Пристрій керування привідними рольгангами реверсивної кліті
Номер патенту: 112337
Опубліковано: 12.12.2016
Автори: Галушка Євген Іванович, Шаповалов Володимир Анатолійович, Грехов Андрій Георгійович, Литвинов Олег Олександрович

Формула / Реферат
Пристрій керування привідними рольгангами реверсивної кліті, який містить блок формування співвідношення швидкостей рольгангів перед кліттю та за нею, датчики розхилу ненавантажених валків кліті та датчики зусилля прокатки, який відрізняється тим, що обладнаний програмованим логічним контролером, до входів якого підключені виходи блоків формування співвідношення швидкостей рольгангів та виходи датчиків розхилу ненавантажених валків й виходи датчиків зусилля прокатки, крім того пристрій оснащено датчиками ширини металу, виходи яких також підключені до входів контролера, причому до виходів контролера безпосередньо підключені електроприводи рольгангів перед кліттю і за нею, при цьому програмований логічний контролер оснащений програмним блоком розрахунку уставок обмеження динамічних моментів рольгангів.
Текст
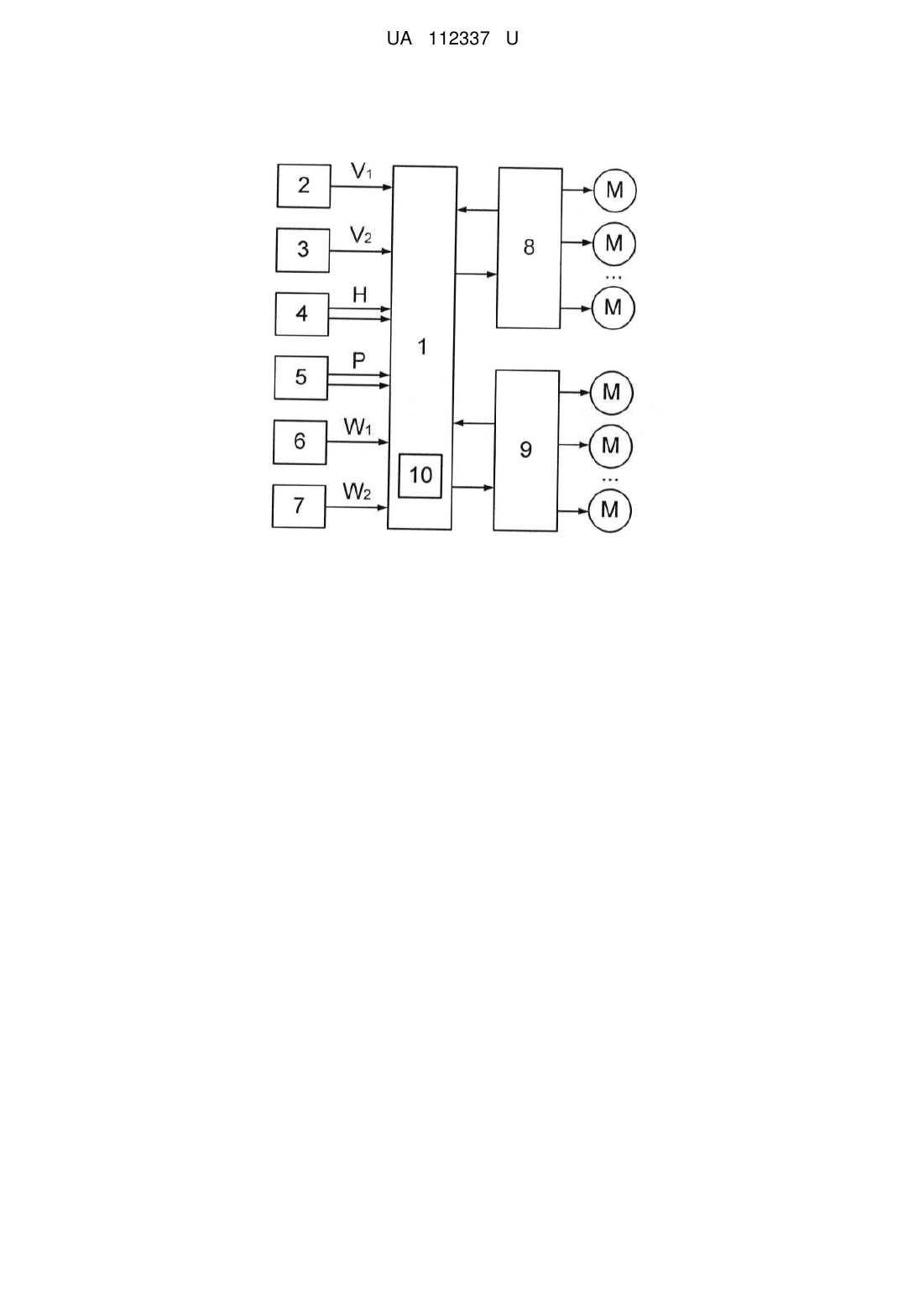
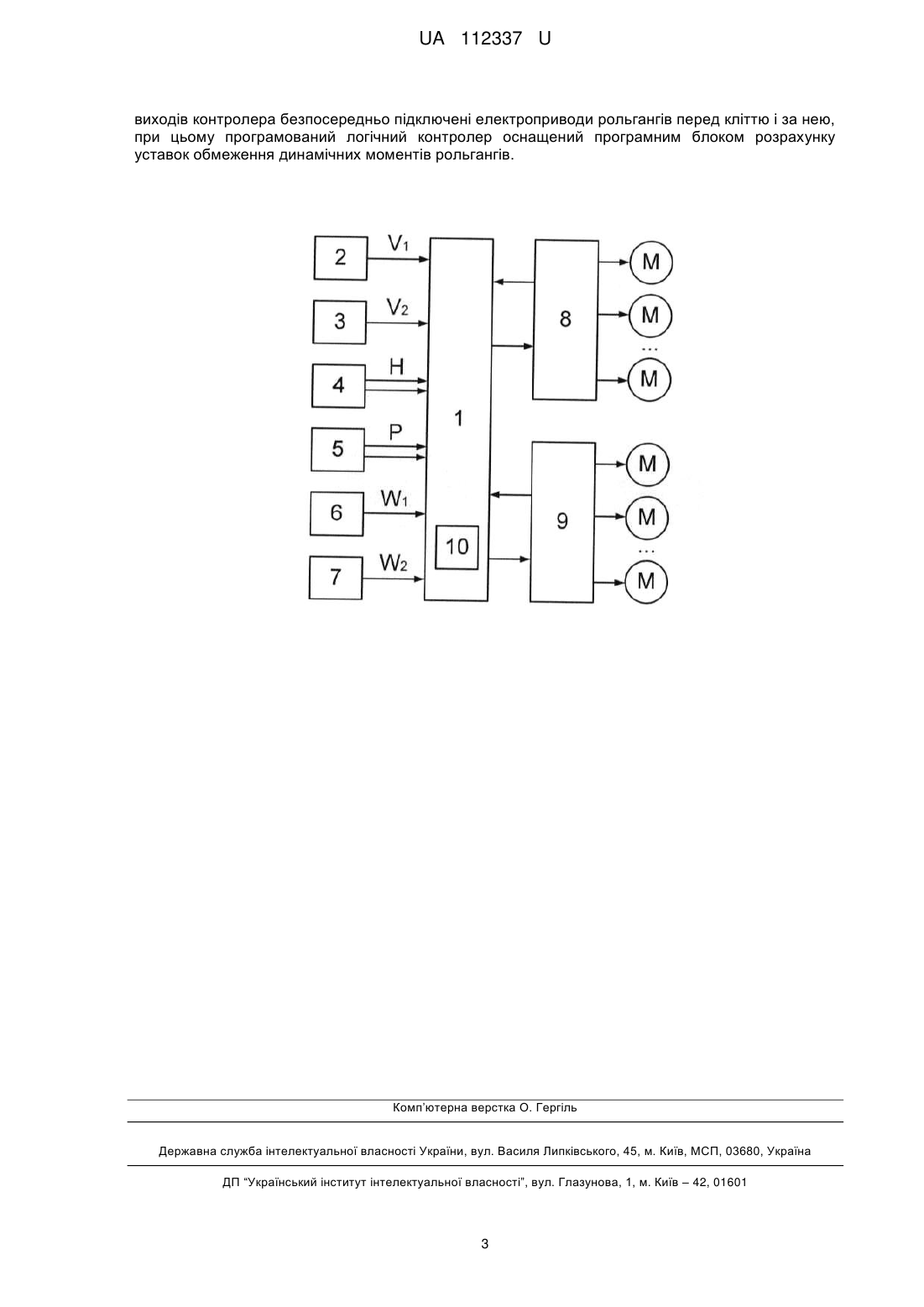
Реферат: Пристрій керування привідними рольгангами реверсивної кліті містить блок формування співвідношення швидкостей рольгангів перед кліттю та за нею, датчики розхилу ненавантажених валків кліті та датчики зусилля прокатки. Додатково пристрій обладнаний програмованим логічним контролером, до входів якого підключені виходи блоків формування співвідношення швидкостей рольгангів та виходи датчиків розхилу ненавантажених валків й виходи датчиків зусилля прокатки. Крім цього пристрій оснащено датчиками ширини металу, виходи яких також підключені до входів контролера. При цьому до виходів контролера безпосередньо підключені електроприводи рольгангів перед кліттю і за нею. Програмований логічний контролер оснащений програмним блоком розрахунку уставок обмеження динамічних моментів рольгангів. UA 112337 U (12) UA 112337 U UA 112337 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до автоматизації прокатного виробництва та може бути пристосована до прокатки металів для керування робочими рольгангами реверсивної кліті. Найбільш близьким до запропонованого технічного рішення, яке заявляється, є пристрій, який містить блоки формування співвідношення швидкостей рольгангів перед кліттю і за нею та перемикачі напрямку прокатки, також містить вимірювально-запам'ятовувальний блок товщини прокатки до та після пропуску, суматор з інверсним та неінверсним входами, блок розрахунку модуля, два блоки нелінійності і два блоки ділення. Крім цього є датчик розхилу ненавантажених валків і зусилля прокатки, причому на входи вимірювальнозапам'ятовувального блока підключені виходи датчиків розхилу ненавантажених валків і зусилля прокатки, а виходи - на входи суматора, вихід останнього з'єднаний з блоком розрахунку модуля, вихід якого через блоки нелінійності підключений на входи "Ділене" двох блоків ділення, входи "Дільник" яких через контакти перемикача напрямку прокатки з'єднані з виходами вимірювально-запам'ятовувального блока, а виходи блоків ділення - із входами блоків формування співвідношення швидкостей рольгангів, виходи яких з'єднані з входами систем регулювання швидкостей рольгангів перед кліттю і за нею [патент SU 854479]. Недоліком відомого пристрою є те, що при керуванні рольгангами в ньому не враховуються обмеження динамічних навантажень в приводах рольгангів при прискоренні металу перед його задаванням в кліть та при уповільненні металу після наступного пропуску. В основу корисної моделі поставлено задачу підвищення довговічності роликів рольгангів й зменшення потужності двигунів приводів рольгангів реверсивної кліті. Поставлена задача вирішується за рахунок технічного результату, який полягає в зменшенні динамічних навантажень на приводи рольгангів при реверсивній прокатці, а також у виборі оптимальних значень граничних моментів при прискоренні та уповільненні рольгангів у функції товщини металу. Для досягнення вищевказаного результату пристрій керування привідними рольгангами реверсивної кліті, який містить блок формування співвідношення швидкостей рольгангів перед кліттю та за нею, датчики розхилу ненавантажених валків кліті й датчики зусилля прокатки, згідно з корисною моделлю, обладнаний програмованим логічним контролером, до входів якого підключені виходи блоків формування співвідношення швидкостей рольгангів та виходи датчиків розхилу ненавантажених валків й виходи датчиків зусилля прокатки, крім того пристрій оснащено датчиками ширини металу, виходи яких також підключені до входів контролера, причому до виходів контролера безпосередньо підключені електроприводи рольгангів перед кліттю і за нею, при цьому програмований логічний контролер оснащений програмним блоком розрахунку уставок обмеження динамічних моментів рольгангів. В результаті порівнювального аналізу запропонованого пристрою керування робочими рольгангами реверсивної кліті з прототипом встановлено, що існують наступні спільні ознаки: - блок формування співвідношення швидкостей рольгангів перед кліттю та за нею; - датчики розхилу ненавантажених валків кліті; - датчики зусилля прокатки; а також відмінні ознаки: - обладнання програмованим логічним контролером, до входів якого підключені виходи блоків формування співвідношення швидкостей рольгангів та виходи датчиків розхилу ненавантажених валків й виходи датчиків зусилля прокатки; - пристрій оснащено датчиками ширини металу, виходи яких також підключені до входів контролера; - до виходів контролера безпосередньо підключені електроприводи рольгангів перед кліттю і за нею; - програмований логічний контролер оснащений програмним блоком розрахунку уставок обмеження динамічних моментів рольгангів. Таким чином, запропонованій пристрій керування робочими рольгангами реверсивної кліті має нове конструктивне виконання вузлів та деталей, нові зв'язки вузлів та деталей, а також нове розміщення їх один відносно одного. Причинно-наслідковий зв'язок між сукупністю ознак, що заявляються, та технічним результатом полягає у такому. Завдяки тому, що пристрій обладнаний програмованим логічним контролером, до входів якого підключені виходи блоків формування співвідношення швидкостей рольгангів та виходи датчиків розхилу ненавантажених валків й виходи датчиків зусилля прокатки, крім того пристрій оснащено датчиками ширини металу, виходи яких також підключені до входів контролера, причому до виходів контролера безпосередньо підключені електроприводи рольгангів перед кліттю і за нею, стало можливим задавати значення граничних моментів при прискоренні і 1 UA 112337 U 5 10 15 20 25 30 35 40 45 50 уповільненні в приводи рольгангів в залежності від відносної ваги металу на ролик в кожному пропусканні, тим самим зменшити динамічні навантаження в механічному обладнанні й також зменшити потужність двигунів та електроприводів. Завдяки тому, що програмований логічний контролер містить програмний блок розрахунку уставок обмеження динамічних моментів рольгангів, то в залежності від товщині металу розраховується маса металу, яка припадає на один ролик при індивідуальному приводі чи на секцію роликів при груповому приводі, а також визначаються уставки обмеження моменту при прискоренні та уповільненні металу в кожному пропусканні при прокатці в реверсивній кліті. Запобігання проковзуванню металу по роликам рольгангів при прискоренні та уповільненні підвищує стійкість технологічного процесу прокатки. Виключення із вищезазначеної сукупності відмітних ознак хоча б однієї з них не забезпечує досягнення технічного результату. Технічне рішення, що заявляється, не відомо з рівня техніки й тому воно є новим. Рішення, що заявляється, промислово застосовано, так як його технологічне і технічне виконання не має труднощів. За цим технічним рішенням розроблений робочий проект системи керування робочими і розкочувальними рольгангами перед реверсивною кліттю кварто та за нею стану 2800 гарячої прокатки. Таким чином, технічному рішенню, що заявляється, може надаватися правова охорона, так як воно є новим й промислово застосовано, тобто відповідає критеріям корисної моделі. На кресленні зображена схема пристрою керування привідними рольгангами реверсивної кліті. Пристрій керування привідними рольгангами реверсивної кліті містить програмований логічний контролер 1, до входів якого підключені виходи блоків формування співвідношення швидкостей (V1) перед кліттю 2 та блоків формування співвідношення швидкостей (V2) за нею 3, датчики (Н) розхилу ненавантажених валків 4, датчики зусилля (Р) прокатки 5, датчики ширини металу (W 1) перед кліттю 6 та датчики ширини металу (W 2) за нею 7. Виходи контролера 1 підключені до електроприводів керування двигунами перед кліттю 8 та за нею 9. Виходи зворотного зв'язку електроприводів 8 та 9, в свою чергу, з'єднані з контролером 1, а їх силові виходи - з двигунами М рольгангів. Програмований логічний контролер 1 містить програмний блок 10 розрахунку уставок динамічних моментів рольгангів. Пристрій працює наступним чином. Перемикання напрямку прокатки виконує оператор чи здійснюється системою керування верхнього рівня. При цьому в блоках формування співвідношення швидкостей рольгангів 2 і 3 задаються швидкості рольгангів перед кліттю V1 та за нею V2. В програмному блоці розрахунку уставок динамічних моментів 10 контролера 1 за сигналом Н датчиків розхилу ненавантажених валків 4 та сигналам W 1 и W 2 датчиків ширини металу 6 і 7 розраховується відносна вага металу, що припадає на ролик перед кліттю та за нею, на основі якої розраховується очікуваний повний момент статичного опору при буксуванні та очікувані динамічні моменти при прискоренні й уповільненні за загальновідомими формулами. В програмний спосіб здійснюється порівняння розрахованих значень моментів, і те значення, що є меншим, записується до таблиці даних контролера 1. Перед пропуском з контролера 1 в електроприводи 8 і 9 надсилаються значення уставок обмеження моментів при прискоренні й при уповільненні металу на рольгангах. Електроприводи 8 і 9 керують швидкістю двигунів М рольгангів, що подають метал в кліть і приймають його із кліті (в залежності від напрямку прокатки), обмежуючи при цьому динамічне навантаження в механічних вузлах. Момент входу металу в кліть й виходу з неї побічно контролюється зміною сигналу датчиків зусилля Р прокатки 5. Таким чином, виконання пристрою керування привідними рольгангами реверсивної кліті відповідно з формулою корисної моделі дозволить підвищити довговічність роликів рольгангів й зменшити потужності двигунів приводів рольгангів реверсивної кліті. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 Пристрій керування привідними рольгангами реверсивної кліті, який містить блок формування співвідношення швидкостей рольгангів перед кліттю та за нею, датчики розхилу ненавантажених валків кліті та датчики зусилля прокатки, який відрізняється тим, що обладнаний програмованим логічним контролером, до входів якого підключені виходи блоків формування співвідношення швидкостей рольгангів та виходи датчиків розхилу ненавантажених валків й виходи датчиків зусилля прокатки, крім того пристрій оснащено датчиками ширини металу, виходи яких також підключені до входів контролера, причому до 2 UA 112337 U виходів контролера безпосередньо підключені електроприводи рольгангів перед кліттю і за нею, при цьому програмований логічний контролер оснащений програмним блоком розрахунку уставок обмеження динамічних моментів рольгангів. Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B21B 37/00, H02P 5/00
Мітки: привідними, пристрій, рольгангами, реверсивної, керування, кліті
Код посилання
<a href="https://ua.patents.su/5-112337-pristrijj-keruvannya-prividnimi-rolgangami-reversivno-kliti.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування привідними рольгангами реверсивної кліті</a>
Спосіб регулювання швидкостей головних електроприводів реверсивної універсальної кліті прокатного стана
Номер патенту: 31884
Опубліковано: 25.04.2008
Автори: Лук'янчиков Олександр Миколайович, Негрій Сергій Дмитрович, Келій Микола Анатолійович, Кулініч Олександр Григорович, Алхіменко Пилип Єфремович, Моргуліс Валерій Петрович
МПК: B21B 37/00
Мітки: регулювання, кліті, стана, швидкостей, головних, реверсивної, спосіб, прокатного, універсальної, електроприводів
Формула / Реферат:
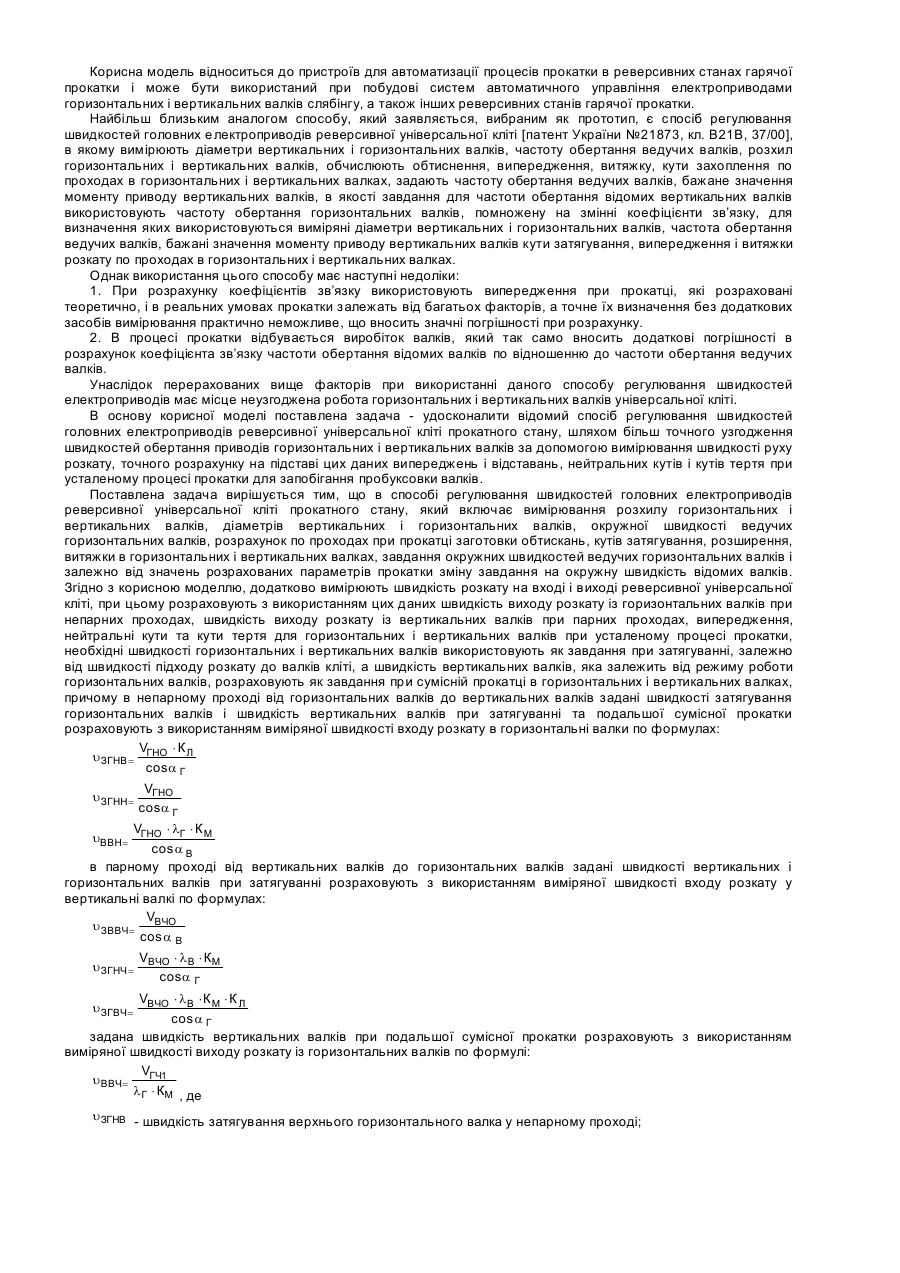
Спосіб регулювання швидкостей головних електроприводів реверсивної універсальної кліті прокатного стана, який включає вимірювання розхилу горизонтальних і вертикальних валків, діаметрів вертикальних і горизонтальних валків, колової швидкості ведучих горизонтальних валків, розрахунок по проходах при прокатці заготівки обтискання, кутів затягування, розширення, витяжки в горизонтальних і вертикальних валках, завдання колових швидкостей ведучих...
Спосіб регулювання швидкостей головних електроприводів реверсивної універсальної кліті прокатного стану
Номер патенту: 88810
Опубліковано: 25.11.2009
Автори: Келій Микола Анатолійович, Алхіменко Пилип Єфремович, Лук'янчиков Олександр Миколайович, Негрій Сергій Дмитрович, Моргуліс Валерій Петрович, Кулініч Олександр Григорович
МПК: B21B 37/46
Мітки: швидкостей, універсальної, кліті, спосіб, регулювання, головних, прокатного, електроприводів, стану, реверсивної
Формула / Реферат:
Спосіб регулювання швидкостей головних електроприводів реверсивної універсальної кліті прокатного стану, який включає вимірювання розхилу горизонтальних і вертикальних валків, їх діаметрів, колової швидкості ведучих горизонтальних валків, розрахунок обтискання, кутів затягування, розширення та витяжки заготівки по проходах при прокатці в горизонтальних і вертикальних валках, задання колових швидкостей ведучих горизонтальних валків і залежно...
Пристрій для автоматичного керування планшетністю штаби прокату
Номер патенту: 22004
Опубліковано: 10.04.2007
Автори: Попович Микола Гаврилович, Островерхов Микола Якович
МПК: B21B 37/00
Мітки: планшетністю, пристрій, прокату, керування, штаби, автоматичного
Формула / Реферат:
Пристрій для автоматичного керування планшетністю штаби прокату, що містить датчик розподілу натягу по ширині штаби, виходи якого по числу зон вимірювання з'єднані з входами регуляторів, виходи яких підключені до відповідних входів суматорів, та входом вузла визначення середньоарифметичного значення натягу штаби, виходи якого підключені до інших відповідних входів регуляторів, перетворювачі частоти з рекуперативним гальмуванням, виходи яких...
Спосіб регулювання швидкостей головних електроприводів реверсивної універсальної кліті
Номер патенту: 21873
Опубліковано: 30.04.1998
Автори: Нестеренко Олександр Анатольович, Світличний Олексій Васильович, Кузьмін Олександр Вікторович
МПК: B21B 37/00
Мітки: кліті, спосіб, реверсивної, універсальної, головних, електроприводів, швидкостей, регулювання
Формула / Реферат:
Способ регулирования скоростей главных электроприводов реверсивной универсальной клети, в котором измеряют диаметры вертикальных и горизонтальных валов, частоту вращения ведущих валков, растворы горизонтальных и вертикальных валков, вычисляют обжатия, опережения и вытяжки раската по проходам в вертикальных и горизонтальных валках, задают частоту вращения ведущих валков и в зависимости от значений указанных величин изменяют задание на...
Пристрій для виміру осередку деформації металу між валками прокатної кліті
Номер патенту: 92829
Опубліковано: 10.09.2014
Автори: Ступак Володимир Олександрович, Бортник Валерій Вікторович, Ростовський Костянтин Леонідович, Санжаревський Олег Васильович
МПК: B21B 31/10
Мітки: валками, пристрій, прокатної, осередку, кліті, виміру, деформації, металу
Формула / Реферат:
Пристрій для виміру осередку деформації металу між валками прокатної кліті, що містить верхні та нижні щупи, протилежно розташовані відносно осередку деформації й рухливо встановлені на несучій конструкції поруч із кліттю, а також зчленовані з вищезгаданими щупами датчики переміщення, пов'язані із системою автоматичного регулювання товщини металу, який відрізняється тим, що обладнаний додатковими верхніми й нижніми щупами, при цьому по...