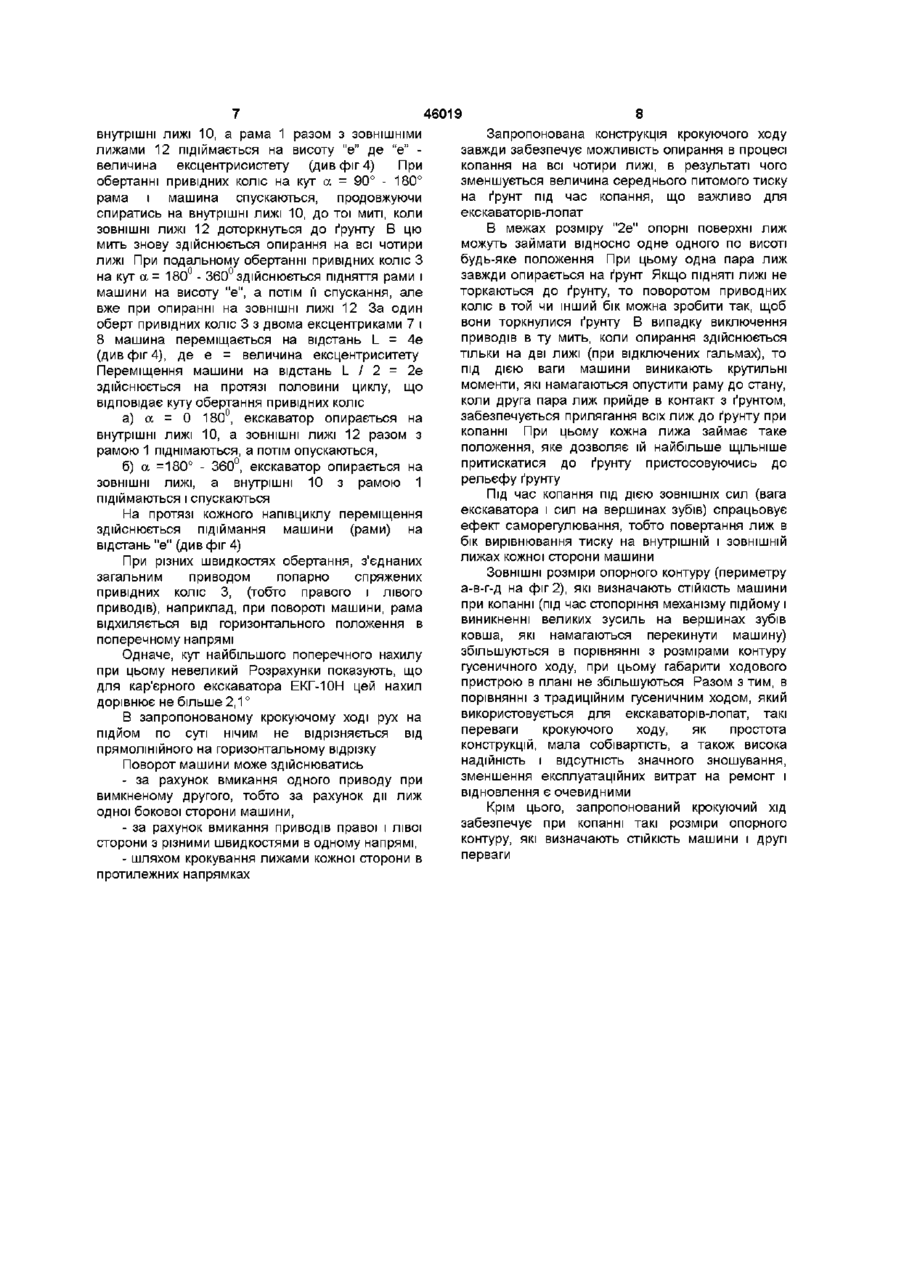
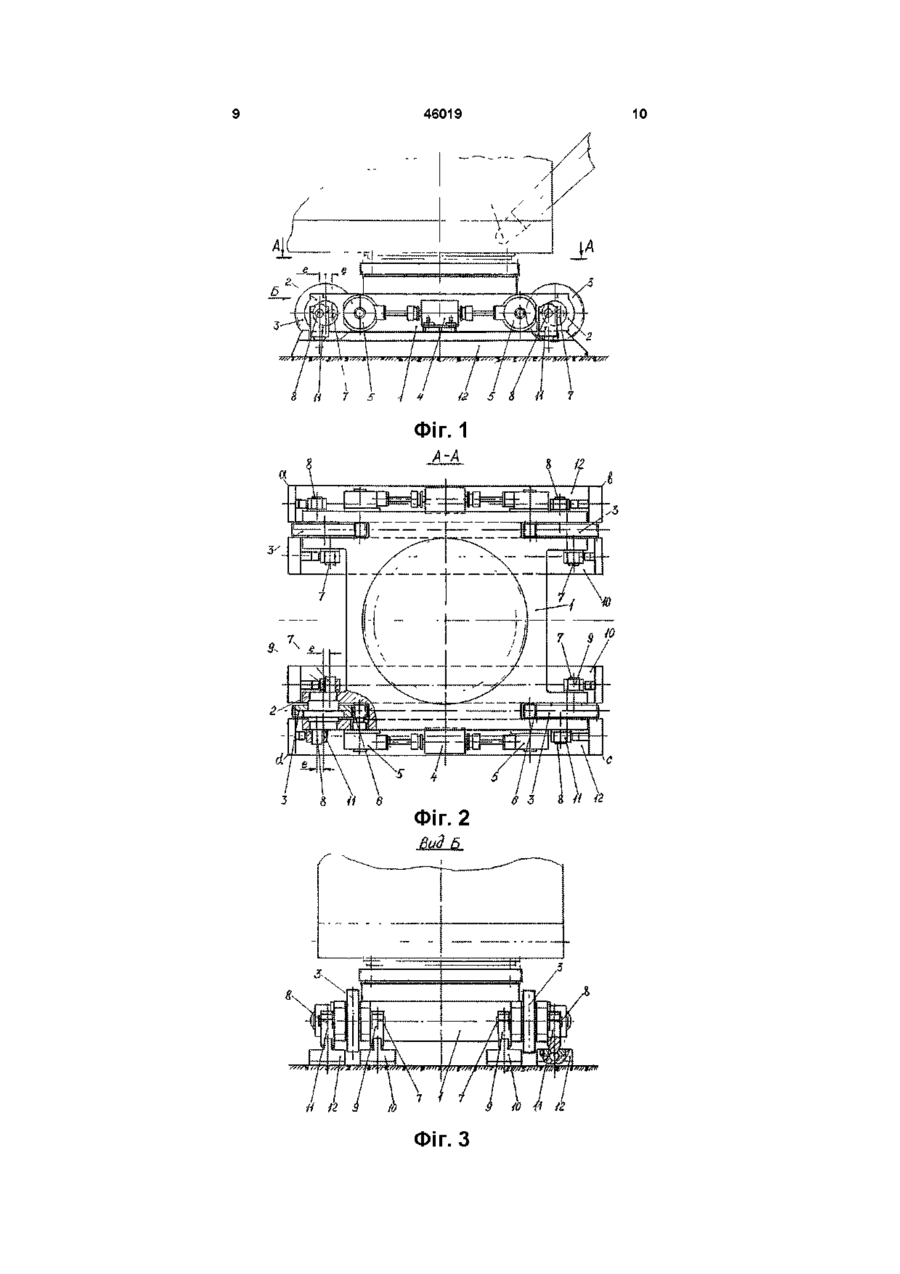
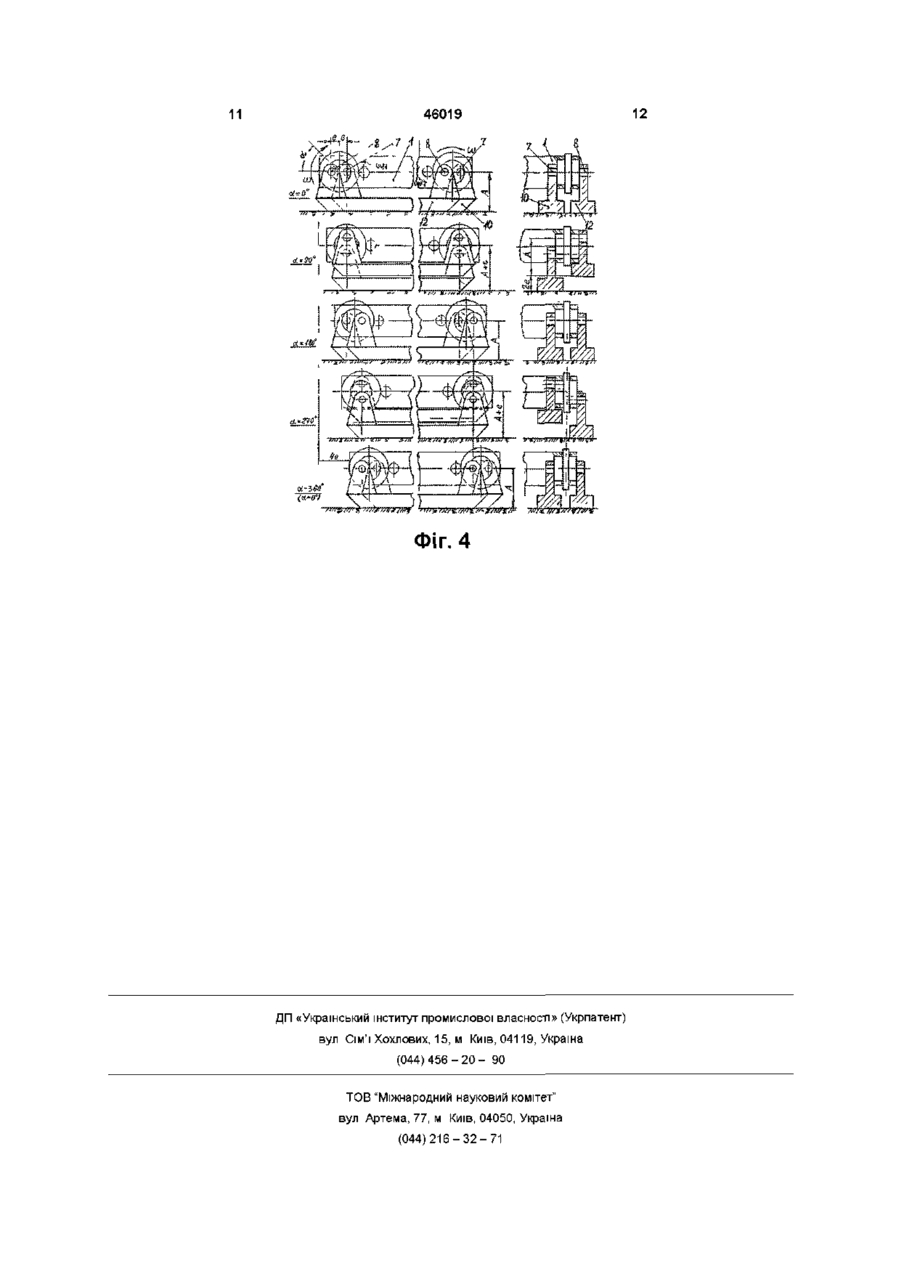
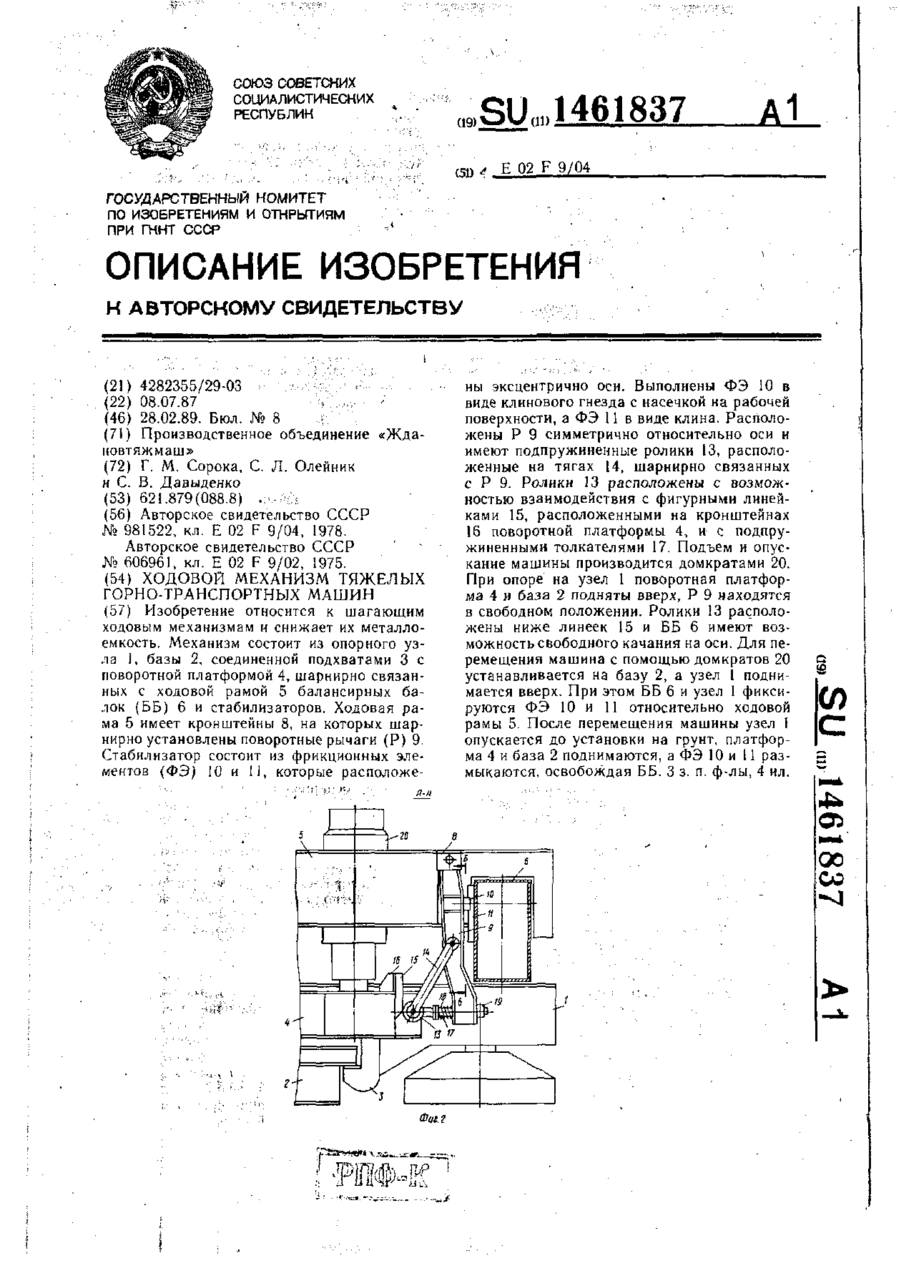
Крокуючий хід, переважно для важких кар'єрних екскаваторів-лопат, який включає Винахід відноситься до гірничих машин, а саме до ходового обладнання гірничих машин Відомо достатньо багато різних конструкцій механізмів крокування, які використовуються в екскаваторах і другому гірничому обладнані, наприклад, відвалоутворювачах Найбільш розповсюдженими є крокуюче ходове обладнання, яке використовується майже на всіх середніх та потужних екскаваторахдраглайнах (див мал 3 14, Н3 Гармаш, Ю Й Бережной, Конструкции, основы теории и расчета шагающего ходового оборудования горнотранспортных машин М "Недра" 1971 г, 142 с) В указаних конструкціях привід механізмів крокування з лижами установлено на поворотній частині машини, при крокуванні опирання відбувається на три опори (крокуючий хід з трьома опорами-дві лижі і край бази), а в робочому стані опирання відбувається тільки на базу ВІДОМІ також конструкції крокуючого ходу з повним відривом бази від ґрунту при крокуванні (чотирьохопорний крокуючий хід - чотири ноги, які спираються на чотири лижі), із опиранням під час роботи тільки на базу (див мал 9, 10, 13, 15, а с СРСР № 462761 по кл E02F 9/04) В СВІТОВІЙ та ВІТЧИЗНЯНІЙ практиці в екскаваторах-лопатах середньої та великої потужності використовується виключно гусеничний хід, який поряд з відомими перевагами має ряд суттєвих недоліків, найважливішими з них є 1 Велика вага (до 40 - 50% з нижньою рамою) неповоротну раму, на якій установлено чотири попарно-спряжених в площині руху кривошипних механізмів крокування з опорними лижами, який відрізняється тим, що кожний механізм крокування виконано в вигляді привідних коліс, з розміщеними на їх торцях діаметрально протилежно двома ексцентриками, повернутими всередину і назовні рами, при цьому ексцентрики, які повернуті всередину рами, через шатуни зв'язані з кінцями внутрішніх лиж, а ексцентрики, які повернуті назовні рами, зв'язані через шатуни з кінцями ЗОВНІШНІХ лиж від ваги екскаватора і висока вартість 2 Складність виготовлення і збирання, обумовлені складністю самої конструкції 3 Швидке зношування ходових елементів і зв'язані з цим високі експлуатаційні витрати 4 Більш значний в порівнянні з крокуючим ходом середній питомий тиск на ґрунт - до 3,5кг/см2 5 Високі показники максимального питомого тиску (при копанні), які перевищують в 2-х гусеничних системах в 6 -12 разів середній тиск 6 Значні енерговитрати на переміщення і т д Вище згадані недоліки відсутні в відомих конструкціях крокуючих механізмів, які відрізняються відносно невеликою вагою (10 - 12% від ваги машини), простотою конструкції і більш низькою собівартістю, незначним зношенням елементів, низькими експлуатаційними витратами, можливістю одержати малого питомого тиску Незважаючи на ВІДОМІ переваги крокуючого ходу, в екскаваторах-лопатах він не в и ко р исто вується Основною і головною причиною, яка перешкоджає використанню крокуючого ходу для екскаваторів-лопат є специфічні умови навантаження цих машин (прямих лопат) в процесі копання Якщо в драглайнах і других машинах при їх роботі рівнодіюча вертикальних сил (в основному сил тяжіння) не вибігає за ядро перерізу бази, то в екскаваторах-лопатах ситуація зовсім інша О О (О 46019 значного збільшення розмірів машини в плані, а також ходового пристрою і машини взагалі, а кінцевим результатом є збільшення вартості Одночасно, якщо поверхню лиж зробити таких же розмірів як гусениць, то збільшення розмірів в плані по ширині виходить досить значним Якщо ж лижі виконати довгими і вузькими, то значно збільшиться опір обертанню і потужність приводу, а також погіршаться умови прилягання лиж до ґрунту Це також відноситься і до бази 2 Чотирьох-ланцюгові кривошипно-ричажні механізми крокування, які використані в прототипі, не тільки складні по конструкції, але і мають значні габарити по вишині і їх розміщення на неповоротній рамі (замість гусеничного ходу) в усякому випадку приведе до збільшення розмірів рами по вишині В КІНЦІ-КІНЦІВ центр тяжкості машини буде піднятий (тому, що на нижній рамі встановлюється поворотна частина машини і СТІЙКІСТЬ машини при копанні погіршиться) Спроба використання в екскаваторах-лопатах відомого крокуючого ходу (прототипу) замість гусеничного з внесенням в конструкцію і принцип дії деяких непринципових змін, наприклад, в варіантах, коли опирання при копанні буде чинитись на базу і лижі одночасно (1-й варіант), або тільки на лижі (2-й варіант) також не дає позитивних результатів В обох варіантах загальний опорний контур повинен бути не Одною з причин, які перешкоджають меншим гусеничного ходу використовувати крокуючий хід на екскаваторахлопатах є також неможливість забезпечення В першому варіанті виникає проблема щільного прилягання опорної поверхні бази до з'єднання лиж з базою так, щоб вони під час ґрунту копання являли собою єдине ціле, а механізми крокування були розвантажені Найбільш близьким аналогом (прототипом) для заявленого крокуючого ходу є крокуючий хід Залишається той же недолік, тобто не відвальної опори транспортно-відвального мосту гарантується щільне прилягання до ґрунту по всій ОМГШ-50/50 (див книгу Гармаш Н Э , Бережной опорній поверхні Виникає проблема розміщення Ю Н , Конструкция, основы теории и расчета поворотного кругу на рамі, тому що він не може шагающего ходового оборудования горнозвисати над рамою, яка виходить в даному транспортных машин, М Недра 1971 г, стр 17, мал випадку дуже вузькою Тому потрібно збільшення 13) габаритів машини по ширині Загальними ознаками для прототипу і В другому варіанті виникає проблема заявленого крокуючого ходу є утримання всієї машини виваженою при копанні, коли навантаження на ходове обладнання в а) встановлення виконавчих механізмів результаті реалізації на вершинах зубів значних крокування на неповоротній рамі (базі), зусиль значно більших, чим маса машини Таке б) чотири виконавчих механізми крокування рішення зовсім неприйнятне, тому що потребує парами спряжені в площині руху, потужних тормозних пристроїв на механізмах в) шатуни кожного з механізмів з'єднані з крокування для утримання машини підвішеною, кінцями опорних лиж при цьому всі елементи механізмів мають В кожній із конструкцій крокування навантаження високого рівня здійснюється з повним відривом бази від ґрунту Разом з тим, використання згаданого Таким чином, використання прототипу в ролі крокуючого ходу в екскаваторах-лопатах (взамін крокуючого ходу для екскаваторів-лопат практично гусеничного) є неприйнятним в зв'язку з рядом неможливо, а рішення поставленого завданнясуттєвих недоліків створення крокуючого ходу для екскаваторалопати потребує кардинальних змін конструкції 1 В прототипі крокування здійснюється ходу, забезпечуючих технічний результат, шляхом переміжного опирання то на базу, то на прийнятий для екскаваторів-лопат лижі При роботі машини вона спирається на базу, а лижі ПІДНЯТІ і не навантажені Якщо використати В основу винаходу покладена задача-створити такий хід замість гусеничного в екскаваторахкрокуючий хід для середніх та важких кар'єрних лопатах, то опорний контур бази повинен бути не екскаваторів-лопат замість гусеничного ходу, який меншим опорного контуру гусеничного ходу Лижі має вищезгадані недоліки, без збільшення ПОВИННІ виходити за опорний контур бази і, крім розмірів та маси машини цього, забезпечити при крокуванні допустимий Ця задача вирішується за рахунок технічного рівень питомого тиску на ґрунт, (тобто, мати результату, який полягає в можливості опирання достатню площу опорної поверхні)-це веде до машини при копанні на всі чотири лижі з В прямих лопатах при копанні в результаті реалізації на вершинах зубів ковша значних динамічних зусиль (особливо в випадку стопоріння механізму підйому при розробці твердих ґрунтів) рівнодіюча ЗОВНІШНІХ сил (маса машини + динамічні зусилля на вершинах зубів ковша) виходить не тільки за поворотний круг, але часто і за межі опорної поверхні гусениць (опорний контур) В результаті цього при стопорінні механізму підйому екскаватор и-лопати часто працюють з відривом від ґрунту задньої частини машини, протилежної ковшу Якщо в екскаваторах-лопатах використати відомий крокуючий хід (наприклад, такого типу як у драглайнів), то для забезпечення рівнозначної СТІЙКОСТІ машини (такої як при гусеничному ході) опорний контур бази повинен бути не меншим, аніж опорний контур гусеничного ходу Крім того, щоб зберегти відому перевагу крокуючого ходу, яка полягає в можливості переміщення з місця в будь-якому напрямі, механізм крокування необхідно встановити на поворотній платформі, а лижі повинні мати можливість обходу контуру бази при обертанні, в зв'язку з цим контур бази - це коло Винесення лиж за межу кола веде до збільшення розмірів поворотної платформи в плані, а це привело б до значного збільшення маси машини забезпеченням - необхідної СТІЙКОСТІ машини при копанні за рахунок утворення лижами опорного контуру, який не поступається гусеничному ходу, - пристосування опорної поверхні лиж до нерівної підошви робочої площадки, - зниження середнього питомого тиску на ґрунт при копанні за рахунок опирання на всі чотири лижі з загальною площиною опорної поверхні більшою, ніж у гусеничного ходу (притому без збільшення габаритів і маси машини), вирівнювання питомого тиску лиж внутрішніми і ЗОВНІШНІМИ лижами кожного з боків машини Для досягнення цього технічного результату в крокуючому ході, який вміщує нижню неповоротну раму, на якій встановлені чотири напорноспряжені в площині руху кривошипні механізми крокування з опорними лижами, кожний механізм крокування виконаний в вигляді привідних коліс, на торцях яких установлено діаметральнопротилежно два ексцентрики, повернуті до рами і навпаки, при цьому, ексцентрики, які повернуті до рами через шатуни з'єднані з кінцями внутрішніх лиж, а ексцентрики, повернуті від рами, зв'язані через шатуни з кінцями ЗОВНІШНІХ лиж ВІДМІННИМИ ознаками заявленого винаходу в порівнянні з прототипом є те що кожний з чотирьох механізмів крокування, встановлених на неповоротній рамі, виконано в вигляді привідного колеса з розміщеними на його торцях і спрямованих всередину і назовні рами двома діаметрально протилежними ексцентриками, при цьому, ексцентрики повернуті всередину рами, через кривошипи зв'язані з кінцями внутрішніх лиж, а ексцентрики, повернуті назовні, через кривошипи зв'язані з кінцями ЗОВНІШНІХ лиж Між ВІДМІННИМИ ознаками і досягнутим технічним результатом є причинно-наслідковий зв'язок Завдяки тому, що з'єднані з лижами через шатуни ексцентрики розміщені діаметрально протилежно і повернуті всередину і назовні рами забезпечується опирання машини під час копання на всі чотири лижі з одержанням оптимального (який не поступається гусеничному ходу) опорного контуру і необхідної СТІЙКОСТІ при копанні без збільшення маси і габаритів ходового пристрою При цьому також забезпечується - пристосування лиж до нерівної поверхні підошви забою, - зменшення середнього питомого тиску на ґрунт при копанні, - вирівнювання тиску лиж внутрішніми і ЗОВНІШНІМИ лижами кожної сторони машини Все це дає можливість використання даного крокуючого ходу на екскаваторах-лопатах Оскільки запропонований крокуючий хід може бути використаний в інших машинах і обладнанні різноманітного призначення, для більш вірогідного визначення рівня техніки додатково вивчена патентна документація, яка має відношення до механізмів переміщення і ходовому обладнанню по Мкл B62D 57/02 В цій інформації не виявлена сукупність ознак, схожих ВІДМІННИМИ ознаками винаходу Таким 46019 чином, винахід задовольняє умовам новизни, тому, що в рівні техніки не виявлено аналог, сукупність ознак якого була б ідентична ознакам винаходу Із відомих різних конструкцій крокуючого ходового обладнання для одноковшевих екскаваторів-лопат ні одну не можна було використати з рівнозначним запропонованій конструкції корисним ефектом (який полягає в заміні складного і дорогого гусеничного ходу більш простим і дешевим крокуючим ходом), а в виявлених аналогах відсутні ВІДОМОСТІ, ЯКІ МОГЛИ б бути явним підказом для конструювання В даному випадку поставлена задача вирішена нетрадиційним шляхом і технічний результат не випливає з очевидністю із відомих властивостей крокуючих механізмів Більш того, переборено упередження спеціалістів про неможливість використання крокуючого ходу на екскаваторах-лопатах (див Домбровский Н Г "Экскаватори", М "Машиностроение", 1969г, стр 139, " к недостаткам шагающего хода относится непригодность его для экскаваторов лопат ") Крім того, як свідчить світова практика, крокуючий хід в екскаваторах-лопатах не в и ко р исто вується Все це свідчить, що заявлений винахід має винахідницький рівень, оскільки запропонований крокуючий хід для екскаваторів-лопат для спеціалістів явним чином не випливає з рівня техніки Заявлений крокуючий хід є промисловопридатним В даний час проведено аналіз і розрахункове обґрунтування ДОЦІЛЬНОСТІ використання для екскаватора-лопати ЙОГО ЕКГ-10Н (МІСТКІСТЬ ковша 10м3) Суть заявленого крокуючого ходу пояснюється кресленнями, де - на фіг 1 показано вид (з бокової сторони машини) на крокуючий пристрій, - на фіг 2 - переріз А-А на фіг 1 (вид в плані), - на фіг 3 - показано вид Б на фіг 1, - на фіг 4 - показана схема, яка відображає принцип переміщення і опирання ходового пристрою і машини в цілому Крокуючий хід складається з неповоротної рами 1 (фиг 1, 2, 3), на якій встановлені з бокових сторін в підшипниках 2 (наприклад ковзання) чотири привідних колеса 3 На кожній боковій стороні рами встановлені автономні приводи, які мають електродвигуни 4 (фиг 1, 2) і редуктори 5, взаємодіючі з привідними колесами 3 (фіг 1, 2, 3), наприклад, через відкриті зубчасті передачі 6 На протилежних торцях кожного з привідних коліс встановлені діаметрально протилежно (тобто зі зміщенням на 180°) ексцентрики 7 і 8 Ексцентрики 7, повернуті всередину рами і зв'язані через шатуни 9 з кінцями внутрішніх лиж 10, а ексцентрики 8 повернуті назовні рами, через шатуни 11 з'єднані з кінцями ЗОВНІШНІХ лиж 12 Принцип дії заявленого крокуючого ходу показано на фіг 4 Пристрій працює так Під час копання машина опирається на всі чотири лижі дві внутрішні 10 і дві ЗОВНІШНІ 12 Під час крокування при повороті привідних коліс 3 з ексцентриками 7 і 8 на кут а (а = 0 - 90°) машина опирається на 8 46019 внутрішні лижі 10, а рама 1 разом з ЗОВНІШНІМИ Запропонована конструкція крокуючого ходу лижами 12 підіймається на висоту "є" де "є" завжди забезпечує можливість опирання в процесі величина ексцентрисистету (див фіг 4) При копання на всі чотири лижі, в результаті чого обертанні привідних коліс на кут а = 90° - 180° зменшується величина середнього питомого тиску рама і машина спускаються, продовжуючи на ґрунт під час копання, що важливо для спиратись на внутрішні лижі 10, до тої миті, коли екскаваторів-лопат ЗОВНІШНІ лижі 12 доторкнуться до ґрунту В цю В межах розміру "2е" опорні поверхні лиж мить знову здійснюється опирання на всі чотири можуть займати відносно одне одного по висоті лижі При подальному обертанні привідних коліс З будь-яке положення При цьому одна пара лиж на кут а = 180° - 360° здійснюється підняття рами і завжди опирається на ґрунт Якщо ПІДНЯТІ ЛИЖІ не машини на висоту "є", а потім її спускання, але торкаються до ґрунту, то поворотом приводних вже при опиранні на ЗОВНІШНІ ЛИЖІ 12 За один коліс в той чи інший бік можна зробити так, щоб оберт привідних коліс 3 з двома ексцентриками 7 і вони торкнулися ґрунту В випадку виключення 8 машина переміщається на відстань L = 4е приводів в ту мить, коли опирання здійснюється (див фіг 4), де є = величина ексцентриситету тільки на дві лижі (при відключених гальмах), то Переміщення машини на відстань L / 2 = 2е під дією ваги машини виникають крутильні здійснюється на протязі половини циклу, що моменти, які намагаються опустити раму до стану, відповідає куту обертання привідних коліс коли друга пара лиж прийде в контакт з ґрунтом, забезпечується прилягання всіх лиж до ґрунту при а) а = 0 180°, екскаватор опирається на копанні При цьому кожна лижа займає таке внутрішні лижі 10, а ЗОВНІШНІ ЛИЖІ 12 разом з положення, яке дозволяє їй найбільше щільніше рамою 1 піднімаються, а потім опускаються, притискатися до ґрунту пристосовуючись до б) а =180° - 360°, екскаватор опирається на рельєфу ґрунту ЗОВНІШНІ лижі, а внутрішні 10 з рамою 1 Під час копання під дією ЗОВНІШНІХ СИЛ (вага підіймаються і спускаються екскаватора і сил на вершинах зубів) спрацьовує На протязі кожного напівциклу переміщення ефект саморегулювання, тобто повертання лиж в здійснюється підіймання машини (рами) на бік вирівнювання тиску на внутрішній і ЗОВНІШНІЙ відстань "є" (див фіг 4) лижах кожної сторони машини При різних швидкостях обертання, з'єднаних ЗОВНІШНІ розміри опорного контуру (периметру загальним приводом попарно спряжених а-в-г-д на фіг 2), які визначають СТІЙКІСТЬ машини привідних коліс 3, (тобто правого і лівого при копанні (під час стопоріння механізму підйому і приводів), наприклад, при повороті машини, рама виникненні великих зусиль на вершинах зубів відхиляється від горизонтального положення в ковша, які намагаються перекинути машину) поперечному напрямі збільшуються в порівнянні з розмірами контуру Одначе, кут найбільшого поперечного нахилу гусеничного ходу, при цьому габарити ходового при цьому невеликий Розрахунки показують, що пристрою в плані не збільшуються Разом з тим, в для кар'єрного екскаватора ЕКГ-10Н цей нахил порівнянні з традиційним гусеничним ходом, який дорівнює не більше 2,1 ° використовується для екскаваторів-лопат, такі В запропонованому крокуючому ході рух на переваги крокуючого ходу, як простота підйом по суті нічим не відрізняється від конструкцій, мала собівартість, а також висока прямолінійного на горизонтальному відрізку надійність і відсутність значного зношування, Поворот машини може здійснюватись зменшення експлуатаційних витрат на ремонт і - за рахунок вмикання одного приводу при відновлення є очевидними вимкненому другого, тобто за рахунок дії лиж Крім цього, запропонований крокуючий хід одної бокової сторони машини, забезпечує при копанні такі розміри опорного - за рахунок вмикання приводів правої і лівої контуру, які визначають СТІЙКІСТЬ машини і другі сторони з різними швидкостями в одному напрямі, перваги - шляхом крокування лижами кожної сторони в протилежних напрямках 46019 И 7 £ -і 4 12 Фіг. 2 Фіг. З 10 11 46019 Фіг. 4 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044)456-20- 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 12
ДивитисяДодаткова інформація
Автори англійськоюMarchenko Anatolii Ivanovych, Burenko Oleksandr Heorhiovych, Kalashnikov Oleh Yuriiovych
Автори російськоюМарченко Анатолий Иванович, Буренко Александр Георгиевич, Калашников Олег Юрьевич
МПК / Мітки
МПК: E02F 9/02
Мітки: екскаваторів-лопат, крокуючий, кар'єрних, хід, важких
Код посилання
<a href="https://ua.patents.su/6-46019-krokuyuchijj-khid-dlya-vazhkikh-karehrnikh-ekskavatoriv-lopat.html" target="_blank" rel="follow" title="База патентів України">Крокуючий хід для важких кар’єрних екскаваторів-лопат</a>
Ходовий механізм важких машин
Номер патенту: 13556
Опубліковано: 25.04.1997
Автори: Сорока Георгій Митрофанович, Давиденко Сергій Васильович, Олейник Сергій Леонідович
МПК: E02F 9/02
Мітки: механізм, важких, машин, ходовий
Формула / Реферат:
1. Ходовой механизм тяжелых горнотранспортных машин, включающий связанные между собой опорный узел, базу, поворотную платформу, балансирную балку, соединенную с ходовой рамой шарниром и стабилизаторами балансирной балки, отличающийся тем, что, с целью снижения металлоемкости механизма, каждый стабилизатор выполнен из оснащенного фрикционным элементом поворотного рычага, один конец которого шарнирно соединен с ходовой рамой, а другой имеет...
Ходове обладнання важких машин
Номер патенту: 13548
Опубліковано: 25.04.1997
Автори: Сорока Георгій Митрофанович, Фандєєв Юрій Іванович, Макаров Віктор Михайлович
МПК: E02F 9/02
Мітки: ходове, машин, обладнання, важких
Формула / Реферат:
1. Ходовое оборудование тяжелых машин, включающее опорную раму с опорами, поворотную платформу с плитой и ходовую раму с опорными элементами, связанную с канатным механизмом ее передвижения, отличающееся тем, что, с целью уменьшения металлоемкости и трудоемкости изготовления, ходовое оборудование снабжено группами блоков, связанных между собой посредством осей и образующих с канатами механизма передвижения бортовые полиспасты,...
Опорний візок важких машин
Номер патенту: 4010
Опубліковано: 27.12.1994
Автори: Кочергін Борис Михайлович, Черних Любов Яківна
МПК: E02F 9/02
Мітки: візок, опорний, важких, машин
Формула / Реферат:
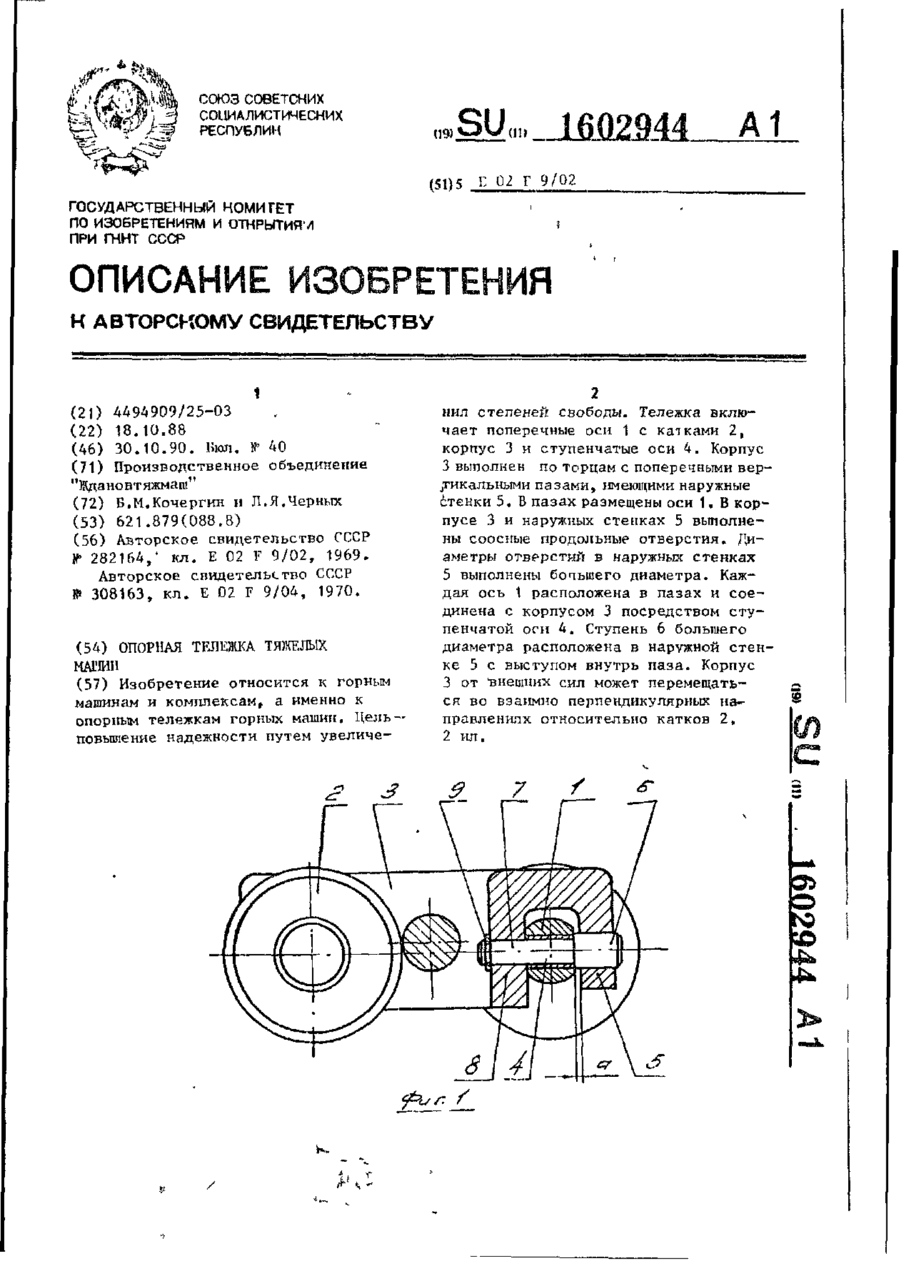
Опорная тележка тяжелых машин, включающая корпус, жестко соединенные с катками поперечные оси, отличающаяся тем, что, с целью повышения надежности путем увеличения количества степеней свободы, корпус выполнен по торцам с поперечными вертикальными пазами, имеющими наружные стенки, при этом в корпусе и наружных стенках выполнены соосные продольные отверстия, причем диаметры отверстий в наружных стенках выполнены большего диаметра, а каждая...
Різець для важких токарних верстатів
Номер патенту: 14352
Опубліковано: 25.04.1997
Автори: Мальцев Олег Сергійович, Суворов Олександр Семенович, Хает Григорій Львович, Гузенко Віталій Семенович, Гах Віталій Михайлович, Самойлов Володимир Сергійович
МПК: B23B 27/16
Мітки: токарних, верстатів, різець, важких
Формула / Реферат:
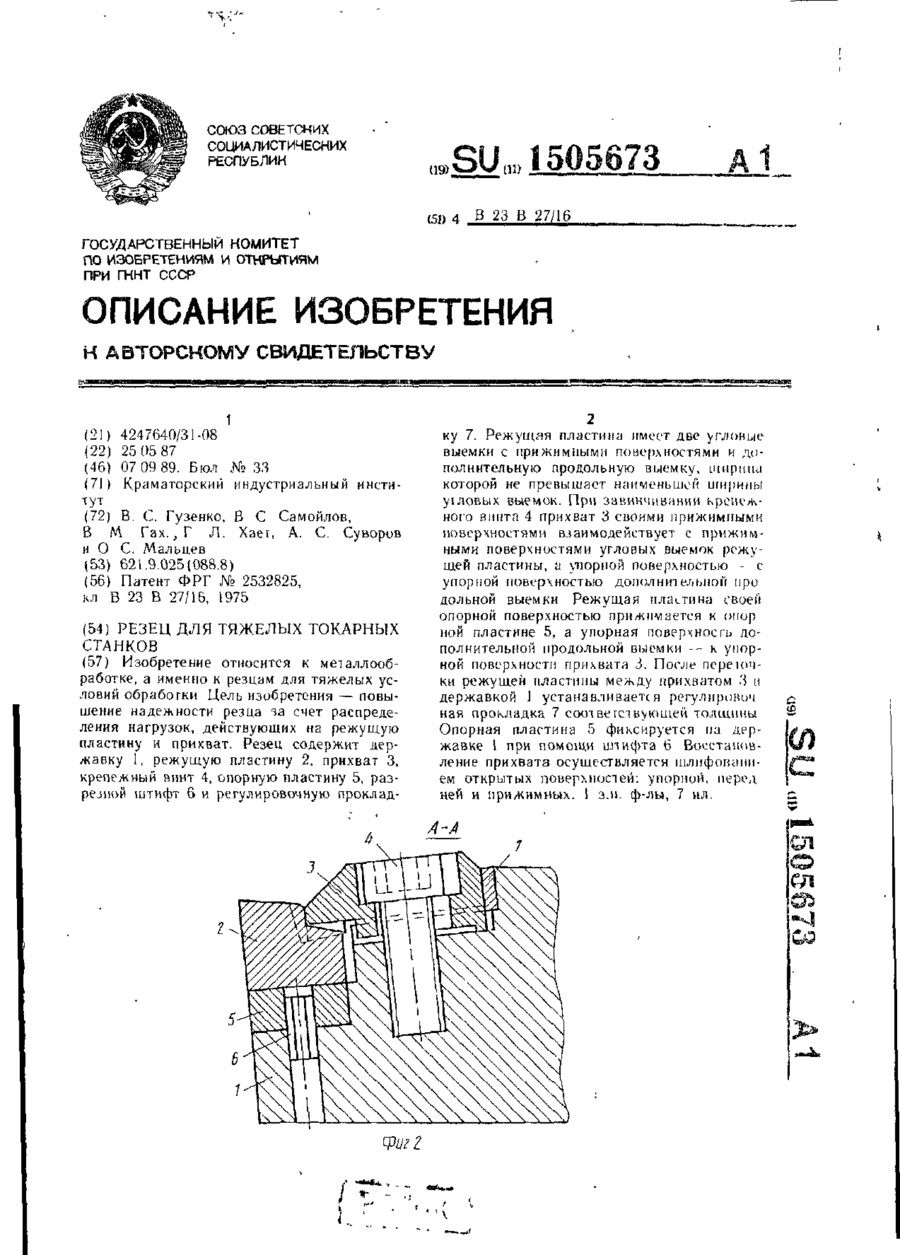
І. Резец для тяжелых токарных станков, содержащий державку, режущую пластину с двумя угловыми частично цилиндрическими выемками переменной ширины, расположенными со стороны упорной поверхности и сопряженными с прижимными выступами прихвата, отличающийся тем, что, с целью повышения надежности резца, на режущей пластине со стороны угловых выемок выполнена дополнительная продольная выемка шириной, не превышающей наименьшую ширину угловых...
Опорний візок важких машин

Номер патенту: 3329
Опубліковано: 27.12.1994
Автори: Сорока Георгій Митрофанович, Фельдман Леонід Рафаїлович
МПК: E02F 9/08
Мітки: важких, візок, опорний, машин
Формула / Реферат:
1. Опорная тележка тяжелых машин, включающая траверсу с плитой и поперечными стенками, соединенную продольными осями с баллансирами, связанными с катками, и имеющую поперечную ось для соединения с корпусом машины, отличающаяся тем, что траверса снабжена дополнительной плитой, жестко связанной с пoпeречными стенками, и вертикальной осью, размещенной в соосных отверстиях, выполненных в концевых частях плит, при этом балансиры размещены в окнах,...
Попередній патент: Спосіб детектування та визначення концентрації біомолекул та молекулярних комплексів та пристрій для його здійснення
Наступний патент: Похідні діалкілового етеру, фармацевтична композиція та способи профілактики і лікування захворювань
Випадковий патент: Замок запалення з подвійним блокуванням для автомобілів